纯电变速箱的换挡控制方法、装置及纯电动汽车与流程
1.本技术涉及车辆技术领域,更具体地,涉及一种纯电变速箱的换挡控制方法、装置及纯电动汽车。
背景技术:
2.随着新能源汽车的大力推广,纯电动汽车也快速发展起来。纯电动汽车的电机所配的多挡变速箱的换挡模式和方法与传统燃油车有很大的不同,其取消了离合器,利用了电机进行快速调速,同时采用了滑动啮合套方式实现转速同步,可以减小换挡时间和同步装置的烧蚀风险,但是滑套换挡不可避免地带来了换挡冲击问题,并且一次换挡不成功的风险也比较大。
技术实现要素:
3.本技术提供一种纯电变速箱的换挡控制方法、装置及纯电动汽车,对滑动啮合套进行闭环控制,大大减小换挡时产生的扭矩冲击,并且增加量一次换挡的成功率。
4.本技术提供了一种纯电变速箱的换挡控制方法,包括:
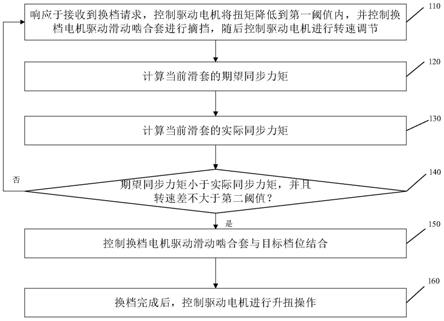
5.响应于接收到换挡请求,控制驱动电机将扭矩降低到第一阈值内,并控制换挡电机驱动滑动啮合套进行摘挡,随后控制驱动电机进行转速调节;
6.计算当前滑套的期望同步力矩;
7.计算当前滑套的实际同步力矩;
8.若期望同步力矩小于实际同步力矩,并且滑套的输入端和输出端的转速差不大于第二阈值,则控制换挡电机驱动滑动啮合套与目标挡位结合;
9.控制驱动电机进行升扭操作。
10.优选地,依据驱动电机的当前转速、滑套的输入端和输出端的转速、滑套的输入端的拖曳扭矩、当前挡位下驱动电机转换到滑套的输入端的总转动惯量以及同步时间计算当前滑套的期望同步力矩。
11.优选地,依据作用在同步器的齿套上的预设换挡力、滑套的所有摩擦锥面的平均工作半径、滑套的摩擦副的动摩擦系数以及滑套的摩擦锥角计算当前滑套的实际同步力矩。
12.优选地,控制换挡电机驱动滑动啮合套与目标挡位结合,包括:
13.依据换挡执行机构的初始位置计算换挡电机的最大转速;
14.控制换挡电机驱动滑动啮合套自换挡执行机构的初始位置移动至和目标挡位对应的位置,在移动过程中换挡电机的转速先升高至最大转速,然后在到达和目标挡位对应的位置时降低至零,同时调节换挡电机的扭矩,使得换挡执行机构到达和目标挡位对应的位置时换挡电机的扭矩不小于实际同步力矩,实现换挡。
15.本技术还提供一种纯电变速箱的换挡控制装置,包括驱动电机调节模块、期望同步力矩计算模块、实际同步力矩计算模块、判断模块、换挡模块以及升扭模块;
16.驱动电机调节模块用于响应于接收到换挡请求,控制驱动电机将扭矩降低到第一阈值内,并控制换挡电机驱动滑动啮合套进行摘挡,随后控制驱动电机进行调速;
17.期望同步力矩计算模块用于计算当前滑套的期望同步力矩;
18.实际同步力矩计算模块用于计算当前滑套的实际同步力矩;
19.判断模块用于判断期望同步力矩是否小于实际同步力矩,并且滑套的输入端和输出端的转速差是否不大于第二阈值;
20.换挡模块用于控制换挡电机驱动滑动啮合套与目标挡位结合;
21.升扭模块用于控制驱动电机进行升扭操作。
22.优选地,期望同步力矩计算模块用于依据驱动电机的当前转速、滑套的输入端和输出端的转速、滑套的输入端的拖曳扭矩、当前挡位下驱动电机转换到滑套的输入端的总转动惯量以及同步时间计算当前滑套的期望同步力矩。
23.优选地,实际同步力矩计算模块用于依据作用在同步器的齿套上的预设换挡力、滑套的所有摩擦锥面的平均工作半径、所有摩擦锥面的摩擦副的动摩擦系数以及滑套的摩擦锥角计算当前滑套的实际同步力矩。
24.优选地,换挡模块包括最大转速计算模块、滑动啮合套移动模块;
25.最大转速计算模块用于依据换挡执行机构的初始位置计算换挡电机的最大转速;
26.滑动啮合套移动模块用于控制换挡电机驱动滑动啮合套自换挡执行机构的初始位置移动至和目标挡位对应的位置,在移动过程中换挡电机的转速先升高至最大转速,然后在到达和目标挡位对应的位置时降低至零,同时调节换挡电机的扭矩,使得换挡执行机构到达和目标挡位对应的位置时换挡电机的扭矩不小于实际同步力矩,实现换挡。
27.本技术还提供一种纯电动汽车,包括变速器控制单元,变速器控制单元执行上述的纯电变速箱的换挡控制方法。
28.通过以下参照附图对本技术的示例性实施例的详细描述,本技术的其它特征及其优点将会变得清楚。
附图说明
29.被结合在说明书中并构成说明书的一部分的附图示出了本技术的实施例,并且连同其说明一起用于解释本技术的原理。
30.图1为本技术提供的纯电变速箱的换挡控制方法的流程图;
31.图2为本技术提供的纯电变速箱的换挡控制装置的结构图。
具体实施方式
32.现在将参照附图来详细描述本技术的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本技术的范围。
33.以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本技术及其应用或使用的任何限制。
34.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
35.在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
36.本技术提供一种纯电变速箱的换挡控制方法、装置及纯电动汽车,对滑动啮合套进行闭环控制,大大减小换挡时产生的扭矩冲击,并且增加量一次换挡的成功率。
37.实施例一
38.本技术提供了一种纯电变速箱的换挡控制方法,其适用于变速器控制单元(transmission control unit,tcu)。如图1所示,纯电变速箱的换挡控制方法包括如下步骤:
39.s110:响应于接收到换挡请求,控制驱动电机将扭矩降低到第一阈值内,并控制换挡电机驱动滑动啮合套进行摘挡,随后控制驱动电机进行转速调节。
40.s120:计算当前滑套的期望同步力矩t
s
。
41.具体地,依据驱动电机的当前转速ω
i
、滑套的输入端的转速ω
y1
(即与滑套的输入轴形成动力传递的滑套部件转速)、滑套的输出端的转速ω
y2
(即与滑套的输入轴形成动力传递的滑套部件转速)、滑套的输入端的拖曳扭矩t
t
(即转换至滑套输入端的变速箱的阻力矩,主要来自轴承阻力、齿轮搅油阻力和齿轮摩擦阻力)、当前挡位下驱动电机转换到滑套的输入端的总转动惯量j以及同步器的同步时间δ
t
计算当前滑套的期望同步力矩t
s
,即
[0042][0043]
其中,sign(x
‑
y)为符号函数,x
‑
y>0时取为+1,x
‑
y<0时取为
‑
1。
[0044]
s130:计算当前滑套的实际同步力矩t
s1
。
[0045]
具体地,依据作用在同步器的齿套上的预设换挡力f
t
、滑套的所有摩擦锥面的平均工作半径、滑套的摩擦副的动摩擦系数μ以及滑套的摩擦锥角α计算当前滑套的实际同步力矩t
s1
,即
[0046][0047]
其中,r
c
为第c个摩擦锥面的平均工作半径;
[0048]
n为滑套的摩擦锥面的数量。
[0049]
s140:判断期望同步力矩是否小于实际同步力矩,并且滑套的输入端和输出端的转速差是否不大于第二阈值,即t
s
≤t
s1
,并且δω≤ω。若是,则执行s150;否则,返回110。
[0050]
s150:控制换挡电机驱动滑动啮合套与目标挡位结合。
[0051]
具体地,控制换挡电机驱动滑动啮合套与目标挡位结合,包括:
[0052]
s1501:依据换挡执行机构的初始位置计算换挡电机的最大转速。
[0053]
具体地,tcu获取换挡执行机构的初始位置,计算依据换挡执行机构的初始位置与和目标挡位对应的位置之间的距离,作为换挡执行机构的行程,根据行程和电机特性,按照换挡电机先升速后降速的原则,计算出使得换挡执行机构以最快速度走完行程所需的换挡电机的最大转速。
[0054]
s1502:控制换挡电机驱动滑动啮合套自换挡执行机构的初始位置移动至和目标挡位对应的位置,在移动过程中换挡电机的转速先升高至最大转速,然后在到达和目标挡位对应的位置时降低至零,同时调节换挡电机的扭矩,使得换挡执行机构到达和目标挡位
对应的位置时换挡电机的扭矩不小于实际同步力矩(即t1≥t
s1
),实现换挡。
[0055]
在调节换挡电机的转速和扭矩后,若不满足上述t1≥t
s1
的条件,则控制换挡电机继续进行调扭,以达到所需条件。
[0056]
s160:换挡完成后,控制驱动电机进行升扭操作,使得变速箱在换挡后的挡位上正常运行。
[0057]
实施例二
[0058]
本技术还提供了一种纯电变速箱的换挡控制装置。如图2所示,换挡控制装置包括驱动电机调节模块210、期望同步力矩计算模块220、实际同步力矩计算模块230、判断模块240、换挡模块250以及升扭模块260。
[0059]
驱动电机调节模块210用于响应于接收到换挡请求,控制驱动电机将扭矩降低到第一阈值内,并控制换挡电机驱动滑动啮合套进行摘挡,随后控制驱动电机进行调速。
[0060]
期望同步力矩计算模块220用于计算当前滑套的期望同步力矩。
[0061]
实际同步力矩计算模块230用于计算当前滑套的实际同步力矩。
[0062]
判断模块240用于判断期望同步力矩是否小于实际同步力矩,并且滑套的输入端和输出端的转速差是否不大于第二阈值。
[0063]
换挡模块250用于控制换挡电机驱动滑动啮合套与目标挡位结合。
[0064]
升扭模块260用于控制驱动电机进行升扭操作。
[0065]
优选地,期望同步力矩计算模块220用于依据驱动电机的当前转速、滑套的输入端和输出端的转速、滑套的输入端的拖曳扭矩、当前挡位下驱动电机转换到滑套的输入端的总转动惯量以及同步时间计算当前滑套的期望同步力矩。
[0066]
优选地,实际同步力矩计算模块230用于依据作用在同步器的齿套上的预设换挡力、滑套的所有摩擦锥面的平均工作半径、所有摩擦锥面的摩擦副的动摩擦系数以及滑套的摩擦锥角计算当前滑套的实际同步力矩。
[0067]
优选地,换挡模块250包括最大转速计算模块2501、滑动啮合套移动模块2502。
[0068]
最大转速计算模块2501用于依据换挡执行机构的初始位置计算换挡电机的最大转速。
[0069]
滑动啮合套移动模块2502用于控制换挡电机驱动滑动啮合套自换挡执行机构的初始位置移动至和目标挡位对应的位置,在移动过程中换挡电机的转速先升高至最大转速,然后在到达和目标挡位对应的位置时降低至零,同时调节换挡电机的扭矩,使得换挡执行机构到达和目标挡位对应的位置时换挡电机的扭矩不小于实际同步力矩,实现换挡。
[0070]
实施例三
[0071]
本技术还提供了一种纯电动汽车,包括变速器控制单元,变速器控制单元执行上述的纯电变速箱的换挡控制方法。
[0072]
虽然已经通过例子对本技术的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上例子仅是为了进行说明,而不是为了限制本技术的范围。本领域的技术人员应该理解,可在不脱离本技术的范围和精神的情况下,对以上实施例进行修改。本技术的范围由所附权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1