一种动线圈式自驱动磁浮导轨装置及其控制方法
1.本发明属于高端装备技术领域,具体涉及一种动线圈式自驱动磁浮导轨装置及其控制方法。
背景技术:
2.相比较于传统的接触式导轨,气浮导轨是采用空气作为支撑的一种形式,工作过程中具有无接触磨损、无机械摩擦的优点,能够实现更高精度的定位运动,因此,直线电机+气浮导轨驱动形式目前被广泛应用于超精密运动系统中。但是,随着下一代高端装备朝高速化、精密化和模块化方向发展,而且需要具备真空工作环境,进一步,对直线导轨的高刚度、直线度以及多工作场景提出更高要求。而气浮导轨存在气隙调节滞后、面对外界干扰响应速度慢,难以保证导轨的高刚度与直线度,对机械加工精度要求高,且不能用于真空作业环境,因此,直线电机+气浮导轨的驱动形式已经不能满足需求。
3.磁悬浮导轨是通过控制电磁力的大小来实现物体稳定悬浮,它具有响应速度快、无摩擦、高刚度、功耗低、成本低以及洁净度高的优点。与传统的机械式直线导轨相比,磁悬浮导轨无机械接触,避免由于摩擦产生的磨损,提高寿命,降低维护成本;与气浮导轨相比,具有响应速度快,控制精度高、面对干扰,可主动进行间隙调节,具有刚度大、直线度好,且对高刚度具有良好的鲁棒性,能够适用于真空工作环境、高洁净度环境等场合的优点。因此高性能、高刚度的磁悬浮导轨以期优越性逐渐被应用于高端装备领域。
4.公开号为cn110524500a、公开日为2019年12月03日、名称为“磁浮导轨运动平台”的发明专利申请,对运动平台的机械结构以及安装方式进行了阐述,通过引入重力补偿装置对其他自由度的导轨进行悬浮支撑,实现运动平台的多自由度调整。磁悬浮导轨是精密运动台的核心组成部件,属于超精密传统部件,相比于磁浮运动平台,其应用场合更加多元化。
5.公开号为cn113059365a、公开日为2021年07月02日、名称为“一种侧挂式机床磁悬浮导轨”的发明专利申请,主要描述磁悬浮导轨在侧挂式机床上的机械结构和安装方式,保证机床运行精度的同时,解决了传统磁悬浮导轨纵向安装强度较差的问题。该发明专利申请中提及的磁悬浮导轨利用电磁铁之间的吸和力作为导轨的动力源,起驱动和导向作用,属于磁悬浮技术原理在特殊场景应用,不适合作为一种传动机构产品应用于高端装备技术领域。
6.公开号为cn111571242a、公开日为2020年08月25日、名称为“主动磁悬浮导轨平台及控制方法”的发明专利申请,借助磁悬浮技术,对导轨平台机械结构进行设计,实现磁浮导向和磁浮承载的目的。但依然存在以下不足:只在支撑方向布置传感器,滑箱两侧的悬浮间隙不可控,导轨的刚度和直线度无法得到保证;有限空间内承载电磁铁的支架强度难以保证,存在寿命短的问题。
技术实现要素:
7.本发明的目的在于提供一种动线圈式自驱动磁浮导轨装置及其控制方法,以解决现有高性能导轨不能自驱动、不能在真空环境作业、工作场合单一以及高刚度和直线度难以控制的问题。
8.本发明的动线圈式自驱动磁浮导轨装置为一种基于磁浮技术的超精密传动机构,在可以实现导轨自驱动的基础上,主动调节导轨间隙,在保证导轨具有高刚度和良好的直线度的同时,可以实现多自由度的微位移调节,能够满足目前超精密运动平台在结构、多工作场合以及运动性能等方面对直线导轨的需求。
9.为实现上述目的,本发明采取的技术方案如下:
10.一种动线圈式自驱动磁浮导轨装置,包括导套和导轴,所述导套套设在导轴上;所述导套包括线圈绕组、四个导套支撑框架及四个e形组件;所述导轴包括导轴支撑框架、永磁体及四个i型电磁铁;每个所述e形组件均包括双极电磁铁、初级线圈、感应线圈、电涡流传感器及两个霍尔元件;
11.所述四个导套支撑框架组合构成方形套,四个导套支撑框架的里侧面的中心处分别封装有e型组件,四个e型组件均沿导轴的长度方向设置,所述线圈绕组封装在位于上方的导套支撑框架的里侧面上,并位于e型组件的一侧;
12.所述导轴支撑框架为长方体形状,所述四个i型电磁铁分别封装在导轴支撑框架的上下左右四个侧面上,四个i型电磁铁与四个e型组件一一相对布置,所述永磁体封装在导轴支撑框架的上侧,并位于i型电磁铁的一侧,永磁体与线圈绕组相对布置;
13.所述双极电磁铁为e型,所述两个霍尔元件安装于双极电磁铁两级极面的中心处,所述感应线圈缠绕在双极电磁铁两级表面,所述初级线圈缠绕在双极电磁铁两级的感应线圈表面,并与感应线圈同心,所述电涡流传感器安装于双极电磁铁的中间齿的中心处。
14.一种利用动线圈式自驱动磁浮导轨装置实现动线圈式自驱动磁浮导轨的控制方法,所述控制方法如下:
15.通过调节封装在导套的上下两个导套支撑框架里侧面上的e型组件的两级初级线圈的电流大小,并使得电流大小不同,能够实现导套z自由度的调节;
16.通过调节封装在导套的左右两个导套支撑框架里侧面上的e型组件的两级初级线圈的电流大小,并使得电流大小不同,能够实现导套y自由度的调节;
17.通过调节封装在导套的上下两个导套支撑框架里侧面上的e型组件上的双极电磁铁的两级初级线圈的电流大小,能够实现导套ry自由度的调节;具体为:要求位于上方的两级初级线圈的电流大小不同,位于下方的两级初级线圈的电流大小不同,且位于上方的两级初级线圈的大电流级的大电流数值与位于下方的两级初级线圈的大电流级的大电流数值相同,位于上方的两级初级线圈的小电流级的小电流数值与位于下方的两级初级线圈的小电流级的小电流数值相同,位于上方的两级初级线圈的大电流级与位于下方的两级初级线圈的小电流级正对设置,位于上方的两级初级线圈的小电流级与位于下方的两级初级线圈的大电流级正对设置;
18.通过调节封装在导套的左右两个导套支撑框架里侧面上的e型组件上的双极电磁铁的两级初级线圈的电流大小,能够实现导套rz自由度的调节;具体为:
19.要求位于左侧的两级初级线圈的电流大小不同,位于右侧的两级初级线圈的电流
大小不同,且位于左侧的两级初级线圈的大电流级的大电流数值与位于右侧的两级初级线圈的大电流级的大电流数值相同,位于左侧的两级初级线圈的小电流级的小电流数值与位于右侧的两级初级线圈的小电流级的小电流数值相同,位于左侧的两级初级线圈的大电流级与位于右侧的两级初级线圈的小电流级正对设置,位于左侧的两级初级线圈的小电流级与位于右侧的两级初级线圈的大电流级正对设置。
20.本发明相对于现有技术的有益效果是:
21.本发明的一种动线圈式自驱动磁浮导轨装置,可以实现自驱动,结构简单紧凑,导轴的y自由度、z自由度、ry自由度和rz自由度可实现主动调节,对于高刚度具有良好的鲁棒性,不仅保证导轨的大刚度以及在x自由度上的直线度,而且在可变化行程内可以带动导套在多个自由度上进行微调整,因此可以用于多种场合。本发明的一种动线圈式自驱动磁浮导轨的控制方法,利用感应线圈和霍尔元件组合的方式对信号进行采集(高频感应线圈,低频霍尔元件),保证所采集信号的精确性和高效性,采用磁通反馈的方式对磁浮导套的悬浮间隙进行控制,可以提高磁浮导轨的控制精度,可以提升性能指标。本发明的动线圈式自驱动磁浮导轨装置应用于具有高定位精度、高响应速度、高刚度需求的超精密传动系统中。
附图说明
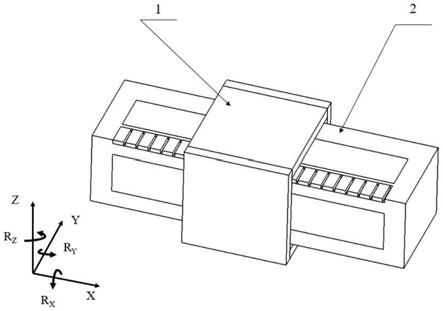
22.图1是本发明的一种动线圈式自驱动磁浮导轨装置的结构示意图;
23.图2是本发明的一种动线圈式自驱动磁浮导轨装置中的导套的结构示意图;
24.图3是图2的a
‑
a截面的剖视图;
25.图4是本发明的一种动线圈式自驱动磁浮导轨装置中的e型组件结构示意图;
26.图5是本发明的一种动线圈式自驱动磁浮导轨装置中的导轴结构示意图;
27.图6是本发明的一种动线圈式自驱动磁浮导轨的控制方法示意图。
28.图中:1
‑
导套;2
‑
导轴;1
‑1‑
第一导套支撑框架;1
‑2‑
第二导套支撑框架;1
‑3‑
第三导套支撑框架;1
‑4‑
第四导套支撑框架;1
‑5‑
e型组件;1
‑6‑
线圈绕组;1
‑5‑1‑
初级线圈;1
‑5‑2‑
感应线圈;1
‑5‑3‑
霍尔元件;1
‑5‑
4双极电磁铁;1
‑5‑5‑
电涡流传感器;2
‑1‑
导轴支撑框架;2
‑2‑
i型电磁铁;2
‑3‑
永磁体。
具体实施方式
29.下面结合附图对本发明的具体结构、工作过程和控制方法作进一步详细的说明:
30.具体实施方式一:结合图1
‑
图5说明,本实施方式披露了一种动线圈式自驱动磁浮导轨装置,包括导套1和导轴2,所述导套1套设在导轴2上;所述导套1包括线圈绕组1
‑
6、四个导套支撑框架及四个e形组件1
‑
5;所述导轴2包括导轴支撑框架2
‑
1、永磁体2
‑
3及四个i型电磁铁2
‑
2;每个所述e形组件1
‑
5均包括双极电磁铁1
‑5‑
4、初级线圈1
‑5‑
1、感应线圈1
‑5‑
2、电涡流传感器1
‑5‑
5及两个霍尔元件1
‑5‑
3;
31.所述四个导套支撑框架组合构成方形套,四个导套支撑框架的里侧面的中心处分别封装有e型组件(且对称布置),四个e型组件均沿导轴2的长度方向设置,所述线圈绕组1
‑
6封装在位于上方的导套支撑框架的里侧面上,并位于e型组件的一侧(线圈绕组1
‑
6关于导套支撑框架前后对称设置);
32.所述导轴支撑框架2
‑
1为长方体形状,所述四个i型电磁铁2
‑
2分别封装在导轴支
撑框架2
‑
1的上下左右四个侧面上(且对称布置),四个i型电磁铁2
‑
2与四个e型组件1
‑
5一一相对布置,所述永磁体2
‑
3封装在导轴支撑框架2
‑
1的上侧,并位于i型电磁铁2
‑
2的一侧,永磁体2
‑
3与线圈绕组1
‑
6相对布置;
33.所述双极电磁铁1
‑5‑
4为e型,所述两个霍尔元件1
‑5‑
3安装于双极电磁铁1
‑5‑
4两级极面的中心处,所述感应线圈1
‑5‑
2缠绕在双极电磁铁1
‑5‑
4两级表面,所述初级线圈1
‑5‑
1缠绕在双极电磁铁1
‑5‑
4两级的感应线圈1
‑5‑
2表面,并与感应线圈1
‑5‑
2同心,所述电涡流传感器1
‑5‑
5安装于双极电磁铁1
‑5‑
4的中间齿的中心处。
34.进一步的是,如图2、图3所示,所述四个导套支撑框架包括第一导套支撑框架1
‑
1、第二导套支撑框架1
‑
2、第三导套支撑框架1
‑
3和第四导套支撑框架1
‑
4,所述第一导套支撑框架1
‑
1和第三导套支撑框架1
‑
3上下相对布置,所述第二导套支撑框架1
‑
2和第四导套支撑框架1
‑
4左右相对布置,所述线圈绕组1
‑
6封装在第一导套支撑框架1
‑
1的里侧面上。
35.具体实施方式二:如图1
‑
图5所示,本实施方式是一种利用具体实施方式一所述的动线圈式自驱动磁浮导轨装置实现动线圈式自驱动磁浮导轨的控制方法,所述控制方法如下:
36.通过调节封装在导套1的上下两个导套支撑框架里侧面上的e型组件1
‑
5的两级初级线圈1
‑5‑
1的电流大小,并使得电流大小不同,能够实现导套1z自由度的调节(即通过调节封装在第一导套支撑框架1
‑
1以及第三导套支撑框架1
‑
3里侧面上的e型组件1
‑
5的初级线圈1
‑5‑
1的电流大小,能够实现导套1z自由度的调节。要求封装在第一导套支撑框架1
‑
1里侧面的两级初级线圈1
‑5‑
1的电流大小一致;封装在第三导套支撑框架1
‑
3里侧面的两级初级线圈1
‑5‑
1的电流大小一致);
37.通过调节封装在导套1的左右两个导套支撑框架里侧面上的e型组件1
‑
5的两级初级线圈1
‑5‑
1的电流大小,并使得电流大小不同,能够实现导套1y自由度的调节(即调节封装在第二导套支撑框架1
‑
2以及第四导套支撑框架1
‑
4里侧面上的e型组件1
‑
5的两级初级线圈1
‑5‑
1的电流大小,能够实现导套1y自由度的调节。要求封装在第二导套支撑框架1
‑
2里侧面的两级初级线圈1
‑5‑
1的电流大小一致;封装在第四导套支撑框架1
‑
4里侧面的两级初级线圈1
‑5‑
1的电流大小一致);
38.通过调节封装在导套1的上下两个导套支撑框架里侧面上的e型组件1
‑
5上的双极电磁铁1
‑5‑
4的两级初级线圈1
‑5‑
1的电流大小,能够实现导套1ry自由度的调节;具体为:要求位于上方的两级初级线圈1
‑5‑
1的电流大小不同,位于下方的两级初级线圈1
‑5‑
1的电流大小不同,且位于上方的两级初级线圈1
‑5‑
1的大电流级的大电流数值与位于下方的两级初级线圈1
‑5‑
1的大电流级的大电流数值相同,位于上方的两级初级线圈1
‑5‑
1的小电流级的小电流数值与位于下方的两级初级线圈1
‑5‑
1的小电流级的小电流数值相同,位于上方的两级初级线圈1
‑5‑
1的大电流级与位于下方的两级初级线圈1
‑5‑
1的小电流级正对设置,位于上方的两级初级线圈1
‑5‑
1的小电流级与位于下方的两级初级线圈1
‑5‑
1的大电流级正对设置;
39.通过调节封装在导套1的左右两个导套支撑框架里侧面上的e型组件1
‑
5上的双极电磁铁1
‑5‑
4的两级初级线圈1
‑5‑
1的电流大小,能够实现导套1rz自由度的调节;具体为:要求位于左侧的两级初级线圈1
‑5‑
1的电流大小不同,位于右侧的两级初级线圈1
‑5‑
1的电流大小不同,且位于左侧的两级初级线圈1
‑5‑
1的大电流级的大电流数值与位于右侧的两
级初级线圈1
‑5‑
1的大电流级的大电流数值相同,位于左侧的两级初级线圈1
‑5‑
1的小电流级的小电流数值与位于右侧的两级初级线圈1
‑5‑
1的小电流级的小电流数值相同,位于左侧的两级初级线圈1
‑5‑
1的大电流级与位于右侧的两级初级线圈1
‑5‑
1的小电流级正对设置,位于左侧的两级初级线圈1
‑5‑
1的小电流级与位于右侧的两级初级线圈1
‑5‑
1的大电流级正对设置。
40.进一步的是,如图1及图4所示,利用所述感应线圈1
‑5‑
2和霍尔元件1
‑5‑
3组合的方式对磁通信号进行采集,所述电涡流传感器1
‑5‑
5对悬浮间隙进行测量,采用磁通反馈的方式对磁浮导套1的悬浮间隙进行高精度控制。
41.进一步的是,利用光栅尺或激光干涉仪对导套1运动方向的信息进行采集,采用电流反馈方式对x自由度运动方向性能进行控制。
42.本发明的动线圈式自驱动磁浮导轨的控制方法,对位于轴套1上e形组件1
‑
5的初级线圈1
‑5‑
1进行通电,双极电磁铁1
‑5‑
4和i型电磁铁2
‑
2之间将产生吸和力,实现轴套1悬浮;对位于轴套1上的线圈绕组1
‑
6进行通电,线圈绕组1
‑
6通电后会产生可移动的行波磁场,行波磁场沿x自由度方向作直线运动,导轴2上永磁体2
‑
3产生的磁场与行波磁场相互作用产生牵引力,牵引力带动导套1沿行波方向在导轴2上沿x自由度作直线运动,实现磁浮导套的自驱动。
43.本发明的一种动线圈式自驱动磁浮导轨的控制方法,对位于导套1上的e形组件1
‑
5的双极电磁铁1
‑5‑
4的初级线圈1
‑5‑
1进行通电,双极电磁铁1
‑5‑
4和i型电磁铁2
‑
2之间将产生吸和力,通过调节导套1中的每个导套支撑框架上的e型组件1
‑
5的双极电磁铁1
‑5‑
4两级初级线圈1
‑5‑
1的电流大小,将实现对导套1的y自由度、z自由度、ry自由度和rz自由度的精确控制;对位于轴套1上的线圈绕组1
‑
6进行通电,线圈绕组1
‑
6通电后会产生可移动的行波磁场,行波磁场沿x自由度方向作直线运动,导轴2上永磁体2
‑
3产生的磁场与行波磁场相互作用产生牵引力,牵引力带动导套1沿行波方向在导轴2上沿x自由度作直线运动,综上所述,实现磁浮导套2的自驱动。
44.本发明提供的动线圈式自驱动磁浮导轨控制方法,对位于轴套1上e形组件1
‑
5里初级线圈1
‑5‑
1进行通电,双极电磁铁1
‑5‑
4和i型电磁铁2
‑
2之间将产生吸和力,实现轴套1悬浮;对位于轴套1上的线圈绕组1
‑
6进行通电,线圈绕组1
‑
6通电后会产生可移动的行波磁场,行波磁场沿x自由度方向作直线运动,导轴2上永磁体2
‑
3产生的磁场与行波磁场相互作用产生牵引力,牵引力带动轴套1沿行波方向在导轴上沿x自由度作直线运动,实现磁浮导套1的自驱动。
45.进一步的是,如图6所示,基于磁通反馈的方式对悬浮间隙进行调整,图中,φ
g,ref
表示期望的磁通量,φ
g
表示磁浮导轨系统输出的磁通量,s表示微分器,k
p
(g)为初级线圈增益,表示初级线圈输出电压与间隙相关的系数,k
s
(g)为感应线圈增益,表示感应线圈输出电压与间隙相关的系数,k
h
(g)为霍尔元件增益,表示霍尔元件输出电压与间隙相关的系数,u表示初级线圈输出电压,u
s
表示感应线圈输出电压,u
h
表示霍尔元件输出电压,c
s
表示感应线圈控制器,c
h
表示霍尔元件控制器,g表示控制对象,1/s表示积分器;本发明涉及的动线圈式自驱动磁浮导轨的控制方法由三个信号回路组成。其中,信号回路1为磁通前向控制通道,其信号流1为由期望的磁通量φ
g,ref
经过微分器s再经过初级线圈增益k
p
(g),输出电压u作用于控制对象g,并经过积分器1/s对其进行积分,获得磁浮导轨系统输出的磁通量
φ
g
,进而产生磁力来调整间隙;信号回路2为高频调节通道,其信号流2为期望的磁通量φ
g,ref
经过微分器s,再经过感应线圈增益k
s
(g),再通过感应线圈控制器c
s
输出电压u作用于控制对象g,并经过积分器1/s对其进行积分,获得磁浮导轨系统输出的磁通量φ
g
,与此同时,感应线圈内部形成反馈回路,信号流表示为:控制对象g的输出信号经过感应线圈增益k
s
(g)输出感应线圈电压u
s
,形成感应线圈内部的磁通反馈,该通道主要对高频信号起作用;信号回路3为低频磁通调节通道,其信号流为期望的磁通量φ
g,ref
经过霍尔元件增益k
h
(g)输出电压,再通过霍尔元件控制器c
h
输出电压u作用于控制对象g,并经过积分器1/s对其进行积分,获得磁浮导轨系统输出的磁通量φ
g
,与此同时,霍尔元件内部形成反馈回路,其信号流表示为:控制对象g的输出经过积分器1/s后流出的信号再次经过霍尔元件增益k
h
(g)输出霍尔元件电压u
h
,形成霍尔元件内部的反馈,该通道主要对低频信号进行处理;信号回路2和信号回路3共同构成了全频段的磁通反馈调节通道,为信号回路1的前向磁通控制提供全面的磁通信息,通过磁通控制可实现磁浮导轨磁浮力的精确调节,进而实现磁浮导套与导轴的间隙高精度实时控制,确保了磁浮导轨刚度的鲁棒性。
46.以上仅为本发明较佳的具体实施方式,但本发明的保护范围,并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1