用于极紫外光源中的流体控制的流体控制设备和方法与流程
用于极紫外光源中的流体控制的流体控制设备和方法
1.相关申请的交叉引用
2.本技术要求2019年5月24日提交的标题为“fluid control device and method for fluid control in an extreme ultraviolet light source”的美国申请第62/852,685号的优先权,该申请通过引用整体结合于此。
技术领域
3.所公开的主题涉及可以在激光产生等离子体极紫外光源中使用的用于流体控制的流体控制设备和方法。
背景技术:
4.极紫外(euv)光(例如,具有波长约为50nm或更小的电磁辐射(有时也称为软x射线),并且包括大约13nm波长处的光)可以用在光刻工艺中以在衬底(例如硅晶片)中产生极小的特征。
5.产生euv光的方法包括但不必限于将具有在euv范围内的发射谱线的元素(例如,氙、锂或锡)的材料转换为等离子体状态。在一种通常被称为激光产生等离子体(lpp)这样的方法中,可以通过使用放大光束(其可以被称为驱动激光)辐射例如材料的滴、板、带、流或簇形式的目标材料来产生所需的等离子体。对于该过程,等离子体通常在密封容器(例如,真空腔室)中产生,并且使用各种类型的计量设备进行监测。
技术实现要素:
6.在一些总体方面,一种双模式流体控制设备包括:结构,限定阀腔和流体地联接到阀腔的三个流体端口,第一流体端口被配置为流体地联接到真空泵,第二流体端口被配置为流体地联接到流体源,以及第三流体端口被配置为流体地联接到主体的气密内部;以及单个柱塞阀,位于阀腔内并且被配置为在第一模式与第二模式之间移动,同时维持主体的气密内部。第一模式对应于真空模式,在真空模式下,柱塞阀打开,使得第一流体流动路径在气密内部与第一流体端口之间打开,并且流体在真空泵与气密内部之间自由通过。第二模式对应于压力模式,在压力模式下,柱塞阀关闭,使得第一流体端口与气密内部被柱塞阀阻挡开,并且第二流体流动路径在气密内部与第二流体端口之间打开。
7.实现方式可以包括以下一个或多个特征。例如,第一流体端口可以具有提供第一流体传导率的第一横截面积,并且第二流体端口可以具有提供第二流体传导率的第二横截面积,第一横截面积大于第二横截面积。第一横截面积的大小可以是第二横截面积的至少两倍、至少五倍、至少十倍、至少五十倍或大约一百倍。
8.第二模式可以是默认模式,在默认模式下,柱塞阀处于其平衡位置。流体控制设备可以包括偏置设备,偏置设备与柱塞阀物理连通并且被配置为将柱塞阀偏置到第二模式。
9.当柱塞阀处于第二模式并且关闭时,可以形成将真空泵与气密内部隔开的密封,并且柱塞阀暴露于高于大气压力的压力。当柱塞阀由于从流体源针对柱塞阀施加的压力而
处于第二模式下时,密封可以加强或保持恒定的强度。
10.在真空模式下,气密内部的压力可以维持在低于大气压力,并且在压力模式下,气密内部的压力可以维持在高于大气压力。在真空模式下,气密内部的压力可以维持在其中分子流在第一流体流动路径和气密内部内占主导地位的高真空或超高真空。在真空模式下,气密内部的压力可以被维持低于101千帕(kpa),并且在压力模式下,气密内部的压力可以被维持高于10兆帕(mpa)。在各种实现方式中,真空模式适于支持低于例如10kpa、3kpa或1kpa的压力。在各种实现方式中,压力模式适于支持高于例如5mpa、10mpa或24mpa的压力。
11.当柱塞阀处于第一模式时,流体可以从气密内部到真空泵自由通过。
12.柱塞阀可以被配置为通过在第一模式与第二模式之间线性平移且不旋转来在第一模式与第二模式之间移动。流体控制设备可以包括致动器,致动器与柱塞阀物理连通并且被配置为控制柱塞阀在第一模式与第二模式之间的平移。致动可以包括通过可旋转螺纹杆、推/拉杆、缆线、杠杆、螺线管或活塞(可以是气动或液压的)进行的线性运动。
13.可以在结构与主体之间形成气密密封。
14.第二流体端口可以流体地联接到气体的流体源。气体可以是惰性气体,其包括稀有气体和分子气体中的一种或多种。
15.当处于第一模式下时,可以形成包括气密内部和阀腔的第一部分的第一流体体积。并且,当处于第二模式时,可以形成包括气密内部和阀腔的第二部分的第二流体体积,第二流体体积小于第一流体体积。
16.柱塞阀可以是固体材料体积或固体材料块,使得任何流体流动路径保持在柱塞阀的外部。
17.在其他总体方面,一种用于极紫外(euv)光源的目标装置包括:目标生成器,其包括贮液器和喷嘴结构,贮液器限定中空内部,该中空内部被配置为包含当处于等离子体状态时产生euv光的目标材料,该喷嘴结构限定与中空内部流动连通的开口;以及双模式阀设备,其气密地密封到贮液器。双模式阀设备包括:结构,限定阀腔和流体地联接到阀腔的三个流体端口,第一范围的第一流体端口流体地联接到真空泵,第二范围的第二流体端口流体地联接到流体源,第一范围的大小是第二范围的至少十倍,并且第三流体端口流体地联接到贮液器内部;以及单个柱塞阀,位于阀腔内并且被配置为在第一模式与第二模式之间移动而不打开贮液器内部。第一模式对应于真空模式,在真空模式下,柱塞阀打开,使得第一流体流动路径在贮液器内部与第一流体端口之间打开。第二模式对应于压力模式,在压力模式下,柱塞阀关闭,使得第二流体流动路径在贮液器内部与第二流体端口之间打开。
18.实现方式可以包括以下一个或多个特征。例如,当柱塞阀处于压力模式下时,中空内部可以保持在高于10兆帕(mpa)的压力。当柱塞阀处于压力模式时,贮液器的中空内部的压力可以大于外部的压力。
19.中空内部内的压力可以至少部分地由双模式阀设备的模式控制。
20.当柱塞阀处于第二模式下时,第一流体端口与中空内部可以被柱塞阀气密地隔开。
21.在其他总体方面,一种方法包括:使用在操作上隔离的两种控制模式中的一种来控制主体的气密内部中的流体状态,两种控制模式包括真空控制模式和高压控制模式。在真空控制模式下,以第一传导率从主体的气密内部传导流体,使得气密内部达到目标真空
压力。在高压控制模式下,以第二传导率向主体的气密内部中传导流体,使得气密内部达到高于大气压力的目标高压,第一传导率是第二传导率的至少两倍。该方法还包括在真空控制模式与高压控制模式之间切换,包括:使单个柱塞阀在与真空控制模式相对应的第一模式和与高压控制模式相对应的第二模式之间移动,在真空控制模式下柱塞阀打开,在高压控制模式下柱塞阀关闭并且形成密封。在整个切换过程中主体的气密内部被维持。
22.实现方式可以包括以下一个或多个特征。例如,该方法还可以包括,在当处于高压控制模式时以第二流动速率向主体的气密内部中传导流体之前,形成密封,从而将真空泵与气密内部隔开。通过将柱塞阀暴露于目标高压,可以当处于高压控制模式时以第二流动速率向主体的气密内部中传导流体。
23.目标真空压力可以低于101千帕(kpa),并且在切换到以第一传导率的真空控制模式之后,可以从主体的气密内部传导流体,使得主体的气密内部在不到四小时、不到一小时、不到15分钟或不到一分钟的时间内达到目标真空压力。
24.切换到真空控制模式可以包括打开柱塞阀并且形成第一流体体积,第一流体体积包括气密内部和柱塞阀所置于的阀腔的第一部分。切换到高压控制模式可以包括关闭柱塞阀并且形成第二流体体积,第二流体体积包括气密内部和阀腔的第二部分,第二流体体积小于第一流体体积。
25.在控制主体的气密内部中的流体状态之前,该方法可以包括将材料的固体块插入到主体的内部中并且密封内部以形成固体块所位于的气密内部。可以通过以下操作来控制主体的气密内部中的流体状态:当处于真空控制模式时,从气密内部传导包括一种或多种污染物的流体;并且如果气密内部之内的每种污染物的浓度低于相应的阈值浓度,则关闭柱塞阀以中断真空控制模式,熔化材料的固体块,并且在材料的固体块被熔化之后切换到高压控制模式。在高压控制模式期间,向气密内部中传导流体,直到气密内部中的压力上升到高于阈值压力,在阈值压力处,熔化的目标材料粘性地流出流体地联接到气密内部的开口。
26.该方法可以包括将柱塞阀偏置到第一状态。
27.该方法可以包括将柱塞阀偏置到第二状态。
28.第一传导率可以是第二传导率的至少五倍、至少十倍、至少五十倍或大约一百倍。
附图说明
29.图1a是流体控制设备的框图,该流体控制设备与主体的气密内部流体连通并用于控制该气密内部,该流体控制设备处于真空模式下;
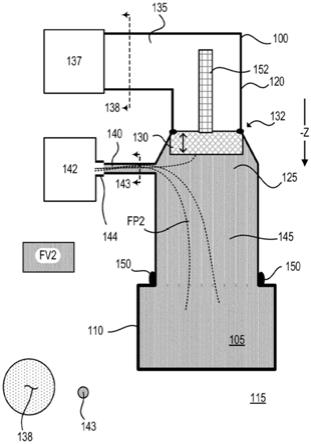
30.图1b是图1a的流体控制设备处于压力模式下的框图;
31.图1c是图1b的处于压力模式下的流体控制设备的柱塞阀的示意图,该柱塞阀安置于由图1a和图1b的流体控制设备的结构所限定的阀腔中并且可在其中移动;
32.图2a是在柱塞阀与图1b和图1c的流体控制设备的结构之间形成的面密封的实现方式的示意图;
33.图2b是在柱塞阀与图1b和图1c的流体控制设备的结构之间形成的锥形密封的实现方式的示意图;
34.图3a是图1a的流体控制设备处于真空模式下时的实现方式的截面图;
35.图3b是图3a的流体控制设备处于压力模式下时的实现方式的截面图;
36.图3c是图3b中的处于压力模式下的流体控制设备的柱塞阀的示意图,柱塞阀安置于由图3a和图3b的流体控制设备的结构所限定的阀腔中并且可在其中移动,并且示出了在柱塞阀和该结构之间形成的活塞孔(piston
‑
bore)式密封;
37.图4是极紫外(euv)光源的目标装置的框图,其中可以在目标装置中使用可以是图1a和图1b的流体控制设备的流体控制设备;
38.图5是使用图1a和图1b或图2a
‑
图3c的流体控制设备来控制主体的气密内部内的流体状态而执行的过程的流程图;
39.图6a
‑
图6f示出了控制图4的目标装置的贮液器(reservoir)的中空内部内的流体状态而执行的过程的步骤;以及
40.图7是从图4的euv光源接收euv光输出的光刻装置的实现方式的框图。
具体实施方式
41.参考图1a和图1b,流体控制设备100被配置为与限定在主体110内的气密内部105流体连通,并且用于控制气密内部105,气密内部105被有效地密封或与外部环境115隔离。双模式流体控制设备100在两种模式之间切换:打开模式和关闭模式,在打开模式下,流出气密内部105的相对较大的流体传导率是可能的,并且在关闭模式下,流入气密内部中105的相对较小的流体传导率是可能的。可以在将气密内部105维持在其气密隔离状态的同时执行切换。可传导入气密内部105中和传导出气密内部105的流体可以是气态或液态。
42.流体控制设备100包括限定阀腔125的结构120,单个柱塞阀130安置于阀腔125中并且是可移动的。因此,流体控制设备100仅仅使用仅一个柱塞阀130来执行本文描述的功能,从而降低了复杂性和成本。结构120限定流体地耦合到阀腔125的三个流体端口135、140、145。第一流体端口135被配置为流体地联接到真空泵137,第二流体端口140被配置为流体地联接到流体源142,并且第三流体端口145被配置为流体地联接到主体110的气密内部105。柱塞阀130位于阀腔125内,并且被配置为在第一模式与第二模式之间移动,同时维持主体110的气密内部105。
43.在图1a中示出的第一模式对应于真空模式,其中柱塞阀130处于打开状态,使得第一流体流动路径fp1在气密内部105与第一流体端口135之间打开,并且流体在真空泵137与气密内部105之间自由通过。例如,在第一模式下,流体从气密内部105到真空泵137自由通过。在图1b中示出的第二模式对应于压力模式,其中柱塞阀130处于关闭状态,使得第一流体端口135与气密内部105被柱塞阀130阻挡开,并且第二流体流动路径fp2在气密内部105与第二流体端口140之间打开。当柱塞阀130被密封到结构120时,柱塞阀130处于关闭状态或关闭,使得流体不能绕过柱塞阀130。
44.此外,当在第一模式下时,形成包括气密内部105和阀腔125的第一部分的第一流体体积fv1;而在第二模式下,形成包括气密内部105和阀腔125的第二且较小的部分的第二流体体积fv2。第一流体体积fv1包括第一流体端口135、阀腔125、第三流体端口145和气密内部105。第二流体体积fv2包括阀腔125、第二流体端口140、第三流体端口145和气密内部105。从图1a和图1b明显看出,第二流体体积fv2小于第一流体体积fv1。第二流体体积fv2不包括第一流体端口135。
45.结构120是合适刚性的固体结构,其能够维持低于大气压力的真空(当处于真空模式下时)和高于大气压力的高压(当处于压力模式下时)。在真空模式期间,气密内部105中还有阀腔125中维持的真空可以是高真空或超高真空,在高真空或超高真空中,分子流在第一流体流动路径fp1内和气密内部105内占主导地位。例如,在真空模式下,气密内部105内的压力可以维持或保持低于101千帕(kpa)。此外,在压力模式期间,气密内部105和阀腔125中维持的压力可以高于大气压力,或者可以高于10兆帕(mpa)。
46.因此,结构120(包括形成流体端口135、140、145的结构120的部分)应该由例如具有低或最小除气的材料(诸如不锈钢、铝、钛)制成。
47.柱塞阀130可控制以在两种模式之间移动,并且当在第二模式下时,柱塞阀130被密封到结构120的内壁121(图1c),从而防止流体流入到第一流体端口135中。柱塞阀130是实心体,使得所有可能的流体流动路径保持在柱塞阀130的主体外部,并且没有路径穿过柱塞阀130或在柱塞阀130内。另外,像结构120一样,柱塞阀130应该由刚性材料制成,该刚性材料能够承受小于大气压力的真空(当处于真空模式下时)和高于大气压力的高压(当处于压力模式下时),并且还具有低或最小的除气。例如,柱塞阀130可以由不锈钢、铝、钛制成。
48.柱塞阀130被配置为通过沿着在第一模式与第二模式之间延伸的方向133(由图1c中标记为133的箭头描绘)线性平移而在第一模式与第二模式之间移动。柱塞阀130可以沿其平移的方向133或者平行于+z方向,或者平行于
‑
z方向。此外,柱塞阀130可以被配置为在没有任何旋转运动的情况下执行这种平移。柱塞阀130在致动器152的控制下移动,致动器152维持柱塞阀130在阀腔125内的位置,并且还沿着方向133物理地平移柱塞阀。
49.如上所述,在第一模式下,流出气密内部105的相对较大的流体传导率是可能的。在第一模式下流出气密内部105的相对较大的流体传导率意味着通过第一流体端口135(其在第一模式下流体地联接到气密内部105)的流体传导率比通过第二流体端口140(其至少在第二模式下流体地联接到气密内部105)的流体传导率大得多。通过端口(诸如第一流体端口135和第二流体端口140)的流体传导率通常与该端口的横截面积成比例(并且可以成正比),其中横截面是沿着垂直于通过该端口的流体流动的大致方向的平面截取的。因此,第一流体端口135中的第一横截面积138比第二流体端口140的第二横截面积143大得多。在该示例中,第一流体端口135和第二流体端口140的横截面具有圆形形状,但是诸如例如多边形或非对称的其他形状也是可能的。
50.在一些实现方式中,第一横截面积138的大小是第二横截面积143的至少两倍;在其他实现方式中,第一横截面积138的大小是第二横截面积143的至少五倍;在另外的实现方式中,第一横截面积138的大小是第二横截面积143的至少十倍;在其他实现方式中,第一横截面积138的大小是第二横截面积143的至少五十倍。最后,在另外的实现方式中,第一横截面积138的大小是第二横截面积143的大约一百倍。
51.为了使流体控制设备100在第一模式与第二模式之间切换的期间维持主体110的气密内部105,结构120在结构120和主体110彼此附接的位置处与主体110形成气密密封150。气密密封150可以是可以承受真空模式期间存在的真空压力和高压模式期间存在的高压的任何密封。例如,气密密封150可以是结构120与主体110之间的垫圈密封,其中垫圈由诸如铜的软金属制成,并且夹住垫圈的、结构120与主体110的边缘具有刀口,从而在超高真空范围内维持完整性。
52.真空泵137可以是适于从气密内部105移除物质的任何真空泵,使得气密内部105内的压力足够快且充分地下降到低于阈值压力,以支持对气密内部105的操作要求。在阈值压力处于高真空或超高真空范围内的上述示例中,合适的真空泵137可以包括以下类型的一个或多个泵:涡轮分子泵、离子泵、钛升华泵、非蒸发吸气泵和/或低温泵。另外,真空泵137可以包括一对用在不同操作阶段的泵。例如,真空泵137还可以包括机械泵,该机械泵最初流体地联接到第一流体端口135以执行降至中间低压的第一次粗泵抽(rough pump)。
53.流体源142可以是包括流体地联接到第二流体端口140的输出端口144的罐(tank),并且闸阀(gate valve)或一些合适的流体控制阀可以定位在输出端口144中,以控制有多少流体被从流体源142引导到第二流体端口140。在一些实现方式中,即使在真空模式期间,输出端口144中的流体控制阀也保持打开,以便在真空模式期间向气密内部105提供某些流体。
54.由流体源142供应到气密内部105的流体可以是与使用气密内部105使用的应用相兼容的流体。由流体源142供应到气密内部105的流体可以是诸如惰性气体的气体,其可以包括稀有气体和分子气体中的一种或多种。例如,气体可以是氮气、氩气、氩气和氢气的混合物、氢气、或氦气。
55.如上所述,也如图1c所示,当柱塞阀130处于第二模式下并且关闭时(图1b),形成将真空泵137与气密内部105隔开的密封132,这种密封132通过压缩柱塞阀130与结构120的一个或多个壁(诸如结构120的变窄壁121)之间的弹性构件136(图1a)而形成。密封132由施加在柱塞阀130与结构120的变窄壁121之间的挤压力形成,结构120大体沿着
‑
z方向被引导远离气密内部105(由标记为134的箭头示出)。
56.此外,在该第二模式下,由于来自第二流体流动路径fp2中的流体的压力,柱塞阀130在面对气密内部105的一侧暴露于高于大气压力(并且可以显著高于大气压力)的压力。因此,从流体源142施加到柱塞阀130的压力向柱塞阀130施加附加力,该附加力取决于密封132的设计而增加沿着方向134的力,并且该附加力可以加强或维持柱塞阀130与结构120的壁之间的密封132和/或赋予将柱塞阀130维持在第二模式下和关闭的更大的力。
57.图1b和图1c所示的密封132以一般方式示出。在各种实现方式中,密封132可以是面密封、锥形密封或活塞孔式密封,或者对这些密封的任何修改。密封132需要能够承受柱塞阀132在两种操作模式之间的多次循环运动,而不需要更换弹性构件136。
58.参考图2a,在一些实现方式中,密封132是面密封232a。面密封232a是其中两个平行表面沿着密封方向(其平行于z方向)压缩弹性构件236a(垫圈)的密封,其中弹性构件236a安置于形成在柱塞阀230a的壁231a中的o形环槽中。具体地,弹性构件236a被压缩在结构220a的内壁221a与柱塞阀230a的壁231a(其是轴向面)之间。在该实现方式中,沿着方向134增加压力(由于来自流体源142的流体流动)压缩垫圈236a并增加密封232a的性能。垫圈232a的弹性材料可能需要受到保护,以免过度应变而可能导致密封232a的退化或失效。这种保护可以通过限制压缩的硬止动(hard stop)来提供,诸如使用形成在具有特定深度的壁231a中的o形环槽。另外,在该实现方式中,来自流体流动的附加力赋予将柱塞阀230a维持在第二模式下从而关闭的更大的力。
59.参考图2b,在其他实现方式中,密封132是锥形密封232b。在锥形密封232b中,柱塞阀230b被设计成在与内壁221b的锥形形状相匹配的壁231b处具有拔模角(draft angle)
(其在施加压力的一侧更大,从而面对流体端口145时更大)。弹性构件236b(其可以是垫圈)可以安置于形成在壁231b中的o形环槽中。在该实现方式中,沿着方向134增加压力(由于来自流体源142的流体流动)也压缩垫圈236b并且增加密封232b的性能。弹性构件232b的弹性材料可能需要受到保护,以免过度应变而可能导致密封232b退化或失效。这种保护可以通过限制压缩的硬止动来提供,诸如使用形成在具有特定深度的壁231b中的o形环槽。另外,在该实现方式中,来自流体流动的附加力赋予将柱塞阀230b维持在第二模式下从而关闭的更大的力。
60.参考图3a
‑
图3c,流体控制设备100的实现方式300包括安置于阀腔325中的柱塞阀330,阀腔325被限定在通过密封350而被气密地密封到主体110的结构320内。在该实现方式中,如图3c中更清楚地示出的,通过压缩柱塞阀330的壁331(其为径向侧壁)与结构320的内部圆柱形壁321之间的密封机构(其可以是弹性构件)336来形成密封332。密封332是活塞孔式密封的一部分,其中密封机构336径向地密封在柱塞阀330与内壁321之间。
61.结构320包括与相应的真空泵337、流体源342和气密内部105流体连通的三个端口335、340、345。如同流体控制设备100一样,柱塞阀330被配置为通过沿着方向133(由箭头描绘)平移而在两种模式之间移动,方向133在第一模式与第二模式之间延伸并且或者平行于+z方向或者平行于
‑
z方向。此外,柱塞阀330在没有任何旋转运动(即,围绕z方向的旋转运动)的情况下执行这种平移。
62.流体控制设备300还包括与柱塞阀330物理连通的致动器352,致动器352被配置为控制柱塞阀330沿着方向133在第一模式与第二模式之间的平移。致动器352的移动影响柱塞阀330的平移。致动器352在控制设备354的控制下移动,控制设备354可以是自动设备或手动设备。例如,控制设备354可以是人(手动)。作为另一示例,控制设备354可以是调节致动器352的位置的机电设备。致动器352可以是旋转时线性平移的可旋转螺纹杆、杠杆、推/拉杆、或缆线、螺线管或活塞(其可以是气动的或液压的)。通过安置在结构320的开口中,致动器352的运动可以沿着垂直于z方向的方向被约束或限制,并且致动器352与结构320的开口之间的这种界面包括密封353。密封353(在致动器352与结构320之间)和密封332(在柱塞阀330与结构320之间)的组合形成活塞孔式密封。
63.此外,致动器352可以被密封在将阀腔325与致动器352隔开的挡板356内。也就是说,阀腔325不包括挡板356内的体积。挡板356的一端附接到结构320,另一端附接到柱塞阀330。挡板356可以可选地通过例如抑制柱塞阀330的运动或偏置柱塞阀330来对柱塞阀330的运动提供一些控制。挡板356也可以用于抑制或防止旋转运动(即,围绕z方向的旋转运动),因为挡板356的一端固定到柱塞阀330,另一端固定到结构320。
64.在该实现方式中,柱塞阀330包括用于容纳(receive)密封机构336(诸如垫圈)的o形环槽,并且当柱塞阀330处于第二模式下时,该垫圈336被压在结构的壁321与柱塞阀330的侧壁331(标记在图3a和图3c中)之间,如图3b和图3c所示。
65.另外,在一些实现方式中,第二模式可以被配置为默认模式,在该模式下,柱塞阀330处于平衡(或稳定)位置。例如,柱塞阀330可以沿着方向134(远离气密内部105并且平行于
‑
z方向)被偏置,从而停留在将真空泵337从气密内部105密封的位置。在图3a和图3b中以框图形式示出了偏置设备358。偏置设备358可以被配置为将柱塞阀330维持在第二模式下(密封)。
66.在其他实现方式中,第一模式被配置为默认模式,在该模式下,柱塞阀330处于平衡位置。在这些实现方式中,偏置设备358将柱塞阀330偏置(或维持)在第一模式下。
67.偏置设备358可以是设定柱塞阀330的平衡位置的任何设备。例如,偏置设备358可以是能够存储能量的机械物体,诸如附接到柱塞阀330或致动器352的弹簧或活塞。弹簧的静止位置可以对应于柱塞阀330的平衡位置。
68.参考图4,在一些实现方式中,流体控制设备400(其可以是流体控制设备100或300)被用在极紫外光(euv)光源462的目标装置460中,euv光源462向输出装置466(其可以是光刻装置)供应euv光464。目标装置460包括用于保持或移动目标材料406的一个或多个流体装置。
69.在图4的实现方式中,目标装置460包括单个贮液器410。在其他实现方式中,对于目标装置460来说包括多个贮液器和用于存储流体的一个或多个罐是可能的。贮液器410基本上是压力控制的容器,目标材料406被放置在其中,并且此后由euv光源462使用。贮液器410可以由锻造钼或其他合适的低除气材料形成。
70.目标装置460包括限定中空内部405的贮液器410和限定开口470的喷嘴结构468,中空内部405被配置为包含当处于等离子体状态时产生euv光的目标材料,开口470与中空内部405流体连通并且开放到真空腔室的内部416中。目标装置460包括流体控制设备400,流体控制设备400被气密地密封到贮液器410。流体控制设备400被设计成类似于流体控制设备100、300,并且因此包括三个流体端口,第一流体端口流体地联接到真空泵437,第二流体端口流体地联接到流体源442,以及第三流体端口445流体地联接到贮液器内部405。流体控制设备400还包括单个柱塞阀420,单个柱塞阀420位于阀腔内并且被配置为在第一模式与第二模式之间移动而不打开贮液器内部405。贮液器410可以包括覆盖物或端口411,覆盖物或端口411是可移除的以使得新鲜的目标材料(以固体形式)能够被添加到内部405。当覆盖物或端口411被从贮液器410移除时,贮液器410的内部405暴露于环境415中可能存在的污染物和大气压力。
71.接下来描述euv光源462的方面。euv光源462包括相对于目标空间布置的euv集光器472,在该目标空间处,一个或多个辐射脉冲474与目标476相互作用,目标476在贮液器内部405内的压力的控制下被喷射出或被推出喷嘴结构468。euv集光器472收集从由辐射脉冲474与目标476的相互作用而形成的等离子体发出的euv光473。
72.每个目标476由目标材料(供应到贮液器内部405)制成。目标476通过它们与辐射脉冲474的相互作用至少部分转换成等离子体。目标476可以是液体或熔融金属的液滴、液流的一部分、固体颗粒或簇、包含在液滴内的固体颗粒、目标材料的泡沫、或包含在液流的一部分内的固体颗粒的形式。目标材料406可以包括例如水、锡、锂、氙或者当转换成等离子体状态时具有euv范围内的发射谱线的任何材料。例如,目标材料406可以是元素锡,其可以用作:纯锡(sn);诸如snbr4、snbr2、snh4的锡化合物;诸如锡
‑
镓合金、锡
‑
铟合金、锡
‑
铟
‑
镓合金、或这些合金的任意组合的锡合金。
73.在使用中,当柱塞阀420处于压力模式(图4所示的模式)下时,中空内部405可以维持在高于10兆帕(mpa)的压力。此外,当柱塞阀420处于压力模式下时(如图4所示),贮液器410的中空内部405内的压力大于真空腔室的内部416内的压力。以这种方式,目标476的流被挤出喷嘴结构468并且被朝向目标空间引导。
74.因为流体控制设备400对于两种操作模式(真空模式和高压模式)仅使用单个柱塞阀420,所以它可以被设计成具有更小的总体积,并且因此相对于空间有限的euv光源462中的贮液器410更容易布置。此外,因为流体控制设备400使用简单,并且具有流线型设计,所以器比提供真空模式和高压模式两者的现有系统更便宜、更轻且更容易维护。因为流体控制设备400在处于真空模式下时提供优异且高的流体传导率,所以流体控制设备400可以在目标装置460重启之后使用。在贮液器410的中空内部405已经向大气环境开放之后,发生目标装置460重启。通过打开贮液器410的中空内部405,中空内部405会被不需要的物质污染,并且在贮液器410的中空内部405能够再次开始操作(以向目标空间供应目标476)之前,中空内部405必须被去污染(de
‑
contaminate),这通常可以包括中空内部405的排空,并且这可以通过流体控制设备400来完成,该流体控制设备400能够以必然比现有系统更短的时间尺度来执行去污染。
75.参考图5,执行步骤580,以使用流体控制设备100控制主体110的气密内部105内的流体状态。参考图1的流体控制设备100,但是步骤580可以由流体控制设备300或400执行。每当气密内部105需要向环境开放时,步骤580可以中断。
76.步骤580包括使用在操作上隔离的两种控制模式中的一种来控制气密内部105中的流体状态(582)。两种控制模式包括第一模式(即真空控制模式(584))和第二模式(即高压控制模式(586))。在真空控制模式(584)下,以第一传导率从主体110的气密内部105传导流体,使得气密内部105达到目标真空压力p
tv
。目标真空压力p
tv
低于大气压力,并且因此低于约101.325千帕(kpa)。在高压控制模式(586)下,以第二传导率向主体110的气密内部中105传导流体,使得气密内部105达到目标高压p
th
。目标高压p
th
高于大气压力,并且因此高于约101.325千帕(kpa)。此外,如上所述,第一传导率(其通过第一流体端口135)大于(例如,其大小至少两倍于)第二传导率(其通过第二流体端口140)。
77.过程580包括在真空控制模式(584)与高压控制模式(586)之间切换。
78.如果当前操作是真空控制模式(584),则确定(588)该模式是否需要切换到高压控制模式(586)。例如,如果气密内部105内的压力已经达到目标真空压力p
tv
,则可以确定需要切换模式。作为另一示例,对于何时切换到高压控制模式(586)的确定(588)可以基于气密内部105的另一方面,诸如气密内部105内的物质浓度。关于是否切换到高压控制模式(586)的确定(588)可以由操作者或者由软件实现的步骤做出。确定(588)可以基于由与气密内部105相关联的传感器执行的测量,并且确定的结果可以是流体控制设备100的组件的致动,或者可以是向操作者显示或传达值。作为另一示例,对于何时切换到高压控制模式(586)的确定(588)可以基于控制信号,该控制信号例如通过去污染步骤已经结束的评估、高压操作准备开始的评估、或其他因素、或其组合来触发或发起。
79.如果模式不需要从真空控制模式(584)切换到高压控制模式(586)(588),则真空控制模式(584)继续。如果模式确实需要从真空控制模式(584)切换到高压控制模式(586)(588),则柱塞阀130从与真空控制模式(584)相对应的第一模式(其中柱塞阀130打开)移动到与高压控制模式(586)相对应的第二模式(其中柱塞阀130关闭并且形成密封132)(590)。例如,并且参考图3a和图3b,致动器352可以在控制设备354的控制下沿着z方向移动,并且致动器352的运动使得柱塞阀330沿着z方向移动。在该移动(590)期间,维持主体110的气密内部105。
80.形成(590)的密封132将真空泵137与气密内部105隔开。在高压控制模式(586)的操作期间,在从流体源142向气密内部中105传导流体之前,形成密封132(590)。此外,在向主体110的气密内部中105传导流体的同时,柱塞阀130暴露于更高的压力(并且最终在达到目标高压p
th
时暴露于目标高压p
th
)。
81.如果当前操作是高压控制模式(586),则存在关于模式是否需要切换到真空控制模式(584)的确定(592)。确定(592)可以由其他系统使用、需求和控制(诸如与气密内部105相关的)从外部驱动。例如,确定(592)可以在操作周期结束时或者在气密内部105发生压力泄漏的情况下发生。如果模式不需要从高压控制模式(586)切换到真空控制模式(584)(592),则高压控制模式(586)继续。如果模式确实需要从高压控制模式(586)切换到真空控制模式(584)(592),则柱塞阀130从与高压控制模式(586)对应的第二模式(其中柱塞阀130关闭)移动到与真空控制模式(584)相对应的第一模式(其中柱塞阀130打开)(594)。例如,参考图3a和图3b,致动器352可以在控制设备354的控制下沿着
‑
z方向移动,并且致动器352的运动使得柱塞阀330沿着
‑
z方向移动。在该移动(594)期间,维持主体110的气密内部105。
82.步骤580可以在主体110已经被密封以形成气密内部105之后开始(596)。在该开始状态下,在一些实现方式中,在真空控制模式(584)期间,气密内部105首先被泵抽降至目标真空压力p
tv
,以便移除气密内部105中由于其先前向环境开放而引起的任何污染物。
83.取决于气密内部105和主体110的设计,在切换到真空控制模式(584)之后或在开始(596)之后,从主体110的气密内部105传导流体,使得主体110的气密内部105在少于四小时、少于一小时、少于15分钟或少于一分钟内达到目标真空压力p
tv
。
84.因此,例如,参考图4的流体控制设备400,在中空内部405从环境415密封之后,步骤580开始以真空控制模式(584)操作。因为流体控制设备400包括具有比第二流体端口440大得多的传导率的第一流体端口435,所以有可能以相对快速的方式达到目标真空压力p
tv
,例如在几分钟或甚至不到一分钟内。
85.具体地,参考图6a
‑
图6f,在中空内部405从环境415密封之前,并且还在以真空控制模式操作(584)之前,在覆盖物411已经被移除之后,将目标材料406的固体块(solid mass)607插入到贮液器410的内部405中(图6a)。在该特定实现方式中,流体控制设备400集成在覆盖物411内,尽管对于流体控制设备400来说集成到贮液器410的壁中也是可能的。覆盖物411被替换(图6b),并且覆盖物411和流体控制设备400被密封到贮液器410以形成中空内部405。接下来,因为中空内部405先前向环境415开放,并且污染物可能存在于中空内部405内,所以步骤580是在使用真空泵437以真空控制模式584操作(图6c)的同时将包括一种或多种污染物的流体传导出中空内部405来控制中空内部405中的流体状态。
86.一旦中空内部405之内的每种污染物的浓度下降到低于相应的阈值浓度,则中断真空控制模式(584),关闭柱塞阀420(590)(图6d),并且熔化目标材料406的固体块607(图6e)。通过将流体从流体源442传导到中空内部405中,流体控制设备400在目标材料406已经被熔化之后以高压控制模式(586)操作(图6f)。一旦中空内部405内的压力上升到高于目标高压p
th
,熔化的目标材料406就粘性地流过喷嘴结构468的开口470并且进入真空腔室的内部416中。
87.参考图7,示出了光刻装置766的实现方式766。光刻装置766用曝光光束b曝光衬底(其可以被称为晶片)w。光刻装置766包括多个反射光学元件r1、r2、r3、掩模m和狭缝s,所有
这些都在外壳10中。外壳10是壳体、罐,或者能够支撑反射光学元件r1、r1、r2、掩模m和狭缝s的其他结构,并且还能够维持外壳10内的真空空间。
88.euv光464进入外壳10,并且被光学元件r1通过狭缝s朝向掩模m反射。狭缝s部分地限定用于在光刻工艺中扫描衬底w的分布式光的形状。输送到衬底w的剂量或输送到衬底w的光子数目取决于狭缝s的大小和狭缝s被扫描的速度。
89.掩模m还可以被称为掩模版或图案形成装置。掩模m包括表示将在衬底w上的光致抗蚀剂中形成的特征的空间图案。euv光464与掩模m相互作用。euv光364与掩模m之间的相互作用导致掩模m的图案被赋予到euv光464上以形成曝光束b。曝光束b穿过狭缝s并且被光学元件r2和r3引导到衬底w。衬底w与曝光束b之间的相互作用将掩模m的图案曝光到衬底w上,从而在衬底w处形成光致抗蚀剂特征。衬底w包括多个部分20(例如,管芯)。每个部分20在y
‑
z平面中的面积小于整个衬底w在y
‑
z平面中的面积。每个部分20可以被曝光束b曝光以包括掩模m的副本,使得每个部分20包括由掩模m上的图案指示的电子特征。
90.光刻装置766可以包括与euv光源462的控制装置(未示出)通信的光刻控制系统30。
91.本发明的其他方面在以下编号的条项中阐述。
92.1.一种双模式流体控制设备,包括:
93.结构,限定阀腔和流体地联接到阀腔的三个流体端口,第一流体端口被配置为流体地联接到真空泵,第二流体端口被配置为流体地联接到流体源,并且第三流体端口被配置为流体地联接到主体的气密内部;以及
94.单个柱塞阀,位于所述阀腔内并且被配置为在第一模式与第二模式之间移动,同时维持所述主体的所述气密内部;
95.其中所述第一模式对应于真空模式,在所述真空模式下,所述柱塞阀打开,使得第一流体流动路径在所述气密内部与所述第一流体端口之间打开,并且流体在所述第一流体端口与所述气密内部之间自由通过,并且所述第二模式对应于压力模式,在所述压力模式下,所述柱塞阀关闭,使得所述第一流体端口与所述气密内部被所述柱塞阀阻挡开,并且第二流体流动路径在所述气密内部与所述第二流体端口之间打开。
96.2.根据条项1所述的双模式流体控制设备,其中所述第一流体端口具有提供第一流体传导率的第一横截面积,并且所述第二流体端口具有提供第二流体传导率的第二横截面积,所述第一横截面积大于所述第二横截面积。
97.3.根据条项2所述的双模式流体控制设备,其中,所述第一横截面积的大小是所述第二横截面积的至少两倍、至少五倍、至少十倍、至少五十倍或大约一百倍。
98.4.根据条项1所述的双模式流体控制设备,其中,所述第二模式是默认模式,在所述默认模式下,所述柱塞阀处于其平衡位置。
99.5.根据条项4所述的双模式流体控制设备,还包括偏置设备,所述偏置设备与所述柱塞阀物理连通并且被配置为将所述柱塞阀偏置到所述第二模式。
100.6.根据条项1所述的双模式流体控制设备,其中,当所述柱塞阀处于第二模式下并且关闭时,形成将所述真空泵与所述气密内部隔开的密封,并且所述柱塞阀暴露于高于大气压力的压力。
101.7.根据条项6所述的双模式流体控制设备,其中,当所述柱塞阀由于从所述流体源
针对所述柱塞阀施加的压力而处于第二模式下时,所述密封加强或保持恒定。
102.8.根据条项1所述的双模式流体控制设备,其中,在所述真空模式下,所述气密内部的压力保持低于大气压力,并且在所述压力模式下,所述气密内部的压力保持高于大气压力。
103.9.根据条项1所述的双模式流体控制设备,其中,在所述真空模式下,所述气密内部内的压力保持在其中分子流在第一流体流动路径和所述气密内部内占主导地位的高真空或超高真空。
104.10.根据条项1所述的双模式流体控制设备,其中,在所述真空模式下,所述气密内部的压力被保持低于101千帕(kpa),并且在所述压力模式下,所述气密内部的压力被保持高于10兆帕(mpa)。
105.11.根据条项1所述的双模式流体控制设备,其中,当所述柱塞阀处于第一模式下时,流体从所述气密内部到所述真空泵自由通过。
106.12.根据条项1所述的双模式流体控制设备,其中,所述柱塞阀被配置为通过在所述第一模式与所述第二模式之间线性平移且不旋转来在所述第一模式与所述第二模式之间移动。
107.13.根据条项12所述的双模式流体控制设备,还包括致动器,所述致动器与所述柱塞阀物理连通并且被配置为控制所述柱塞阀在所述第一模式与所述第二模式之间的平移。
108.14.根据条项13所述的双模式流体控制设备,其中,所述致动器包括可旋转螺纹杆、推/拉杆、缆线、杠杆、活塞或螺线管。
109.15.根据条项1所述的双模式流体控制设备,其中,在所述结构和所述主体之间形成气密密封。
110.16.根据条项1所述的双模式流体控制设备,其中,所述第二流体端口流体地联接到气体的流体源。
111.17.根据条项16所述的双模式流体控制设备,其中,所述气体是惰性气体,其包括稀有气体和分子气体中的一种或多种。
112.18.根据条项1所述的双模式流体控制设备,其中:
113.当处于所述第一模式下时,形成包括所述气密内部和所述阀腔的第一部分的第一流体体积;以及
114.当处于所述第二模式下时,形成包括所述气密内部和所述阀腔的第二部分的第二流体体积,所述第二流体体积小于所述第一流体体积。
115.19.根据条项1所述的双模式流体控制设备,其中,所述柱塞阀是固体体积,使得任何流体流动路径保持在所述柱塞阀的外部。
116.20.一种用于极紫外(euv)光源的目标装置,该目标装置包括:
117.目标生成器,包括贮液器和喷嘴结构,所述贮液器限定中空内部,所述中空内部被配置为包含当处于等离子体状态时产生euv光的目标材料,所述喷嘴结构限定与所述中空内部流体连通的开口;以及
118.双模式阀设备,气密地密封到所述贮液器,所述双模式阀设备包括:
119.结构,限定阀腔和流体地联接到所述阀腔的三个流体端口,第一范围的第一流体端口流体地联接到真空泵,第二范围的第二流体端口流体地联接到流体源,所述第一范围
的尺寸是所述第二范围的至少十倍,并且第三流体端口流体地联接到所述贮液器内部;以及
120.单个柱塞阀,位于所述阀腔内并且被配置为在第一模式与第二模式之间移动而不打开所述贮液器内部,所述第一模式对应于真空模式,在所述真空模式下,所述柱塞阀打开,使得第一流体流动路径在所述贮液器内部与所述第一流体端口之间打开,所述第二模式对应于压力模式,在所述压力模式下,所述柱塞阀关闭,使得第二流体流动路径在所述贮液器内部与所述第二流体端口之间打开。
121.21.根据条项20所述的装置,其中,当所述柱塞阀处于压力模式下时,所述中空内部保持在高于10兆帕(mpa)的压力。
122.22.根据条项21所述的装置,其中,当所述柱塞阀处于所述压力模式下时,所述贮液器的所述中空内部内的压力大于外部的压力。
123.23.根据条项20所述的装置,其中,所述中空内部内的压力至少部分地由双模式阀设备的模式控制。
124.24.根据条项20所述的目标装置,其中当所述柱塞阀处于所述第二模式下时,所述第一流体端口与所述中空内部被所述柱塞阀气密地隔开。
125.25.一种方法,包括:
126.使用在操作上隔离的两种控制模式中的一种来控制主体的气密内部中的流体状态,所述两种控制模式包括真空控制模式和高压控制模式;
127.在所述真空控制模式下,以第一传导率从所述主体的所述气密内部传导流体,使得所述气密内部达到目标真空压力;
128.在所述高压控制模式下,以第二传导率向所述主体的所述气密内部中传导流体,使得所述气密内部达到高于大气压力的目标高压,所述第一传导率是所述第二传导率的至少两倍;以及
129.在所述真空控制模式和所述高压控制模式之间切换,包括:使单个柱塞阀在与所述真空控制模式相对应的第一模式和与所述高压控制模式相对应的第二模式之间移动,在所述真空控制模式下所述柱塞阀打开,在所述高压控制模式下所述柱塞阀关闭并且形成密封,其中在整个切换过程中所述主体的所述气密内部被维持。
130.26.根据条项25所述的方法,还包括,在当处于所述高压控制模式时以第二流动速率向所述主体的所述气密内部中传导流体之前,形成所述密封,从而将真空泵与所述气密内部隔开。
131.27.根据条项26所述的方法,其中,当处于所述高压控制模式时以所述第二流动速率向所述主体的所述气密内部中传导流体包括将所述柱塞阀暴露于目标高压。
132.28.根据条项25所述的方法,其中,所述目标真空压力低于101千帕(kpa),并且在切换到以第一传导率的所述真空控制模式之后,从所述主体的所述气密内部传导流体,使得所述主体的所述气密内部在少于四小时、少于一小时、少于15分钟或少于一分钟内达到所述目标真空压力。
133.29.根据条项25所述的方法,其中:
134.切换到所述真空控制模式包括打开所述柱塞阀并且形成第一流体体积,所述第一流体体积包括所述气密内部和所述柱塞阀所置于的阀腔的第一部分;以及
135.切换到所述高压控制模式包括关闭所述柱塞阀并且形成第二流体体积,所述第二流体体积包括所述气密内部和所述阀腔的第二部分,所述第二流体体积小于所述第一流体体积。
136.30.根据条项25所述的方法,其中,在控制所述主体的所述气密内部中的所述流体状态之前,将材料的固体块插入到所述主体的内部中并且密封所述内部以形成所述固体块所位于的所述气密内部,并且控制所述主体的所述气密内部中的所述流体状态包括:
137.在真空控制模式下,从所述气密内部传导包括一种或多种污染物的流体;
138.如果所述气密内部之内的每种污染物的浓度低于相应的阈值浓度,则关闭所述柱塞阀以中断所述真空控制模式,熔化所述材料的固体块,并且在所述材料的固体块被熔化之后切换到高压控制模式。
139.31.根据条项30所述的方法,其中,在所述高压控制模式期间,向所述气密内部中传导流体,直到所述气密内部中的压力上升到高于阈值压力,在所述阈值压力处,熔化的目标材料粘性地流出流体地联接到气密内部的开口。
140.32.根据条项25所述的方法,还包括将所述柱塞阀偏置到所述第二状态。
141.33.根据条项25所述的方法,其中,所述第一传导率是所述第二传导率的至少五倍、至少十倍、至少五十倍或大约一百倍。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1