一种含机械调频式动力吸振器的准零刚度隔振装置的制作方法
1.本实用新型涉及超低频隔振技术领域,尤其涉及一种含机械调频式动力吸振器的准零刚度隔振装置。
背景技术:
2.动力吸振器是一种由质量、弹簧、阻尼等原件构成的弹簧——质量振子系统。它通过弹性元件与阻尼原件连接到主系统上,使外界激励作用在主系统上的能量全部转移到动力吸振器上,使动力吸振器作用在主系统上的作用力与外界激励作用在主系统的力大小相等、方向相反,使主系统处于平衡状态,降低主系统的振动幅度。相较于其它传统减振装置,动力吸振器不仅结构简单,制造方便,而且还具有良好的减振效果。
3.由于在实际应用中,外激励频率的大小通常是时变的,而传统“弹簧——质量块”结构动力吸振器的参数一旦选定,其固有频率也便确定,而动力吸振器固有频率与激励频率不一致时,主系统振幅将急剧增大,甚至引起共振,不能起到减振的作用。因此,有必要针对不同的激振频率来选择适当的吸振器固有频率,实现激励荷载自适应性。而机械调频式动力吸振器可以通过改变自身的结构参数来改变其等效刚度,进而实现动力吸振器固有频率的改变,以适应不同频率下的激励力,改善主系统的隔振性能。
4.常见的机械调频式动力吸振器采用的变刚度方法为空气弹簧、压电陶瓷、形状记忆合金等方法。空气弹簧动力吸振器虽然具有承载能力强、抗疲劳性好、耐用的优点,但它采用气泵作为变刚度驱动设备,需要附加较大的冗余质量,使隔振系统的整体质量增大。压电陶瓷动力吸振器的刚度较大,相对来说需要质量很大的振子,同时压电陶瓷不能受拉伸,脆性较大,从而使这种动力吸振器的振幅会很小,限制吸振能力,且可能会导致系统不稳定。形状记忆合金变刚度动力吸振器由于温度迟滞非线性,使得动力吸振器的刚度可调,但是,形状记忆合金的温度控制非常困难,给刚度调节增加了难度;而且,虽然形状记忆合金变刚度动力吸振器的固有频率可以调节,但是却是离散的,因此,不能实现刚度的连续变化,且其等效刚度的调节范围也较窄。通过对上述一些动力吸振器的分析,有必要设计一种隔振装置,使其不仅能增大动力吸振器的固有频率调节范围,还能降低主系统的起始隔振频率。
技术实现要素:
5.本实用新型目的在于提供一种含机械调频式动力吸振器的准零刚度隔振装置,用以解决上述提到的如何有效增大动力吸振器固有频率调节范围,还能降低主系统起始隔振频率的问题。通过在线性刚度主系统的基础上引入负刚度结构,基于正负刚度并联原理构成准零刚度隔振主系统,然后在传统“弹簧——质量块”结构基础上,提出“弹簧片——滑动质量块”结构自适应可调频动力吸振器,来实现动力吸振器固有频率可调节功能及降低主系统起始隔振频率的作用。
6.为解决上述技术问题,本实用新型采用了以下技术方案:
7.一种含机械调频式动力吸振器的准零刚度隔振装置,包括准零刚度隔振主系统和可调频动力吸振器子系统。
8.准零刚度隔振主系统结构由基座、负刚度机构、铰接机构、立柱、螺栓、螺母、连接件、阻尼器、承载平台以及竖直弹簧组成;所述竖直弹簧和阻尼器的上端与承载平台连接,下端与基座连接;所述竖直弹簧承受承载平台与动力吸振器的重量自由压缩;所述基座底部设置有前、后、左、右四个对称的铰接机构;所述铰接机构与负刚度机构下端连接;所述负刚度机构上端通过铰接机构与立柱连接;所述铰接机构通过螺栓螺母配合方式固接在立柱上;所述立柱通过连接件与螺栓配合作用,固定在承载平台上,改变立柱在承载平台上的位置可用来调节负刚度结构的起始角度。
9.进一步地方案为,所述负刚度机构包括左挡板、导向套、压缩弹簧、右挡板和活塞柱;所述铰接机构由左立耳板、右立耳板及螺栓组成;所述负刚度机构上、下端通过螺纹配合连接方式与所述铰接机构连接;所述负刚度机构通过活塞柱压缩内部的压缩弹簧产生作用力。
10.进一步地方案为,动力吸振器子系统结构由弹簧片、质量块、步进电机、传动丝杆、侧立板、滑台以及加速度传感器组成;所述侧立板固定在承载平台上;所述弹簧片一端固定在侧立板上,另一端设置动力吸振器质量块;所述步进电机固定在承载平台上;所述滑台在传动丝杆上滑动以调节所述弹簧片的有效长度,从而改变动力吸振器的固有频率;所述加速度传感器贴置在弹簧片上,用于采集动力吸振器子系统振动信号以便通过控制器调节步进电机的输出位移,实现滑台在传动丝杆上位置的移动。
11.进一步地方案为,所述承载平台上开设有滑槽,所述立柱安装在滑槽内。
12.与现有的技术相比,本实用新型具有如下优势:
13.本实用新型在传统的“弹簧——质量块”吸振器结构基础上,提出了“弹簧片——滑动质量块”结构的可调频动力吸振器,可以通过调整弹簧片的有效长度的方法来改变动力吸振器的固有频率,且结构简单,易于实现。并且,动力吸振器的刚度调节范围大,可以有效增大主系统的衰减区域。此外,还通过在传统主系统结构上增设四个负刚度机构,使线性刚度主系统变为准零刚度主系统,降低了隔振系统的起始隔振频率,可实现超低频隔振效果。
附图说明
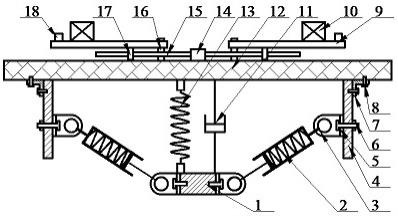
14.图1为本实用新型整体结构示意图;
15.图2为本实用新型负刚度机构结构示意图;
16.图3为本实用新型铰接机构结构示意图;
17.图4为本实用新型控制流程图;
18.图中:1-基座、2-负刚度机构、21-左挡板、22-导向套、23-压缩弹簧、24-右挡板、25-活塞柱、3-铰接机构、31-左立耳板、31-右立耳板、4-立柱、5-内六角螺栓、6-螺母、7-连接件、8-螺栓、9-弹簧片、10-质量块、11-阻尼器、12-承载平台、13-竖直弹簧、14-步进电机、15-传动丝杠、16-侧立板、17-滑台、18-加速度传感器。
具体实施方式
19.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图,对本实用新型进行进一步详细说明。
20.图1所示,为一种含机械调频式动力吸振器的准零刚度隔振装置整体结构示意图。具体包括基座1、承载平台12以及下端与基座连接,上端与承载平台连接的阻尼器11和竖直弹簧13,竖直弹簧13安装时具有一定的压缩量,用来承受承载平台12的重量而自由压缩。所述基座1底部四周对称设置有4个铰接机构3,所述铰接机构3与负刚度机构2下端通过螺纹连接;所述负刚度机构2上端与铰接机构3通过螺纹连接;所述铰接机构3通过内六角螺栓5、螺母6配合方式固接在立柱4上;所述立柱4通过连接件7与螺栓8配合作用,固定在承载平台12上,改变立柱4在承载平台12上的位置可用来调节负刚度结构2的起始角度。
21.所述侧立板16固定在承载平台12上;所述弹簧片9一端固定在侧立板16上,所述步进电机14固定在承载平台12上;所述滑台17在传动丝杆15上滑动以改变所述弹簧片9的有效长度,从而改变动力吸振器的固有频率;所述加速度传感器18贴置在弹簧片9上,用于采集动力吸振器子系统振动信号以便通过控制器调节步进电机14的输出位移,实现滑台17在传动丝杆15上位置的移动。
22.将“弹簧片——滑动质量块”结构动力吸振器通过侧立板16安装在主系统上。当有外界激励作用时,外界激励由主系统传递到侧立板16上,然后经弹簧片9将载荷传递到质量块10上。质量块10产生的动力作用将作用在主系统上的外界激励力抵消掉,从而抑制主系统的振动响应。动力吸振器通过改变质量块10与滑台17之间的距离(即有效长度)来对弹簧片9的刚度进行调节,从而改变其固有频率。
23.本实用新型的工作过程是:如图所示,当承载平台12上未放置被隔振体时,负刚度机构2处于倾斜状态;当承载平台12上放置被隔振体时,竖直弹簧13与负刚度机构2内部的压缩弹簧23都会被压缩,调节立柱4的位置使主系统满足零刚度条件;然后通过加速度传感器18及控制系统来实时调节系统参数,使得动力吸振器固有频率实时跟踪外界荷载的频率,实现荷载的自适应性,其控制流程图如图4示。
24.具体控制过程为,通过加速度传感器18对主系统和动力吸振器系统振动信号进行实时采集,并对采集到的信号进行傅里叶变换得到激振频率及动力吸振器固有频率,设置一个阈值频率,其目的为允许系统存在一定的测量误差,然后比较激振频率与吸振器固有频率的绝对差值与阈值的关系,通过控制系统对频率信号分析处理,控制步进电机14的移动,使滑台17在传动丝杆15上滑动,来改变弹簧片9的有效长度,从而控制动力吸振器的刚度,实现对动力吸振器固有频率的调节,使得动力吸振器的固有频率跟踪激励频率实时调整。
25.以上内容是结合具体附图对本实用新型做出的优选实施方式,本实用新型的具体实现不受上述实施方式的限制。应当指出,在不脱离本实用新型技术原理的前提下,还可做出改进或变型,这些改进或变型都应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1