双流传动变速系统的行驶模式和传动模式的控制方法
1.本发明涉及变速系统的控制领域,具体是一种用于双流传动变速系统的行驶模式与传动模式的控制方法。
背景技术:
2.随着时代进步与技术发展,工程机械与特种车辆等的应用领域越来越广泛,其应用环境也愈发复杂,人们对于此类机械与车辆的工作性能要求逐渐上升,更加注重驾驶安全性,舒适性以及运作效率。
3.现有的此类特种车辆为了能够更好的适应工作条件,大多档位设置较多,起步换档频繁,对驾驶员的操作要求较高。同时,多采用手动换挡的方式进行控制,自锁互锁通过零件自身的结构形成,容易在换档过程中出现不合理的控制情况。
技术实现要素:
4.本发明是为了解决上述现有技术存在的不足之处,提出一种双流传动系统的行驶模式和传动模式的控制方法,以期能根据不同行驶要求选择行驶模式,根据不同的工作环境选择合适的传动模式以及合适的机械档,从而使得车辆能够更好的适应工作环境,满足换档要求,保证驾驶安全性,舒适性以及运作效率。
5.本发明为解决技术问题采用如下技术方案:
6.本发明一种双流传动变速系统的行驶模式和传动模式的控制方法,所述行驶模式的档位包括空档、前进档和后退档,所述传动模式包括hmt模式、hst模式和mt模式,其特点在于,所述控制方法是按如下步骤进行:
7.步骤1、定义所述行驶模式和传动模式的标志位包括:hmtmode为传动模式标志位,tn_complete为空档标志位,td_complete为前进档标志位,tr_complete为后退档标志位,return12midpos_complete为1/2档同步器在中位标志位,return34midpos_complete为3/4档同步器在中位标志位,tdn_prepare为准备挂入的机械档位标志位,tdn_complete为挂入的机械档位标志位;
8.步骤2、根据双流传动变速系统的当前行驶模式档位所在的档位,选择相应的控制方法,若为空档,则执行空档控制方法;若为前进档,则执行前进档控制方法,若为后退档,则执行后退档控制方法。
9.本发明所述的双流传动变速系统的行驶模式和传动模式的控制方法的特点也在于,所述空档控制方法是按如下过程进行:
10.步骤a、将传动模式的标志位hmtmode置m,m表示hmt模式;
11.步骤b、若由前进档切换为空档,则令前进档的标志位td_complete复位,若由后退档切换为空档,则令后退档的标志位tn_complete复位;
12.步骤c、若机械档位为1档或2档,则令1/2档同步器回中位;若机械档位为3档或4档,则令3/4档同步器回中位;
13.步骤d、判断1/2档同步器以及3/4档同步器是否均在中位,若是,则执行步骤e;否则,返回步骤c;
14.步骤e、令空档的标志位tn_complete置位,令1/2档同步器在中位标志位return12midpos_complete和3/4档同步器在中位标志位return34midpos_complete复位,令准备挂入的机械档位标志位tdn_prepare和挂入的机械档位标志位tdn_complete复位。
15.所述前进档控制方法是按如下过程进行:
16.步骤a、若由空档切换为前进档,则前进档标志位td_complete=0,并执行步骤b;若在前进档行驶模式下切换机械档,则前进档标志位td_complete=1,并执行步骤d;
17.步骤b、将空档标志位tn_complete复位,前进档标志位td_complete置位;
18.步骤c、根据所选择的传动模式,将相应选择的传动模式的标志位hmtmode置位,其中,置h表示hst模式,置m表示hmt模式,置t表示mt模式;
19.步骤d、将准备挂入的档位标志位tdn_prepare置为所要挂入的机械档位;
20.步骤e、判断hmt离合器和hst离合器是否结合,若结合,则执行步骤f;反之,则执行步骤g;
21.步骤f、断开hst离合器和hmt离合器;
22.步骤g、若准备结合的机械档位为1档或2档,则判断3/4档同步器是否在中位,若在,则执行步骤i,否则执行步骤h;
23.若准备结合的机械档位为3档或4档,则判断1/2档同步器是否在中位,若在,则执行步骤i,否则执行步骤h;
24.步骤h、若准备结合的机械档位为1档或2档,则将3/4档同步器回中位;
25.若准备结合的机械档位为3档或4档,则将1/2档同步器回中位;
26.步骤i、根据准备挂入的档位标志位tdn_prepare,将机械档位挂入相应的档位;
27.步骤j、判断机械档位的挂档是否成功,若成功,则执行步骤l;反之,则执行步骤k;
28.步骤k、判断是否达到重新挂档次数,若未达到,则重新开始挂挡,并返回步骤j;反之,则提醒驾驶员挂档失败,并结束;
29.步骤l、根据步骤c置位的传动模式的标志位hmtmode,将hmt离合器或hst离合器与齿轮结合。
30.所述后退档控制方法是按如下过程进行:
31.步骤一、若由空档切换为后退档,则后退档标志位tr_complete=0,并执行步骤二;若在后退档行驶模式下切换机械档,则后退档标志位tr_complete=1,并执行步骤四;
32.步骤二、将传动模式标志位hmtmode置h,其中h表示hst模式;
33.步骤三、将空档标志位tn_complete复位,后退档标志位tr_complete置位;
34.步骤四、将准备挂入的档位标志位tdn_prepare置为所要挂入的机械档位;
35.步骤五、判断hmt离合器和hst离合器是否结合,若结合,则执行步骤六;反之,则执行步骤七;
36.步骤六、断开hst离合器和hmt离合器;
37.步骤七、若准备结合的机械档位为1档或2档,则判断3/4档同步器是否在中位,若不在中位,则执行步骤八,反之则执行步骤九;
38.若准备结合的机械档位为3档或4档,则判断1/2档同步器是否在中位,若不在中
位,则执行步骤八,反之则执行步骤九;
39.步骤八、若准备结合的机械档位为1档或2档,则将3/4档同步器回中位;
40.若准备结合机械档位为3档或4档,则将1/2档同步器回中位;
41.步骤九、根据准备挂入的档位标志位tdn_prepare,将机械档位挂入相应档位;
42.步骤十、判断挂档是否成功,若成功,则执行步骤十二;反之,则执行步骤十一;
43.步骤十一、判断是否达到重新挂档次数,若未达到,则重新开始挂挡,并返回步骤十;反之,则提醒驾驶员挂档失败,并结束;
44.步骤十二、hst离合器与齿轮结合。
45.与已有技术相比,本发明有益效果体现在:
46.1、本发明设有自动重新挂档模块,通过自动重新挂档模块,机械档位可以更快更好的结合,同时也可协助驾驶者判断机械档挂档单元是否出现故障。
47.2、本发明通过标志位的设定,形成了机械档位之间的互锁逻辑,无需通过零件结构来形成互锁,互锁的形成更加可靠。
附图说明
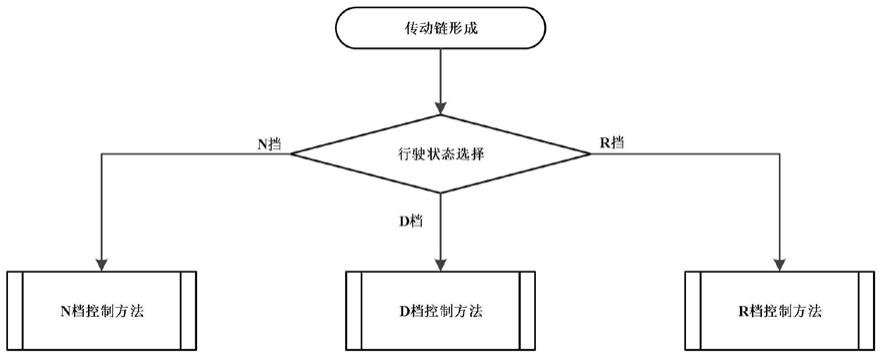
48.图1为传动路径形成的总的控制方法;
49.图2为行驶模式为n时的控制方法;
50.图3为行驶模式为d时的控制方法;
51.图4为行驶模式为r时的控制方法;
52.图5为双流传动变速器结构原理图;
53.图中标号:a、b、c、d、e为传动轴,l2为hmt离合器,l3为hst离合器,1、2为锥齿轮,3、4、8、9为直齿轮,5为行星架,6为齿圈,7为太阳轮,12、16为一档啮合齿轮,13、17为二档啮合齿轮,10、14为三档啮合齿轮,11、15为四档啮合齿轮。
具体实施方式
54.本实施例中,一种双流传动变速系统的行驶模式和传动模式的控制方法,能根据不同行驶要求选择行驶模式,根据不同的工作环境选择合适的传动模式,以及合适的机械档位,通过标志位的设立可以进行状态查询以及机械档位之间的互锁,按照传动路径形成时序:选择传动模式——选择机械档位——结合离合器,阐明了不同行驶模式下,hst、hmt和mt传动模式下机械档位1~4档挂档起步和换档控制策略。具体的说,如图1所示,该控制方法如下:
55.首先,定义行驶模式和传动模式的标志位包括:hmtmode为传动模式标志位,tn_complete为空档标志位,td_complete为前进档标志位,tr_complete为后退档标志位,return12midpos_complete为1/2档同步器在中位标志位,return34midpos_complete为3/4档同步器在中位标志位,tdn_prepare为准备挂入的机械档位标志位,tdn_complete为挂入的机械档位标志位;
56.然后,需要对车辆的行驶模式进行选择,即n档(空档)、d档(前进档)还是r档(后退档)。根据双流传动变速系统的当前行驶模式档位所在的档位,选择相应的控制方法,若为空档,则执行空档控制方法;若为前进档,则执行前进档控制方法,若为后退档,则执行后退
档控制方法。
57.请参阅图2,本实施例中,n档行驶状态下控制方法如下:
58.步骤a、空档时传动模式为默认传动模式,默认传动模式为hmt模式,所以将传动模式的标志位hmtmode置m,其中,m表示hmt模式。
59.步骤b、若由前进档切换为空档,则令前进档的标志位td_complete复位,若由后退档切换为空档,则令后退档的标志位tn_complete复位。
60.步骤c、接下来需要进行同步器回中位操作,切换为n档前的机械档位若为1档或2档,则令1/2档同步器回中位;机械档位若为3档或4档,则令3/4档同步器回中位;
61.步骤d、再通过三头霍尔档位传感器判断1/2档同步器以及3/4档同步器是否均在中位,若在,则令空档的标志位tn_complete置位,令1/2档同步器在中位标志位return12midpos_complete和3/4档同步器在中位标志位return34midpos_complete复位,令准备挂入的机械档位标志位tdn_prepare和挂入的机械档位标志位tdn_complete复位;
62.若不在,则继续将1/2档同步器或3/4档同步器回中位,直至1/2档同步器和3/4档同步器均在中位后再执行后续操作。
63.请参阅图3,本实施例中,d档行驶状态下控制方法如下:
64.若由空档切换为前进档,则前进档标志位td_complete=0,将空档标志位tn_complete复位,前进档标志位td_complete置位。之后进行传动模式的选择,根据所选择的传动模式,将相应选择的传动模式的标志位hmtmode置位,其中,置h表示hst模式,置m表示hmt模式,置t表示mt模式。通过机械档按钮选择机械档位,按下所需要挂入的机械档位按钮,将准备挂入的档位标志位tdn_prepare置为所要挂入的机械档位;
65.若在前进档行驶模式下切换机械档,则前进档标志位td_complete=1,新的机械档按钮的按下输入了一个准备挂入相应机械档位的信号,将准备挂入的档位标志位tdn_prepare置为所要挂入的机械档位。机械档位的选择完成后,判断hmt离合器和hst离合器是否结合,若结合,则断开hst离合器和hmt离合器;若未结合,则通过三头霍尔档位传感器判断准备结合的机械档位为1档或2档,3/4档同步器是否在中位,若准备结合的机械档位为3档或4档,1/2档同步器是否在中位若在,若在中位,则根据准备挂入的档位标志位tdn_prepare,将机械档位挂入相应的档位,否则,若准备结合的机械档位为1档或2档,则将3/4档同步器回中位,若准备结合的机械档位为3档或4档,则将1/2档同步器回中位;再根据准备挂入的档位标志位tdn_prepare,将机械档位挂入相应的档位;挂档操作进行后需要判断机械档位的挂档是否成功,若成功,则根据传动模式的标志位hmtmode,选择将hmt离合器或hst离合器与齿轮结合;反之,则判断是否达到重新挂档次数,若未达到,则重新开始挂挡,直至挂档成功后进行后续操作;反之,则提醒驾驶员挂档失败,并结束;
66.请参阅图4,本施例中,档行驶状态下控制方法如下:
67.若由空档切换为后退档,则后退档标志位tr_complete=0,只有在hst传动模式下才存在后退的行驶模式,所以将传动模式标志位hmtmode置h,其中h表示hst模式。将空档标志位tn_complete复位,后退档标志位tr_complete置位,通过机械档按钮选择机械档位,按下所需要挂入的机械档位按钮,将准备挂入的档位标志位tdn_prepare置为所要挂入的机械档位;若在后退档行驶模式下切换机械档,则后退档标志位tr_complete=1,新的机械档按钮的按下输入了一个准备挂入相应机械档位的信号,将准备挂入的档位标志位tdn_
prepare置为所要挂入的机械档位。机械档位的选择完成后,判断hmt离合器和hst离合器是否结合,若结合,则断开hst离合器和hmt离合器;若未结合,则通过三头霍尔档位传感器判断若准备结合的机械档位为1档或2档,3/4档同步器是否在中位,若准备结合的机械档位为3档或4档,1/2档同步器是否在中位,若在中位,则根据准备挂入的档位标志位tdn_prepare,将机械档位挂入相应的档位,否则若准备结合的机械档位为1档或2档,则将3/4档同步器回中位,若准备结合的机械档位为3档或4档,则将1/2档同步器回中位,再根据准备挂入的档位标志位tdn_prepare,将机械档位挂入相应的档位;挂档操作进行后需要判断机械档位的挂档是否成功,若成功,则hst离合器与齿轮结合;反之,则判断是否达到重新挂档次数,若未达到,则重新开始挂挡,直至挂档成功后进行后续操作;反之,则提醒驾驶员挂档失败,并结束;
68.请参阅图5,本实施例中,一种用于新型双流传动变速系统的结构包括:
69.起步时车辆阻力较大,采用机械档起步会使车辆熄火,而液压传动可以进行低速大扭矩传动,所以采用hst模式进行起步。hst模式的传动路径为:发动机动力由轴a传递给锥齿轮1,锥齿轮1与锥齿轮2通过齿轮副连接,将动力传递给轴b,变排量液压泵将轴b的机械能转换为液压能,液压马达将液压能转化为机械能,带动轴c工作。hmt离合器l2分离,hst离合器l3与齿轮4连接,齿轮4与行星架5固定连接,轴c与太阳轮7固定连接,通过行星轮系,动力传递给齿圈6,齿圈6与齿轮8固定连接,由齿轮副8/9将动力传递给轴d,根据所选择的机械档位齿轮的结合将动力传递给轴e(一档:齿轮12/16,二档:齿轮13/17,三档:齿轮10/14,四档:齿轮11/15)。
70.纯液压传动模式相较于机械传动模式传动效率较低,为了保证车辆的作业效率,所以由hst模式过渡至hmt模式,hmt模式的传动路径为:发动机动力由轴a传递给锥齿轮1,锥齿轮1与锥齿轮2通过齿轮副连接,将动力传递给轴b,变排量液压泵将轴b的机械能转换为液压能,液压马达将液压能转化为机械能,带动轴c工作,轴c与太阳轮7固定连接。hst离合器l3分离,hmt离合器l2与齿轮3结合,通过齿轮副3/4将动力传递给行星架5,动力在行星轮系处汇流,并传递给齿圈6,由齿轮副8/9将动力传递给轴d,根据所选择的机械档位齿轮的结合将动力传递给轴e。
71.纯机械传动的效率最高,当作业情况较为稳定时,可将传动模式从hmt模式向纯机械mt模式切换,mt模式的传动路径为:发动机动力由轴a传递给锥齿轮1,锥齿轮1与锥齿轮2通过齿轮副连接,将动力传递给轴b,变排量液压泵或液压马达锁止,太阳轮7静止。hst离合器l3分离,hmt离合器l2与齿轮3结合,通过齿轮副3/4将动力传递给行星架5,通过行星轮系将动力传递给齿圈6,由齿轮副8/9将动力传递给轴d,根据所选择的机械档位齿轮的结合将动力传递给轴e。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1