换挡控制方法、装置、设备及介质与流程
1.本技术涉及车辆技术领域,尤其涉及一种换挡控制方法、装置、设备、计算机可读存储介质、计算机程序产品。
背景技术:
2.车辆的换挡进程包括清扭、摘挡、调速和挂挡四个阶段,通常情况下,如图1所示,在完全清扭完毕后再进行摘挡,然后两个换挡电磁阀同时撤气以进行摘挡,摘空完成后,同时关闭电磁阀。摘空结束后,进行调速动作,调速完成后,进入挂挡阶段,直接进行挂挡动作。然而,两个换挡电磁阀对应的横截面积通常不同,因此在摘空结束后两个换挡电磁阀同时关闭时,可能导致气缸活塞杆位置发生漂移。当位置发生漂移时,判断当前气缸活塞杆的位置不为目标位置,因此需要重新摘空,增加了摘空时间。并且,多次摘空需要换挡电磁阀频繁开关,影响电磁阀的使用寿命。
3.因此,业界亟需一种用时较短的换挡控制方法。
技术实现要素:
4.本技术提供了一种换挡控制方法。该方法能够避免摘空结束后的位置漂移现象,减少摘空时间。本技术还提供了该方法对应的装置、设备、计算机可读存储介质、计算机程序产品。
5.第一方面,本技术提供了一种换挡控制方法,该方法包括:
6.当清扭过程中扭矩低于预设阈值时,执行摘挡;
7.摘挡结束后,保持第一换挡电磁阀和第二换挡电磁阀开启,执行调速;
8.根据目标挡位位置,在挂挡阶段关闭所述第一换挡电磁阀。
9.在一些可能的实现方式中,所述当清扭过程中扭矩低于预设阈值时,执行摘挡,包括:
10.当清扭过程中扭矩低于预设阈值时,通过单阀进行摘挡。
11.在一些可能的实现方式中,所述预设阈值大于零。
12.在一些可能的实现方式中,所述摘挡结束后,保持第一换挡电磁阀和第二换挡电磁阀开启,执行调速,包括:
13.摘挡结束后,保持第一换挡电磁阀和第二换挡电磁阀开启,执行调速;
14.执行选挡操作。
15.在一些可能的实现方式中,所述第一换挡电磁阀为与所述目标挡位位置对向的换挡电磁阀。
16.在一些可能的实现方式中,所述目标挡位位置为上部挡位位置或下部挡位位置。第二方面,本技术提供了一种换挡控制装置,该装置包括:
17.摘挡单元,用于当清扭过程中扭矩低于预设阈值时,执行摘挡;
18.调速单元,用于摘挡结束后,保持第一换挡电磁阀和第二换挡电磁阀开启,执行调
速;
19.关闭单元,用于根据目标挡位位置,在挂挡阶段关闭所述第一换挡电磁阀。
20.在一些可能的实现方式中,摘挡单元具体用于:
21.当清扭过程中扭矩低于预设阈值时,通过单阀进行摘挡。
22.在一些可能的实现方式中,所述预设阈值大于零。
23.在一些可能的实现方式中,调速单元具体用于:
24.摘挡结束后,保持第一换挡电磁阀和第二换挡电磁阀开启,执行调速;
25.执行选挡操作。
26.在一些可能的实现方式中,所述第一换挡电磁阀为与所述目标挡位位置对向的换挡电磁阀。
27.在一些可能的实现方式中,所述目标挡位位置为上部挡位位置或下部挡位位置。
28.第三方面,本技术提供一种设备,设备包括处理器和存储器。处理器、存储器进行相互的通信。处理器用于执行存储器中存储的指令,以使得设备执行如第一方面或第一方面的任一种实现方式中的换挡控制方法。
29.第四方面,本技术提供一种计算机可读存储介质,计算机可读存储介质中存储有指令,指令指示设备执行上述第一方面或第一方面的任一种实现方式所述的换挡控制方法。
30.第五方面,本技术提供了一种包含指令的计算机程序产品,当其在设备上运行时,使得设备执行上述第一方面或第一方面的任一种实现方式所述的换挡控制方法。
31.本技术在上述各方面提供的实现方式的基础上,还可以进行进一步组合以提供更多实现方式。
32.从以上技术方案可以看出,本技术实施例具有以下优点:
33.本技术实施例提供了一种换挡控制方法,该方法通过处理单元判断在清扭过程中扭矩是否低于预设阈值,当扭矩低于预设阈值时,执行摘挡,摘挡结束后,保持第一换挡电磁阀和第二换挡电磁阀开启,执行调速,然后根据目标挡位位置,在挂挡阶段关闭所述第一换挡电磁阀。由此,第一换挡电磁阀和第二换挡电磁阀不在调速阶段关闭,而是在挂挡阶段再关闭其中的一个以进行挂挡,从而避免因为关闭电磁阀导致气缸活塞杆位置漂移无法挂入需求挡位的情况,减少了挂挡时间,延长了电磁阀的寿命。
34.本技术在上述各方面提供的实现方式的基础上,还可以进行进一步组合以提供更多实现方式。
附图说明
35.为了更清楚地说明本技术实施例的技术方法,下面将对实施例中所需使用的附图作以简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
36.图1为本技术实施例提供的一种车辆换挡进程的流程图;
37.图2为本技术实施例提供的一种换挡的结构示意图;
38.图3为本技术实施例提供的一种换挡漂移的数据示意图;
39.图4为本技术实施例提供的一种换挡控制方法的流程示意图;
40.图5为本技术实施例提供的一种挡位分布的示意图;
41.图6为本技术实施例提供的一种换挡过程多情况的示意图;
42.图7为本技术实施例提供的一种换挡控制装置的结构示意图。
具体实施方式
43.下面将结合本技术中的附图,对本技术提供的实施例中的方案进行描述。
44.本技术实施例中的术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。
45.首先对本技术实施例中所涉及到的一些技术术语进行介绍。
46.电控机械式自动变速箱(automated mechanical transmission,amt)是在原有机械式手动变速箱基本结构不变的情况下,加装了电子单元的自动操控机构,取代了原来由驾驶人人工完成的离合器分离与接合、摘挡与挂挡以及发动机的转速与转矩的调节等操作,实现换挡过程的操纵自动化,可以给驾驶人员带来方便。
47.自动变速箱控制单元(transmission control unit,tcu)是车辆电控技术的重要组成部分,能够实现对于车辆的自动变速。具体地,tcu用于控制车辆换挡。如图2所示为换挡结构图。
48.图2中e、f为换挡电磁阀,a、b为选挡电磁阀。e和f的通断状态影响气缸内部相互独立的各封闭腔室是通向大气还是通向压缩空气源,从而能够将气缸活塞杆定位在目标位置。
49.挡位包括1挡、2挡、3挡、4挡、5挡和r挡。如图2所示,1挡、3挡和5挡位于上部挡位位置,r挡、2挡和4挡位于下部挡位位置。
50.摘空过程中,需要将气缸活塞杆的位置调至中间状态。通常情况下,同时打开e和f进行摘空,摘空完成后,e和f同时撤气。由于f阀活塞面积小,位置会往f侧(下侧)方向漂移。如图3所示,关闭电磁阀时位置发生了漂移,约1mm。因此可能导致气缸活塞杆的位置不在目标位置,需要重新摘空,由此增加换挡时间。
51.并且,通常情况下在完全清扭完毕后(扭矩为0)再进行摘挡,耗时较多,影响换挡时间。
52.有鉴于此,本技术提供了一种摘空控制方法,该方法应用于处理单元。其中,处理单元可以为tcu,也可以为其他能够执行换挡的电子单元。具体地,处理单元在清扭过程中判断扭矩是否低于预设阈值,当低于预设阈值时,开启第一换挡电磁阀和第二换挡电磁阀执行摘挡,在摘挡结束后,保持第一换挡电磁阀和第二换挡电磁阀开启,执行调速,然后根据目标挡位位置关闭第一换挡电磁阀。由此,第一换挡电磁阀和第二换挡电磁阀不在摘空结束后关闭,而是在挂挡阶段根据需求关闭,从而避免因为关闭电磁阀导致气缸活塞杆位置漂移无法挂入需求挡位的情况,减少了挂挡时间,延长了电磁阀的寿命。
53.并且,在清扭过程中,当扭矩低于预设阈值时即执行摘挡,而无需等到完全清扭结束后再执行摘挡,从而减少了换挡时间。
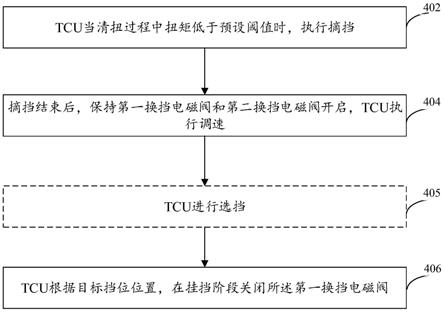
54.为了使得本公开的技术方案更加清楚、易于理解,下面以tcu为例,如图4所示,对本公开实施例提供的换挡控制方法进行介绍。
55.s402:tcu当清扭过程中扭矩低于预设阈值时,执行摘挡。
56.通常情况下,清扭过程中,需要将扭矩清为0,然后才允许进入摘挡阶段进行摘挡操作。但是清扭耗时较多,如果在扭矩清为0后再进行摘挡可能导致耗时较长。
57.本实施例中,tcu可以为扭矩设置预设阈值,当扭矩低于预设阈值时即可进行摘挡。在一些可能的实现方式中,预设阈值大于0,例如可以为100牛米(nm)。
58.具体地,tcu在清扭过程中判断扭矩是否低于预设阈值,当低于预设阈值时,利用单电磁阀进行摘挡,当扭矩持续下降至0后,进入摘挡过程,进行双电磁阀摘挡。
59.如图2所示,挡位位置包括上部位置和下部位置。其中上部和下部之间存在中间区域。挡位包括1挡、2挡、3挡、4挡、5挡和r挡。上部位置包括1挡、3挡和5挡,下部位置包括2挡、4挡和r挡。如图5所示,以2挡和3挡为例。2挡和3挡之间包括空挡带,摘空过程中,需要开启e和f以使气缸活塞杆的位置处于空挡带中。
60.但是,由于换挡执行机构设计原因(e和f的横截面积不同),两阀同时打开时两侧受力是不同的,因此同时关闭电磁阀时可能出现位移漂移情况,例如可能存在气缸活塞杆向下漂移至图中区间n0中。在对摘空完成进行判断时,需要气缸活塞杆位于空挡带中,因此需要重新进行摘挡,造成了换挡时间变长,影响动力性。并且电磁阀频繁开关,一定程度上影响了电磁阀寿命。
61.如图6所示为一种从2挡升为3挡的换挡控制示意图。其中电磁阀e控制气缸活塞杆的位置向上,电磁阀f控制气缸活塞杆的位置的位置向下。
62.在清扭阶段,tcu判断清扭将扭矩清到预设阈值时,打开电磁阀e进行摘挡。如图5所示,气缸活塞杆从区间n1上移至空挡带0。此时,扭矩继续下降,当扭矩下降至0时,进入摘挡,电磁阀f打开,电磁阀e和电磁阀f控制气缸活塞杆位于空挡带。
63.如图5所示,根据挡位的不同,摘空可以分为空挡带0,空挡带1和空挡带2三个空挡带。当气缸活塞杆位于这三个空挡带时,均可以认为摘空成功。
64.s404:摘挡结束后,保持第一换挡电磁阀和第二换挡电磁阀开启,tcu执行调速。
65.通常情况下,如图1所示,电磁阀e和电磁阀f在摘空结束后同时撤气。但是由于2挡侧阀活塞面积小,导致气缸活塞杆位置会往2挡侧漂移。例如,气缸活塞杆可能漂移至区间n0中。
66.在本实施中,保持电磁阀e和电磁阀f开启的情况下执行调速。由于电磁阀e和电磁阀f均开启,因此可以将气缸活塞杆维持在空挡带位置。
67.s406:tcu根据目标挡位位置,在挂挡阶段关闭所述第一换挡电磁阀。
68.由于在调速阶段电磁阀e和电磁阀f均开启,因此可以通过关闭第一换挡电磁阀以实现挂挡。在本实施例中,为了使气缸活塞杆上移至3挡,因此可以保持电磁阀e打开,关闭电磁阀f。如果需要将气缸活塞杆下移至r挡、2挡或者4挡时,则关闭电磁阀e,使气缸活塞杆下移。
69.在一些可能的实现方式中,在s404和s406之间还包括s405:tcu进行选挡。
70.选挡是指通过电磁阀a和电磁阀b控制气缸活塞杆如图2所示的左右位置。当需要气缸活塞杆左移时,打开电磁阀a,当需要气缸活塞杆右移时,打开电磁阀b,实现选挡。
71.当需要将挡位由1挡换为r挡、3挡换为2挡或者5挡换为4挡时,tcu在清扭过程中扭矩低于预设阈值时即开启电磁阀f执行摘挡。当扭矩为0时,tcu进入摘挡,开启电磁阀e,使
电磁阀e和电磁阀f同时开启。摘挡结束后,tcu执行调速,然后在挂挡阶段关闭电磁阀e,保持电磁阀f开启,使气缸活塞杆下移至对应挡位。
72.当需要将挡位由r挡换为1挡、2挡换为3挡或者4挡换为5挡时,tcu在清扭过程中扭矩低于预设阈值时即开启电磁阀e执行摘挡。当扭矩为0时,tcu进入摘挡,开启电磁阀f,使电磁阀e和电磁阀f同时开启。摘挡结束后,tcu执行调速,然后在挂挡阶段关闭电磁阀f,保持电磁阀e开启,使气缸活塞杆下移至对应挡位。
73.当需要将挡位由1挡换为3挡、1挡换为5挡或者3挡换为5挡时,tcu在清扭过程中扭矩低于预设阈值时即开启电磁阀f执行摘挡。当扭矩为0时,tcu进入摘挡,开启电磁阀e,使电磁阀e和电磁阀f同时开启。摘挡结束后,tcu执行调速,控制电磁阀a使气缸活塞杆左移至对应位置,然后在挂挡阶段关闭电磁阀f,保持电磁阀e开启,使气缸活塞杆上移至对应挡位。
74.当需要将挡位由1挡换为2挡、1挡换为4挡或者3挡换为4挡时,tcu在清扭过程中扭矩低于预设阈值时即开启电磁阀f执行摘挡。当扭矩为0时,tcu进入摘挡,开启电磁阀e,使电磁阀e和电磁阀f同时开启。摘挡结束后,tcu执行调速,控制电磁阀a使气缸活塞杆左移至对应位置,然后在挂挡阶段关闭电磁阀e,保持电磁阀f开启,使气缸活塞杆下移至对应挡位。
75.当需要将挡位由3挡换为1挡、5挡换为3挡或者5挡换为1挡时,tcu在清扭过程中扭矩低于预设阈值时即开启电磁阀f执行摘挡。当扭矩为0时,tcu进入摘挡,开启电磁阀e,使电磁阀e和电磁阀f同时开启。摘挡结束后,tcu执行调速,控制电磁阀b使气缸活塞杆右移至对应位置,然后在挂挡阶段关闭电磁阀f,保持电磁阀e开启,使气缸活塞杆上移至对应挡位。
76.当需要将挡位由3挡换为r挡、5挡换为2挡或者5挡换为r挡时,tcu在清扭过程中扭矩低于预设阈值时即开启电磁阀f执行摘挡。当扭矩为0时,tcu进入摘挡,开启电磁阀e,使电磁阀e和电磁阀f同时开启。摘挡结束后,tcu执行调速,控制电磁阀b使气缸活塞杆右移至对应位置,然后在挂挡阶段关闭电磁阀e,保持电磁阀f开启,使气缸活塞杆下移至对应挡位。
77.当需要将挡位由r挡换为3挡、r挡换为5挡或者2挡换为5挡时,tcu在清扭过程中扭矩低于预设阈值时即开启电磁阀e执行摘挡。当扭矩为0时,tcu进入摘挡,开启电磁阀f,使电磁阀e和电磁阀f同时开启。摘挡结束后,tcu执行调速,控制电磁阀a使气缸活塞杆左移至对应位置,然后在挂挡阶段关闭电磁阀f,保持电磁阀e开启,使气缸活塞杆上移至对应挡位。
78.当需要将挡位由r挡换为2挡、r挡换为4挡或者2挡换为4挡时,tcu在清扭过程中扭矩低于预设阈值时即开启电磁阀e执行摘挡。当扭矩为0时,tcu进入摘挡,开启电磁阀f,使电磁阀e和电磁阀f同时开启。摘挡结束后,tcu执行调速,控制电磁阀a使气缸活塞杆左移至对应位置,然后在挂挡阶段关闭电磁阀e,保持电磁阀f开启,使气缸活塞杆下移至对应挡位。
79.当需要将挡位由2挡换为1挡、4挡换为3挡或者4挡换为1挡时,tcu在清扭过程中扭矩低于预设阈值时即开启电磁阀e执行摘挡。当扭矩为0时,tcu进入摘挡,开启电磁阀f,使电磁阀e和电磁阀f同时开启。摘挡结束后,tcu执行调速,控制电磁阀a使气缸活塞杆右移至
对应位置,然后在挂挡阶段关闭电磁阀f,保持电磁阀e开启,使气缸活塞杆上移至对应挡位。
80.当需要将挡位由2挡换为r挡、4挡换为2挡或者4挡换为r挡时,tcu在清扭过程中扭矩低于预设阈值时即开启电磁阀e执行摘挡。当扭矩为0时,tcu进入摘挡,开启电磁阀f,使电磁阀e和电磁阀f同时开启。摘挡结束后,tcu执行调速,控制电磁阀a使气缸活塞杆右移至对应位置,然后在挂挡阶段关闭电磁阀e,保持电磁阀f开启,使气缸活塞杆下移至对应挡位。
81.基于以上内容的描述,本技术提供了一种换挡控制方法,具体地,tcu在清扭过程中判断扭矩是否低于预设阈值,当扭矩低于预设阈值时,执行摘挡,摘挡结束后,保持第一换挡电磁阀和第二换挡电磁阀开启,执行调速,然后根据目标挡位位置,在挂挡阶段关闭所述第一换挡电磁阀。由此,第一换挡电磁阀和第二换挡电磁阀不在调速阶段关闭,而是在挂挡阶段再关闭其中的一个以进行挂挡,从而避免因为关闭电磁阀导致气缸活塞杆位置漂移无法挂入需求挡位的情况,减少了挂挡时间,延长了电磁阀的寿命。
82.并且,当扭矩低于预设阈值时即可以执行摘挡,缩短了换挡的时间,增强了换挡的动力性。
83.与上述方法实施例相对应的,本技术还提供了一种换挡控制装置,参见图7,该装置700包括:摘挡单元702、调速单元704以及关闭单元706。
84.摘挡单元,用于当清扭过程中扭矩低于预设阈值时,执行摘挡;
85.调速单元,用于摘挡结束后,保持第一换挡电磁阀和第二换挡电磁阀开启,执行调速;
86.关闭单元,用于根据目标挡位位置,在挂挡阶段关闭所述第一换挡电磁阀。
87.在一些可能的实现方式中,摘挡单元具体用于:
88.当清扭过程中扭矩低于预设阈值时,通过单阀进行摘挡。
89.在一些可能的实现方式中,所述预设阈值大于零。
90.在一些可能的实现方式中,调速单元具体用于:
91.摘挡结束后,保持第一换挡电磁阀和第二换挡电磁阀开启,执行调速;
92.执行选挡操作。
93.在一些可能的实现方式中,所述第一换挡电磁阀为与所述目标挡位位置对向的换挡电磁阀。
94.在一些可能的实现方式中,所述目标挡位位置为上部挡位位置或下部挡位位置。
95.本技术提供一种设备,用于实现摘挡控制方法。该设备包括处理器和存储器。处理器、存储器进行相互的通信。该处理器用于执行存储器中存储的指令,以使得设备执行摘挡控制方法。
96.本技术提供一种计算机可读存储介质,计算机可读存储介质中存储有指令,当其在设备上运行时,使得设备执行上述摘挡控制方法。
97.本技术提供了一种包含指令的计算机程序产品,当其在设备上运行时,使得设备执行上述摘挡控制方法。
98.另外需说明的是,以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也
可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。另外,本技术提供的装置实施例附图中,模块之间的连接关系表示它们之间具有通信连接,具体可以实现为一条或多条通信总线或信号线。
99.通过以上的实施方式的描述,所属领域的技术人员可以清楚地了解到本技术可借助软件加必需的通用硬件的方式来实现,当然也可以通过专用硬件包括专用集成电路、专用cpu、专用存储器、专用元器件等来实现。一般情况下,凡由计算机程序完成的功能都可以很容易地用相应的硬件来实现,而且,用来实现同一功能的具体硬件结构也可以是多种多样的,例如模拟电路、数字电路或专用电路等。但是,对本技术而言更多情况下软件程序实现是更佳的实施方式。基于这样的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在可读取的存储介质中,如计算机的软盘、u盘、移动硬盘、rom、ram、磁碟或者光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,训练设备,或者网络设备等)执行本技术各个实施例所述的方法。
100.在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。
101.所述计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行所述计算机程序指令时,全部或部分地产生按照本技术实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、训练设备或数据中心通过有线(例如同轴电缆、光纤、数字用户线(dsl))或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、训练设备或数据中心进行传输。所述计算机可读存储介质可以是计算机能够存储的任何可用介质或者是包含一个或多个可用介质集成的训练设备、数据中心等数据存储设备。所述可用介质可以是磁性介质,(例如,软盘、硬盘、磁带)、光介质(例如,dvd)、或者半导体介质(例如固态硬盘(solid state disk,ssd))等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1