固定式等速万向联轴器的制作方法
1.本发明涉及固定式等速万向联轴器。
背景技术:
2.构成机动车、各种工业机械的动力传递系统的等速万向联轴器能够将驱动侧与从动侧的两轴以能够传递转矩的方式连结,并且即使所述两轴取得工作角也能够等速地传递旋转转矩。等速万向联轴器大致分为仅允许角度位移的固定式等速万向联轴器与允许角度位移以及轴向位移这两方的滑动式等速万向联轴器,例如,在从机动车的发动机向驱动车轮传递动力的驱动轴中,在差速器侧(机内侧)使用滑动式等速万向联轴器,在驱动车轮侧(机外侧)使用固定式等速万向联轴器。
3.作为机动车的驱动轴用的固定式等速万向联轴器所谋求的功能,重要的是与车轮的转向轮相匹配的高的工作角、以及伴随于此的高工作角时的强度。以往,对于最大工作角,通常在球笼型等速万向联轴器(bj型)为47
°
,在免根切型等速万向联轴器(uj型)为50
°
,但从机动车的回转性的提升、转小弯性的提升的观点出发,超过50
°
的要求不断增加。为了响应这些要求,提出了各种结构的固定式等速万向联轴器。
4.在固定式等速万向联轴器中,在以超过以往的工作角50
°
的高工作角使用的情况下,需要缩短外侧联轴器构件的长度,以使中间轴不与外侧联轴器构件发生干涉,但其结果是,外侧联轴器构件的滚道槽变短,相位角0
°
附近的滚珠从滚道槽脱离而失去接触点。作为延长外侧联轴器构件的滚道槽的方案,可以举出将滚珠的节圆直径(pcd)扩大的方案,但导致外侧联轴器构件的外径大径化并且导致重量增加。
5.在专利文献1中,提出了将外侧联轴器构件以及内侧联轴器构件的各自的滚道槽设为圆弧状与锥状的组合从而抑制外径的增加且能够高工作角化的结构的固定式等速万向联轴器。
6.在专利文献2中,在以往型的固定式等速万向联轴器中,通过使在最大工作角时,转矩传递滚珠(以下,简称为滚珠)向外侧联轴器构件的开口侧移动最大的相位角(相位角0
°
)下的滚珠的中心与联轴器中心之间的轴平行距离、和滚珠的中心与外侧联轴器构件的开口圆锥面之间的轴平行距离之比小于2.9,从而在最大工作角时也能够维持功能。并且,在取得工作角而滚珠从外侧联轴器构件的滚道槽突出到失去接触点的情况下,能够通过使所述比小于2.2来维持功能性。另外,作为增大最大工作角的方案,通过设定最大工作角时的滚珠从最外侧联轴器构件的开口侧端部出来的相位(0
°
相位)下的滚珠中心与联轴器中心之间的轴向距离、和滚珠中心与外侧联轴器构件的开口圆锥面之间的轴向距离的比率,能够防止滚珠从保持器以及外侧联轴器构件脱落。
7.在专利文献3中,提出了一种高效率的固定式等速万向联轴器,该固定式等速万向联轴器不是最大工作角设定为超过以往的工作角(50
°
)的角度的固定式等速万向联轴器,但具备如下结构:外侧联轴器构件和内侧联轴器构件的滚道槽的轨道中心线具备圆弧状部分,该圆弧状部分具有相对于联轴器中心o在轴向上没有偏置的曲率中心,该圆弧状的轨道
中心线向周向的相反方向倾斜。
8.现有技术文献
9.专利文献
10.专利文献1:日本特许第4041641号公报
11.专利文献2:日本特许第4885236号公报
12.专利文献3:日本特开2013
‑
104432号公报
技术实现要素:
13.发明要解决的课题
14.在专利文献1的结构中,是抑制外侧联轴器构件的外径的增加的结构,但外侧联轴器构件的滚道槽是朝向外径侧的锥形状,因此为了确保高工作角时的滚珠与滚道槽的接触点而导致外侧联轴器构件的外径变大。
15.在专利文献2的结构中,通过在高工作角时滚珠从外侧联轴器构件的滚道槽突出到失去接触点的情况下与保持器的凹袋内残留接触(保持于保持器的凹袋内),而不使功能受损。但是,明确了在滚珠从外侧联轴器构件的滚道槽突出到失去接触点的情况下,作用于保持器的力的平衡与具有接触点的情况相比受损,因此虽然保持于保持器的凹袋内,但在保持器的强度上并不充分。
16.对于专利文献3的固定式等速万向联轴器,转矩损失以及发热较少且为高效率,但在以超过以往的工作角(50
°
)的高工作角使用的情况下存在未知的问题。关于该问题,如后述那样进行了研究以及验证。
17.鉴于上述那样的问题,本发明的目的在于,提供在最大工作角设定为超过以往的工作角(50
°
)的角度、且为在取得高工作角时滚珠在从外侧联轴器构件出来的相位(相位角0
°
)区域中失去接触点的工作方式的固定式等速万向联轴器中,能够确保等速性、传递效率、耐久性并且能够使保持器的强度提升的固定式等速万向联轴器。
18.用于解决课题的方案
19.本发明人们对前述的问题进行了各种研究和验证,得到了以下的见解和思想,由此实现了本发明。
20.(1)滚珠失去接触点的情况下的联轴器内的力的平衡的破坏
21.在固定式等速万向联轴器中,在以超过以往的工作角(50
°
)的高工作角使用的情况下,如前述那样,外侧联轴器构件的滚道槽变短,相位角0
°
附近的滚珠从滚道槽脱离而失去接触点。并且,在滚珠失去与滚道槽的接触点的相位范围内,会失去滚珠与外侧联轴器构件的滚道槽以及与内侧联轴器构件的滚道槽的接触力、从滚珠作用于保持器的力,从而由其他滚珠承受其载荷,内部的力的平衡破坏。特别是,明确了在滚道槽的曲率中心在轴向上偏置的(以下,也称为轴向滚道偏置型)球笼型等速万向联轴器(bj型)、免根切型等速万向联轴器(uj型)中,等速万向联轴器内的力的平衡较大地破坏。
22.(2)对于联轴器内的力的平衡破坏的考察
23.在轴向滚道偏置型的固定式等速万向联轴器中,外侧联轴器构件的滚道槽的曲率中心相对于联轴器中心o向外侧联轴器构件的开口侧偏置,另一方面,内侧联轴器构件的滚道槽的曲率中心向与外侧联轴器构件的滚道槽的曲率中心相反的方向偏置,滚珠配置于在
外侧联轴器构件的滚道槽与内侧联轴器构件的滚道槽之间形成的向开口侧开放的楔形空间,并被保持器定位。
24.当以常用角程度的小的角度负载转矩时,在外侧联轴器构件的滚道槽与内侧联轴器构件的滚道槽的接触力的分力的作用下,各滚珠向相同的方向按压保持器,因此保持器的球状外周面、球状内周面分别与外侧联轴器构件的球状内周面、内侧联轴器构件的球状外周面强力地接触。在以中角度至高角度负载转矩时,各滚珠与外侧联轴器构件的滚道槽以及与内侧联轴器构件的滚道槽的接触力产生强弱,各滚珠按压保持器的力也产生强弱,因此作用于保持器的力矩的相互平衡也从二等分平面偏移一些。进而,在滚珠失去与外侧联轴器构件的滚道槽的接触点的高工作角下,由于分担载荷的滚珠的数量减少,因此卡挂于保持器的力矩的平衡较大地变化,保持器从二等分平面较大地偏移。考察到,伴随于此,等速性以及传递效率降低,并且保持器的强度有可能大幅降低。
25.(3)着眼点和验证
26.根据上述的考察结果,着眼于从滚珠作用于保持器的力的平衡优异的交叉滚道槽型的固定式等速万向联轴器。在交叉滚道槽型的固定式等速万向联轴器中,外侧联轴器构件的滚道槽由具有在轴向上没有偏置的曲率中心的圆弧状形成,并且相对于联轴器的轴线向周向倾斜,并且在相邻的滚道槽之间倾斜方向形成为彼此相反的方向,内侧联轴器构件的滚道槽的轨道中心线与外侧联轴器构件的滚道槽的轨道中心线镜像对称,在外侧联轴器构件的滚道槽与内侧联轴器构件的滚道槽之间的交叉部配置有滚珠。
27.在交叉滚道槽型的固定式等速万向联轴器中,构成为在从滚珠与滚道槽成为接触状态的小的角度的常用角、中角度至高角度的区域负载转矩时,基本上在相邻的滚道槽上产生使滚珠向彼此相反的方向按压保持器的力,因此由滚珠的作用产生的保持器的力矩和力相互平衡。在中角度至高角度的区域,各滚珠与外侧联轴器构件的滚道槽以及与内侧联轴器构件的滚道槽的接触力产生强弱,但与以往的轴向滚道偏置式相比,由滚珠的作用产生的保持器的力矩和力相互平衡,因此保持器稳定在二等分平面的附近。进而,明确了即使在滚珠失去与外侧联轴器构件的滚道槽的接触点的高工作角下,由于与以往的轴向滚道偏置式相比,由滚珠的作用产生的保持器的力矩和力依然作用于相互平衡的方向,因此保持器也不会从二等分平面较大地偏移。
28.根据以上的验证结果,得到如下结论:交叉滚道槽型的固定式等速万向联轴器在滚珠失去与外侧联轴器构件的滚道槽的接触点的状态下,保持器不会从二等分平面较大地偏移,等速性以及传递效率的降低、内部力的变化被限制在最小限度。
29.(4)新的思想
30.作为最大工作角设定为超过以往的工作角(50
°
)的角度、且为在取得高工作角时滚珠在从外侧联轴器构件出来的相位角(相位角0
°
附近)下失去接触点的工作方式的固定式等速万向联轴器,以交叉滚道槽型的固定式等速万向联轴器为基础,通过这样的思想,而实现了本发明。
31.作为用于达成前述的目的的技术方案,本发明是一种固定式等速万向联轴器,其包括:外侧联轴器构件,其在球状内周面形成有大体沿轴向延伸的多个滚道槽,且具有在轴向上分离的开口侧和里侧;内侧联轴器构件,其在球状外周面与所述外侧联轴器构件的滚道槽对置地形成有大体沿轴向延伸的多个滚道槽;转矩传递滚珠,其装入对置的各滚道槽
之间;以及保持器,其在凹袋保持该转矩传递滚珠,且形成有被所述外侧联轴器构件的球状内周面引导的球状外周面和被所述内侧联轴器构件的球状外周面引导的球状内周面,所述外侧联轴器构件的滚道槽的轨道中心线(x)至少具备圆弧状部分,所述圆弧状部分具有相对于联轴器中心(o)在轴向上没有偏置的曲率中心,包含所述轨道中心线(x)和联轴器中心(o)的平面(m)相对于联轴器的轴线(n
‑
n)倾斜,并且该倾斜方向在周向上相邻的所述滚道槽上形成为彼此相反的方向,所述内侧联轴器构件的滚道槽的轨道中心线(y)形成为在工作角0
°
的状态下以包含联轴器中心(o)且与联轴器的轴线(n
‑
n)正交的平面(p)为基准,与所述外侧联轴器构件的成对的滚道槽的轨道中心线(x)镜像对称,所述固定式等速万向联轴器的特征在于,所述固定式等速万向联轴器具有在取得最大工作角时向所述外侧联轴器构件的滚道槽的开口侧移动的至少一个所述转矩传递滚珠失去与所述外侧联轴器构件的滚道槽的开口侧端部的接触点的工作方式,在工作角0
°
的状态下,所述保持器的端部从所述外侧联轴器构件的开口侧端部沿轴向突出。
32.通过上述的结构,能够实现如下固定式等速万向联轴器:在最大工作角设定为超过以往的工作角(50
°
)的角度、且为在取得高工作角时滚珠在从外侧联轴器构件出来的相位角(0
°
相位角附近)下失去接触点的工作方式的固定式等速万向联轴器中,能够确保等速性、传递效率、耐久性并且能够使保持器的强度提升。
33.具体而言,优选的是,上述的外侧联轴器构件的滚道槽的轨道中心线x包括:圆弧状部分,其具有相对于联轴器中心o在轴向上没有偏置的曲率中心;以及与该圆弧状部分不同的形状的部分,圆弧状部分与不同的形状的部分在连接点j处平滑地连接,连接点j位于比联轴器中心o靠外侧联轴器构件的开口侧的位置。由此,能够确保等速性、传递效率,并且能够调整对确保接触点有效的滚道槽的长度、高工作角时的楔角的大小。
34.通过上述不同的形状的部分呈直线状,能够增加有效的滚道长度。
35.通过上述的保持器的凹窝侧端部配置于外侧联轴器构件的里侧,能够提高保持器的刚性。
36.优选的是,在上述的保持器中,相对于所述凹袋的中心,开口侧的轴向尺寸(w
f
)设定得比里侧的轴向尺寸(w
e
)长。由此,能够使保持器的强度提升。
37.优选的是,上述的保持器的开口侧的轴向尺寸(w
f
)与从联轴器中心(o)至外侧联轴器构件的开口侧的端面的轴向尺寸(l1)之比(w
f
/l1)为1.18~1.32。由此,能够进行保持器向外侧联轴器构件的装入,并且能够使保持器的强度提升。
38.通过将上述的转矩传递滚珠的个数设为八个以上,能够实现实用且紧凑的固定式等速万向联轴器。
39.发明效果
40.根据本发明,能够实现如下固定式等速万向联轴器:在最大工作角设定为超过以往的工作角(50
°
)的角度、且为在取得高工作角时滚珠在从外侧联轴器构件出来的相位角(0
°
相位角附近)下失去接触点的工作方式的固定式等速万向联轴器中,能够确保等速性、传递效率、耐久性并且能够使保持器的强度提升。
附图说明
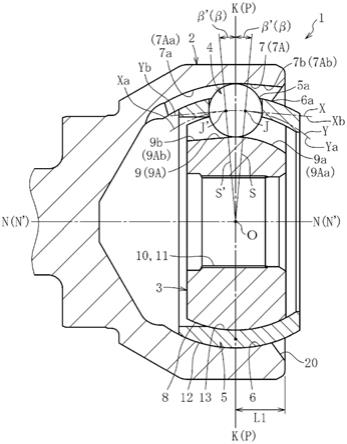
41.图1a是本发明的一实施方式的固定式等速万向联轴器的纵剖视图。
42.图1b是图1a的右侧视图。
43.图2a是图1a的外侧联轴器构件的纵剖视图。
44.图2b是图2a的右侧视图。
45.图3a是图1a的内侧联轴器构件的主视图。
46.图3b是图3a的右侧视图。
47.图4是将图1a的p
‑
p线上的一个转矩传递滚珠和滚道槽放大而得到的横剖视图。
48.图5是对图1a的固定式等速万向联轴器与以往的具有最大工作角的交叉滚道槽型的固定式等速万向联轴器各自的纵截面进行对比而得到的图。
49.图6a是图1a、图1b的固定式等速万向联轴器取得最大工作角时的纵剖视图。
50.图6b是图6a的右侧视图。
51.图7将图6a的e部放大而得到的纵剖视图。
52.图8是在图1b中表示在最大工作角下转矩传递滚珠失去与外侧联轴器构件的滚道槽的接触点的范围的图。
53.图9是示出图8的外侧联轴器构件的滚道槽与转矩传递滚珠失去接触点的范围根据滚道槽的倾斜方向而不同的状态的外侧联轴器构件的内周面的展开图。
54.图10是说明图1a所示的固定式等速万向联轴器的尺寸的特征的纵剖视图。
55.图11是示出将保持器装入外侧联轴器构件的状态的侧视图。
具体实施方式
56.基于图1~图11来说明本发明的一实施方式的固定式等速万向联轴器。图1a是本发明的一实施方式的固定式等速万向联轴器的纵剖视图,图1b是图1a的右侧视图。图2a是图1a的外侧联轴器构件的纵剖视图,图2b是图2a的右侧视图。图3a是图1a的内侧联轴器构件的纵剖视图,图3b是图3a的右侧视图。如图1a、图1b所示,本实施方式的固定式等速万向联轴器1是交叉滚道槽型的固定式等速万向联轴器,且以外侧联轴器构件2、内侧联轴器构件3、转矩传递滚珠(以下,也简称为滚珠)4以及保持器5为主要的结构。在外侧联轴器构件2的球状内周面6形成有八条滚道槽7,在内侧联轴器构件3的球状外周面8形成有与外侧联轴器构件2的滚道槽7对置的八条滚道槽9。在外侧联轴器构件2的球状内周面6与内侧联轴器构件3的球状外周面8之间配置有保持滚珠4的保持器5。保持器5的球状外周面12滑动自如地嵌合于外侧联轴器构件2的球状内周面6,保持器5的球状内周面13滑动自如地嵌合于内侧联轴器构件3的球状外周面8。
57.外侧联轴器构件2的球状内周面6和内侧联轴器构件3的球状外周面8的曲率中心分别形成于联轴器中心o,分别嵌合于外侧联轴器构件2的球状内周面6和内侧联轴器构件3的球状外周面8的保持器5的球状外周面12和球状内周面13的曲率中心也分别位于联轴器中心o。
58.在内侧联轴器构件3的内径孔10形成有内花键(花键包括锯齿。以下相同。)11,将形成于中间轴14(参照图6a)的端部的外花键15嵌合于内花键11,从而以能够传递转矩的方式连结。内侧联轴器构件3和中间轴14被挡圈16在轴向上定位。
59.如图1a、图1b、图2a、图2b、图3a以及图3b所示,外侧联轴器构件2以及内侧联轴器构件3各自的八条滚道槽7、9大体沿轴向延伸。滚道槽7、9相对于联轴器的轴线n
‑
n向周向倾
斜,并且该倾斜方向在周向上相邻的滚道槽7a、7b以及9a、9b上形成为彼此相反的方向。并且,在外侧联轴器构件2以及内侧联轴器构件3的成对的滚道槽7a、9a以及7b、9b的各交叉部配置有八个滚珠4。在图1a中,关于滚道槽7、9,分别以使图2a所示的平面m以及图3a所示的平面q的截面旋转至倾斜角γ=0
°
的状态示出。在工作角0
°
的状态下,联轴器的轴线n
‑
n也是外侧联轴器构件的轴线no
‑
no以及内侧联轴器构件的轴线ni
‑
ni。
60.作为技术方案中的“外侧联轴器构件的滚道槽的轨道中心线(x)包括:圆弧状部分,其具有相对于联轴器中心(o)在轴向上没有偏置的曲率中心;以及与该圆弧状部分不同的形状的部分,圆弧状部分与不同的形状的部分在连接点(j)处平滑地连接,连接点(j)位于比所述联轴器中心(o)靠所述外侧联轴器构件的开口侧的位置”的结构的一例,基于图1a对本实施方式的固定式等速万向联轴器1进行说明。上述的外侧联轴器构件的滚道槽的轨道中心线x包括:圆弧状部分,其具有相对于联轴器中心o在轴向上没有偏置的曲率中心;以及与该圆弧状部分不同的形状的部分,因此能够确保等速性、传递效率、耐久性,并且能够调整对确保接触点有效的滚道槽的长度、高工作角时的楔角的大小。
61.如图1a所示,外侧联轴器构件2的滚道槽7具有轨道中心线x,滚道槽7包括:第一滚道槽部7a,其具有以联轴器中心o为曲率中心的圆弧状的轨道中心线xa;以及第二滚道槽部7b,其具有直线状的轨道中心线xb,在第一滚道槽部7a的轨道中心线xa处,第二滚道槽部7b的轨道中心线xb作为切线而平滑地连接。上述直线状的部分成为前述的与圆弧状部分不同的形状的部分。第一滚道槽部7a的轨道中心线xa意味着,本说明书以及技术方案中的外侧联轴器构件的滚道槽的轨道中心线x至少具备的“具有相对于联轴器中心(o)在轴向上没有偏置的曲率中心的圆弧状部分”。
62.为了确切地示出大体沿轴向延伸的滚道槽的形态、形状,在本说明书中,使用轨道中心线这样的用语进行说明。在此,轨道中心线是指配置于滚道槽的滚珠沿着滚道槽移动时的滚珠的中心所描绘的轨迹。
63.如图1a所示,内侧联轴器构件3的滚道槽9具有轨道中心线y,滚道槽9包括:第一滚道槽部9a,其具有以联轴器中心o为曲率中心的圆弧状的轨道中心线ya;以及第二滚道槽部9b,其具有直线状的轨道中心线yb,在第一滚道槽部9a的轨道中心线ya处,第二滚道槽部9b的轨道中心线yb作为切线而平滑地连接。通过将外侧联轴器构件2和内侧联轴器构件3的第一滚道槽部7a、9a的轨道中心线xa、ya的各曲率中心配置于联轴器中心o、即联轴器的轴线n
‑
n上,能够使滚道槽深度均匀,并且能够使加工容易。
64.基于图2a、图2b,详细地说明外侧联轴器构件2的滚道槽7相对于联轴器的轴线n
‑
n向周向倾斜的状态。外侧联轴器构件2的滚道槽7根据其倾斜方向的不同,标注滚道槽7a、7b的附图标记。如图2a所示,包含滚道槽7a的轨道中心线x和联轴器中心o的平面m相对于联轴器的轴线n
‑
n以角度γ倾斜。并且,对于与滚道槽7a在周向上相邻的滚道槽7b,虽然省略图示,但包含滚道槽7b的轨道中心线x和联轴器中心o的平面m相对于联轴器的轴线n
‑
n向与滚道槽7a的倾斜方向相反的方向以角度γ倾斜。
65.在本实施方式中,滚道槽7a的轨道中心线x的整个区域、即第一滚道槽部7a的轨道中心线xa以及第二滚道槽部7b的轨道中心线xb这两方形成于平面m上。
66.在此,对滚道槽的附图标记进行补充。在表示外侧联轴器构件2的滚道槽整体的情况下标注附图标记7,对其第一滚道槽部标注附图标记7a,对其第二滚道槽部标注附图标记
7b。并且,在区别倾斜方向不同的滚道槽的情况下标注附图标记7a、7b,对各自的第一滚道槽部标注附图标记7aa、7ba,对第二滚道槽部标注附图标记7ab、7bb。关于后述的内侧联轴器构件3的滚道槽,也按相同的规则标注附图标记。
67.接下来,基于图3a、图3b,详细地说明内侧联轴器构件3的滚道槽9相对于联轴器的轴线n
‑
n向周向倾斜的状态。内侧联轴器构件3的滚道槽9根据其倾斜方向的不同,标注滚道槽9a、9b的附图标记。如图3a所示,包含滚道槽9a的轨道中心线y和联轴器中心o的平面q相对于联轴器的轴线n
‑
n以角度γ倾斜。并且,对于与滚道槽9a在周向上相邻的滚道槽9b,虽然省略图示,但包含滚道槽9b的轨道中心线y和联轴器中心o的平面q相对于联轴器的轴线n
‑
n向与滚道槽9a的倾斜方向相反的方向以角度γ倾斜。考虑到固定式等速万向联轴器1的工作性以及内侧联轴器构件3的滚道槽9的最接近的一侧的球面宽度i,倾斜角γ优选为4
°
~12
°
。
68.另外,与前述的外侧联轴器构件2同样地,在本实施方式中,滚道槽9a的轨道中心线y的整个区域、即第一滚道槽部9a的轨道中心线ya以及第二滚道槽部9b的轨道中心线yb这两方形成于平面q上。内侧联轴器构件3的滚道槽9的轨道中心线y形成为:在工作角0
°
的状态下,以包含联轴器中心o且与联轴器的轴线n
‑
n正交的平面p为基准,与外侧联轴器构件2的成对的滚道槽7的轨道中心线x镜像对称。
69.基于图1a,来说明通过外侧联轴器构件2以及内侧联轴器构件3的纵截面观察到的滚道槽的详细情况。在图1a中,如前述那样,关于滚道槽7、9,分别以使图2a所示的平面m以及图3a所示的平面q的截面旋转至倾斜角γ=0
°
的状态示出。即,关于外侧联轴器构件2,是在图2a的包含外侧联轴器构件2的滚道槽7a的轨道中心线x和联轴器中心o的平面m处观察到的剖视图。因此,严格来说,不是包含联轴器的轴线n
‑
n的平面的纵剖视图,而示出以角度γ倾斜了的截面。在图1a中,示出了外侧联轴器构件2的滚道槽7a,但滚道槽7b只是倾斜方向与滚道槽7a为相反方向,其他结构与滚道槽7a相同,因此省略说明。在外侧联轴器构件2的球状内周面6大体沿着轴向形成有滚道槽7a。
70.滚道槽7a具有轨道中心线x,滚道槽7a包括:第一滚道槽部7aa,其具有以联轴器中心o为曲率中心(没有轴向的偏置)的圆弧状的轨道中心线xa;以及第二滚道槽部7ab,其具有直线状的轨道中心线xb。并且,在第一滚道槽部7aa的轨道中心线xa的开口侧的端部j处,第二滚道槽部7ab的直线状的轨道中心线xb作为切线而平滑地连接。即,端部j是第一滚道槽部7aa与第二滚道槽7ab的连接点。端部j位于比联轴器中心o靠开口侧的位置,因此在第一滚道槽部7aa的轨道中心线xa的开口侧的端部j处作为切线而连接的第二滚道槽部7ab的直线状的轨道中心线xb形成为随着趋向开口侧而接近联轴器的轴线n
‑
n。由此,能够使有效的滚道长度增加,能够抑制楔角变得过大的情况。
71.如图1a所示,将连结端部j与联轴器中心o的直线设为s。投影在包含滚道槽7a的轨道中心线x和联轴器中心o的平面m上的联轴器的轴线n
’‑
n’相对于联轴器的轴线n
‑
n以γ倾斜,将轴线n
’‑
n’的联轴器中心o处的垂线k与直线s所成的角度设为β’。上述的垂线k处于工作角0
°
的状态下的包含联轴器中心o且与联轴器的轴线n
‑
n正交的平面p上。因此,本发明所说的直线s相对于平面p所成的角度β为sinβ=sinβ
’×
cosγ的关系。
72.同样地,基于图1a,通过内侧联轴器构件3的纵截面来说明滚道槽的详细。图示是在包含图3a的内侧联轴器构件3的滚道槽9a的轨道中心线y和联轴器中心o的平面q处观察
到的剖视图。因此,严格来说,不是包含联轴器的轴线n
‑
n的平面的纵剖视图,而示出以角度γ倾斜了的截面。在图1a中,示出了内侧联轴器构件3的滚道槽9a,但滚道槽9b只是倾斜方向与滚道槽9a为相反方向,其他结构与滚道槽9a相同,因此省略说明。在内侧联轴器构件3的球状外周面8大体沿着轴向形成有滚道槽9a。
73.滚道槽9a具有轨道中心线y,滚道槽9a包括:第一滚道槽部9aa,其具有以联轴器中心o为曲率中心(没有轴向的偏置)的圆弧状的轨道中心线ya;以及第二滚道槽部9ab,其具有直线状的轨道中心线yb。并且,在第一滚道槽部9aa的轨道中心线ya的里侧的端部j’处,第二滚道槽部9ab的轨道中心线yb作为切线而平滑地连接。即,端部j’是第一滚道槽部9aa与第二滚道槽9ab的连接点。端部j’位于比联轴器中心o靠里侧的位置,因此在第一滚道槽部9aa的轨道中心线ya的里侧的端部j’处作为切线而连接的第二滚道槽部9ab的直线状的轨道中心线yb形成为随着趋向里侧而接近联轴器的轴线n
‑
n。由此,能够使有效的滚道长度增加,并且抑制楔角变得过大的情况。
74.如图1a所示,将连结端部j’与联轴器中心o的直线设为s’。投影在包含滚道槽9a的轨道中心线y和联轴器中心o的平面q上的联轴器的轴线n
’‑
n’相对于联轴器的轴线n
‑
n以γ倾斜,将轴线n
’‑
n’的联轴器中心o处的垂线k与直线s’所成的角度设为β’。上述的垂线k处于工作角0
°
的状态下的包含联轴器中心o且与联轴器的轴线n
‑
n正交的平面p上。因此,直线s’相对于工作角0
°
的状态下的包含联轴器中心o的平面p所成的角度β为sinβ=sinβ
’×
cosγ的关系。
75.接下来,对直线s、s’相对于工作角0
°
的状态下的包含联轴器中心o且与联轴器的轴线n
‑
n正交的平面p所成的角度β进行说明。在取得工作角θ时,相对于包含外侧联轴器构件2以及内侧联轴器构件3的联轴器中心o的平面p,滚珠4移动θ/2。通过使用频率高的工作角的1/2来决定角度β,在使用频率高的工作角的范围内,决定滚珠4所接触的滚道槽的范围。在此,对使用频率高的常用角进行定义。联轴器的常用角是指,在水平且平坦的路面上一名乘客时的机动车中,在使操纵方向为直行状态时前部用驱动轴的固定式等速万向联轴器所产生的工作角。常用角通常在2
°
~15
°
之间,根据每种车型的设计条件来选择、决定。
76.根据上述的角度β,在图1a中,第一滚道槽部7aa的轨道中心线xa的端部j成为在常用角时沿着轴向移动至最靠开口侧时的滚珠的中心位置。同样地,在内侧联轴器构件3中,第一滚道槽部9aa的轨道中心线ya的端部j’成为在常用角时沿着轴向移动至最靠里侧时的滚珠的中心位置。由于像这样设定,因此在常用角的范围内,滚珠4位于外侧联轴器构件2以及内侧联轴器构件3的第一滚道槽部7aa、9aa和倾斜方向相反的7ba、9ba,因此从滚珠4向保持器5的在周向上相邻的凹袋部5a作用相反的方向的力,保持器5稳定在联轴器中心o的位置(参照图1a)。因此,保持器5的球状外周面12与外侧联轴器构件2的球状内周面6的接触力、以及保持器5的球状内周面13与内侧联轴器构件3的球状外周面8的接触力被抑制,转矩损失、发热被抑制,耐久性提升。
77.在高工作角的范围内,沿周向配置的滚珠4暂时分开位于第一滚道槽部7aa、9aa和第二滚道槽部7ab、9ab。伴随于此,产生保持器5与外侧联轴器构件2的球面接触部12、6以及保持器5与内侧联轴器构件3的球面接触部13、8之间的接触力,但与以往的轴向滚道偏置式相比,由滚珠4的作用产生的保持器5的力矩和力相互平衡,因此保持器5稳定于二等分平面的附近。另外,高工作角的范围的使用频率低,因此本实施方式的固定式等速万向联轴器1
综合来看能够抑制转矩损失、发热。因此,能够实现转矩损失以及发热少且高效率的固定式等速万向联轴器。
78.图4是将图1a的p
‑
p线上的一个滚珠和滚道槽放大而得到的横剖视图。但是,对于滚道槽7、9,分别以使图2a所示的平面m以及图3a所示的平面q的截面旋转到倾斜角γ=0
°
的状态示出。外侧联轴器构件2的滚道槽7以及内侧联轴器构件3的滚道槽9的横截面形状为椭圆形状、尖拱形状,如图4所示,滚珠4与外侧联轴器构件2的滚道槽7在两点c1、c2处角接触,与内侧联轴器构件3的滚道槽9在两点c3、c4处角接触。穿过滚珠4的中心ob和各接触点c1、c2、c3、c4的直线与穿过滚珠4的中心ob和联轴器中心o(图1a参照)的直线所成的角度(接触角α)优选设定为30
°
以上。需要说明的是,也可以使滚道槽7、9的横截面形状为圆弧形状,并使滚道槽7、9与滚珠4的接触为环状接触。
79.本实施方式的固定式等速万向联轴器1的整体的结构如以上那样。本实施方式的固定式等速万向联轴器1设定为大幅超过50
°
的最大工作角,但其特征性的结构如以下那样。
80.(1)在交叉滚道槽型的固定式等速万向联轴器中,实现了在取得最大工作角时滚珠失去接触点的工作方式。
81.(2)此外,在工作角0
°
的状态下,保持器的端部从外侧联轴器构件的开口侧端部沿轴向突出。
82.通过上述的结构,在交叉滚道槽型的固定式等速万向联轴器中,设为在取得最大工作角时滚珠失去接触点的工作方式,因此即使在滚珠4失去与外侧联轴器构件2的滚道槽7的接触点的高工作角下,由于由滚珠4的作用产生的保持器5的力矩和力作用于相互平衡的方向,因此保持器5也不会从二等分平面较大地偏移,能够将等速性以及传递效率的降低、内部力的变化限制在最小限度,在上述交叉滚道槽型的固定式等速万向联轴器为基础而具有的有利的特征性的结构(1)上结合特征性的结构(2),而能够实现能够确保等速性、传递效率、耐久性并且能够使保持器的强度提升的固定式等速万向联轴器。
83.首先,基于图5对本实施方式的固定式等速万向联轴器1的特征性的结构(1)进行说明。相对于图5的中心线(联轴器的轴线),上侧一半是本实施方式的固定式等速万向联轴器1的纵剖视图,下侧一半是以往的具有最大工作角的使用了八个滚珠的交叉滚道槽型的固定式等速万向联轴器的纵剖视图。下侧一半所示的以往的具有最大工作角的交叉滚道槽型的固定式等速万向联轴器101的最大工作角为47
°
。固定式等速万向联轴器101以外侧联轴器构件102、内侧联轴器构件103、滚珠104以及保持器105为主要的结构。固定式等速万向联轴器101的外侧联轴器构件102、内侧联轴器构件103的滚道槽107、109与本实施方式的滚道槽7、9相同,因此仅说明概要。
84.固定式等速万向联轴器101的外侧联轴器构件102以及内侧联轴器构件103的滚道槽107、109分别由第一滚道槽部107a、109a和第二滚道槽部107b、109b形成。第一滚道槽部107a、109a分别具有以联轴器中心o为曲率中心(没有轴向的偏置)的圆弧状的轨道中心线xa、ya,第二滚道槽部107b、109b分别具有直线状的轨道中心线xb、yb。外侧联轴器构件102的第一滚道槽部107a的轨道中心线xa与第二滚道槽部107b的轨道中心线xb在比联轴器中心o靠开口侧的连接点a处以切线平滑地连接。内侧联轴器构件103的第一滚道槽部109a的轨道中心线ya与第二滚道槽部109b的轨道中心线yb在里侧的连接点a’处以切线平滑地连
接。
85.与本实施方式的固定式等速万向联轴器1同样地,外侧联轴器构件102以及内侧联轴器构件103的滚道槽107、109分别相对于联轴器的轴线n
‑
n向周向倾斜,并且在周向上相邻的滚道槽107、109分别将倾斜方向形成为相反方向。连结连接点a、a’与联轴器中心o的直线l、l’相对于包含联轴器中心o且与联轴器的轴线n
‑
n正交的平面p的角度β1设定得比本实施方式的固定式等速万向联轴器1的角度β大。
86.固定式等速万向联轴器101具有直到最大工作角(47
°
)都始终确保滚珠104与外侧联轴器构件102的滚道槽107的接触状态的工作方式。在外侧联轴器构件102的开口侧端部设置的入口倒角120设定为,在最大工作角下,不与中间轴发生干涉,并且确保滚珠104与外侧联轴器构件102的滚道槽107的接触状态。因此,外侧联轴器构件102的从联轴器中心o至开口侧的端面的轴向尺寸l2设定得比较长。
87.在需要最大工作角超过47
°
的高工作角的情况下,中间轴与入口倒角120发生干涉,因此为了避免该情况,而使入口倒角120向联轴器中心o这侧沿轴向移动,并且适当增加倾斜角度,但伴随于此,需要缩短外侧联轴器构件102的从联轴器中心o到开口侧的端面的轴向尺寸。与此对应的是本实施方式的固定式等速万向联轴器1,成为大幅超过以往的最大工作角的设定。在图5的上侧一半所示的本实施方式的固定式等速万向联轴器1中,外侧联轴器构件2的从联轴器中心o到开口侧的端面的轴向尺寸l1相比下侧一半所示的以往的具有最大工作角的固定式等速万向联轴器101的从外侧联轴器构件102的联轴器中心o到开口侧的端面的轴向尺寸l2缩短。
88.参照图6a、图6b对本实施方式的固定式等速万向联轴器1取得最大工作角时的状态进行说明。图6a是固定式等速万向联轴器1取得最大工作角时的纵剖视图,图6b是图6a的右侧视图。如上述那样,由于外侧联轴器构件2的开口侧的滚道槽7的长度减少,因此本实施方式的固定式等速万向联轴器1的工作方式如图6a所示,在取得大幅大于以往的最大工作角θmax时,成为滚珠4从外侧联轴器构件2的滚道槽7的开口侧的端部脱离而失去与滚道槽7的接触点的状态。另外,成为滚珠4从内侧联轴器构件3的滚道槽9的里侧的端部脱离而失去与滚道槽9的接触点的状态。如图6b所示,在取得最大工作角θmax时,滚珠4的中心ob在相位角0
°
的位置从外侧联轴器构件2的滚道槽7的开口侧端部脱离最大。
89.图6a示出使内侧联轴器构件3(中间轴14)的轴线ni
‑
ni相对于外侧联轴器构件2的轴线no
‑
no在该图的纸面上弯折至最大工作角θmax(例如,55
°
)的状态。保持器5的轴线nc
‑
nc以二等分角度θmax/2倾斜。在此,相位角0
°
定义为在图1b所示的工作角为0
°
的状态下最上侧(顶点)的滚珠4的中心ob的周向的角度位置。在本说明书以及技术方案中,相位角以从相位角0
°
(在图6b中表记为以下也称为)向逆时针方向增加的规则表示。另外,在本说明书以及技术方案中,最大工作角θmax以固定式等速万向联轴器1在使用时能够允许的最大的工作角这样的意思使用。
90.在图6a中,以在最大工作角时中间轴14与入口倒角20抵接的状态图示,但实际上,入口倒角20设定为在取得最大工作角时与中间轴14的外径面之间稍微具有富余的形状、尺寸,入口倒角20作为中间轴14超过最大工作角时的限位面而发挥功能。
91.如图6a所示,在本实施方式的固定式等速万向联轴器1中,在取得最大工作角时,
成为朝向外侧联轴器构件2的滚道槽7的开口侧移动的相位角附近的滚珠4从外侧联轴器构件2的滚道槽7的开口侧的端部(入口倒角20)脱离而失去与滚道槽7的接触点,且滚珠4从内侧联轴器构件3的滚道槽9的里侧的端部脱离而失去与滚道槽9的接触点的状态。参照将图6a的e部放大而得到的图7来说明该状态的详细情况。
92.以虚线表示在外侧联轴器构件2的开口侧的端部形成的入口倒角20、与滚道槽7、9接触的情况下的滚珠4的表面位置4ao、4ai以及与保持器5的凹袋5a接触的滚珠4的表面位置4b。另外,将在轴向上连结外侧联轴器构件2的滚道槽7与滚珠4的接触点c2(或者c1,参照图4)而得到的接触点轨迹设为clo,将在轴向上连结内侧联轴器构件3的滚道槽9与滚珠4的接触点c3(或者c4,参照图4)而得到的接触点轨迹设为cli,以虚线表示它们。接触点轨迹clo、cli形成于从滚道槽7、9的槽底分离的位置。
93.接触点轨迹clo在外侧联轴器构件2的开口侧且入口倒角20的缘部处结束。该入口倒角20的缘部是外侧联轴器构件2的滚道槽7的开口侧的端部。滚珠4的表面位置4ao相对于接触点轨迹clo的终端向图7的右方向偏移,滚珠4与滚道槽7成为非接触状态。失去与滚道槽7的接触点的滚珠4为八个中的1~2个左右。该滚珠4不参与转矩传递。内侧联轴器构件3的滚道槽9的接触点轨迹cli在里侧的端部3a处结束。滚珠4的表面位置4ai相对于接触点轨迹cli的终端向图7的左方向偏移,滚珠4与滚道槽9成为非接触状态。滚珠4的表面位置4ao与外侧联轴器构件2的滚道槽7的接触点轨迹clo的终端之间的偏移量设定得比滚珠4的表面位置4ai与内侧联轴器构件3的滚道槽9的接触点轨迹cli的终端之间的偏移量大。
94.滚珠4的表面位置4b相对于保持器5在保持器5的球状外周面12近前的半径方向位置与凹袋5a确保接触状态。并且,凹袋5a与滚珠4设定为极微小的过盈量的嵌合,并且,由于与内侧联轴器构件3的滚道槽9的非接触状态,因此也没有滚道槽9与滚珠4之间的不可避免的干涉,因此滚珠4被可靠地保持在凹袋5a内,异响的产生等得到防止。即使万一滚珠4从凹袋5a脱离,由于滚道槽7的入口倒角20的缘部与保持器5的凹袋5a的缘部的间隔w相对于滚珠4的直径db设定为db>w的关系,因此防止滚珠4的脱落。
95.接下来,参照图8对滚珠4从滚道槽7脱离的范围、即滚珠4与滚道槽7成为非接触状态的相位角的范围(以下,也简称为范围)进行说明。图8是在图1b表示在最大工作角下滚珠4从外侧联轴器构件2的滚道槽7脱离的范围的图。在图8中以箭头表示滚珠4从外侧联轴器构件2的滚道槽7脱离的范围。各箭头的引出线表示滚珠4的中心ob。在本实施方式的固定式等速万向联轴器1中,外侧联轴器构件2的滚道槽7a、7b具有相对于联轴器的轴线n
‑
n向周向的倾斜角γ,并且在周向上相邻的滚道槽7a、7b的倾斜方向形成为彼此相反的方向,因此滚珠4从滚道槽7a脱离的相位角范围m
a
与从滚道槽7b脱离的相位角范围m
b
如图8所示相差一些。
96.以图6a、图6b以及图8中的位于滚道槽7a的一个滚珠4为例具体地说明滚珠4从滚道槽7脱离的范围。使图6a所示的外侧联轴器构件2的轴线no
‑
no和内侧联轴器构件3(中间轴14)的轴线ni
‑
ni为恒定状态,在使固定式等速万向联轴器1从相位角向逆时针方向旋转时,在图8的相位角的近前的相位角(例如,)的位置,滚珠4从外侧联轴器构件2的滚道槽7a的开口侧的端部脱离并开始失去与滚道槽7a的接触点的非接触状态。然后,越过相位角而在相位角(例如,)的位置,滚珠4返回外侧联轴
器构件2的滚道槽7a的开口侧的端部并开始与滚道槽7a的接触状态。
97.在上述中,以一个滚珠4为例进行了说明,但当使固定式等速万向联轴器1旋转时,实际上八个滚珠4依次通过成为非接触状态的相位角的范围。位于滚道槽7b的滚珠4也是同样的,但滚道槽7b与滚道槽7a的倾斜方向形成为相反方向,因此滚珠4从外侧联轴器构件2的滚道槽7b的开口侧的端部脱离并开始失去与滚道槽7b的接触点的非接触状态的相位角是(例如,),滚珠4返回外侧联轴器构件2的滚道槽7b的开口侧的端部并开始与滚道槽7b的接触状态的相位角是(例如,(例如,)。因此,如图8所示,滚珠4从滚道槽7a脱离的范围m
a
与从滚道槽7b脱离的范围m
b
相差一些。
98.并且,参照图9对上述的理由进行说明。图9是示出图8的外侧联轴器构件的滚道槽与转矩传递滚珠失去接触点的范围根据滚道槽的倾斜方向而不同的状态的外侧联轴器构件的内周面的展开图。在图9中,图的上下方向的中心线的右侧表示滚珠4从滚道槽7a脱离的状态,左侧表示滚珠4从滚道槽7b脱离的状态。图9的空心箭头表示从内侧联轴器构件3向外侧联轴器构件2的转矩负载方向。
99.滚道槽7相对于轴线倾斜,因此与图9的转矩负载方向相应地,滚道槽7a在相比滚珠4的中心ob向里侧方向偏移的位置接触,滚道槽7b在相比滚珠4的中心ob向开口侧方向偏移的位置接触。因此,滚珠4的表面位置4ao卡挂于滚道槽7a的接触点轨迹clo的终端(入口倒角20的缘部),成为失去接触点的相位角另一方面,卡挂于滚道槽7b的接触点轨迹clo的终端(入口倒角20的缘部),成为失去接触点的相位角因此,相位角与产生差。
100.滚珠4返回滚道槽7并开始接触状态的相位角由于与上述的理由相同,因此展开图省略,但滚珠4的表面位置4ao返回滚道槽7a的接触点轨迹clo的终端(入口倒角20的缘部)并开始接触状态的相位角成为(参照图8),另一方面,返回滚道槽7b的接触点轨迹clo的终端(入口倒角20的缘部)并开始接触状态的相位角成为(参照图8)。其结果是,在取得最大工作角并向逆时针方向旋转的情况下,如图8所示,滚珠4失去与滚道槽7a接触点的范围m
a
小于失去与滚道槽7b接触点的范围m
b
。相反地,在向顺时针方向旋转的情况下,与上述相反地,滚珠4失去与滚道槽7a的接触点的范围m
a
大于与失去与滚道槽7b的接触点的范围m
b
。
101.本实施方式的固定式等速万向联轴器1如前述的那样,在取得最大工作角时,成为朝向外侧联轴器构件2的滚道槽7的开口侧移动的相位角附近的滚珠4从外侧联轴器构件2的滚道槽7的开口侧的端部(入口倒角20)脱离而失去与滚道槽7的接触点,且滚珠4从内侧联轴器构件3的滚道槽9的里侧的端部脱离而失去与滚道槽9的接触点的状态。但是,设定为,位于与相位角附近在直径方向上对置的相位角的滚珠4如图6a所示,在外侧联轴器构件2的滚道槽7的里侧具有接触点,并且在内侧联轴器构件3的滚道槽9的开口侧具有接触点。由此,承受负载的滚珠4的个数增加,并且内部力的平衡提升,能够维持强度、耐久性。
102.接下来,参照图10~图11来说明本实施方式的固定式等速万向联轴器1的特征性
的结构(2),即,在工作角0
°
的状态下,保持器的端部从外侧联轴器构件的开口侧端部沿轴向突出。图10是说明图1a所示的固定式等速万向联轴器1的尺寸的特征的纵剖视图,图11是示出将保持器装入外侧联轴器构件的状态的侧视图。
103.如图10所示,本实施方式的固定式等速万向联轴器1为了提高保持器5的刚性,将具有用于将内侧联轴器构件3装入保持器5的圆筒状内径面5c的凹窝侧端部5b配置于外侧联轴器构件2的里侧。并且,保持器5的球状外周面12以及球状内周面13的曲率中心分别位于联轴器中心o,在工作角为0
°
的状态下,保持器5的凹袋5a的中心oc与联轴器中心o的轴向的位置一致。本实施方式的固定式等速万向联轴器1的保持器5成为相对于凹袋5a的中心oc非对称的形状。
104.具体而言,相对于凹袋5a的中心oc,外侧联轴器构件2的里侧方向的轴向尺寸w
e
与开口侧的轴向尺寸w
f
成为w
f
>w
e
的关系,开口侧的轴向尺寸w
f
设定得较长。并且,开口侧的轴向尺寸w
f
设定得比从联轴器中心o至外侧联轴器构件2的开口侧的端面的轴向尺寸l1长(w
f
>l1)。换句话说,在工作角0
°
的状态下,保持器5的端部从外侧联轴器构件2的开口侧端部沿轴向突出。本说明书以及权利要求中的“在工作角0
°
的状态下,所述保持器的端部从所述外侧联轴器构件的开口侧端部沿轴向突出”是上述的意思。
105.关于上述的w
f
>l1的设定,对本实施方式的交叉滚道槽型的固定式等速万向联轴器1中的保持器5向外侧联轴器构件2的装入方法进行了研究。在将保持器5向外侧联轴器构件2装入的情况下,如图11所示,使保持器5的轴线相对于外侧联轴器构件2的轴线正交且沿纵方向配置,且以使外侧联轴器构件2的球状内周面6跨越保持器5的凹袋5a的状态装入。交叉滚道槽型由于相邻的滚道槽7a、7b向相反方向倾斜,因此在外侧联轴器构件2的开口侧端部存在球状内周面6变窄而成的部分6s,因此能够使从凹袋5a的中心oc至保持器5的端面的长度非对称。
106.上述的理由是因为:如图11所示,在外侧联轴器构件2的开口侧端部存在球状内周面6变窄而成的部分6s,因此在保持器凹袋宽度(滚珠的直径)与外侧联轴器构件的开口侧端部的球状内周面宽度的限制(需要使保持器凹袋宽度长于球状内周面宽度)上产生富余,能够容易地插入,并且能够以将外侧联轴器构件2的轴心与保持器5的轴心错开的配置(错开量e)插入。
107.保持器5的开口侧的轴向尺寸w
f
与从联轴器中心o至外侧联轴器构件2的开口侧的端面的轴向尺寸l1之比w
f
/l1期望设定为1.18~1.32。在w
f
/l1<1.18的情况下,在取得最大工作角时,向外侧联轴器构件2的球状内周面6的里侧移动最大的保持器5的开口侧端面部分(相位角分(相位角)位于比联轴器中心o靠里侧的位置,无法期待保持器5的强度提升。与此相对,在本实施方式的固定式等速万向联轴器1中,为w
f
/l1≥1.18,因此如图6a的下侧所示,向外侧联轴器构件的2的球状内周面6的里侧移动最大的保持器5的开口侧端面部分(相位角)位于相比联轴器中心o向开口侧隔开距离u的位置,因此能够使保持器5的强度提升。另一方面,在w
f
/l1>1.32的情况下,保持器5的开口侧的轴向尺寸w
f
变得过长,因此无法在外侧联轴器构件装入保持器。
108.通过本实施方式的固定式等速万向联轴器1的特征性的结构(2),即在工作角0
°
的状态下,保持器的端部从外侧联轴器构件的开口侧端部沿轴向突出,从而在交叉滚道槽型的固定式等速万向联轴器中,即使在以超过50
°
的工作角使用且滚珠失去与滚道槽的接触
点时作用于保持器5的力的平衡破坏而对保持器5作用过大的负载的情况下,也能够确保固定式等速万向联轴器1的开口侧端部的保持器5的壁厚、保持器5与外侧联轴器构件2在比联轴器中心o靠开口侧处的接触范围,因此能够使保持器5的强度提升。
109.如以上说明的那样,本实施方式的固定式等速万向联轴器1在交叉滚道槽型的固定式等速万向联轴器中,设为在取得最大工作角时滚珠失去接触点的工作方式,因此即使在滚珠4失去与外侧联轴器构件2的滚道槽7的接触点的高工作角下,由于由滚珠4的作用产生的保持器5的力矩和力作用于相互平衡的方向,因此保持器5也不会从二等分平面较大地偏移,能够将等速性以及传递效率的降低、内部力的变化限制在最小限度,在上述交叉滚道槽型的固定式等速万向联轴器为基础而具有的有利的特征性的结构(1)上结合特征性的结构(2),能够实现能够确保等速性、传递效率、耐久性并且能够使保持器的强度提升的固定式等速万向联轴器。
110.在以上的实施方式中,例示了如下固定式等速万向联轴器1,该固定式等速万向联轴器1的外侧联轴器构件2、内侧联轴器构件3的向周向倾斜的滚道槽7、9包括:第一滚道槽部7a、9a,其具有以联轴器中心o为曲率中心的圆弧状的轨道中心线xa、ya;以及第二滚道槽部7b、9b,其具有直线状的轨道中心线xb、yb,但并不限于此,也能够设为外侧联轴器构件2、内侧联轴器构件3的向周向倾斜的滚道槽7、9的轴向整个区域由以联轴器中心o为曲率中心的圆弧状的轨道中心线x、y形成的固定式等速万向联轴器。
111.本发明并不受前述的实施方式任何限定,在不脱离本发明的主旨的范围内,当然还能够以各种方式实施,本发明的范围由技术方案示出,还包括与技术方案的记载同等的意思以及范围内的全部的变更。
112.附图标记说明:
113.1固定式等速万向联轴器
114.2外侧联轴器构件
115.3内侧联轴器构件
116.3a端部
117.4转矩传递滚珠
118.5保持器
119.5a凹袋
120.5b凹窝侧端部
121.6球状内周面
122.7滚道槽
123.7a第一滚道槽部
124.7b第二滚道槽部
125.8球状外周面
126.9滚道槽
127.9a第一滚道槽部
128.9b第二滚道槽部
129.12球状外周面
130.13球状内周面
131.20入口倒角
132.clo接触点轨迹
133.cli接触点轨迹
134.l1从联轴器中心至开口侧的端面的轴向尺寸
135.m平面
136.n联轴器的轴线
137.o联轴器中心
138.ob滚珠的中心
139.oc凹袋的中心
140.p平面
141.q平面
142.w间隔
143.w
e
里侧方向的轴向尺寸
144.w
f
开口侧的轴向尺寸
145.x轨道中心线
146.xa轨道中心线
147.xb轨道中心线
148.y轨道中心线
149.ya轨道中心线
150.yb轨道中心线
151.θmax最大工作角
152.相位角
153.相位角
154.相位角。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1