一种微重力光流传感固定装置及其使用方法
1.本发明涉及无人机技术领域,尤其是一种微重力光流传感固定装置及其使用方法。
背景技术:
2.如何获得精确的、稳定传输的位置信息一直以来都是学术界、工业界、航海界、国防科工、农矿界等研究的热点。这些年来,随着全球卫星导航系统(gnss)出现并不断成熟,室外定位技术在精度和成本上都已经达到了实用的程度。但是在室内、地铁、山洞、电磁屏蔽等无法接收到卫星发送的定位信号的情况下,gnss系统将无法使用或会获得错误的数据。如仓储产品的位置检测,火灾中的室内消防员的位置检测,矿洞里工人的位置检测等,这一系列的迫切需求使得室内定位以及室内外融合定位技术成为非常紧迫的研究任务。
3.解决这个问题的其中一种办法为借助非惯性传感器测量单元进行辅助测量,如利用激光雷达、gps、光流传感器等多种传感器进行融合等,该方法近年来获得了较大发展,并取得大量的应用成果。尤其是光流传感技术,其在定点降落、悬停的应用场景已经能够达到小于10cm级的应用误差。
4.但是光流传感器在实际应用过程中有严格的高度和方向要求,光流传感器依靠竖直向下的摄像头对地面数据进行采样,再经过一系列算法从而获得无人机坐标位置。摄像头偏离竖直方向、在空间摆动、振动或者无规则旋转等都对光流传感器数据采集的准确性造成严重的影响。传统无人机使用的光流传感器均固定于机架上,会时刻随着无人机的振动、飞行、不稳定而发生变化,对其进行滤波处理会大幅增加cpu运行效率并增加能耗。
5.本技术提供了一种新型微重力光流传感固定装置,该装置能够使得光流传感器快速稳定在竖直位置,不会由于无人机的振动、旋转等改变光流传感器的摄像头方向,从而大幅减少后期滤波处理的复杂性,极大的提高了光流传感器数据采集的准确性和实时性。
技术实现要素:
6.本发明提出一种微重力光流传感固定装置及其使用方法,能在无人机或无人车运动时使光流传感器的探测方向快速稳定在竖直位置。
7.本发明采用以下技术方案。
8.一种微重力光流传感固定装置,所述光流传感器(4)与万向结构相连以形成具有较大惯量的组合体;当所述组合体以多根弹性的牵拉结构连接于外部安装结构处时,光流传感器位于组合体的底端。
9.所述万向结构为球状的万向轮(3);所述牵拉结构为轻质弹簧。
10.所述外部安装结构为下端具有探测口的球形外壳(1);当万向轮以三根轻质弹簧(2)连接于球形外壳内壁时,组合体位于球形外壳的探测口处,受微重力作用,光流传感器探测方向竖直朝向下方,可通过探测口采集数据。
11.所述球状的万向轮上部在经度面内设置有互成120
°
角度的三个固定小孔(5)用于
连接轻质弹簧;万向轮正下方设有用于连接光流传感器的固定结构。
12.所述三根轻质弹簧的规格相同,均为小于5克且长度范围在5
‑
10毫米内的弹簧。
13.所述球状的万向轮具有光滑的球壁;所述球形外壳以硬塑料成型。
14.所述球形外壳上部设有弹簧安装孔;球形外壳探测口为直径小于球形万向轮直径的圆孔。
15.一种微重力光流传感固定装置的使用方法,采用以上所述的微重力光流传感固定装置,其特征在于:所述方法用于无人机时,光流传感器与万向轮连接形成具有较大惯量的组合体,组合体位于球形外壳的底部且处于被轻质弹簧悬吊的状态;球形外壳固定于无人机的机架正下方;当无人机在飞行过程中产生振动或摆动时,组合体以自身惯量和万向轮上部连接的轻质弹簧弹力来减少姿态变化量,以提升组合体底部的光流传感器的探测方向准确性。
16.当组合体姿态变化使光流传感器产生摇摆时,组合体在自身重力和轻质弹簧弹力驱动下复位,使光流传感器的探测方向能快速复位至竖直方向。
17.本发明所述方案,通过把光流传感器与大质量的万向轮相连,来通过质量的增加形成具有较大静态惯量的组合体,从而在无人机颠簸时,组合体仍能以其较大的静态惯量来减少姿态变化,从而维持光流传感器探测方向稳定。
18.本发明所述方案,在无人机稳定飞行或静止情况下,由于微重力作用,带有光流传感器的万向轮将保持竖直位置,使得光流传感器的摄像头竖直向下对地面图像进行分析处理;而当无人机振动、旋转时,由于刚体力矩和动量矩效应,万向轮也会随着无人机在竖直方向摆动,但是,此时三根轻质弹簧将根据空间对称性原理,对万向轮振动幅度进行限制使其快速衰减,从而使得万向轮能快速收敛于竖直方向,其上的光流传感器也能快速准确获得地面图像数据。
19.本发明的优点在于:1.结构简单、成本低廉;2.装置反应灵敏,调节速度快;3.扩展性强,可以连接无人机、无人车等需要光流传感器定位的场景。
附图说明
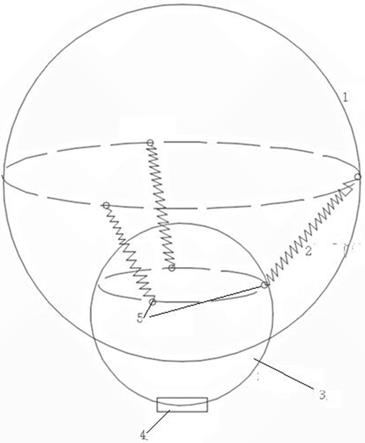
20.下面结合附图和具体实施方式对本发明进一步详细的说明:附图1是本发明的立体示意图;附图2是本发明的俯视向示意图;图中:1
‑
球形外壳;2
‑
轻质弹簧;3
‑
万向轮;4
‑
光流传感器;5
‑
固定小孔;6
‑
弹簧安装孔。
具体实施方式
21.如图所示,一种微重力光流传感固定装置,所述光流传感器4与万向结构相连以形成具有较大惯量的组合体;当所述组合体以多根弹性的牵拉结构连接于外部安装结构处时,光流传感器位于组合体的底端。
22.所述万向结构为球状的万向轮3;所述牵拉结构为轻质弹簧。
23.所述外部安装结构为下端具有探测口的球形外壳1;当万向轮以三根轻质弹簧2连接于球形外壳内壁时,组合体位于球形外壳的探测口处,受微重力作用,光流传感器探测方向竖直朝向下方,可通过探测口采集数据。
24.所述球状的万向轮上部在经度面内设置有互成120
°
角度的三个固定小孔5用于连接轻质弹簧;万向轮正下方设有用于连接光流传感器的固定结构。
25.所述三根轻质弹簧的规格相同,均为小于5克且长度范围在5
‑
10毫米内的弹簧。
26.所述球状的万向轮具有光滑的球壁;所述球形外壳以硬塑料成型。
27.所述球形外壳上部设有弹簧安装孔6;球形外壳探测口为直径小于球形万向轮直径的圆孔。
28.一种微重力光流传感固定装置的使用方法,采用以上所述的微重力光流传感固定装置,其特征在于:所述方法用于无人机时,光流传感器与万向轮连接形成具有较大惯量的组合体,组合体位于球形外壳的底部且处于被轻质弹簧悬吊的状态;球形外壳固定于无人机的机架正下方;当无人机在飞行过程中产生振动或摆动时,组合体以自身惯量和万向轮上部连接的轻质弹簧弹力来减少姿态变化量,以提升组合体底部的光流传感器的探测方向准确性。
29.当组合体姿态变化使光流传感器产生摇摆时,组合体在自身重力和轻质弹簧弹力驱动下复位,使光流传感器的探测方向能快速复位至竖直方向。
30.本例中,轻质弹簧的一端固定于万向轮的用于连接轻质弹簧的固定小孔处,另一端固定于球形外壳处理弹簧安装孔处,两端处的孔处均具有m8螺纹固定结构。
31.实施例:1、当无人机处于稳定飞行状况时,万向轮和光流传感器由于微重力作用将处于竖直向下位置,光流传感器的摄像头竖直向下拍摄地面图像,此时三根轻质弹簧处于自由伸长状态,没有弹性形变;2、当无人机准备定点悬停时,由于飞行姿态的改变,无人机将在一定区域内往复旋转、摆动、振动,这会导致光流传感器圆锥摆动使得摄像头无法准确获取地面图像数据,此时三个轻质弹簧根据摆动情况提供弹性阻力,再加上万向轮本身的微重力作用,就能够使得光流传感器在较长时间内、快速地、稳定地保持于竖直位置,从而准确获取地面图像数据。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1