泵系统、流体供给装置以及泵系统的驱动控制方法与流程
1.本发明涉及泵系统、流体供给装置以及泵系统的驱动控制方法。
背景技术:
2.例如,在专利文献1所记载的供水装置中,由于马达泵的转速的最佳值按照压力而不同,所以以相对于各压力成为最佳的转速的方式调整向马达泵供给的电压。并且,在专利文献2所记载的泵控制装置中,基于事先进行的泵性能的测定和安装于配管等的状态下的泵性能的测定结果来预测为了得到期望的流量而需要的必要转速,运算并输出成为预测出的必要转速所需的电压。并且,在专利文献3所记载的泵单元中,设置容积不同的两个泵部,以便能够在小型的马达中与高压力和高流量分别对应,根据压力的状态来切换泵部。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2002-031078号公报
6.专利文献2:日本特开2001-342966号公报
7.专利文献3:日本特开2004-011597号公报
技术实现要素:
8.发明所要解决的课题
9.然而,在专利文献1中,由于马达的转速根据电压而变化,所以需要与由转速的变化引起的设备的共振现象所产生的异响、故障等应对。因此,设备的结构变得复杂。并且,在专利文献2中,为了运算并输出需要的电压,需要多个运算。因此,设备、尤其是电路结构的结构变得烦杂。并且,在专利文献3中,需要多个泵部和切换上述多个泵部的机构。因此,设备变得大型,并且结构变得复杂。
10.本发明是鉴于上述问题而完成的,其目的在于,提供能够以简单的结构来发挥优异的流量特性的泵系统、流体供给装置以及泵系统的驱动控制方法。
11.用于解决课题的方案
12.这样的目的通过以下的(1)~(7)的本发明来实现。
13.(1)一种泵系统,其特征在于,具备:
14.通过施加交变电压来进行电磁驱动的振动驱动器;
15.与吸入口及喷出口连接的密闭室;以及
16.使上述密闭室的容积变化的可动壁,
17.通过上述振动驱动器的驱动,从而上述可动壁位移,上述密闭室内的流体被供给到对象物,
18.以使上述振动驱动器的振幅变得恒定的方式控制上述交变电压的有效值。
19.(2)根据上述(1)所述的泵系统,通过使上述交变电压的振幅变化来控制上述有效值。
20.(3)根据上述(1)所述的泵系统,上述交变电压是矩形波,
21.通过使上述交变电压的振幅以及占空比中的至少一方变化来控制上述有效值。
22.(4)根据上述(1)至(3)任一项中所述的泵系统,检测上述对象物内的压力,并基于检测出的压力来控制上述有效值。
23.(5)根据上述(1)至(4)任一项中所述的泵系统,上述振动驱动器的共振频率根据上述对象物内的压力而变化。
24.(6)一种流体供给装置,其特征在于,具备上述(1)~(5)任一项中所述的泵系统。
25.(7)一种泵系统的驱动控制方法,该泵系统具备:
26.通过施加交变电压来进行电磁驱动的振动驱动器;
27.与吸入口及喷出口连接的密闭室;以及
28.使上述密闭室的容积变化的可动壁,
29.通过上述振动驱动器的驱动,从而上述可动壁位移,上述密闭室内的流体被供给到对象物,
30.上述泵系统的驱动控制方法的特征在于,
31.以使上述振动驱动器的振幅变得恒定的方式控制上述交变电压的有效值。
32.发明的效果如下。
33.在本发明的泵系统中,以使振动驱动器的振幅变得恒定的方式控制交变电压的有效值。因此,能够阻止伴随对象物内的压力上升产生的振幅的降低,成为能够发挥优异的流量特性的泵系统。
34.并且,本发明的流体供给装置具备上述的泵系统。因此,能够享有泵系统的效果,成为能够发挥优异的流量特性的流体供给装置。
35.在本发明的泵系统的驱动控制方法中,以使振动驱动器的振幅变得恒定的方式控制交变电压的有效值。因此,能够阻止伴随对象物内的压力上升产生的振幅的降低,使泵系统发挥优异的流量特性。
附图说明
36.图1是示出优选的实施方式的电子血压计的整体结构的立体图。
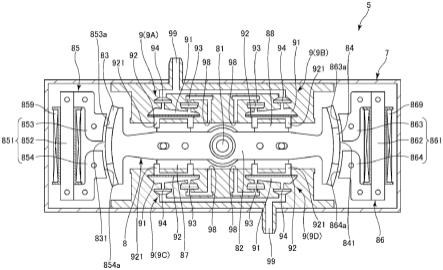
37.图2是泵的剖视图。
38.图3是示出图2所示的泵的驱动原理的剖视图。
39.图4是示出图2所示的泵的驱动原理的剖视图。
40.图5是示出振动驱动器所具有的弹簧系统的示意图。
41.图6是示出驱动频率与振幅的关系的曲线图。
42.图7是示出驱动频率与流量的关系的曲线图。
43.图8是示出密闭室内的压力与振幅的关系的曲线图。
44.图9是示出密闭室内的压力与流量的关系的曲线图。
45.图10是示出密闭室内的压力与振幅的关系的曲线图。
46.图11是示出密闭室内的压力与流量的关系的曲线图。
47.图12是示出交变电压的波形的一例的图。
48.图13是示出交变电压的波形的一例的图。
49.图14是示出交变电压的波形的一例的图。
50.图15是示出交变电压的波形的一例的图。
51.图中:
52.1—电子血压计,2—袖带(对象物),3—主体,4—管,5—泵,6—控制装置,7—壳体,8—振动驱动器,9、9a、9b、9c、9d—泵部,10—泵系统,61—驱动控制部,62—压力检测部,81—轴部,82—可动体,83、84—磁体,85、86—线圈磁心部,87、88—按压件,91—密闭室,92—可动壁,93、94—阀,98—吸入口,99—喷出口,100—压力传感器,831、841—磁极面,851、861—磁心部,852、862—芯部,853、854、863、864—磁心磁极,853a、854a、863a、864a—磁极面,859、869—线圈,921—插入部,b1—磁性弹簧,b2—空气弹簧(流体弹簧),b3—弹性,e—交变电压,emax—最大电压值,f1、f2—转矩,q—流量,y—振幅,yt—目标振幅,f—驱动频率。
具体实施方式
53.以下,基于在附图中示出的优选的实施方式,详细地对本发明的泵系统、流体供给装置以及泵系统的驱动控制方法进行说明。
54.图1是示出优选的实施方式的电子血压计的整体结构的立体图。图2是泵的剖视图。图3是示出图2所示的泵的驱动原理的剖视图。图4是示出图2所示的泵的驱动原理的剖视图。图5是示出振动驱动器所具有的弹簧系统的示意图。图6是示出驱动频率与振幅的关系的曲线图。图7是示出驱动频率与流量的关系的曲线图。图8是示出密闭室内的压力与振幅的关系的曲线图。图9是示出密闭室内的压力与流量的关系的曲线图。图10是示出密闭室内的压力与振幅的关系的曲线图。图11是示出密闭室内的压力与流量的关系的曲线图。图12至图15分别是示出交变电压的波形的一例的图。此外,以下,为了便于说明,也将图2至图4中的纸面上侧称为“上”,将下侧称为“下”。
55.图1示出作为流体供给装置的电子血压计1。电子血压计1具有袖带2、主体3以及连接袖带2和主体3的供排气用的管4。袖带2佩戴于受检者的被测定部位、例如手臂,通过来自主体3的流体供给,位于内部的袋体膨胀而压迫被测定部位。主体3测定袖带2(对象物)内的压力,并基于该测定结果来计算受检者的血压。作为上述流体,没有特别限定,可以是液体,也可以是气体,但优选为气体。以下,为了便于说明,将上述流体设为空气进行说明。
56.在按照通常的示波法测定血压的情况下,如下记载。首先,在受检者的被测定部位卷绕袖带2。然后,在测定血压时,从主体3向袖带2内供给空气,使袖带2内的压力(袖带压力)比最高血压高。之后逐渐减压,在该过程中由主体3检测袖带2内的压力,获取在被测定部位的动脉产生的动脉容积的变动作为脉搏波信号。基于伴随此时的袖带压力的变化产生的脉搏波信号的振幅的变化、主要基于上升和下降来计算最高血压(收缩期血压)以及最低血压(舒张期血压)。但是,作为血压测定方法没有特别限定。例如,也可以利用通常与示波法一起使用的里瓦罗奇
·
柯氏法。
57.如图1所示,在主体3设有检测袖带2内的压力的压力传感器100。并且,在主体3设有泵系统10,该泵系统10具备向袖带2供给空气的泵5、以及控制装置6,该控制装置6基于来自压力传感器100的输出信号来检测袖带2内的压力,并基于检测出的袖带2内的压力来控制泵5的驱动。
58.如图2所示,泵5具有壳体7、振动驱动器8以及泵部9。
59.振动驱动器8具有轴部81、经由轴部81可动自如地被支撑于壳体7的可动体82、以及固定于壳体7的一对线圈磁心部85、86。
60.可动体82呈长条,在其中央部经由轴部81与壳体7连接。因此,可动体82相对于壳体7以轴部81为中心如跷跷板那样往复旋转。
61.在可动体82的两端部设有磁体83、84。上述磁体83、84相对于轴部81对称地配置。并且,磁体83、84具有与线圈磁心部85、86对置的圆弧状的磁极面831、841。在磁极面831、841,沿圆弧方向交替地配置有s极和n极。上述磁体83、84是永久磁铁,例如由nd烧结磁体等构成。
62.在可动体82设有在可动体82往复旋转时按压泵部9的按压件87、88。上述按压件87、88相对于轴部81对称地配置。按压件87配置于轴部81与磁体83之间,向可动体82的宽度方向两侧(图2中上下方向两侧)突出。并且,按压件88配置于轴部81与磁体84之间,向可动体82的宽度方向两侧(图2中上下方向两侧)突出。
63.线圈磁心部85、86配置于可动体82的两侧,线圈磁心部85与磁体83的磁极面831对置,线圈磁心部86与磁体84的磁极面841对置。上述线圈磁心部85、86相对于轴部81对称地配置。
64.线圈磁心部85具有磁心部851和缠绕于磁心部851的线圈859。并且,磁心部851具有缠绕有线圈859的芯部852和从芯部852的两端延伸出的一对磁心磁极853、854。并且,磁心磁极853、854具有与磁体83的磁极面831对置的磁极面853a、854a。并且,磁极面853a、854a分别仿照磁体83的磁极面831呈圆弧状地弯曲。并且,线圈859与控制装置6连接,通过从控制装置6施加交变电压e,来对磁心磁极853、854进行励磁。
65.线圈磁心部86具有磁心部861和缠绕于磁心部861的线圈869。并且,磁心部861具有缠绕有线圈869的芯部862和从芯部862的两端延伸出的一对磁心磁极863、864。并且,磁心磁极863、864具有与磁体84的磁极面841对置的磁极面863a、864a。并且,磁极面863a、864a分别仿照磁体84的磁极面841呈圆弧状地弯曲。并且,线圈869与控制装置6连接,通过从控制装置6施加交变电压e,来对磁心磁极863、864进行励磁。
66.磁心部851、861分别是通过对线圈859、869通电而进行磁化的磁性体,例如由电磁不锈钢、烧结材料、mim(金属注射模制)材料、层叠钢板、电镀锌钢板(secc)等构成。
67.泵部9相对于轴部81在上下左右分开地配置有四个。具体而言,两个泵部9经由一方的按压件87上下对置配置,剩余的两个泵部9经由另一方的按压件88上下对置配置。上述四个泵部9彼此结构相同,分别具有密闭室91和可动壁92。
68.密闭室91与从外部吸入空气的吸入口98以及喷出密闭室91内的空气的喷出口99连接。此外,在本实施方式中,相对于可动体82位于上侧的两个密闭室91共有一个喷出口99,相对于可动体82位于下侧的两个密闭室91共有一个喷出口99。
69.可动壁92构成密闭室91的一部分。可动壁92通过被按压件87、88按压而位移,使密闭室91内的容积变化。若密闭室91内的容积因可动壁92的位移而减少,则密闭室91内的空气从喷出口99喷出,相反,若密闭室91内的容积增加,则空气从吸入口98流入到密闭室91内。通过重复进行这样的密闭室91内的容积的减少和增加,来连续地从喷出口99喷出空气。可动壁92例如是膜片,由能够弹性变形的材料形成。并且,可动壁92具有供按压件87、88插
入的插入部921,且经由插入部921与按压件87、88连接。
70.并且,在密闭室91与吸入口98之间设有阀93。阀93允许从吸入口98向密闭室91吸入空气,而限制从密闭室91向吸入口98喷出空气。并且,在密闭室91与喷出口99之间设有阀94。阀94允许从密闭室91向喷出口99喷出空气,而限制从喷出口99向密闭室91吸入空气。由此,能够更可靠且更高效地进行空气的抽吸和喷出。
71.如图1所示,控制装置6具有:压力检测部62,其基于压力传感器100的输出信号来检测袖带2内的压力;以及驱动控制部61,其基于压力检测部62所检测出的袖带2内的压力来控制振动驱动器8的驱动。这样的控制装置6例如由计算机构成,具有处理信息的处理器(cpu)、以能够进行通信的方式与处理器连接的存储器、以及外部接口。并且,在存储器中保存有能够由处理器执行的各种程序,处理器读取在存储器中存储的各种程序等并执行。
72.以上,对电子血压计1的结构进行了说明。接下来,对泵5的驱动进行说明。此外,以下,为了便于说明,将四个泵部9记载为“泵部9a”、“泵部9b”、“泵部9c”以及“泵部9d”来进行区别。
73.若从驱动控制部61向线圈859、869施加交流电压e,则泵5重复在第一状态与第二状态之间驱动,第一状态是如图3所示地可动体82向一方侧旋转的状态,第二状态是如图4所示地可动体82向另一方侧旋转的状态。在图3所示的第一状态下,磁心磁极853、864分别励磁为n极,磁心磁极854、863分别励磁为s极。相反,在图4所示的第二状态下,磁心磁极853、864分别励磁为s极,磁心磁极854、863分别励磁为n极。
74.在第一状态下,利用在磁体83、84与线圈磁心部85、86之间作用的磁力(吸引力、排斥力)产生箭头方向的转矩f1,从而可动体82沿转矩f1的方向旋转。由此,在泵部9a、9d中,可动壁92由按压件87、88按压,密闭室91内的容积减少,密闭室91内的空气从喷出口99喷出。然后,被喷出的空气经由管4向袖带2内供给,袖带2内的压力上升。相反,在泵部9b、9c中,密闭室91内的容积增加,空气从吸入口98流入到密闭室91内。
75.在第二状态下,利用在磁体83、84与线圈磁心部85、86之间作用的磁力(吸引力、排斥力)产生与转矩f1方向相反的转矩f2,从而可动体82沿转矩f2的方向旋转。由此,在泵部9b、9c中,可动壁92由按压件87、88按压,密闭室91内的容积减少,密闭室91内的空气从喷出口99喷出。然后,被喷出的空气经由管4向袖带2内供给,袖带2内的压力上升。相反,在泵部9a、9d中,密闭室91内的容积增加,空气从吸入口98流入到密闭室91内。
76.这样,若交替地重复第一状态和第二状态,则交替地重复从泵部9a、9d喷出空气的状态和从泵部9b、9c喷出空气的状态,从而连续地从泵5喷出空气。因此,能够高效地向袖带2供给空气,能够使袖带2内的压力顺畅地上升。
77.以上,对泵5的驱动进行了说明。接下来,对泵5的驱动原理进行说明。振动驱动器8基于下述式(1)所示的运动方程式以及下述式(2)所示的电路方程式进行驱动。
78.[式1]
[0079][0080]
j:惯性力矩[kg
·
m2]
[0081]
θ(t):位移角[rad]
[0082]kt
:转矩常数[nm/a]
[0083]
i(t):电流[a]
[0084]ksp
:弹簧常数[n/m]
[0085]
d:衰减系数[nm/(rad/s)]
[0086]
[式2]
[0087][0088]
e(t):电压[v]
[0089]
r:电阻[ω]
[0090]
l:电感[h]
[0091]
ke:反电动势常数[v/(m/s)]
[0092]
这样,可动体82的惯性力矩j[kg
·
m2]、位移角(旋转角度)θ(t)[rad]、转矩常数k
t
[nm/a]、电流i(t)[a]、弹簧常数k
sp
[nm/rad]、衰减系数d[nm/(rad/s)]等能够分别在满足式(1)的范围内适当地设定。同样,电压e(t)[v]、电阻r[ω]、电感l[h]、反电动势常数ke[v/(m/s)]能够分别在满足式(2)的范围内适当地设定。
[0093]
并且,在泵5中,根据下述式(3)设定流量,根据下述式(4)设定压力。
[0094]
[式3]
[0095]
q=axf*60-(3)
[0096]
q:流量[l/min]
[0097]
a:活塞面积[m2]
[0098]
x:活塞位移[m]
[0099]
f:驱动频率[hz]
[0100]
[式4]
[0101][0102]
p:增加压力[kpa]
[0103]
p0:大气压[kpa]
[0104]
v:密闭室容积[m3]
[0105]
δv:变动容积[m3]
[0106]
δv=ax
[0107]
a:活塞面积[m2]
[0108]
x:活塞位移[m]
[0109]
这样,泵5的流量q[l/min]、活塞面积a[m2]、活塞位移x[m]、驱动频率f[hz]等能够分别在满足式(3)的范围内适当地设定。并且,增加压力[kpa]、大气压p0[kpa]、密闭室容积v[m3]、变动容积δv[m3]等能够分别在满足式(4)的范围内适当地设定。
[0110]
接下来,对振动驱动器8的共振频率进行说明。如图5所示,振动驱动器8具有利用磁性弹簧b1和空气弹簧(流体弹簧)b2来支撑可动体82的弹簧质量系统构造,其中,磁性弹簧b1由在线圈磁心部85、86以及磁体83、84之间作用的磁力形成,空气弹簧b2由密闭室91内
的压缩空气的弹力形成。因此,可动体82具有下述式(5)所示的共振频率fr。
[0111]
[式5]
[0112][0113]fr
:共振频率[hz]
[0114]ksp
:弹簧常数[n/m]
[0115]
j:惯性力矩[kg
·
m2]
[0116]
另外,如下述式(6)所示,弹簧常数k
sp
由包括磁性弹簧b1、可动壁92的弹性b3在内的振动驱动器8自身的弹簧常数k
act
与空气弹簧b2的弹簧常数k
air
之和表示。
[0117]
[式6]
[0118]ksp
=k
act
+k
air-(6)
[0119]kact
:振动驱动器自身的弹簧常数
[0120]kair
:空气弹簧的弹簧常数
[0121]
从上述式(5)及式(6)可知,在振动驱动器8中,空气弹簧b2的弹簧常数k
air
根据密闭室91内的压力(袖带2内的压力)而变化,伴随于此,可动体82的共振频率fr变化。
[0122]
接下来,对由共振频率fr的变化引起的振动驱动器8的振幅y以及从泵5喷出的空气的流量q的变动进行说明。此外,以下,为了便于说明,以最大能够将袖带2内的压力提高到50kpa的泵5为代表进行说明。但是,作为压力的最大值,没有特别限定,能够以符合所要求的条件的方式适当地设定。并且,如上所述,由于袖带2与密闭室91经由管4连接,所以它们成为相同的压力。因此,“密闭室91内的压力”与“袖带2内的压力”意义相同。
[0123]
图6示出袖带2内的压力为0kpa~50kpa时的驱动频率f与振幅y的关系。并且,图7示出袖带2内的压力为0kpa~50kpa时的驱动频率f与流量q的关系。此外,驱动频率f是交变电压e的频率。并且,图6及图7中,交变电压e的电压值、波形是恒定的,仅使驱动频率f变化。图6中,振幅y最大的驱动频率f与共振频率fr大致一致。并且,图7中,流量q最大的驱动频率f与共振频率fr大致一致。这样,从图6及图7也可知,共振频率fr根据袖带2内的压力而变化。但是,图6及图7所示的关系是一个例子,本发明并不限定于该关系。
[0124]
图8示出驱动频率f=fn时的密闭室91的内压与振幅y的关系。并且,图9示出驱动频率f=fn时的密闭室91的内压与流量q的关系。从图8及图9可知,振幅y根据袖带2内的压力而变动,伴随于此,流量q变动。具体而言,可知袖带2内的压力越高,则振幅y越低,伴随于此,流量q越低。这表示为,在共振频率fr伴随袖带2内的压力上升而升高的过程中,驱动频率f越接近共振频率fr,则振幅y越大,流量q越高,相反,驱动频率f越远离共振频率fr,则振幅y越小,流量q越低。
[0125]
这样,若流量q随着袖带2内的压力升高而降低,则流量q不稳定,并且,在高压区域内无法向袖带2内供给充足量的空气。因此,无法使袖带2内的压力顺畅地上升。这样,在与袖带2内的压力无关而施加恒定的交变电压e的方法中,不会成为具有优异的流量特性的泵5。
[0126]
与此相对,若能够抑制振幅y随着袖带2内的压力的上升而减少,并在0kpa~50kpa之间始终以充分大的振幅y使振动驱动器8振动,则能够抑制上述那样的流量q的降低,流量
q稳定,即使在高压区域内,也能够向袖带2内供给充足量的空气。因此,在本实施方式中,以在0kpa~50kpa的整个范围内维持充分大的振幅y的方式控制交变电压e的有效值。以下,对此进行说明。
[0127]
首先,作为前提,在泵5的驱动中,驱动频率f是恒定的。作为驱动频率f,没有特别限定,例如能够如下决定。驱动频率f越接近共振频率fr,则振幅y越大,流量q越高。另外,驱动频率f越接近共振频率fr,则越接近共振驱动,能够实现振动驱动器8的省电驱动。因此,优选将位于0kpa~50kpa之间且位于共振频率fr的最小值与最大值之间的频率设定为驱动频率f。也就是说,在图6及图7所示的例子中,优选将位于0kpa时的共振频率fr与50kpa时的共振频率fr之间的频率设定为驱动频率f。由此,能够在0kpa~50kpa之间将驱动频率f与共振频率fr之差抑制得较小,容易得到上述的效果。基于这样的理由,在上述的说明中,设为驱动频率f=fn。
[0128]
在驱动控制部61中存储有作为振幅y的目标值的目标振幅yt。作为目标振幅yt,没有特别限定,越大越好。通过将目标振幅yt设定得尽可能大,成为更大的流量q,实现泵5的流量特性的提高。目标振幅yt例如设定为相对于能够由振动驱动器8产生的最大振幅具有用于避免故障等风险的余量,例如能够设定为最大振幅的80%~95%左右。由此,能够确保泵5的寿命、长期可靠性,并且能够充分地发挥泵5的力。
[0129]
并且,驱动控制部61具有用于在0kpa~50kpa之间将振幅y维持为目标振幅yt的控制程序。作为该控制程序,没有特别限定,例如可以举出具备将袖带2内的压力与用于在该压力时使振幅y成为目标振幅yt的交变电压e的有效值相关联的表格、在代入袖带2内的压力时计算用于在该压力时使振幅y成为目标振幅yt的交变电压e的有效值的计算式等。
[0130]
驱动控制部61根据控制程序来求出与压力检测部62所检测出的袖带2内的压力对应的交变电压e的有效值作为“目标有效值”,并且以成为所求出的目标有效值的方式控制交变电压e。作为控制方法,没有特别限定,例如,可以举出反馈控制,即,一边比较实际的有效值和目标有效值,一边以使实际的有效值接近目标有效值(优选为一致)的方式控制交变电压e。
[0131]
根据这样的控制,如图10所示,在0kpa~50kpa之间将振幅y维持为目标振幅yt。也就是说,振幅y维持为恒定。由此,抑制在图8中示出的伴随袖带2内的压力上升产生的振幅y的降低。而且,与此相伴随地,如图11所示,伴随袖带2内的压力上升产生的流量q的减少程度与图9所示的情况相比变小。因此,与交变电压e恒定的情况相比,泵系统10能够发挥更优异的流量特性。此外,上述“振幅y恒定”是指,除了振幅y始终维持为目标振幅yt的情况之外,还包括因装置结构、电路结构等而在目标振幅yt附近波动的状态。
[0132]
并且,根据泵系统10,既不会如专利文献2那样使控制方法变得复杂,也不需要如专利文献3那样设置容积不同的多个泵部。因此,泵系统10能够以简单的结构来发挥优异的流量特性。并且,如上所述,振动驱动器8的共振频率fr由惯性力矩j和弹簧常数k
sp
决定,不会根据交变电压e的有效值而变化。因此,不需要与由泵5的共振现象引起的异响、故障等应对,或者即使需要这样的应对,该应对也比专利文献1的使用马达的情况容易。从这一方面看,泵系统10也能够以简单的结构来发挥优异的流量特性。
[0133]
此外,作为交变电压e的波形,没有特别限定,例如可以是图12所示的正弦波,也可以是图13所示的三角波,也可以是图14所示的锯齿波,还可以是图15所示的矩形波。其中,
作为交变电压e的波形,基于不易产生噪声等理由,优选为图12所示的正弦波。但是,相反地,正弦波与其它波形相比,波形生成电路容易变得昂贵。因此,在想要形成更廉价的泵系统10的情况下,优选设为三角波、锯齿波、矩形波。
[0134]
在使用图12、图13以及图14所示的正弦波、三角波以及锯齿波作为交变电压e的情况下,作为控制交变电压e的有效值的方法,例如有使最大电压值emax变化的方法。最大电压值emax越大,则有效值越大,相反,最大电压值emax越小,则有效值越小。
[0135]
另一方面,在使用图15所示的矩形波作为交变电压e的情况下,作为使交变电压e的有效值变化的方法,有使最大电压值emax变化的方法和使占空比(=a/b)变化的方法。与其它波形相同,最大电压值emax越大,则有效值越大,相反,最大电压值emax越小,则有效值越小。并且,占空比(duty比)越大,则有效值越大,相反,占空比越小,则有效值越小。驱动控制部61既可以控制上述双方,也可以仅控制任一方。根据控制两者的方法,与控制任一方的情况相比,能够更细致地控制有效值。在控制任一方的情况下,成为比控制双方的情况简单的控制,电路结构等变得简单。
[0136]
以上,对驱动控制部61所进行的泵5的驱动控制方法进行了说明。在上述的泵5的驱动控制方法中,压力检测部62基于压力传感器100的输出信号来检测袖带2内的压力,驱动控制部61基于该检测结果来控制交变电压e的有效值,但作为泵5的驱动控制方法,只要能够使振幅y恒定即可,没有特别限定。
[0137]
例如,基于袖带2内的容积和在目标振幅yt时得到的流量q,通过实验、模拟等事先求出每单位时间的袖带2内的压力上升量。由此,能够推断从泵5的驱动开始时刻起的经过时间与该经过时间时的袖带2内的压力之间的关系。因此,也可以使驱动控制部61具有控制程序,该控制程序具备将从泵5的驱动开始时刻起的经过时间与在该经过时间时用于使振幅y成为目标振幅yt的交变电压e的有效值相关联的表格(时序表格)、在代入从泵5的驱动开始时刻起的经过时间时计算用于在该经过时间时使振幅y成为目标振幅yt的交变电压e的有效值的计算式等,基于该控制程序来控制泵5的驱动。根据这样的方法,不需要反馈袖带2内的压力,因此电路结构变得更简单。
[0138]
以上,基于图示的实施方式对本发明的泵系统、流体供给装置以及泵系统的驱动控制方法进行了说明,但本发明并不限定于此,各部分的结构能够置换为具有相同功能的任意结构。并且,也可以在本发明中附加其它任意的构成物。
[0139]
并且,例如,在上述的实施方式中,将泵系统以及流体供给装置应用于电子血压计1,但并不限定于此,能够应用于需要流体的供给的任何器具。并且,例如,在上述的实施方式中,泵5具有四个泵部9,但并不限定于此,只要具有至少一个泵部9即可。
[0140]
并且,作为振动驱动器8的结构,只要是消耗电流根据密闭室91内的压力而变化的结构即可,没有特别限定。例如,在上述的实施方式中,在可动体82设有磁体83、84,在壳体7设有线圈磁心部85、86,但并不限定于此,也可以相反。也就是说,也可以在可动体82设有线圈磁心部85、86,在壳体7设有磁体83、84。并且,也可以将磁体83、84置换为电磁铁。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1