一种五轴磁悬浮结构的制作方法
1.本发明涉及磁悬浮技术领域,尤其是涉及一种五轴磁悬浮结构。
背景技术:
2.磁悬浮蓄能飞轮是让转子轴悬浮在空中运转,以动能的方式储存能量;主要应用于电力调频、轨道交通、不间断电源或石油钻机等领域;
3.现有技术中的转子轴向采用磁轴承控制,径向采用机械轴承支撑;然而由于采用机械轴承支撑时,转子轴会与机械轴承直接接触,进而造成摩擦损耗比较大。
技术实现要素:
4.本发明的目的在于提供一种五轴磁悬浮结构,该五轴磁悬浮结构能够避免转子轴与支撑结构的接触,避免出现摩擦损耗比较大的情况;
5.本发明提供一种五轴磁悬浮结构,包括:
6.壳体及转子组件,转子组件穿设在壳体内,且转子组件的两端置于壳体两端的外侧;
7.第一支撑组件,用于进行转子组件一端径向控制,与壳体一端连接,且转子组件的一端设置在第一支撑组件内;
8.第二支撑组件,用于进行转子组件另一端径向控制,与壳体另一端连接,且转子组件的另一端穿设在第二支撑组件内;
9.第三支撑组件,用于进行转子组件轴向控制,设置在第二支撑组件上,且转子组件的另一端设置在第三支撑组件上。
10.作为进一步的技术方案,转子组件包括:
11.转子体,设置在壳体内,且一端设置在第一支撑组件内,另一端穿过第二支撑组件后设置在第三支撑组件内;
12.第一限位组,套设在转子体一端上;
13.第二限位组,套设在转子体另一端上。
14.作为进一步的技术方案,第一限位组包括:
15.依次设置在转子体一端上的第一保护环、第一压环、第一套筒和第二压环,且在第一套筒上套设有第一硅钢片,且第一压环和第二压环套设在第一套筒两端,第一压环和第二压环均与第一硅钢片相抵触。
16.作为进一步的技术方案,第二限位组包括:
17.依次设置在转子体另一端上的压盖、止推盘、轴向环、第二保护环、第三压环、第二套筒和第四压环,且第二套筒上套设有第二硅钢片,且第三压环和第四压环套设在第二套筒两端,第三压环和第四压环均与第二硅钢片相抵触。
18.作为进一步的技术方案,第一支撑组件包括:
19.第一端座,与壳体一端连接;
20.第一径向轴承组,设置在第一端座内,且转子组件的一端设置在第一径向轴承组内。
21.作为进一步的技术方案,第一径向轴承组包括:
22.定子组,设置在第一端座内,且定子组套设在转子组件一端;
23.信号组,与定子组连接,且信号组套设在转子组件上。
24.作为进一步的技术方案,定子组包括:
25.依次设置的第一压板、第一定子、第二定子和第二压板,且在第一定子和第二定子之间设置有固定架,并在固定架上设置有若干磁钢;
26.第一定子和第二定子内均设置有线圈。
27.作为进一步的技术方案,信号组包括:
28.隔磁板,设置在定子组上;
29.径向传感器,与隔磁板相邻设置,且在径向传感器上设置有pcb板。
30.作为进一步的技术方案,第二支撑组件包括:
31.第二端座,与壳体另一端连接;
32.第二径向轴承组,设置在第二端座内,且转子组件的另一端设置在第二径向轴承组内。
33.作为进一步的技术方案,第三支撑组件包括:
34.端盖,与第二支撑组件连接;
35.第三定子,设置在端盖内;且在第三定子上设置有绕组组件;
36.磁组件,设置在第三定子上;
37.感应组件,设置在端盖上。
38.本发明的技术方案通过将转子组件置于壳体内,通过第一支撑组件和第二支撑组件的配合对转子的径向进行控制,并通过第三支撑组件对转子组件的轴向进行控制,使得转子组件在壳体、第一支撑组件、第二支撑组件和第三支撑组件组成的空间内实现浮空;这样,转子组件在动作的过程中则不会与壳体、第一支撑组件、第二支撑组件和第三支撑组件直接接触,避免了摩擦的产生,进而能够有效的降低摩擦所带来的损耗,并能够使得本发明的技术方案输出效率得到提高。
附图说明
39.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
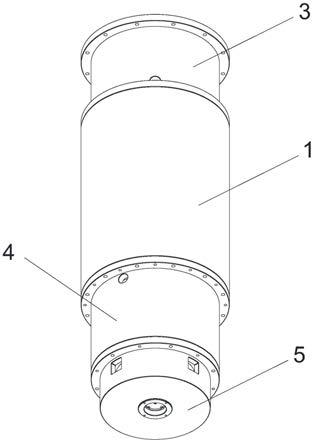
40.图1为本发明一种五轴磁悬浮结构的立体图;
41.图2为本发明一种五轴磁悬浮结构的结构示意图;
42.图3为图2中a
‑
a部分的剖视图;
43.图4为图3中x部分的结构放大示意图;
44.图5为图3中y部分的结构放大示意图。
45.附图标记说明:
[0046]1‑
壳体;
[0047]2‑
转子组件;21
‑
转子体;22
‑
第一限位组;221
‑
第一保护环;222
‑
第一压环;223
‑
第一套筒;224
‑
第二压环;225
‑
第一硅钢片;23
‑
第二限位组;231
‑
压盖;232
‑
止推盘;233
‑
轴向环;234
‑
第二保护环;235
‑
第三压环;236
‑
第二套筒;237
‑
第四压环;238
‑
第二硅钢片;
[0048]3‑
第一支撑组件;31
‑
第一端座;32
‑
第一径向轴承组;321
‑
定子组;3211
‑
第一压板;3212
‑
第一定子;3213
‑
第二定子;3214
‑
第二压板;3215
‑
固定架;3216
‑
磁钢;3217
‑
线圈;322
‑
信号组;3221
‑
隔磁板;3222
‑
pcb板;3223
‑
径向传感器;
[0049]4‑
第二支撑组件;41
‑
第二端座;42
‑
第二径向轴承组;
[0050]5‑
第三支撑组件;51
‑
端盖;52
‑
第三定子;53
‑
绕组组件;531
‑
骨架;532
‑
绕线组;54
‑
磁组件;541
‑
底板;542
‑
外圈;543
‑
内圈;544
‑
磁体;545
‑
限位板;55
‑
感应组件;551
‑
安装座;552
‑
探头;553
‑
固定座;554
‑
轴向传感器。
具体实施方式
[0051]
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0052]
在本发明的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"竖直"、"水平"、"顶"、"底"、"内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0053]
此外,术语"第一"、"第二"仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有"第一"、"第二"的特征可以明示或者隐含地包括一个或者更多个特征。在本发明的描述中,"多个"的含义是两个或两个以上,除非另有明确具体的限定。此外,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0054]
如图1
‑
5所示,本发明提出的一种五轴磁悬浮结构,包括:
[0055]
壳体1及转子组件2,转子组件2穿设在壳体1内,且转子组件2的两端置于壳体1两端的外侧;在运行的阶段,转子组件2在壳体1内旋转,产生能量供外部使用;第一支撑组件3与壳体1一端连接,且转子组件2的一端设置在第一支撑组件3内,通过第一支撑组件3进行转子组件2一端径向控制;第二支撑组件4与壳体1另一端连接,且转子组件2的另一端穿设在第二支撑组件4内,通过第二支撑组件4进行转子组件2另一端径向控制;第三支撑组件5设置在第二支撑组件4上,且转子组件2的另一端设置在第三支撑组件5上,通过第三支撑组件5进行转子组件2轴向控制;
[0056]
实际使用阶段,在第一支撑组件3和第二支撑组件4的配合下,转子组件2与第一支撑组件3和第二支撑组件4分离,并在第一支撑组件3和第二支撑组件4的控制下,使转子组
件2相对于第一支撑组件3和第二支撑组件4处于浮空的状态;而在第三支撑组件5的配合下,通过第三支撑组件5控制转子组件2轴向上的控制,使转子组件2相对于第三支撑组件5处于浮空的状态;通过上述结构使得转子组件2完全处于浮空的状态,使其与第一支撑组件3、第二支撑组件4和第三支撑组件5之间不进行接触,避免出现因摩擦造成损耗增加的问题。
[0057]
其中,转子组件2包括:转子体21、第一限位组22和第二限位组23,该转子体21设置在壳体1内,且一端设置在第一支撑组件3内,另一端穿过第二支撑组件4后设置在第三支撑组件5内;第一限位组22套设在转子体21一端上;第二限位组23套设在转子体21另一端上;
[0058]
通过第一限位组22和第二限位组23配合,将转子体21安装在第一支撑组件3、第二支撑组件4和第三支撑组件5内,进而避免第一支撑组件3、第二支撑组件4和第三支撑组件5直接与转子体21接触,影响转子体21的动作;具体的,
[0059]
第一限位组22包括,第一保护环221、第一压环222、第一套筒223、第二压环224和第一硅钢片225,该第一保护环221、第一压环222、第一套筒223和第二压环224依次设置在转子体21一端上;且在第一套筒223上套设有第一硅钢片225,另外,第一压环222和第二压环224套设在第一套筒223两端,第一压环222和第二压环224均与第一硅钢片225相抵触;
[0060]
具体的,第一套筒223套设在转子体21一端,且将第一硅钢片225套设在第一套筒223上,通过第一套筒223进行第一硅钢片225的支撑和塑型,通过第一套筒223来确保第一硅钢片225与转子体21的同轴度,另外,在本发明中,第一硅钢片225在使用时会获取第一支撑组件3的磁场力,进而使得处于第一套筒223内的转子体21处于浮空状态;且将第一压环222和第二压环224套设在第一套筒223上,并与第一硅钢片225相接触,通过第一压环222和第二压环224的配合,进而避免第一硅钢片225散片或变形;而第一保护环221设置在转子体21一端,且在第一保护环221安装后能够对第一套筒223和第一硅钢片225进行限位,防止第一套筒223和第一硅钢片225的轴向移动;
[0061]
第二限位组23包括压盖231、止推盘232、轴向环233、第二保护环234、第三压环235、第二套筒236、第四压环237和第二硅钢片238,该压盖231、止推盘232、轴向环233、第二保护环234、第三压环235、第二套筒236和第四压环237依次设置在转子体21另一端上;且第二套筒236上套设有第二硅钢片238;第三压环235和第四压环237套设在第二套筒236两端,第三压环235和第四压环237均与第二硅钢片238相抵触;
[0062]
具体的,第二套筒236套设在转子体21的另一端,且第二硅钢片238套设在第二套筒236上,而第三压环235和第四压环237均套设在第二套上,并置于第二硅钢片238两端,通过第三压环235和第四压环237的配合防止第而硅钢片238散片或变形;而在本发明中,通过第二套筒236进行第二硅钢片238的支撑和塑型,通过第二套筒236来确保第二硅钢片238与转子体21的同轴度,另外,在本发明中,第二硅钢片238在使用时会获取第二支撑组件4的磁场力,进而使得处于第二套筒236内的转子体21处于浮空状态;
[0063]
如图3或图4所示,第一支撑组件3包括:第一端座31和第一径向轴承组32,该第一端座31与壳体1一端连接;第一径向轴承组32设置在第一端座31内,且转子组件2的一端设置在第一径向轴承组32内;具体的,通过第一端座31与壳体1连接;
[0064]
其中,第一端座31上设置有深沟轴承,且该深沟轴承通过轴承压板进行固定,防止深沟轴承的轴向移动,具体的,轴承压板通过螺栓或螺钉与第一端座31连接,并将深沟轴承
固定在第一端座31与轴承压板之间;而在安装阶段,第一保护环221与深沟轴承抵触,能够在转子体21转动的过程中一方面进一步限制第一套筒223和第一硅钢片225的位置,另一方面避免第一套筒223和第一硅钢片225与第一端盖51接触;
[0065]
第一径向轴承组32包括定子组321和信号组322,该定子组321设置在第一端座31内,且定子组321套设在转子组件2一端,具体的,通过若干螺钉或螺栓依次穿过信号组322和定子组321后与第一端座31连接;信号组322与定子组321连接,且信号组322套设在转子组件2上;另外,定子组321套设在第一硅钢片225上,在运行的过程中会产生磁场力,并由第一硅钢片225获取磁场力后控制转子体21的一端处于浮空状态;而在此过程中通过信号组322获取转子体21的径向位置偏移状态,并给出相应的位置信号,并通过外部控制装置进行调整,进而实现转子体21的浮空,并根据信号组322的信号通过控制装置调整转子体21的浮空状态;其中,
[0066]
定子组321包括:第一压板3211、第一定子3212、第二定子3213和第二压板3214,第一压板3211、第一定子3212、第二定子3213和第二压板3214依次设置,且在第一定子3212和第二定子3213之间设置有固定架3215,并在固定架3215上设置有若干磁钢3216;另外,第一定子3212和第二定子3213内均设置有线圈3217;通过第一压板3211和第二压板3214进行第一定子3212、第二定子3213、固定架3215和若干磁钢3216的限位,并通过若干螺栓或螺钉穿过后固定在第一端盖51内,并防止定子组321整体在轴向移动;使用阶段,对定子组321进行通电,线圈3217获取电能后产生磁场力,并通过第一定子3212和第二定子3213增加产生的磁场力,而固定架3215上的若干磁钢3216同样会产生磁场力,配合线圈3217产生的磁场力来实现对转子体21一端的径向力进行控制;
[0067]
信号组322包括:隔磁板3221、pcb板3222和径向传感器3223,该隔磁板3221设置在定子组321上,径向传感器3223与隔磁板3221相邻设置,且径向传感器3223上设置有pcb板3222;通过隔磁板3221防止定子组321一侧产生的磁力对pcb板3222和径向传感器3223造成影响;径向传感器3223在通电后能够感应转子体21一端的偏移状态,并产生相应的位移信号,并发送到外部控制装置进行调整,进而实现转子体21一端的浮空;
[0068]
第二支撑组件4包括第二端座41和第二径向轴承组42,该第二端座41与壳体1另一端连接;第二径向轴承组42设置在第二端座41内,且转子组件2的另一端设置在第二径向轴承组42内;第二端座41的结构与第一端座31的结构相同,仅是在第二端座41上并未设置有深沟轴承和轴承压板,且转子体21的另一端穿过第二端座41后置于第三支撑组件5内;
[0069]
第三支撑组件5包括端盖51、第三定子52、绕组组件53、磁组件54和感应组件55,该端盖51与第二支撑组件4连接;第三定子52设置在端盖51内;且在第三定子52上设置有绕组组件53;磁组件54设置在第三定子52上;感应组件55设置在端盖51上;通过端盖51与第二端座41进行连接,并使得穿过第二端座41的转子体21两一端置于端盖51内的第三定子52与磁组件54组成的空间内;并在第三定子52、磁组件54的作用下控制转子体21另一端轴向上的位置,并通过感应组件55获取转子体21另一端的数据,并将获取的数据发送到外部控制装置,实现对转子体21另一端的浮空;其中,
[0070]
绕组组件53包括骨架531和绕线组532,第三定子52上设置有容置槽,而绕线组532缠绕在骨架531上,并与骨架531同时置于容置槽内;当绕线组532通电后绕线组会产生磁场力;
[0071]
磁组件54包括:底板541、外圈542、内圈543、磁体544和限位板545,该底板541固定在第三定子52上,且外圈542和内圈543均与底板541同轴设置,这样在外圈542和内圈543之间则形成了环槽,而磁体544设置在环槽内,在使用时,通过磁体544与绕线组532的配合使转子体21另一端浮空;限位板545通过螺栓或螺钉与底板541连接,并将外圈542、内圈543和磁体544固定在底板541和限位板545之间,并通过限位板545防止磁钢3216产生轴向位移,本发明中优选的磁体544为磁钢3216;
[0072]
感应组件55包括安装座551、探头552、固定座553和轴向传感器554,该安装座551设置在端盖51上的通孔内,形成安装基础,轴向传感器554设置在安装座551上,通过安装座551进行轴向传感器554的固定;固定座553设置在轴向传感器554上,且固定座553置于轴向传感器554邻近转子体21的一侧,并在固定座553上固定有探头552;通过探头552和轴向传感器554的配合检测转子体21轴向的位移,并根据检测结果生成位移信号,并发送到外部控制装置,在外部控制装置的控制下进行调整,使转子体21的另一端处于浮空状态;
[0073]
本发明的技术方案通过将转子组件2置于壳体1内,通过第一支撑组件3和第二支撑组件4的配合对转子的径向进行控制,并通过第三支撑组件5对转子组件2的轴向进行控制,使得转子组件2在壳体1、第一支撑组件3、第二支撑组件4和第三支撑组件5组成的空间内实现浮空;这样,转子组件2在动作的过程中则不会与壳体1、第一支撑组件3、第二支撑组件4和第三支撑组件5直接接触,避免了摩擦的产生,进而能够有效的降低摩擦所带来的损耗,并能够使得本发明的技术方案输出效率得到提高;
[0074]
另外,本发明的技术方案,可以使转子体21浮空旋转,机械损耗低,控制灵活,有效提高效率,在储能行业具有广阔的应用前景;另外,本发明的技术方案采用径向双控制和轴向单控制,并均采用线圈3217和磁钢3216混合控制的方式,能够使结构更紧凑空间小、磁力可控且运行安全、可靠。
[0075]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1