一种液压机能量回收系统的制作方法
1.本实用新型涉及液压系统领域,特别是涉及一种液压机能量回收系统。
背景技术:
2.随着工业的不断发展,液压机已经广泛的存在于社会的各种场合,来满足工业生产的需要。液压机是一种利用液体压力来传递能量,以实现各种压力加工工艺的机床。液压机在金属加工及非金属成形方面的应用越来越广泛,在机床行业中占有的份额正在大幅度攀升,并且随着环保、节能的倡导,节能液压机便成为了一种发展趋势。现有节能液压机控制系统多采用调速、调压的方式来减少能量损失,经常采用的方法是在系统中增加比例压力阀和比例流量阀,采用比例压力阀调压和变频器控制电机转速从而调节液压流速度;而对于液压系统卸载阶段释放的能量往往未能进行合理地回收,尤其对于装载和卸载比较频繁的场合,能量的浪费比较严重。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种液压机能量回收系统,该系统将液压机下降过程中产生的重力势能转化为飞轮的机械能储存起来,当在液压机在复位过程中,改变二次元件的工况可以实现能量的回收,从而使得液压系统可以达到一个较好的能量回收效率,提高系统能量利用效率。
4.为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种液压机能量回收系统,包括第一供油单元、第二供油单元、三位四通换向阀、单向阀、液压缸、二位二通换向阀、二次元件泵马达、变量控制缸、电液伺服阀和控制器,所述第一供油单元的出油端与三位四通换向阀的p油口连接,所述三位四通换向阀的a油口与单向阀的进油口连接,三位四通换向阀的b油口与液压缸的回程进油口连接,所述单向阀的出油口与液压缸的进程进油口连接,所述液压缸的活塞杆端固定连接有载物台;
5.所述二位二通换向阀的p油口与液压缸的进程进油口连接,二位二通换向阀的t 油口与二次元件泵马达的进油口连接,所述二次元件泵马达的轴端固定连接有飞轮;
6.所述变量控制缸的活塞杆端与二次元件泵马达的斜盘相连接,变量控制缸的进程进油口与电液伺服阀的b油口连接,变量控制缸的回程进油口与电液伺服阀的a油口连接,电液伺服阀的p油口与第二供油单元的出油端连接;
7.所述三位四通换向阀、二位二通换向阀和电液伺服阀分别与控制器的输出端电连接。
8.进一步的,所述第一供油单元包括第一发动机、变量泵、油箱和第一溢流阀,所述变量泵的输入轴与第一发动机的输出轴传动连接,变量泵的进油端与油箱连接,变量泵的出油端分别与三位四通换向阀的p油口和第一溢流阀的进油端连接,第一溢流阀的出油端与油箱连接。
9.进一步的,所述第二供油单元包括第二发动机、定量泵、油箱和第二溢流阀,所述
定量泵的输入轴与第二发动机的输出轴传动连接,定量泵的进油端与油箱连接,变量泵的出油端分别与电液伺服阀的p油口和第二溢流阀的进油端连接,第二溢流阀的出油端与油箱连接。
10.进一步的,所述三位四通换向阀的t油口、电液伺服阀的t油口和二次元件泵马达的出油口分别与油箱连接。
11.进一步的,所述电液伺服阀为三位四通电液换向阀。
12.进一步的,所述液压缸的活塞杆端固定设置有第一位移传感器,变量控制缸的活塞杆端固定设置有第二位移传感器,所述第一位移传感器和第二位移传感器分别与控制器的输入端电连接。
13.与现有技术相比较,本实用新型的有益效果如下:本实用新型通过设置二次元件泵马达和飞轮,将系统将液压机下降过程中产生的重力势能转化为飞轮的机械能储存起来,从而实现能量的回收;当在液压机在复位过程中,通过改变二次元件泵马达的工况,可以实现飞轮的机械能转化为液压能,从而实现回收能量的再利用,从而使得液压系统可以达到一个较好的能量回收效率,提高系统能量利用效率。
附图说明
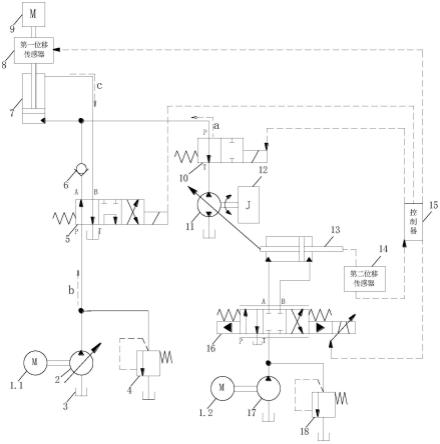
14.图1为能量回收过程中的油路控制状态示意图;
15.图2为液压机处于锁死状态时的油路控制状态示意图;
16.图3为二次元件泵马达由马达工况切换为泵工况过程中油路控制状态示意图;
17.图4为飞轮释放能量单独驱动液压机复位过程中的油路控制状态示意图;
18.图5为第一供油单元和飞轮共同驱动液压机复位过程中的油路控制状态示意图。
19.图中:1.1第一发动机、1.2第二发动机、2变量泵、3油箱、4第一溢流阀、5三位四通换向阀、6单向阀、7液压缸、8、第一位移传感器、9重物、10二位二通换向阀、 11二次元件泵马达、12飞轮、13变量控制缸、14第二位移传感器、15控制器、16电液伺服阀、17定量泵、18第二溢流阀。
具体实施方式
20.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
21.请参阅图1至图5,一种液压机能量回收系统,包括第一供油单元、第二供油单元、三位四通换向阀5、单向阀6、液压缸7、二位二通换向阀10、二次元件泵马达11、变量控制缸13、电液伺服阀16和控制器15。第一供油单元包括第一发动机1.1、变量泵 2、油箱3和第一溢流阀4,变量泵2的输入轴与第一发动机1.1的输出轴通过联轴器传动连接,变量泵2的进油端与油箱3连接,变量泵2的出油端分别与三位四通换向阀5 的p油口和第一溢流阀4的进油端连接,第一溢流阀4的出油端与油箱3连接。第一发动机1.1为变量泵2提供动力,从而驱动变量泵2将油箱3内的液压油送入三位四通换向阀5的p油口。第一溢流阀4用于限制变量泵2的最高工作压力。
22.三位四通换向阀5用于控制液压缸7的进程和回程运动。三位四通换向阀5的a 油
口与单向阀6的进油口连接,三位四通换向阀5的b油口与液压缸7的回程进油口连接,三位四通换向阀5的t油口与油箱3连接。单向阀6的出油口与液压缸7的进程进油口连接,液压缸7的活塞杆端固定连接有载物台9。当三位四通换向阀5工作在其中位时,p油口、t油口、a油口和b油口均处于截止状态,高于限制压力的油液经第一溢流阀4回流至油箱3内;当三位四通换向阀5工作在其右位时,p油口和b油口连通、t油口和a油口连通,变量泵2输出的油液经三位四通换向阀5的b油口进入液压缸7的回程进油口,由于a油口处设置有单向阀6,则液压缸7内的进程端油液无法经过三位四通换向阀5的a油口回流至油箱3;当三位四通换向阀5工作在其左位时, p油口和a油口连通、t油口和b油口连通,变量泵2输出的油液经三位四通换向阀5 的a油口进入液压缸7的进程进油口,液压缸7内的进程端油液经过三位四通换向阀5 的b油口回流至油箱3。液压缸7的活塞杆端固定设置有第一位移传感器8,用于监测液压缸7的进程和回程到位情况。
23.第二供油单元包括第二发动机1.2、定量泵17、油箱3和第二溢流阀18,定量泵 17的输入轴与第二发动机1.2的输出轴通过联轴器传动连接,定量泵17的进油端与油箱3连接,定量泵17的出油端分别与电液伺服阀16的p油口和第二溢流阀18的进油端连接,第二溢流阀18的出油端与油箱3连接。第二发动机1.2为定量泵17提供动力,从而驱动定量泵17将油箱3内的液压油送入电液伺服阀16的p油口。第二溢流阀18 用于限制定量泵17的最高工作压力。
24.本实施例中,电液伺服阀16采用三位四通电液换向阀,用于控制变量控制缸13 的进程和回程运动。变量控制缸13的进程进油口与电液伺服阀16的b油口连接,变量控制缸13的回程进油口与电液伺服阀16的a油口连接,电液伺服阀16的p油口与定量泵17的出油端连接,电液伺服阀16的t油口与油箱3连接。当电液伺服阀16工作在其左位时,其p油口和a油口连通、t油口和b油口连通,由定量泵17输出的油液经电液伺服阀16的a油口进入变量控制缸13左侧的进程进油口,推动其活塞杆向右移动,变量控制缸13右侧的油液经电液伺服阀16的b油口回流至油箱3内;当电液伺服阀16工作在其中位时,p由口、t油口、a油口和b油口均处于截止状态,高于限制压力的油液经第二溢流阀18回流至油箱3内;当电液伺服阀16工作在其右位时,其p油口和b油口连通、t油口和a油口连通,由定量泵17输出的油液经电液伺服阀 16的b油口进入变量控制缸13右侧的回程进油口,推动其活塞杆向左移动。
25.变量控制缸13的活塞杆端与二次元件泵马达11的斜盘相连接,当变量控制缸13 的活塞杆向左或向右运动时,会带动二次元件泵马达11斜盘倾角的改变,当变量控制缸13的活塞杆向左运动到预设位置时,二次元件泵马达11切换至马达工况,当变量控制缸13的活塞杆向右运动到预设位置时,二次元件泵马达11切换至泵工况,从而实现能量的吸收或输出的功能切换。二次元件泵马达11的轴端固定连接有飞轮12,用于存储二次元件泵马达11在马达工况下吸收的能量,以及释放能量并经泵工况下的二次元件泵马达11输出。二次元件泵马达11的出油口与油箱3连接,流入二次元件泵马达 11内的高压液压油的能量部分转化为飞轮12的机械能后,低压状态的液压油回流至油箱3中。
26.二位二通换向阀10的p油口与液压缸7的进程进油口连接,二位二通换向阀10 的t油口与二次元件泵马达11的进油口连接。当二位二通换向阀10工作在其左位时,其p油口和t油口连通,则经液压缸7进程端输出的液压油经过二位二通换向阀10的 p油口送入二次元件泵马达11中,进而完成能量回收的过程,或者飞轮12释放能量过程中,二次元件泵马达11
输出液压油进入液压缸7的回程进油口,进而完成能量二次利用。变量控制缸13的活塞杆端固定设置有第二位移传感器14,用于监测变量控制缸13的进程和回程到位情况。
27.三位四通换向阀5、二位二通换向阀10和电液伺服阀16分别与控制器15的输出端电连接,第一位移传感器8和第二位移传感器14分别与控制器15的输入端电连接。控制器15用于处理各个电磁阀和位移传感器的输入输出信号,以实现液压机能量的输出控制,从而完成执行端的对应机械动作。
28.以液压机为例来详细阐述该能量回收系统的工作过程,整个工作过程分为下降、锁死、上升三个阶段,具体工作过程如下:
29.(1)当液压机开始工作时,此时需要完成下降动作。如图1所示,当液压机下降时,控制器15将电信号传递给电液伺服阀16,使得电液伺服阀16处于右位,第二发动机1.2带动定量泵17工作。油液从定量泵17经过电液伺服阀16的右位,进入变量控制缸13的右腔,推动变量控制缸13的活塞杆向左运动,同时变量控制缸13活塞杆一端连接的位移传感器14检测变量控制缸13活塞杆的移动量,从而使得二次元件泵马达11处于马达的工况下。定量泵17输出的油液的流动路线如图1中空心箭头所示的“a-b”路线。控制器15将信号传递给三位四通换向阀5和二位二通换向阀10,使得三位四通换向阀5处于右位、二位二通换向阀10处于左位;第一发动机1.1驱动变量泵2工作,油液从变量泵2的出口,到达三位四通换向阀5的右端,进入液压缸7的有杆腔,液压缸7无杆腔的油液经过二位二通换向阀10的左位,进入二次元件泵马达11 在马达工况下的进油口,带动二次元件泵马达11旋转,将二次元件泵马达11旋转产生的能量储存到飞轮12中,从而实现能量的回收。变量泵2输出的油液的流动路线如图 1中空心箭头所示的“c-d-e-f”路线。
30.(2)当液压缸7一端的第一位移传感器8检测设置的位置时,位移传感器将信号传递给控制器15,控制器15将电信号传递给三位四通换向阀5、二位二通换向阀10,使得三位四通换向阀5处于中位、二位二通换向阀10处于右位,液压机处于锁死状态,如图2所示。
31.(3)当液压机需要完成复位时,此时需要完成上升动作。此时需要将飞轮12中储存的能量进行释放,实现回收能量的再次利用,从而提升能量的利用效率。首先,控制器15将电信号传递给电液伺服阀16,使电液伺服阀16处于其左位,此时其p油口与 a油口连通、t油口和b油口连通。油液从定量泵17的出口流出,经过电液伺服阀16 的左位,进入变量控制缸13的左腔,推动变量控制缸13活塞杆反向(向右)运动,定量泵17输出的油液的流动路线如图3中空心箭头所示的“a-b”路线。
32.变量控制缸13活塞杆一端的第二位移传感器14将检测到的信号传递给控制器15,当变量控制缸13的活塞杆运动至使得二次元件泵马达11处于泵工况下时,控制器15 将电信号传递给电液伺服阀16,使得电液伺服阀16处于中位,此时二次元件泵马达11 一直处于泵的工况下,如图4所示。当二次元件泵马达11处于泵工况下时,飞轮12 需要将储存的能量释放,因此控制器15将电信号传递给二位二通换向阀10,使得二位二通换向阀10和三位四通换向阀5均处于其左位,则二位二通换向阀10的p油口和a 油口连通,油液从二次元件泵马达11泵工况下的出油口供出,经过二位二通换向阀10 的左位,进入液压缸7的进程进油口,对活塞杆产生向上的推力,液压缸7有杆腔内的油液则由回程进油口送入三位四通换向阀5的左位,进而回流至油箱3中。二次元件泵马达11泵工况下的输出的油液流动路线如图4中空心箭头所示的“a-b”路线。
33.当液压缸7无杆腔的压力大于有杆腔的压力,且压力差大于液压缸7顶部的载物台 9的重力时,飞轮12释放的能量可以满足液压机的复位需要;当液压缸7无杆腔的压力小于有杆腔的压力时,或液压缸7无杆腔的压力虽大于有杆腔的压力,但压力差不大于液压缸7顶部的载物台9的重力时,飞轮12释放的能量无法推动液压机横梁复位,此时控制器15将电信号传递给三位四通换向阀5,使得三位四通换向阀处于其左位,此时其p油口和a油口连通、t油口和b油口连通,油液从变量泵2供出,流入三位四通换向阀5的左位,经过单向阀6,最终进入液压缸7的进程进油口,和飞轮12释放的能量一起推动液压机复位。二次元件泵马达11泵工况下的输出的油液流动路线如图5中空心箭头所示的“a-c”路线,变量泵2输出的油液的流动路线如图5中空心箭头所示的“b-c”路线。
34.在液压缸7向上运动时,第一位移传感器8不断检测液压缸7活塞杆的位移,当液压缸7运动到位移上限时,第一位移传感器8将信号传递给控制器15,控制器15处理完信号后,将信号传递给三位四通换向阀5和二位二通换向阀10,使得三位四通换向阀5处于中位,二位二通换向阀10处于右位完成复位动作。
35.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1