液压修复机器人的制作方法
1.本技术涉及管道修复装置的领域,尤其是涉及一种液压修复机器人。
背景技术:
2.地下埋设的管道经过长期使用后,会出现渗漏、破裂等情况,需要及时进行修复,以减少对居民日常生活的影响。一般采用管道修复装置进行修复。
3.如专利公告号为cn209540312u的中国实用新型专利,公布了一种非开挖式管道局部点状修复装置,包括伸入管道、修复组件和移动组件,伸入管道包括第一管道、第二管道和移动管道,修复组件包括插接管、加热器和气囊,移动组件包括两个移动半径可调的移动器。
4.采用上述修复装置,修复管道时,需要将装置整体伸进管道内,待装置整体移动至管道待修复处再进行修复。当管道发生变形时,上述修复装置无法通过管道并进行修复,需要人工将管道外形大致还原后,再采用上述修复装置进行修复,比较麻烦,有待改进。
技术实现要素:
5.为了改善管道发生变形时修复较为麻烦的问题,本技术提供一种液压修复机器人。
6.本技术提供的一种液压修复机器人采用如下的技术方案:
7.一种液压修复机器人,包括基座、液压装置和修复气囊,所述基座的外侧壁上设置有滚轮和摄像头,所述液压装置包括驱动组件、滑移连接于所述驱动组件上的复原件和设置于所述驱动组件上的抵接块,所述复原件和所述抵接块位于所述驱动组件的相对两侧,所述驱动组件驱动所述复原件移动,所述复原件的滑移方向朝靠近或远离所述驱动组件设置;所述驱动组件滑移连接于所述基座上,所述基座上设置有弹性件,所述弹性件使得所述驱动组件可相对定位于所述基座上,所述修复气囊位于所述基座远离所述液压装置的一侧。
8.通过采用上述技术方案,当需要对变形的管道进行修复时,控制驱动组件驱动复原件朝靠近抵接块的方向移动,至复原件和抵接块能通过变形的管道,将机械人整体放置于管道内,滚轮的设置减少了机械人进入管道过程中与管道内壁之间的摩擦,通过摄像头观察管道内部的情况,至复原件与管道待修复处对准,控制驱动组件驱动复原件朝远离抵接块的方向移动,至复原件抵接管道内壁,继续驱动复原件移动,通过弹性件使抵接块相向移动,进而将变形的管道撑开以修复管道形变,至管道外形还原后,控制驱动组件驱动复原件朝靠近抵接块的方向移动,使机械人整体能继续伸入管道内部,至修复气囊与还原后的管道对准,通过修复气囊对管道进行修复即可,无需人工对管道的外形进行还原,减小了修复变形管道的难度,使得修复变形管道更加方便。
9.可选的,所述驱动组件包括驱动件和设置于所述驱动件上的滑移块,所述复原件和所述抵接块设置于所述驱动件上,所述滑移块滑移连接于所述基座上,所述弹性件位于
所述滑移块的相对两侧,并抵紧所述滑移块设置。
10.通过采用上述技术方案,设置驱动件和滑移块,当复原件和抵接块未撑开管道时,两侧弹性件抵紧滑移块并达到平衡状态,进而实现驱动件与基座之间的相对定位,当驱动件驱动复原件移动时,复原件抵接管道内壁,在驱动件的持续驱动下,管道内壁对复原件产生作用力使得驱动件带动滑移块打破两侧弹性件之间的平衡,在基座上发生移动,带动抵接块相向运动,以实现抵接块和复原件对管道内壁进行撑开,使得对管道外形进行还原更加方便。
11.可选的,所述复原件包括设置于所述驱动件上的固定部和设置于所述固定部上的复原部,所述复原部设置有多个,多个所述复原部呈并排设置,其中一个所述复原部与所述固定部固定连接,相邻所述复原部之间通过连接组件连接。
12.通过采用上述技术方案,可根据管道待修复处的大小,通过连接组件对固定部上的各个复原部进行拆卸和安装,使得固定部上各个复原部的宽度之和与管道待修复处的大小适配,提高了复原件的适用性,并使得液压装置对管道变形处的复原效果更佳。
13.可选的,所述连接组件与所述复原部一一对应设置,所述连接组件包括设置于所述复原部上的卡块和定位件,所述复原部上还开设有卡槽,所述卡槽供相邻所述复原部上的卡块卡入,所述卡槽的内壁上设置有弹性块,所述弹性块抵紧所述卡块设置;所述复原部的外侧壁上还开设有凹槽,所述凹槽位于所述卡槽的一侧并靠近所述弹性块设置,所述凹槽的内壁上开设有定位槽,所述定位槽位于所述凹槽靠近所述卡槽的一侧,所述定位件对应所述凹槽设置并滑移连接于所述复原部上,所述凹槽供所述定位件卡入;所述定位件包括滑移部、设置于所述滑移部上的定位部和调节部,所述定位部靠近所述凹槽设置,所述定位槽供所述定位部卡入,所述弹性块使得所述定位部抵紧所述定位槽的内壁设置,所述调节部位于所述复原部的外侧。
14.通过采用上述技术方案,当安装两个复原部时,将复原部上的卡块卡入另一个复原部上的卡槽内,移动复原部带动卡块移动使卡块抵紧卡槽内的弹性块,使得复原部上的定位件和另一个复原部上的凹槽对准,移动定位件,使定位件卡入凹槽内,至定位部与凹槽内的定位槽对准,松开复原部,弹性块复位并将卡块抵紧于凹槽的内壁上,同时,带动定位部卡入定位槽内并抵紧定位槽的内壁,即可实现两个复原部之间的安装,使得安装两个复原部更加方便。
15.可选的,所述凹槽、所述定位槽和所述卡槽连通,所述弹性块抵紧所述定位槽内的所述定位部设置。
16.通过采用上述技术方案,当拆卸复原部时,移动复原部带动其上卡块抵紧弹性块,使定位部脱离定位槽,此时定位部在弹性块的作用下弹出,使定位部与定位槽错开,接着将定位件从凹槽内取出即可实现两个复原部之间的拆卸,减少了定位部在弹性块抵紧卡块的作用下,再一次卡入定位槽内的情况,使得拆卸复原部更加方便。
17.可选的,所述基座包括固定底座和转动连接于所述固定底座上的安装块,所述滚轮设置于所述固定底座上,所述驱动组件滑移连接于所述安装块上,且所述弹性件设置于所述安装块上,所述固定底座上设置有传动组件,所述传动组件驱动所述安装块转动并定位所述安装块。
18.通过采用上述技术方案,设置传动组件,可通过摄像头观察管道内部情况,控制传
动组件驱动安装块转动,安装块带动驱动组件转动,进而带动复原件转动,使复原件对准管道待修复处并定位,无需转动机械人整体,使得调节复原件对准管道待修复处更加方便。
19.可选的,所述传动组件包括设置于所述固定底座上的驱动机、转动连接于所述固定底座上的蜗轮和与所述蜗轮配合的蜗杆,所述蜗轮和所述安装块固定连接,所述驱动机驱动所述蜗杆转动。
20.通过采用上述技术方案,设置蜗轮、蜗杆和驱动机,当需要转动安装块时,控制驱动机驱动蜗杆转动,蜗杆通过与蜗轮的配合带动蜗轮转动,进而带动安装块转动,使得转动安装块更加方便。
21.可选的,所述固定底座的外侧壁上设置有钩块,所述修复气囊的外侧壁上设置有连接块,所述连接块上开设有供所述钩块穿设的锁孔,所述连接块上螺纹连接有锁紧件,所述锁紧件穿设并定位所述钩块。
22.通过采用上述技术方案,设置钩块、连接块和锁紧件,可根据管道的内径大小,选择合适尺寸的修复气囊,将固定底座上的钩块穿设修复气囊上连接块上的锁孔,接着扭转锁紧件,使锁紧件穿设钩块实现钩块与连接块之间的定位,即可实现固定底座和修复气囊之间的连接,并实现对不同内径管道的修复,提高了机器人整体的适用性。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过设置基座、液压装置和修复气囊,当需要对变形的管道进行修复时,通过驱动组件、复原件、抵接块和弹性件之间的配合以修复管道形变,至管道外形还原后,再通过修复气囊对管道进行修复,无需人工对管道的外形进行还原,减小了修复变形管道的难度,使得修复变形管道更加方便;
25.2.通过设置卡块、定位件、卡槽、弹性块、凹槽和定位槽,当安装两个复原部时,将复原部上的卡块卡入另一个复原部上的卡槽内,移动定位件,使定位部在弹性块的作用下卡入定位槽内并抵紧定位槽的内壁,即可实现两个复原部之间的安装,使得安装两个复原部更加方便;
26.3.通过设置传动组件,控制传动组件驱动安装块转动,进而带动复原件转动,使复原件对准管道待修复处并定位,无需转动机械人整体,使得调节复原件对准管道待修复处更加方便。
附图说明
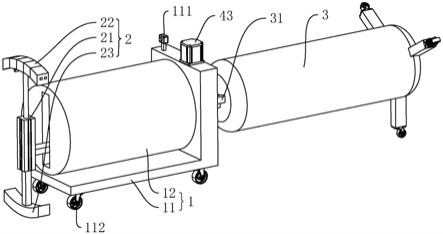
27.图1为本技术实施例的整体示意图;
28.图2为本技术实施例局部在固定底座处剖开的结构图,主要展示传动组件的结构;
29.图3为本技术实施例局部在安装块处剖开的结构图,主要展示弹性件的结构;
30.图4为本技术实施例局部的结构示意图,主要展示复原部的结构;
31.图5为本技术实施例局部在复原部处剖开的结构图,主要展示定位槽的结构;
32.图6为本技术实施例局部的结构示意图,主要展示钩块和连接块的结构。
33.附图标记说明:1、基座;11、固定底座;111、摄像头;112、滚轮;113、钩块;12、安装块;121、弹性件;2、液压装置;21、驱动组件;211、驱动件;212、滑移块;22、复原件;221、固定部;222、复原部;2221、卡槽;2222、凹槽;2223、定位槽;23、抵接块;3、修复气囊;31、连接块;311、锁孔;312、锁紧件;4、传动组件;41、蜗轮;42、蜗杆;43、驱动机;5、连接组件;51、卡块;
511、连接部;512、弯折部;52、定位件;521、滑移部;522、定位部;523、调节部;6、弹性块。
具体实施方式
34.以下结合附图1
‑
6对本技术作进一步详细说明。
35.本技术实施例公开一种液压修复机器人。参见图1,液压修复机器人包括基座1、液压装置2和修复气囊3。基座1包括固定底座11和安装块12,固定底座11的外侧壁上固定有摄像头111,摄像头111位于固定底座11的上方,且摄像头111可进行360
°
旋转。在实际使用中,在管道外侧可控制摄像头111进行旋转。固定底座11的下端面转动连接有若干滚轮112,若干滚轮112均分为两排,两排滚轮112分别位于固定底座11的相对两侧,且两排滚轮112一一对应设置。
36.参见图2,安装块12位于固定底座11水平方向上的一侧,并转动连接于固定底座11上,其转动轴线呈水平设置。固定底座11上设置有传动组件4,传动组件4包括蜗轮41、蜗杆42和驱动机43,蜗轮41和蜗杆42均转动连接于固定底座11上,蜗轮41的转动轴线垂直于滚轮112的转动轴线设置,蜗杆42的转动轴线垂直于蜗轮41的转动轴线设置,且蜗轮41的转动轴与安装块12固定连接。驱动机43固定于固定底座11的外侧壁上,驱动机43的输出轴穿设固定底座11并与蜗杆42固定连接,且驱动机43驱动蜗杆42转动。本实施例中,驱动机43为电机。
37.在实际使用中,驱动机43驱动蜗杆42转动,蜗杆42通过与蜗轮41的配合带动蜗轮41转动,进而带动安装块12转动,当安装块12转动至相应位置后,停止转动蜗杆42即可实现安装块12的定位。
38.参见图3,液压装置2包括驱动组件21、复原件22和抵接块23。驱动组件21包括滑移块212和驱动件211,滑移块212滑移连接于安装块12上,其滑移方向垂直于蜗轮41的转动轴线设置,且滑移块212远离安装块12的端部穿出安装块12设置。安装块12内固定有两个弹性件121,两个弹性件121分别位于滑移块212的相对两侧,且两个弹性件121均抵紧滑移块212的外侧壁设置。本实施例中,弹性件121为弹簧。当两侧弹性件121与滑移块212之间的作用力相互平衡时,滑移块212与安装块12之间实现相对定位。
39.参见图3,驱动件211位于滑移块212远离安装块12的一侧并与安装块12固定连接,驱动件211通过滑移块212与弹性件121的配合滑移连接于安装块12上,并可相对定位于安装块12上。复原件22和抵接块23分别位于驱动件211沿滑移块212滑移方向的相对两侧,复原件22靠近驱动件211的活塞杆设置,抵接块23与驱动件211固定连接。本实施例中,驱动件211为气缸。
40.参见图3,复原件22包括固定部221和若干复原部222,固定部221与驱动件211的活塞杆固定连接,若干复原部222均位于固定部221远离驱动件211的一侧并呈并排设置,且其中一个复原部222与固定部221固定连接。驱动件211驱动固定部221移动,其移动方向朝靠近或远离驱动件211设置。
41.参见图4,每个复原部222上均设置有连接组件5,每个连接组件5均位于对应复原部222靠近相邻复原部222的同一侧,每个连接组件5均包括卡块51和定位件52,卡块51包括连接部511和弯折部512,连接部511与对应复原部222的外侧壁固定连接,弯折部512位于连接部511远离对应复原部222的一端并与连接部511固定连接,且弯折部512与连接部511呈l
型设置。本实施例中,连接部511和弯折部512呈一体设置。
42.参见图5,每个复原部222的外侧壁上还开设有卡槽2221,卡槽2221位于对应复原部222远离连接组件5的一侧,且卡槽2221的位置对应卡块51的位置设置,卡槽2221供相邻复原部222上的卡块51卡入。
43.参见图5,定位件52位于卡块51的一侧并靠近弯折部512设置,定位件52滑移连接于对应复原部222上,其滑移方向朝靠近或远离相邻复原部222设置。每个复原部222的外侧壁上还开设有凹槽2222,凹槽2222位于卡槽2221的一侧,且凹槽2222的位置对应相邻复原部222上定位件52的位置设置,凹槽2222供相邻复原部222上的定位件52滑移卡入。凹槽2222的内壁上还开设有定位槽2223,定位槽2223位于凹槽2222靠近卡槽2221的一侧并位于凹槽2222远离其槽口的一端,凹槽2222、定位槽2223和卡槽2221连通。卡槽2221的内壁上固定有弹性块6,弹性块6位于凹槽2222、定位槽2223和卡槽2221的重叠处。本实施例中,弹性块6的材质为橡胶。
44.参见图4和图5,定位件52包括滑移部521、定位部522和调节部523,滑移部521滑移连接于对应复原部222内,定位部522靠近相邻复原部222上的凹槽2222设置并与滑移部521固定连接,且定位部522与滑移部521之间的相对位置关系对应定位槽2223和凹槽2222的相对位置关系设置,定位槽2223供相邻复原部222上的定位部522卡入。凹槽2222可供定位部522和滑移部521一起卡入。调节部523位于对应复原部222的外侧,且调节部523位于对应复原部222与其上定位部522相邻的一侧。
45.当安装两个复原部222时,将第一个复原部222上的卡块51卡入第二个复原部222上的卡槽2221内,并移动第一个复原部222,第一个复原部222带动其上卡块51在第二个复原部222上的卡槽2221内移动并抵紧卡槽2221内的弹性块6,且第一个复原部222上的弯折部512抵接卡槽2221的内壁实现限位。
46.至第一个复原部222上的滑移部521和定位部522与第二个复原部222上的凹槽2222对准,移动第一个复原部222上的调节部523,调节部523带动滑移部521和定位部522卡入第二个复原部222上的凹槽2222内,至第一个复原部222上的定位部522与第二个复原部222上凹槽2222内的定位槽2223对准,此时,第一个复原部222上的滑移部521和定位部522抵紧第二个复原部222上凹槽2222内的弹性块6设置。
47.移动第一个复原部222,使第一个复原部222带动定位部522卡入第二个复原部222上的定位槽2223内,接着,松开第一个复原部222,此时,弹性块6发生复位并挤压卡块51,带动定位部522抵紧定位槽2223靠近卡槽2221的内壁,同时,弹性块6将定位部522抵紧于定位槽2223靠近第一个复原部222上调节部523的侧壁实现定位部522的定位,即可实现两个复原部222之间的连接。复原件22上的相邻复原部222之间通过连接组件5连接。
48.当拆卸两个复原部222时,移动第一个复原部222,使第一个复原部222上的卡块51挤压第二个复原部222上的弹性块6,并使第一个复原部222上的定位部522脱离第二个复原部222上的定位槽2223,然后,保持卡块51抵紧弹性块6的情况下,松开第一个复原部222,定位部522在弹性块6复位的作用下弹出,使得第一个复原部222上的定位部522与第二个复原部222山的定位槽2223错开,将第一个复原部222取出即可实现两个复原部222的拆卸。
49.参见图1和图6,修复气囊3位于固定底座11远离液压装置2的一侧。固定底座11的外侧壁上固定有钩块113,钩块113位于固定底座11靠近修复气囊3的一侧,修复气囊3的外
侧壁上固定有连接块31,连接块31位于修复气囊3靠近固定底座11的一侧,且连接块31的位置对应钩块113的位置设置。连接块31上开设有锁孔311,锁孔311供钩块113穿设。连接块31上还螺纹连接有锁紧件312,锁紧件312位于连接块31远离修复气囊3的一侧并穿设连接块31设置,且锁紧件312靠近修复气囊3的端部位于锁孔311内。
50.在实际使用中,当钩块113穿设锁孔311后,扭转锁紧件312,使锁紧件312穿设钩块113并定位于连接块31上,即可实现钩块113与连接块31之间的定位,进而实现修复气囊3与固定底座11之间的连接。
51.本技术实施例一种液压修复机器人的实施原理为:
52.当需要对变形的管道进行修复时,根据管道待修复处的大小,对复原部222进行安装和拆卸,使得各个复原部222的宽度之和与管道待修复处的大小适配。并根据管道的大小,选择合适尺寸的修复气囊3,通过连接块31、钩块113和锁紧件312的配合完成修复气囊3与固定底座11的连接。
53.控制驱动件211驱动固定部221带动各个复原部222朝靠近抵接块23的方向移动,至复原件22和抵接块23能通过变形的管道,将机械人整体放置于管道内,通过摄像头111观察管道内部的情况,至各个复原部222与管道待修复处对准,控制驱动件211驱动固定部221带动各个复原部222朝远离抵接块23的方向移动,至复原部222抵接管道内壁,继续驱动固定部221移动,通过弹性件121的弹性配合使抵接块23相向移动,进而将变形的管道撑开以修复管道形变。
54.至管道外形还原后,控制驱动件211驱动复原件22朝靠近抵接块23的方向移动,使机械人整体能继续伸入管道内部,至修复气囊3与还原后的管道对准,通过修复气囊3对管道进行修复即可,无需人工对管道的外形进行还原,减小了修复变形管道的难度,使得修复变形管道更加方便。
55.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1