一种车辆的控制方法、装置和车辆与流程
1.本发明实施例涉及车辆技术领域,尤其涉及一种车辆的控制方法、装置和车辆。
背景技术:
2.目前,电控机械式自动变速箱(automated mechanical transmission,amt)无需驾驶员换挡,大幅降低劳动强度,还可以节省油耗,所以车辆匹配amt越来越普遍。其中amt有个节油功能,即空挡滑行功能,当驾驶员松开油门踏板时,经过允许的时间,变速箱通过控制离合器,变速箱至于空挡,降低了传动系统传递的阻力,让整车的滑行的距离更远,从而达到节油的目的。当驾驶员踩踏油门时,变速箱会快速结合离合器换入相应的档位。
3.然而,当amt匹配国六柴油机带有柴油机颗粒捕集器(diesel particulate filter,dpf)后处理部件时,会出现一种行车再生工况。就是当dpf部件中积碳到一定程度时,需要再生点内部的积碳,dpf再生时内部温度很高,要尽量避免发动机突然回到怠速,突然怠速会导致废气流量突然降低,尾气中的氧气含量突然增加,dpf中的碳会急剧氧化,造成dpf内部最大温度和最大温度梯度均会大幅增加,严重影响dpf再生的可靠性,甚至导致dpf烧毁。
4.目前,无法避免行车再生过程中突然的空挡滑行导致dpf损坏的风险。
技术实现要素:
5.有鉴于此,本发明实施例提供一种车辆的控制方法、装置和车辆,以解决车辆在柴油机颗粒捕集器处于行车再生时,难以避免空挡滑行造成柴油机颗粒捕集器的损坏的问题。
6.第一方面,本发明实施例提供一种车辆的控制方法,所述车辆包括自动变速箱控制单元,其中,所述车辆空挡滑行控制方法包括以下步骤:
7.获取柴油机颗粒捕集器的运行状态参数,并根据所述柴油机颗粒捕集器的运行状态参数判断所述柴油机颗粒捕集器是否处于行车再生;
8.若检测到所述柴油机颗粒捕集器处于行车再生,获取所述柴油机颗粒捕集器的剩余碳载量,并判断所述柴油机颗粒捕集器的剩余碳载量是否小于或等于第一预设值;
9.若检测到所述柴油机颗粒捕集器的剩余碳载量小于或等于第一预设碳载量,生成第一使能信号给所述自动变速箱控制单元,以使所述自动变速箱控制单元控制所述车辆空挡滑行。
10.第二方面,本发明实施例提供一种车辆的控制装置,所述车辆包括自动变速箱控制单元,所述车辆的控制装置包括:
11.行车再生判断模块,用于获取柴油机颗粒捕集器的运行状态参数,并根据所述柴油机颗粒捕集器的运行状态参数判断所述柴油机颗粒捕集器是否处于行车再生;
12.碳载量检测模块,用于若所述柴油机颗粒捕集器处于行车再生,获取所述柴油机颗粒捕集器的剩余碳载量,并判断所述柴油机颗粒捕集器的剩余碳载量是否小于或等于第
一预设值;
13.使能控制模块,用于若所述柴油机颗粒捕集器的剩余碳载量小于或等于第一预设值,生成第一使能信号给所述自动变速箱控制单元,以使所述自动变速箱控制单元控制所述车辆空挡滑行。
14.第三方面,本发明实施例提供一种车辆,包括如上所述的车辆的控制装置。
15.本发明实施例,通过获取柴油机颗粒捕集器的运行状态参数来判断柴油机颗粒捕集器是否处于行车再生,当柴油机颗粒捕集器处于行车再生时,获取柴油机颗粒捕集器的剩余碳载量,并将其与第一预设值进行比较,判断剩余碳载量是否小于第一预设值,以防止在柴油机颗粒捕集器处于行车再生时,若柴油机颗粒捕集器的剩余碳载量太高,发动机突然回到怠速对柴油机颗粒捕集器造成损坏,只有在柴油机颗粒捕集器的剩余碳载量满足小于第一预设值时,生成第一使能信号并发给自动变速箱控制单元,以使自动变速箱控制单元控制所述车辆空挡滑行,如此,保证在柴油机颗粒捕集器处于形成再生时,不会由于空挡滑行功能对柴油机颗粒捕集器造成损坏,保证车辆的可靠和安全行驶。
附图说明
16.图1为本发明实施例提供的一种不同载碳量主动再生时进入dpi最高温度随时间的变化曲线示意图;
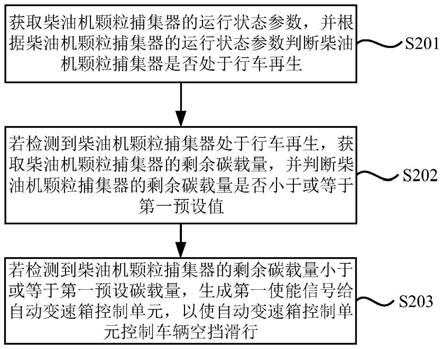
17.图2为本发明实施例提供的一种车辆的控制方法的流程图;
18.图3为本发明实施例提供的另一种车辆的控制方法的流程图;
19.图4为本发明实施例提供的又一种车辆的控制方法的流程图;
20.图5为本发明实施例提供的一种amt空挡滑行控制策略的流程图;
21.图6为本发明实施例提供一种车辆的控制装置的结构示意图;
22.图7为本发明实施例提供的另一种车辆的控制装置的结构示意图。
具体实施方式
23.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
24.dpf再生指随着dpf中捕集的颗粒物(即碳载量)的不断积累,引起发动机排气被压升高,车辆燃油经济性恶化,严重会导致dpf堵塞,因此需要对集满的dpf进行再生,以恢复其捕集颗粒的功能。dpf再生期间如果发生发动机转速降低至怠速(drop to idle,dpi),dpf再生内部的碳会发生迅速的剧烈燃烧,导致dpf内部最大温度和最大温度梯度产生峰值,可能会导致dpf烧毁,严重影响dpf的可靠性,图1本发明实施例提供的一种不同载碳量主动再生时进入dpi最高温度随时间的变化曲线示意图,示出了不同碳载量下主动再生时进入dpi工况时,dpf内部的变化情况,可以看出,当进行dti时,温度急剧增加。
25.行车再生属于主动再生的一种情况,即车辆在行驶过程中进行dpf再生,如此,amt空挡滑行时发动机转速就降低至怠速,针对amt空挡滑行的控制功能,此时,需要考虑dpf的行车再生水平,以确保dpf行车再生的安全性。
26.图2为本发明实施例提供的一种车辆的控制方法的流程图,如图2所示,该车辆包
括自动变速箱控制单元(transmission control unit,tcu),其特征在于,车辆空挡滑行控制方法包括以下步骤:
27.s201、获取柴油机颗粒捕集器的运行状态参数,并根据柴油机颗粒捕集器的运行状态参数判断柴油机颗粒捕集器是否处于行车再生。
28.具体的,车辆在行驶过程中,电子控制单元(electronic control unit,ecu)会实时检测dpf捕集到的碳载量,当达到预设限值时,将会触发dpf进行再生,如此称之为行车再生,其中,触发行车再生的碳载量的预设限值例如是5g/l。进一步的,dpf工作在不同状态下,会对应不同的运行状态参数,例如,当dpf处于行车再生状态时,其对应的运行状态参数为1,如此,若获取到的dpf的运行状态参数为1,则判断dpf处于行车再生。
29.s202、若检测到柴油机颗粒捕集器处于行车再生,获取柴油机颗粒捕集器的剩余碳载量,并判断柴油机颗粒捕集器的剩余碳载量是否小于或等于第一预设值。
30.其中,dpf在行车再生时,ecu通过获取dpf捕集积累的碳载量的速率与再生过程消耗的碳载量的速率进行运算,得到两者之间的差值即为dpf的剩余碳载量,示例性的,捕集积累的碳载量的速率为8g/l,再生过程消耗的碳载量的速率为6g/l,那么dpf的剩余碳载量就是2g/l。
31.具体的,当dpf处于行车再生时,ecu对dpf的剩余碳载量进行实时检测,并与第一预设值进行比较,以获知当前dpf行车再生的水平,若剩余碳载量小于或等于第一预设值,则判定当前dpf行车再生水平良好,此时,若驾驶员驾驶车辆进行空挡滑行,发动机突然降低至怠速,由于dpf内部的剩余碳载量较少,碳在发生剧烈燃烧产生的高温不会对dpf本身造成损坏,并且通过空挡滑行可以达到节省油耗的效果。
32.需要说明的是,第一预设值的设定可根据dpf的实际情况设定,具体数值本发明实施例不做特殊限定,优选的,第一预设值略小于dpf安全工作的最大碳载量,保证dpf行车再生时,发动机突然降低至怠速不会对dpf造成损坏。
33.s203、若检测到柴油机颗粒捕集器的剩余碳载量小于或等于第一预设碳载量,生成第一使能信号给自动变速箱控制单元,以使自动变速箱控制单元控制车辆空挡滑行。
34.具体的,ecu在检测到dpf的剩余碳载量小于或等于第一预设碳载量,生成第一使能信号给到tcu,tcu根据接收到的第一使能信号执行相应的空挡滑行控制策略,进而实现控制车辆进行空挡滑行,达到节省油耗的效果。
35.需要说明的是,第一使能信号可以是数字信号,在tcu中,还可以包括车辆非空挡滑行情况下的其他控制策略,例如换挡行驶控制策略,tcu根据接收到的使能信号的不通过,来选择执行相应的控制策略,以控制车辆行驶。
36.本发明实施例中,通过获取柴油机颗粒捕集器的运行状态参数来判断柴油机颗粒捕集器是否处于行车再生,当柴油机颗粒捕集器处于行车再生时,获取柴油机颗粒捕集器的剩余碳载量,并将其与第一预设值进行比较,判断剩余碳载量是否小于第一预设值,以防止在柴油机颗粒捕集器处于行车再生时,若柴油机颗粒捕集器的剩余碳载量太高,发动机突然回到怠速对柴油机颗粒捕集器造成损坏,只有在柴油机颗粒捕集器的剩余碳载量满足小于第一预设值时,生成第一使能信号并发给自动变速箱控制单元,以使自动变速箱控制单元控制车辆空挡滑行,如此,保证在柴油机颗粒捕集器处于形成再生时,不会由于空挡滑行功能对柴油机颗粒捕集器造成损坏,保证车辆的可靠和安全行驶。
37.可选的,根据柴油机颗粒捕集器的运行状态参数判断柴油机颗粒捕集器是否处于行车再生,包括:将柴油机颗粒捕集器的运行状态参数与第一预设状态参数进行比较,其中,第一预设状态参数表示柴油机颗粒捕集器处于行车再生;若检测到柴油机颗粒捕集器的运行状态参数等于第一预设状态参数,判定柴油机颗粒捕集器处于行车再生。
38.具体的,第一预设状态参数可以是ecu内部设定的任意值,本发明实施例对此不做特殊限定,例如第一预设状态参数为1,当ecu获取到的dpf的运行状态参数为1,即等于第一预设状态参数,则判定dpf处于行车再生。ecu通过将获取到的dpf的运行状态参数与内部设定的第一预设状态参数进行比较,并在dpf的运行状态参数等于第一预设状态参数时判定dpf处于行车再生,进一步保证控制系统的可靠性和稳定性。
39.可选的,图3为本发明实施例提供的另一种车辆的控制方法的流程图,如图3所示,主要包括以下步骤:
40.s301、获取车辆的变速箱信息,并根据变速箱信息判断车辆的变速箱是否为电控机械式自动变速箱;若判定车辆的变速箱为电控机械式自动变速箱,继续执行获取柴油机颗粒捕集器的运行状态参数的操作。
41.具体的,车辆的变速箱信息可以包括变速箱的运行参数和类型等,目前,车辆常用的变速箱类型可以分为电控机械式自动变速箱(amt)和机械式变速箱(mechanical transmission,mt),其中,mt也指手动变速箱,ecu通过获取到变速箱的信息,可以获知当前车辆匹配的变速箱类型,并判断该车辆的变速箱是否为amt,如果该车辆匹配的变速箱是mt,则ecu执行mt对应的dpf再生控制策略,如果该车辆匹配的变速箱是amt,则ecu执行如下步骤s302,获取dpf的运行状态参数,并判定dpf是否处于行车再生。如此,通过根据车辆的变速箱信息判定车辆的变速箱是否匹配amt,并在确定车辆的变速箱为amt时才执行后续的操作,保证车辆针对不同类型变速箱具有不同的dpf控制策略,更加可靠安全。
42.可选的,变速箱信息至少包括变速箱类型,便于ecu快速判断当前车辆匹配的变速箱类型,简化了控制算法。
43.s302、获取柴油机颗粒捕集器的运行状态参数,并根据柴油机颗粒捕集器的运行状态参数判断柴油机颗粒捕集器是否处于行车再生。
44.s303、若检测到柴油机颗粒捕集器处于行车再生,获取柴油机颗粒捕集器的剩余碳载量,并判断柴油机颗粒捕集器的剩余碳载量是否小于或等于第一预设值。
45.s304、若检测到柴油机颗粒捕集器的剩余碳载量小于或等于第一预设碳载量,生成第一使能信号给自动变速箱控制单元,以使自动变速箱控制单元控制车辆空挡滑行。
46.本实施例中,ecu在对dpf的运行状态进行检测之前,先要判断车辆的变速箱是否为amt,如此,保证只有车辆匹配的变速箱为amt才可以执行后续的控制策略,提高车辆运行的可靠性和安全性。
47.可选的,图4为本发明实施例提供的又一种车辆的控制方法的流程图,如图4所示,主要包括以下步骤:
48.s401、获取柴油机颗粒捕集器的运行状态参数,并根据柴油机颗粒捕集器的运行状态参数判断柴油机颗粒捕集器是否处于行车再生。
49.s402、若检测到柴油机颗粒捕集器处于行车再生,获取柴油机颗粒捕集器的剩余碳载量,并判断柴油机颗粒捕集器的剩余碳载量是否小于或等于第一预设值。
50.s403、若检测到柴油机颗粒捕集器的剩余碳载量小于或等于第一预设碳载量,生成第一使能信号给自动变速箱控制单元,以使自动变速箱控制单元控制车辆空挡滑行。
51.s404、若检测到柴油机颗粒捕集器的剩余碳载量大于第一预设碳载量,生成第二使能信号给自动变速箱控制单元,以使自动变速箱控制单元控制车辆降挡行驶或者保持当前挡位行驶。
52.具体的,在dpf处于行车再生时,ecu将获取的dpf的剩余碳载量与第一预设碳载量,如果dpf的剩余碳载量大于第一预设碳载量,生成第二使能信号给到tcu,tcu根据接收到的第二使能信号执行相应的控制策略,例如控制车辆进行降挡行驶或者保持当前的挡位不变进行行驶,如此,避免dpf不会因为发动机的突然怠速而发生烧毁,进一步保证车辆的安全驾驶。
53.需要说明的是,第二使能信号与第一使能信号不能为同一信号,但是两者可以是互补的信号,例如第一使能信号是高电平,第二使能信号是低电平,本发明实施例对此不做限定。
54.结合一具体实例,对上述实施例进行进一步解释说明,图5为本发明实施例提供的一种amt空挡滑行控制策略的流程图,如图5所示,主要包括以下步骤:
55.s501、获取车辆的变速箱信息。
56.s502、根据变速箱信息判断车辆的变速箱是否为电控机械式自动变速箱。
57.s503、若判定车辆的变速箱为机械式自动变速箱,获取柴油机颗粒捕集器的运行状态参数。
58.s504、判断颗粒捕集器的运行状态参数是否等于第一预设状态参数。
59.具体的,设置第一预设状态参数为1。
60.s505、若检测到颗粒捕集器的运行状态参数等于第一预设状态参数,判定颗粒捕集器处于行车再生。
61.s506、若检测到柴油机颗粒捕集器处于行车再生,获取柴油机颗粒捕集器的剩余碳载量。
62.s507、判断柴油机颗粒捕集器的剩余碳载量是否小于或等于第一预设值。
63.具体的,设置第一预设值为5g/l。
64.s508、若检测到柴油机颗粒捕集器的剩余碳载量小于或等于第一预设碳载量,生成第一使能信号给自动变速箱控制单元,以使自动变速箱控制单元控制车辆空挡滑行。
65.s509、若检测到柴油机颗粒捕集器的剩余碳载量大于第一预设碳载量,生成第二使能信号给自动变速箱控制单元,以使自动变速箱控制单元控制车辆降挡行驶或者保持当前挡位行驶。
66.本实施例中,ecu先获取车辆的变速箱信息,并根据变速箱信息判断车辆的变速箱是否为amt,只有变速箱为amt时,才继续获取dpf的运行状态参数,否则,将会执行其他类型变速箱对应的控制策略,例如mt的dpf控制策略。当变速箱为amt时,ecu获取dpf的运行状态参数,并将其与第一预设状态参数进行比较,如此,来判断dpf是否处于行车再生,当dpf处于行车再生时,ecu获取dpf的剩余碳载量,并将其与第一预设值进行比较,进而判断dpf的剩余碳载量是否小于第一预设值,才生成第一使能信号给tcu,使tcu控制车辆进行空挡滑行,如此,以防止在dpf处于行车再生时,若dpf的剩余碳载量太高,发动机突然回到怠速对
柴油机颗粒捕集器造成损坏,只有在柴油机颗粒捕集器的剩余碳载量满足小于第一预设值时,启动空挡滑行功能才不会对dpf造成损坏。同时,如果ecu检测到的dpf的剩余碳载量大于第一预设值,则生成第二使能信号给tcu,tcu根据接收到的第二使能信号可以控制车辆进行降挡行驶,如此,既不会损坏dpf也不会进一步增大dpf捕集到的碳载量,造成dpf堵塞,或者,如果当前车速很低的情况下,继续保持当前挡位行驶。
67.基于同一构思,本发明实施例还提供了一种车辆的控制装置,以执行上述任一实施例的控制方法。图6为本发明实施例提供一种车辆的控制装置的结构示意图,如图6所示,该车辆包括自动变速箱控制单元1,该车辆的控制装置2包括:行车再生判断模块10,用于获取柴油机颗粒捕集器的运行状态参数,并根据柴油机颗粒捕集器的运行状态参数判断柴油机颗粒捕集器是否处于行车再生;碳载量检测模块20,用于若柴油机颗粒捕集器处于行车再生,获取柴油机颗粒捕集器的剩余碳载量,并判断柴油机颗粒捕集器的剩余碳载量是否小于或等于第一预设值;使能控制模块30,用于若柴油机颗粒捕集器的剩余碳载量小于或等于第一预设值,生成第一使能信号给自动变速箱控制单元,以使自动变速箱控制单元控制车辆空挡滑行。
68.在本实施例中,行车再生判断模块10获取柴油机颗粒捕集器的运行状态参数来判断柴油机颗粒捕集器是否处于行车再生,当柴油机颗粒捕集器处于行车再生时,碳载量检测模块20获取柴油机颗粒捕集器的剩余碳载量,并将其与第一预设值进行比较,判断剩余碳载量是否小于第一预设值,以防止在柴油机颗粒捕集器处于行车再生时,若柴油机颗粒捕集器的剩余碳载量太高,发动机突然回到怠速对柴油机颗粒捕集器造成损坏,只有在柴油机颗粒捕集器的剩余碳载量满足小于第一预设值时,使能控制模块30生成第一使能信号并发给自动变速箱控制单元,以使自动变速箱控制单元控制车辆空挡滑行,如此,保证在柴油机颗粒捕集器处于形成再生时,不会由于空挡滑行功能对柴油机颗粒捕集器造成损坏,保证车辆的可靠和安全行驶。
69.可选的,使能控制模块30还用于若柴油机颗粒捕集器的剩余碳载量大于第一预设碳载量,生成第二使能信号给自动变速箱控制单元,以使自动变速箱控制单元控制车辆降挡行驶或者保持当前挡位行驶。
70.具体的,如果车辆当前行驶的挡位较高,在dpf处于行车再生期间,碳载量检测模块20获取到的dpf的剩余碳载量大于第一预设值,则车辆无法进行空挡滑行,使能控制模块30生成第二使能信号给自动变速箱控制单元,使车辆进行降挡行驶,以保证dpf不会由于积累过高的碳载量而发生堵塞。当车辆当前行驶的挡位很低,无法再进行降挡行驶时,若dpf的剩余碳载量大于第一预设值,使能控制模块30生成第二使能信号给自动变速箱控制单元,可使车辆保持当前挡位行驶,避免发动机突然将至怠速,造成dpf损坏。
71.可选的,图7为本发明实施例提供的另一种车辆的控制装置的结构示意图,如图7所示,该车辆的控制装置2还包括变速箱检测模块40,变速箱检测模块40用于在行车再生判断之前,获取车辆的变速箱信息,若检测到车辆的变速箱为机械式自动变速箱,驱动行车再生判断模块10工作。
72.具体的,通过变速箱检测模块40获取车辆的变速箱信息,并根据变速箱信息判定车辆的变速箱是否匹配amt,在确定车辆的变速箱为amt时才允许行车再生判断模块10执行工作,保证车辆针对不同类型变速箱具有不同的dpf控制策略,更加可靠安全。
73.另外,本发明实施例还提供了一种车辆,包括如前的车辆的控制装置,该车辆包括自动变速箱控制单元1,其中,上述车辆的控制装置2包括电子控制单元,具有较高的集成度和较强的数据处理分析能力,且控制精度高。
74.综上,根据本发明实施例提出的车辆,可以解决在柴油机颗粒捕集器处于行车再生时,避免空挡滑行造成柴油机颗粒捕集器的损坏的问题,保证车辆的可靠和安全行驶。
75.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1