缓冲块、缓冲块刚度控制方法以及汽车悬架系统与流程
1.本技术涉及汽车技术领域,尤其涉及一种缓冲块、缓冲块刚度控制方法以及汽车悬架系统。
背景技术:
2.随着汽车技术的发展,在最初使用汽车作为代步工具的基础上,对汽车的舒适性提出了更高的要求,衡量汽车舒适性非常重要的一个指标为减震性能。减震性能良好的汽车,司乘人员几乎感受不到路面不平整带来的颠簸感;相应的,减震性能较差的汽车,司乘人员的颠簸感会比较明显,舒适感较差。
3.为了使得汽车减震性能良好,一般汽车都配置悬架系统,该悬架系统多由弹性元件、导向机构和减震器等部件构成,汽车行驶过程中,路面不平整导致的震动力会被传递至弹性元件和减震器,弹性元件和减震器会缓冲掉该震动力,从而缓和由不平路面传给车架的冲击,以提高司乘人员的舒适性。
4.一般情况下,减震器中均需要配置缓冲块,该缓冲块主要起到缓解车架的冲击力的作用,然而,目前的缓冲块其刚度固定,无论面对何种驾驶状况,其刚度都不会发生变化,在汽车的极限驾驶状态下,司乘人员还是会受到比较强烈的冲击力,乘坐舒适性较低。
技术实现要素:
5.本技术的目的在于提供一种缓冲块、缓冲块刚度控制方法以及汽车悬架系统,该缓冲块的刚度可调,由此实现不同驾驶状况匹配不同的缓冲块刚度,从而降低极限驾驶状态下司乘人员受到的冲击力,增加司乘人员乘坐的舒适性。
6.本技术第一方面提供一种缓冲块,包括:缓冲本体和多个电磁线圈;缓冲本体内设置有沿缓冲本体的轴向设置的多个环形空腔,多个电磁线圈一一对应地设置在多个环形空腔内,电磁线圈通电产生电磁场,其中任一个电磁线圈至少位于其余一个所述电磁线圈通电产生的电磁场内。该缓冲块,通过在缓冲本体内设置多个电磁线圈,利用电磁线圈通电后能够在电磁场受力的特性,从而改变缓冲本体的刚度。使得汽车在不同的极限驾驶状态下,缓冲本体的刚度可以有所不同,以降低司乘人员在各种驾驶状态下受到的冲击力,提升了舒适性。
7.可选的,沿缓冲本体的轴向,任意相邻的两个电磁线圈通电受到的电磁场力方向相反。
8.可选的,任意相邻的两个电磁线圈的通电后的电流方向相反。
9.可选的,缓冲本体包括多个沿轴向依次连接的缓冲单体块,多个环形空腔分别形成在多个缓冲单体块上。
10.可选的,缓冲单体块上形成有环形凸出部,环形空腔形成在环形凸出部上。
11.可选的,在缓冲块的轴向上,多个缓冲单体块的径向尺寸逐渐增大。
12.本技术第二方面提供一种缓冲块刚度控制方法,缓冲块为本技术第一方面中任一
项的缓冲块;该缓冲块用于汽车上。其中,缓冲块刚度控制方法包括:车身稳定系统采集汽车的侧向加速度和纵向加速度后,将侧向加速度和纵向加速度发送至控制模块;控制模块接收到侧向加速度和纵向加速度后,根据侧向加速度和纵向加速度控制电源模块提供给电磁线圈的电流。
13.可选的,汽车的四个车轮的悬架模块分别设有缓冲块,根据侧向加速度和纵向加速度控制电源模块提供给电磁线圈的电流包括:在纵向加速度为负值且绝对值增大的情况下,控制电源模块提供给位于汽车前部的电磁线圈的电流增大;在纵向加速度为正值且增大的情况下,控制电源模块提供给位于汽车后部的电磁线圈的电流增大。
14.可选的,汽车的四个车轮的悬架模块分别设有缓冲块;根据侧向加速度和纵向加速度控制电源模块提供给电磁线圈的电流包括:在汽车向第一侧转弯,且侧向加速度增大的情况下,控制电源模块提供给位于第二侧的缓冲块的电磁线圈的电流增大;其中,第一侧为右侧,第二侧为左侧;或者,第一侧为左侧,第二侧为右侧。
15.本技术第三方面提供一种汽车悬架系统,包括本技术第一方面中任一项缓冲块。
附图说明
16.为了更清楚地说明本技术的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。
17.图1是本技术一种实施方式提供的缓冲块的轴测图;
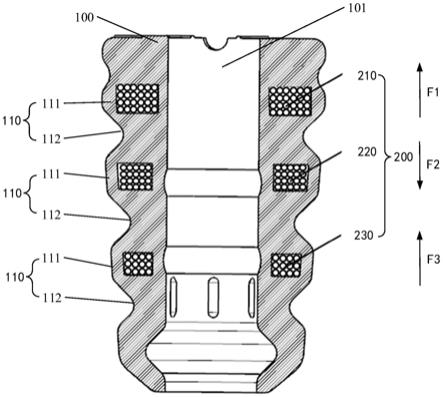
18.图2是本技术一种实施方式提供的缓冲块的剖视图;
19.图3是本技术另一种实施方式提供的缓冲块的剖视图;
20.图4是本技术一种实施方式提供的缓冲块刚度控制方法流程图;
21.图5是本技术一种实施方式提供的缓冲块刚度控制方法所用硬件模块结构框图;
22.图6是本技术一种实施方式提供的汽车悬架系统的轴测图。
23.附图标记说明:
24.缓冲块1000,缓冲本体100,轴向通孔101,缓冲单体块110,环形凸出部111,环形凹陷部112,电磁线圈200,第一电磁线圈210,第二电磁线圈220,第三电磁线圈230,车身稳定系统400,控制模块410,电源模块420,汽车悬架系统2000,减震器筒2100,弹簧2200,活塞杆2300,支撑架2400。
具体实施方式
25.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。需要强调的是,本技术实施方式中,多个意指两个及两个以上。
26.请参考图1和图2,在一种实施方式中,本技术提供一种缓冲块1000,该缓冲块1000具体包括:缓冲本体100和多个电磁线圈200。
27.其中,缓冲本体100内设置有沿缓冲本体100的轴向设置的多个环形空腔,多个电磁线圈200一一对应地设置在多个环形空腔内,电磁线圈200通电产生电磁场,其中任一个电磁线圈200至少位于其余一个电磁线圈200通电产生的电磁场内。
28.详细的,缓冲块1000呈柱状,包括第一底壁、第二底壁和周壁,第一底壁和第二底壁设置于周壁相对的两端。可以理解的是,缓冲本体100能够伸缩,具体的,缓冲本体100伸
长后,其第一底壁和第二底壁之间的距离增大,缓冲本体100缩短后,其第一底壁和第二底壁之间的距离减小。缓冲本体100伸长和缩短依靠缓冲本体100自身的弹性力。可以理解的是,缓冲本体100可以采用橡胶制成,由此使得缓冲本体100既具有足够的弹性力,成本又比较低。
29.该缓冲块1000注塑成型,在缓冲块1000注塑成型之前,预先将电磁线圈200放置于注塑模具内,然后再冲压成型缓冲块1000,由此使得电磁线圈200设置在环形空腔内。
30.该实施方式中,通过在缓冲本体100内设置多个电磁线圈200,利用电磁线圈200通电后能够在电磁场受力的特性,从而改变缓冲本体100的刚度。使得汽车在不同的极限驾驶状态下,缓冲本体100的刚度可以有所不同,以降低司乘人员在各种驾驶状态下受到的冲击力,提升了舒适性。
31.在一种可选实施方式中,沿缓冲本体100的轴向,任意相邻的两个电磁线圈200通电受到的电磁场力方向相反。以包括两个电磁线圈200为例,该两个电磁线圈200分别为第一电磁线圈210和第二电磁线圈220,那么,第一电磁线圈210通电后产生第一电磁场,第二电磁线圈220通电后产生第二电磁场,第一电磁线圈210位于第二电磁场的范围内,并受到第一电磁力f1,第二电磁线圈220位于第一电磁场的范围内并受到第二电磁力f2,第一电磁力f1和第二电磁力f2的方向相反。该两个电磁线圈200受到相反的电磁力,该相反的电磁力可以支撑缓冲本体100,以使缓冲本体100拉伸,由此提高缓冲本体100的刚度。
32.在一种可选实施方式中,任意相邻的两个电磁线圈200受到方向相反的电磁力可以通过以下方式实现:任意相邻的两个电磁线圈200的通电后的电流方向相反。也即,上述第一电磁线圈210受到的第一电磁力f1和第二电磁线圈220受到的第二电磁力f2方向相反可以通过以下方式实现,具体的,第一电磁线圈210由第一导线呈螺旋状缠绕而成,第二电磁线圈220由第二导线呈螺旋状缠绕而成;其中,第一导线的末端靠近第二导线的起始端。那么,请参考图3,当第一导线的缠绕方向由图3中的右端开始向图3中的左端延伸,且第一导线的起始端与电源正极连接,第一导线的末端与电源负极连接,也就是右侧的部分第一电磁线圈210通电后的电流方向垂直于纸面向里,左侧的部分第一电磁线圈210通电后的电流方向垂直于纸面向外;而第二导线的位于右侧的部分与电源负极连接,第二导线的位于左侧的部分连接电源正极,也就是说,图3中的右侧的部分第二电磁线圈220通电后的电流方向垂直于纸面向外,图3中的左侧的部分第二电磁线圈220通电后的电流方向垂直于纸面向里;由此根据右手定则和左手定则,第一电磁线圈210受到的第一电磁力f1方向朝上,第二电磁线圈220受到的第二电磁力f2方向朝下。
33.在其他图未示的实施例中,右侧的部分第一电磁线圈210通电后的电流方向垂直于纸面向外,左侧的部分第一电磁线圈210通电后的电流方向垂直于纸面向里,右侧的部分第二电磁线圈220通电后的电流方向垂直于纸面向里,左侧的部分第二电磁线圈220通电后的电流方向垂直于纸面向外,由此,根据右手定则(判断通电后的电磁线圈产生的磁场方向)和左手定则(判断通电线圈在磁场中受到的力的方向),第一电磁线圈210受到的第一电磁力f1方向朝下,第二电磁线圈220受到的第二电磁力f2方向朝上。
34.无论上述哪种连接方式,第一电磁力f1和第二电磁力f2方向总是相反,那么第一电磁力f1和第二电磁力f2作用于缓冲本体100时,起到支撑缓冲本体100的作用,此时缓冲本体100的刚度增加,缓冲本体100也随之被拉伸;当然,如果提供给第一电磁线圈210和第
二电磁线圈220的电流增大,则第一电磁力f1和第二电磁力f2也随之增加,那么缓冲本体100的刚度随之增加;如果提供给第一电磁线圈210和第二电磁线圈220的电流减小,则第一电磁力f1和第二电磁力f2随之减小,那么缓冲本体100的刚度随之降低。当第一电磁线圈210和第二电磁线圈220不通电的情况下,第一电磁力f1和第二电磁力f2消失,缓冲本体100的刚度恢复为原始状态。
35.那么汽车在极限驾驶状态下,可以通过控制是否提供给第一电磁线圈210和第二电磁线圈220电流,以及控制提供的电流大小,来调整缓冲本体100的刚度,从而降低极限驾驶状态下司乘人员受到的冲击力,增加司乘人员乘坐的舒适性。具体的,极限驾驶状态包括紧急制动、紧急直线加速和转弯灯。
36.在一种可选实施方式中,缓冲本体100包括多个沿轴向依次连接的缓冲单体块110,多个环形空腔分别形成在多个缓冲单体块110上。那么继续以包括第一电磁线圈210和第二电磁线圈220为例,缓冲本体100则对应的包括第一缓冲单体块和第二缓冲单体块,其中第一缓冲单体块上设置第一环形空腔,第二缓冲单体块上设置有第二环形空腔,然后第一电磁线圈210设置于第一环形空腔内,第二电磁线圈220设置于第二环形空腔内。该种结构的缓冲本体100结构简单,易于加工,并且便于设置电磁线圈200,从而可以加快生产节拍,降低成本。
37.当然,本领域技术人员可以理解的是,也可以设置包括第三电磁线圈230,那么相应的包括第三缓冲单体块110,第三缓冲单体块110上设置第三环形空腔,第第三电磁线圈230设置于第三环形空腔内。
38.具体的,第三电磁线圈230通电后受到第三电磁力f3,第三电磁力f3和第二电磁力f2的方向相反。那么,此时,第一电磁力f1和第二电磁力f2相互作用,可以改变第一电磁线圈210和第二电磁线圈220之间的部分缓冲块1000的刚度。而第二电磁力f2和第三电磁力f3相互作用,可以改变第二电磁线圈220和第第三电磁线圈230之间的部分缓冲块1000的刚度。由此使得缓冲本体100的整个长度方向上刚度均可以调整,以增加汽车稳定性和舒适性。
39.也即,缓冲本体100上可以设置两个电磁线圈200,也可以设置三个电磁线圈200,当然,也可以设置四个、五个或者六个等等数量的电磁线圈200,具体数量可以根据缓冲本体100的长度设置。无论设置多少电磁线圈200,任意相邻的两个电磁线圈200之间的电磁力均相反。从而使得相邻的电磁线圈200二者之间的部分缓冲块1000的刚度。
40.在一种可选实施方式中,缓冲单体块110上形成有环形凸出部111,环形空腔形成在环形凸出部111上,也即电磁线圈200设置在环形凸出部111上。通过设置环形凸出部111,可以更好的容纳电磁线圈200,降低缓冲单体块110侧壁太薄导致电磁线圈200裸露的风险,增加安全系数。
41.具体的,缓冲单体块110还可以和环形凸出部111连接的环形凹陷部112,那么在相邻的电磁线圈200受到相反的电磁力的情况下,夹在两个环形凸出部111之间的环形凹陷部112被拉伸,由此使得缓冲块1000的刚度增加。当电磁线圈200未通电时,夹在两个环形凸出部111之间的环形凹陷部112收缩;由此使得缓冲块1000的刚度更易调整。
42.在一种可选实施方式中,在缓冲块1000的轴向上,多个缓冲单体块110的径向尺寸逐渐增大。也即上述第一缓冲单体块的径向尺寸大于第二缓冲单体块的径向尺寸。由此使
得在不影响缓冲块1000的弹性的前提下,使得缓冲块1000易于安装,且重量较轻。
43.本技术实施方式还提供一种缓冲块1000的刚度控制方法,在陈述该刚度控制方法之前,首先以包括两个电磁线圈200为例,陈述对应的刚度控制系统。请参考图5,以下详述本技术实施例提供的缓冲块1000的刚度控制系统,该刚度控制系统包括电源模块420、车身稳定系统400和控制模块410,该控制模块410可以为整车控制器。其中,电源模块420分别和控制模块410、车身稳定系统400、电磁线圈200连接,控制模块410还与车身稳定系统400连接。具体的,电源模块420为控制模块410、车身稳定系统400、电磁线圈200提供电能,车身稳定系统410采集汽车的纵向加速度和侧向加速度等信息,控制模块410获取车身稳定系统400采集的纵向加速度和侧向加速度等信息。
44.基于以上控制系统,请参考图4,详述本技术实施方式提供的缓冲块1000的刚度控制方法,其具体控制过程为:
45.步骤s1:车身稳定系统400采集汽车的侧向加速度和纵向加速度后,将侧向加速度和纵向加速度发送至控制模块410。其中,控制模块410可以为整车控制器。
46.步骤s2:控制模块410接收到侧向加速度和纵向加速度后,根据侧向加速度和纵向加速度控制电源模块420提供给电磁线圈200的电流。
47.详细的,以汽车的四个车轮的悬架模块分别设有缓冲块1000,且每个缓冲块1000包括两个电磁线圈200,两个电磁线圈200分别为第一电磁线圈210和第二电磁线圈220为例。当汽车紧急制动或者紧急加速时,车辆稳定系统将纵向加速度传输至整车控制器,整车控制器接收到该纵向加速度后,根据该纵向加速度的大小,确定是否需要为第一电磁线圈210和第二电磁线圈220提供电流,如果需要提供,则电流具体为多大。因制动时,纵向加速度为负值,因此以纵向加速度的绝对值的大小调整电流。
48.详细的,例如汽车紧急制动的情况下,汽车的速度在5s(秒)内从40km/h(千米每小时)降低至0km/h,此时,纵向加速度绝对值为|(0-40*/3600)|/5=2.22m/s2。而当汽车的速度在5s内从60km/h降低至0km/h,此时,纵向加速度绝对值为|(0-60*/3600)|/5=3.33m/s2。当汽车的速度在5s内从km/h降低至0km/h,此时,纵向加速度绝对值为|(0-*/3600)|/5=5.55m/s2。
49.紧急制动时,在纵向加速度不同的情况下,提供给位于汽车前部的两个缓冲块1000内的第一电磁线圈210和第二电磁线圈220的电流也不相同,具体根据纵向加速度的大小,可以预先设置好紧急制动时,纵向加速度和电流值的对应关系。例如,可以设置纵向加速度的绝对值为0-2.5m/s2之间时,控制提供的电流为0;当纵向加速度的绝对值为2.5m/s
2-3.5m/s2之间时,控制提供的电流为10a;当纵向加速度的绝对值大于3.5m/s2时,控制提供的电流为20a。那么,上述几种情况下,也即,当纵向加速度为2.22m/s2时,可以控制提供的电流为0;当纵向加速度为3.33m/s2时,可以控制提供的电流为10a(安);当纵向加速度为5.55m/s2时,可以控制提供的电流20a。也即,紧急制动情况下,在纵向加速度为负值且绝对值增大的情况下,控制电源模块420提供给位于汽车前部的第一电磁线圈210的电流和第二电磁线圈220的电流增大。由此,在紧急制动情况下,使得第一电磁力f1和第二电磁力f2增加,则缓冲本体100的刚度相应增加,改善因紧急制动而产生的点头现象,提高了汽车紧急制动情况下的稳定性能和司乘人员的舒适性。
50.而在汽车紧急加速的情况下,汽车的速度在5s内从0km/h增加至40km/h,此时,纵
向加速度为(40*/3600-0)/5=2.22m/s2。汽车的速度在5s内从0km/h增加至60km/h,此时纵向加速度为(60*/3600-0)/5=3.33m/s2。汽车的速度5s内从0增至km/h,此时纵向加速度为(*/3600-0)/5=5.55m/s2。
51.紧急加速时,在纵向加速度不同的情况下,提供给位于汽车后部的两个缓冲块1000内的第一电磁线圈210和第二电磁线圈220的电流也不尽相同,具体根据纵向加速度的大小,可以预先设置好紧急制动时,纵向加速度和电流值的对应关系。例如,可以设置纵向加速度为大于3.5m/s2时,控制提供的电流为20a;当纵向加速度为2.5m/s
2-3.5m/s2之间时,控制提供的电流为10a;当纵向加速度为0-2.5m/s2时,控制提供的电流为0a。那么,上述几种情况下,也即,在紧急加速情况下,当纵向加速度为5.55m/s2时,可以控制提供的电流为20a;当纵向加速度为3.33m/s2时,可以控制提供的电流为10a;当纵向加速度为2.22m/s2时,可以控制提供的电流5a。也即,紧急加速情况下,在纵向加速度为正值且增大的情况下,控制电源模块420提供给位于汽车后部的第一电磁线圈210和第二电磁线圈220的电流增大。由此,使得第一电磁力f1和第二电磁力f2增大,缓冲本体100的刚度相应增大,从而改善因紧急加速而产生的抬头现象,提高了紧急加速情况下的汽车稳定性能和司乘人员舒适性。
52.除了紧急制动和紧急加速之外,汽车转弯也是极限驾驶的一种情况,具体的,在汽车向左转弯的情况下,车身会向右侧倾,此时,整车控制器可以控制电源模块420提供给右侧缓冲块1000的第一电磁线圈210和第二电磁线圈220的电流增大,由此增大作用于右侧缓冲块1000上的第一电磁力f1和第二电磁力f2,使得右侧缓冲块1000的刚度增加,从而为汽车的右侧提供足够的支撑,提高汽车左转弯时的稳定性。在汽车右转弯的情况下,车身会向左侧倾,此时整车控制器可以控制电源模块420提供给左侧缓冲块1000的第一电磁线圈210和第二电磁线圈220的电流增大,由此增大作用于左侧缓冲块1000上的第一电磁力f1和第二电磁力f2,使得左侧缓冲块1000的刚度增加,从而为汽车的左侧提供足够的支撑,提高汽车右转弯时的稳定性。
53.也即,可以在汽车的四个车轮的悬架模块分别设有缓冲块1000。那么,在汽车向第一侧转弯,且侧向加速度增大的情况下,控制电源模块420提供给位于第二侧的缓冲块1000的第一电磁线圈210的电流和第二电磁线圈220的电流增大。其中,第一侧为右侧,第二侧为左侧;或者,第一侧为左侧,第二侧为右侧。
54.当然,本领域技术人员可以理解的是,电磁力大小根据以下公式计算:b=μnι,其中b为电磁力,μ为真空中的磁导率,n为线圈匝数,i为电流。可见,电磁力的大小和线圈匝数相关,因此提供给第一电磁线圈210和第二电磁线圈220电流时,需要综合考虑各自的线圈匝数,如果第一电磁线圈210的匝数大于第二电磁线圈220匝数,那么当需要第一电磁力f1和第二电磁力f2相等时,则提供给第一线磁线圈的电流应当小于提供给第二电磁线圈220的电流。
55.另外,请参考图6,本技术一种实施方式还提供一种汽车悬架系统2000,包括本技术任意实施方式中的缓冲块1000。除了包括缓冲块1000之外,该实施方式中提供的汽车悬架系统2000还可以包括减震器筒2100、活塞杆2300、弹簧2200和支撑架2400。其中,活塞杆2300连接在减震器筒2100的腔室内,可以做活塞运动;缓冲块1000通过其轴向通孔101套设在活塞杆2300远离减震器筒2100的一端;弹簧2200的一端绕在减震器筒2100的外壁上,另一端绕在缓冲块1000的顶端;支撑架2400和缓冲块1000的顶端固定连接。上述的汽车悬架
系统2000安装在汽车上的方式如下:减震器筒2200远离缓冲块1000的一端连接在车架上,支撑架2400连接在悬架上。
56.其中,在经过不平路面时,弹簧2200和缓冲块1000主要用于缓冲路面不平整带来的冲击力,弹簧2200过滤路面的震动后,弹簧2200自身可能还会有往复运动,减震器筒2200和活塞杆2300相配合可以抑制此种情况下弹簧2200的跳跃,由此提升汽车的稳定性和舒适性。
57.以上对本技术实施例进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明可以用于帮助理解本技术的方法及其核心思想。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1