一种城市道路智能碾压进度监测装置的制作方法
1.本发明涉及一种智能碾压进度监测装置,尤其涉及一种城市道路智能碾压进度监测装置。
背景技术:
2.施工队在对城市道路进行铺设时,通常需要将沥青铺设在道路上,由于道路上会出现不平整的情况,因此需要使用碾压机,将道路进行碾压平整,但是在碾压过程中,车内的人员观察不到车附近的道路,因此在碾压过程中需要多次碾压,如此会降低工人的碾压效率。
3.现有城市道路智能碾压进度监测装置,包括有底座、第一电动推杆、第一距离传感器、摄像头、支撑板、第二转轴、第一弹簧、第一车轮和连接板,底座顶部中间设有第一电动推杆,第一电动推杆上部前侧连接有第一距离传感器,第一电动推杆的伸缩杆上连接有支撑板,支撑板右侧转动式连接有第一转轴,第一转轴顶部通过螺栓设有摄像头,底座下部前后两侧均转动式连接有第二转轴,第二转轴上均设有连接板,连接板下部的左右两侧均转动式连接有第一车轮,第二转轴和底座之间均设有第一弹簧。
4.通过将城市道路智能碾压进度监测装置安装在车外壁,然后对第一转轴进行转动,带动摄像头进行转动,使得摄像头能够对车附近的道路进行检测,而且可以通过控制第一电动推杆工作,进而使得摄像头进行位移,实现扩大监测范围的效果,但是需要人工进行控制摄像头的位移以及手动控制摄像头转动,如此装置结构单一,因此现在研发一种能够实现自动控制摄像头的位移以及转动,同时能够提高装置稳定性的城市道路智能碾压进度监测装置。
技术实现要素:
5.为了克服现有城市道路智能碾压进度监测装置,结构单一,需要人工进行控制摄像头的位移以及手动控制摄像头转动的缺点,要解决的技术问题为:提供一种能够实现自动控制摄像头的位移以及转动,同时能够提高装置稳定性的城市道路智能碾压进度监测装置。
6.本发明的技术实施方案是:一种城市道路智能碾压进度监测装置,包括有底座、第一电动推杆、第一距离传感器、摄像头、支撑板、第二转轴、第一弹簧、第一车轮、连接板、附着机构、旋转机构和稳定机构,底座顶部中间设置有第一电动推杆,第一电动推杆上部前侧设置有第一距离传感器,第一电动推的伸缩杆上设置有支撑板,支撑板右侧转动式连接有第一转轴,第一转轴顶部设置有用于监测地面是否平整的摄像头,底座下部前后两侧均转动式连接有第二转轴,第二转轴上均设置有连接板,连接板下部的左右两侧均转动式连接有能够辅助本城市道路智能碾压进度监测装置进行移动的第一车轮,第二转轴和底座之间均设置有第一弹簧,底座上设置有能够将本城市道路智能碾压进度监测装置附着在车外壁的附着机构,摄像头和支撑板之间设置有用于带动摄像头进行旋转的旋转机构,旋转机构
包括有驱动电机和第一固定部,支撑板底部右侧设置有第一固定部,第一固定部上设置有驱动电机,驱动电机输出轴通过联轴器和第一转轴底部连接,底座上设置有能够提高本城市道路智能碾压进度监测装置稳定性的稳定机构。
7.作为上述方案的改进,附着机构包括有第二弹簧、下压板、吸盘和压力传感器,底座底部左右两侧均前后对称设置有用于将本城市道路智能碾压进度监测装置吸附在车外壁的吸盘,底座底部前后两侧均左右对称设置有两个第二弹簧,第二弹簧一共为8个,第二弹簧位于吸盘之间,横向同侧的四个第二弹簧底部之间均设置有用于将连接板进行固定的下压板,右前侧的吸盘底部设置有压力传感器。
8.作为上述方案的改进,旋转机构还包括有第二距离传感器,摄像头右下侧设置有第二距离传感器。
9.作为上述方案的改进,稳定机构包括有第二固定部、第二电动推杆、固定轴、第二车轮和第三距离传感器,底座顶部左右两侧均设置有第二固定部,第二固定部之间设置有第二电动推杆,第二电动推杆的伸缩杆右侧连接有固定轴,固定轴右侧设置有第三距离传感器,固定轴上转动式连接有两个第二车轮。
10.作为上述方案的改进,还包括有用于对道路进行照明的照明机构,照明机构包括有照明灯具、固定块、拉绳、限位板、第三转轴和扭簧,第一电动推杆左上侧和支撑板左侧均设置有固定块,第一电动推杆上部设置有限位板,限位板左侧转动式连接有第三转轴,第三转轴上设置有用于对道路进行照明的照明灯具,第三转轴前后两侧和限位板之间均设置有扭簧,下侧的固定块顶部和照明灯具左侧之间设置有拉绳,拉绳穿过上侧的固定块。
11.作为上述方案的改进,还包括有用于对摄像头进行清洁的清洁机构,清洁机构包括有固定板、清洁部和第三弹簧,支撑板右侧的前后两侧均设置有固定板,固定板上部均滑动式连接有用于对摄像头进行清洁的清洁部,清洁部为清洁毛刷,清洁部和固定板之间均设置有两个第三弹簧。
12.作为上述方案的改进,还包括有用于自动喷水,能够起到降尘作用的喷洒机构,喷洒机构包括有第三固定部、水泵、水管、喷洒部、第四固定部和粉尘传感器,第一电动推杆的上部设置有两个第三固定部,两个第三固定部右侧之间设置有水泵,水泵顶部设置有水管,水管顶部和支撑板连接,水泵顶部设置有粉尘传感器,支撑板顶部设置有第四固定部,第四固定部内部中空,第四固定部和水管连通,第四固定部前后两侧均连接有用于喷水的喷洒部。
13.作为上述方案的改进,还包括有控制箱,底座顶部前侧中部设置有控制箱,控制箱内安装有开关电源、控制模块和电源模块,开关电源为整个城市道路智能碾压进度监测装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一距离传感器、第二距离传感器、第三距离传感器、粉尘传感器和压力传感器均通过电性和控制模块连接,第一电动推杆、第二电动推杆、照明灯具、驱动电机和水泵均通过外围电路和控制模块连接。
14.与现有技术相比,本发明具有如下优点:1、本发明通过触碰第一距离传感器的方式,能够触发第一电动推杆进行工作,从而扩大摄像头监测的范围。
15.2、本发明通过下压板和车外壁接触,使得下压板能够卡住连接板,使得第一车轮
保持向内侧收起的状态,如此就不会影响吸盘吸附在车外壁,进而使得摄像头能够被固定在车外壁。
16.3、本发明通过驱动电机输出轴转动不断带动第一转轴进行不断正反转,进而使得摄像头进行循环往复转动,能够使得摄像头对地面进行监测,便于工人开展碾压工作。
17.4、本发明通过照明灯具的照明下,能够对城市道路进行照明,提高道路的明亮度。
附图说明
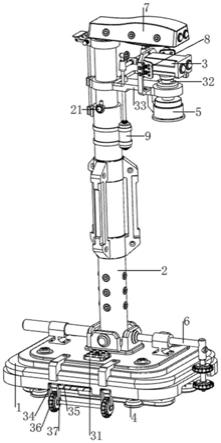
18.图1为本发明的第一视角立体结构示意图。
19.图2为本发明的第二视角立体结构示意图。
20.图3为本发明的第三视角立体结构示意图。
21.图4为本发明附着机构的第一视角立体结构示意图。
22.图5为本发明附着机构的第二视角立体结构示意图。
23.图6为本发明旋转机构的立体结构示意图。
24.图7为本发明稳定机构的第一视角立体结构示意图。
25.图8为本发明稳定机构的第二视角立体剖视示意图。
26.图9为本发明照明机构的第一视角立体剖视示意图。
27.图10为本发明照明机构的第二视角立体结构示意图。
28.图11为本发明照明机构的第三视角立体结构示意图。
29.图12为本发明清洁机构的第一视角立体结构示意图。
30.图13为本发明清洁机构的第二视角立体结构示意图。
31.图14为本发明喷洒机构的第一视角立体结构示意图。
32.图15为本发明喷洒机构的第二视角立体结构示意图。
33.图16为本发明的电路框图。
34.图17为本发明的电路原理图。
35.其中:1:底座,2:第一电动推杆,21:第一距离传感器,3:摄像头,31:控制箱,32:第一转轴,33:支撑板,34:第二转轴,35:第一弹簧,36:第一车轮,37:连接板,4:附着机构,41:第二弹簧,42:下压板,43:吸盘,44:压力传感器,5:旋转机构,51:驱动电机,52:第一固定部,53:第二距离传感器,6:稳定机构,61:第二固定部,62:第二电动推杆,63:固定轴,64:第二车轮,65:第三距离传感器,7:照明机构,71:照明灯具,72:固定块,73:拉绳,74:限位板,75:第三转轴,76:扭簧,8:清洁机构,81:固定板,82:清洁部,83:第三弹簧,9:喷洒机构,91:第三固定部,92:水泵,93:水管,94:喷洒部,95:第四固定部,96:粉尘传感器。
具体实施方式
36.以下结合附图和具体实施例对本发明作具体的介绍。
37.实施例1
38.一种城市道路智能碾压进度监测装置,如图1-3所示,包括有底座1、第一电动推杆2、第一距离传感器21、摄像头3、支撑板33、第二转轴34、第一弹簧35、第一车轮36、连接板37、附着机构4、旋转机构5和稳定机构6,底座1顶部中间通过螺栓安装有第一电动推杆2,第一电动推杆2上部前侧连接有第一距离传感器21,第一距离传感器21能够触发第一电动推
杆2开始工作,第一电动推杆2的伸缩杆上连接有支撑板33,第一电动推杆2的伸缩杆进行伸缩会带动支撑板33进行升降,支撑板33右侧转动式连接有第一转轴32,第一转轴32顶部通过螺栓设有摄像头3,用于监测地面是否平整,摄像头3通过电性和外接设备连接,外接设备安装在车内,摄像头3监测到的画面会在外接设备中显示,底座1下部前后两侧均转动式连接有第二转轴34,第二转轴34上均设有连接板37,连接板37下部的左右两侧均转动式连接有第一车轮36,能够辅助本城市道路智能碾压进度监测装置进行移动,第二转轴34和底座1之间均设有第一弹簧35,底座1上设有附着机构4,能够将本城市道路智能碾压进度监测装置附着在车外壁,摄像头3和支撑板33之间设有旋转机构5,用于带动摄像头3进行旋转,底座1上设有稳定机构6,能够提高本城市道路智能碾压进度监测装置稳定性。
39.如图1、图4和图5所示,附着机构4包括有第二弹簧41、下压板42、吸盘43和压力传感器44,底座1底部左右两侧均前后对称设有吸盘43,用于将本城市道路智能碾压进度监测装置吸附在车外壁,底座1底部前后两侧均左右对称设有两个第二弹簧41,第二弹簧41一共为8个,第二弹簧41起到缓冲作用,第二弹簧41位于吸盘43之间,横向同侧的四个第二弹簧41底部之间均设有下压板42,用于将连接板37进行固定,右前侧的吸盘43底部设有压力传感器44。
40.如图1和图6所示,旋转机构5包括有驱动电机51、第一固定部52和第二距离传感器53,支撑板33底部右侧连接有第一固定部52,第一固定部52为铁质品,第一固定部52上通过螺栓设有驱动电机51,驱动电机51输出轴通过联轴器和第一转轴32底部通过联轴器连接,驱动电机51输出轴转动带动第一转轴32进行转动,摄像头3右下侧连接有第二距离传感器53。
41.如图1、图7和图8所示,稳定机构6包括有第二固定部61、第二电动推杆62、固定轴63、第二车轮64和第三距离传感器65,底座1顶部左右两侧均通过螺栓设有第二固定部61,第二固定部61之间设有第二电动推杆62,第二电动推杆62的伸缩杆右侧连接有固定轴63,固定轴63右侧设有第三距离传感器65,第三距离传感器65用于控制第二电动推杆62停止工作,固定轴63中部和下部均转动式连接有第二车轮64,第二车轮64能够在地面上进行滚动,能够提高本城市道路智能碾压进度监测装置的稳定性。
42.在施工队对城市道路进行碾压时,为了能够提高碾压效率,需要对城市道路碾压的进度进行实时监测,从而辅助施工队进行碾压,可以使用本装置进行操作,首先将本装置进行通电,然后将本装置移动到车旁,在第一车轮36的转动作用下,能够辅助本装置进行移动,移动到目的地时,手动接触第一距离传感器21,第一距离传感器21检测到和手之间的距离小于额定值时,控制模块控制第一电动推杆2的伸缩杆进行伸长运动2秒后停止工作,带动支撑板33向上移动,从而带动第一转轴32、摄像头3、驱动电机51和第一固定部52向上移动,如此能够扩大摄像头3监测的范围,然后准备将本装置安装在车外壁,需要将本装置转动90度,然后将第一车轮36和连接板37分别向内侧转动,带动第一转轴32进行转动,使得第一弹簧35被扭转,然后将底座1底部和车外壁进行靠近,下压板42先和车外壁贴合,使得下压板42向上移动,第二弹簧41被压缩,下压板42向上移动将连接板37进行卡住,随后吸盘43吸附在车外壁上,第一车轮36保持向内收起的状态,此时压力传感器44检测到压力值大于额定值,控制模块控制第二电动推杆62的伸缩杆进行伸长运动,带动固定轴63向右移动,从而带动第二车轮64和第三距离传感器65向右移动,使得第二车轮64和地面接触,而且第三
距离传感器65也慢慢靠近地面,第三距离传感器65检测到和地面之间的距离小于额定值时,控制模块控制第二电动推杆62停止工作,此时摄像头3和第二距离传感器53分别朝向地面,第二距离传感器53检测到地面之间的距离小于额定值时,控制模块控制驱动电机51进行工作,驱动电机51输出轴进行正转50度,然后反转100度,随后循环正反转100度,随之带动第一转轴32进行正反转,进而带动摄像头3和第二距离传感器53进行正反转,如此摄像头3能够对地面进行监测,工人进行缓慢开车,使得第二车轮64在地面上进行滚动,能够提高本装置的稳定性,而且车辆移动时会带动本装置进行移动,摄像头3则会对地面进行监测,工人可以通过外接设备观察到地面的碾压进度;完成碾压后,可以将吸盘43和车外壁脱离,使得下压板42和车外壁分离,在第二弹簧41的作用下,带动下压板42移动复位和连接板37分离,在第一弹簧35的作用下,带动第一转轴32、连接板37和第一车轮36转动复位,此时压力传感器44检测到压力小于额定值时,控制模块控制驱动电机51输出轴转动到初始状态后停止工作,同时控制第二电动推杆62的伸缩杆进行缩短运动,缩短运动的时间和伸长运动的时间一致,第二电动推杆62的伸缩杆缩短运动复位后自动停止工作,带动固定轴63、第二车轮64和第三距离传感器65向左移动复位,控制模块同时控制第一电动推杆2的伸缩杆进行缩短运动2秒后停止工作,带动支撑板33向下移动,从而带动第一转轴32、摄像头3、驱动电机51和第一固定部52向下移动复位,不使用时,可以将本装置进行断电;重复以上操作即可实现在碾压城市道路的同时,对城市道路进行监测,辅助工人进行碾压工作的效果。
43.实施例2
44.在实施例1的基础之上,如图1、图2、图9、图10和图11所示,还包括有用于对道路进行照明的照明机构7,用于对道路进行照明,照明机构7包括有照明灯具71、固定块72、拉绳73、限位板74、第三转轴75和扭簧76,第一电动推杆2左上侧和支撑板33左侧均通过螺栓设有固定块72,第一电动推杆2的伸缩杆上部设有限位板74,限位板74左侧转动式连接有第三转轴75,第三转轴75上设有用于对道路进行照明的照明灯具71,用于对道路进行照明,第三转轴75前后两侧和限位板74之间均设有扭簧76,扭簧76能够带动照明灯具71转动复位,下侧的固定块72顶部和照明灯具71左侧之间设有拉绳73,拉绳73穿过上侧的固定块72。
45.当第一电动推杆2的伸缩杆进行伸长时,通过移动端带动限位板74向上移动,此时拉绳73拉住照明灯具71,使得照明灯具71向左侧转动打开,扭簧76被扭转,在限位板74的作用下,能够对照明灯具71进行限位,当压力传感器44检测到压力大于额定值时,控制模块控制照明灯具71进行工作,此时照明灯具71能够对道路进行照明;当压力传感器44检测到压力小于额定值时,控制模块控制照明灯具71停止工作,第一电动推杆2的伸缩杆进行缩短时,通过移动端带动限位板74向下移动复位,在扭簧76的作用下,带动照明灯具71转动复位。
46.如图1、图2、图12和图13所示,还包括有用于对摄像头3进行清洁的清洁机构8,清洁机构8包括有固定板81、清洁部82和第三弹簧83,支撑板33右侧的前后两侧均连接有固定板81,固定板81上部均滑动式连接有用于对摄像头3进行清洁的清洁部82,用于对摄像头3进行清洁,清洁部82为清洁毛刷,清洁部82和固定板81之间均设有两个第三弹簧83,第三弹簧83起到缓冲作用。
47.摄像头3在转动过程中会和清洁部82接触,清洁部82对摄像头3进行清洁,第三弹簧83适应性的发生形变,如此能够自动对摄像头3进行清洁。
48.如图1、图2、图14和图15所示,还包括有用于自动喷水,能够起到降尘作用的喷洒机构9,用于自动喷水,能够起到降尘作用,喷洒机构9包括有第三固定部91、水泵92、水管93、喷洒部94、第四固定部95和粉尘传感器96,第一电动推杆2上部连接有两个第三固定部91,两个第三固定部91右侧之间设有水泵92,水泵92顶部设有水管93,水管93为弹性软管,水管93顶部和支撑板33连接,水泵92顶部设有粉尘传感器96,支撑板33顶部通过螺栓设有第四固定部95,第四固定部95内部中空,第四固定部95和水管93连通,第四固定部95前后两侧均连接有用于喷水的喷洒部94,用于喷水,喷洒部94为雾化喷头。
49.需要对地面进行降尘时,可以将水箱安装在第一电动推杆2上,然后将水箱装满水,将水箱通过皮管和水泵92安装在一起,当粉尘传感器96检测到粉尘大于额定值时,控制模块控制水泵92开始工作,水会通过皮管和水管93流进第四固定部95内,然后通过喷洒部94喷出到地面上,能够起到降尘的效果;当粉尘传感器96检测到粉尘小于额定值时,控制模块控制水泵92停止工作。
50.如图1、图16和图17所示,还包括有控制箱31,底座1顶部前侧中部设有控制箱31,控制箱31内安装有开关电源、控制模块和电源模块,开关电源为整个城市道路智能碾压进度监测装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一距离传感器21、第二距离传感器53、第三距离传感器65、粉尘传感器96和压力传感器44均通过电性和控制模块连接,第一电动推杆2、第二电动推杆62、照明灯具71、驱动电机51和水泵92均通过外围电路和控制模块连接。
51.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1