一种远程手动阀操作装置的制作方法
1.本实用新型属于阀门工具领域,涉及一种拆装简单,操作方便、适合远程操作手动阀的操作装置。本实用新型可以避免人员进入地下井、坑等密闭空间或者受限空间去操作手动阀门的问题。
背景技术:
2.酒店、宿舍等区域的给排水管道安装有大量的手动阀,并且手动阀位于井、坑等密闭或者受限空间。进入密闭或者受限空间前需要进行测氧,进行强迫通风使空气浓度达到要求。之后根据需要可能需要设置脚手架,需要设置速差器,人员佩戴安全实施进入密闭空间去操作阀门,同时还要设置监护人员。流程复杂,配套安全设施、设备多,投入人员多,要求资质多。
3.专利公开号为cn205078898u的中国实用新型专利于2016年03月09日公开了一种远距离阀门开关工具,包括加长杆、手柄、固定盘,固定盘的外侧面上设有固定爪,固定爪沿固定盘3的圆周均匀分布。使用时,根据操作位置与阀门之间的距离,调节加长杆的长度,然后将加长杆伸至阀门位置,将固定爪穿入阀门手轮的格挡间隙,转动手柄,使固定爪带动阀门手轮转动,控制手柄的转动速度以使阀门匀速启闭。
4.又如专利公开号为cn206159624u的中国实用新型专利于2017年05月10日公开了一种用于远距离阀门的开关手柄,包括伸缩杆、叉头和手柄,所述伸缩杆包括依次连接的顶端支杆、中间支杆和底端支杆,手柄与底端支杆相连,叉头与顶端支杆相连;顶端支杆与叉头之间设有电灯,所述底端支杆的底部设有电池和开关,导线设在伸缩杆内部空腔中,电池和电灯通过导线相连。本实用新型能根据需要调节伸缩杆的长短,且具有照明功能,电动旋转叉头能够简单省力的控制远距离阀门,操作简单,方便实用。
5.但是手动阀门的操作端具有不同类型,利于有手轮状的,有手柄状的,手轮状的又分为轮状里面有三根横杆和一根横杆类型等,现有技术中的这些远程操作阀门的工具,无法根据需要更换固定手动阀门的固定头,例如无法更换上述的固定爪和叉头。
技术实现要素:
6.为了有避免人员进入井、坑等密闭空间或者受限空间去操作手动阀门,本实用新型是一种操作简单,适合远距离操作位于井、坑等密闭空间或者受限空间中手动阀门的操作装置,能够避免将人员进入井、坑等密闭空间或者受限空间。
7.本实用新型采用如下的技术方案:
8.一种远程手动阀操作装置,包括可调节长度的操作杆、设置在所述操作杆一端的操作头、设置在所述操作杆另一端的阀门固定头,所述阀门固定头包括操作杆连接部、用于接触式连接手动阀的手动阀连接部以及连接所述操作杆连接部和所述手动阀连接部的连杆,所述操作杆连接部为具有内腔的圆筒状,其壁上开有相对的两个螺孔,所述操作杆的下部可插入内腔,且在操作杆下部开有与所述螺孔对应的横向贯穿孔,所述操作杆与所述操
作杆连接部之间通过螺栓与螺母进行可拆卸连接。
9.上述技术方案中,通过可拆卸设置阀门固定头,可以根据不同的阀门手轮类型来更换手动阀连接部,并且连接通过螺栓螺母和螺孔,更换方便。装置整体结构简单,操作方便。
10.作为优选,所述手动阀连接部设置有u型爪,通过u型爪对手动阀的操作手轮进行固定,不易滑脱。
11.作为优选,所述手动阀连接部设置有三个u型爪,且沿着圆筒状的所述操作杆连接部的圆周方向上均匀分布。
12.作为优选,所述手动阀连接部设置有两个u型爪,且两个u型爪对称设置在圆筒状的所述操作杆连接部的中心的直线上。
13.作为优选,所述操作杆包括若干根,且相互之间可拆卸连接。可以根据井、坑的深度,选择一个或者多个操作杆,确保操作高度合适。
14.作为优选,所述操作杆包括主体段和位于所述主体段顶端的连接段,所述连接段为内空结构,且所述连接段的内径大于所述主体段的外径,所述操作头与所述连接段连接,相邻的所述操作杆之间通过前一根操作杆的主体段与后一根操作杆的连接段进行连接。
15.作为优选,所述连接段设置有螺纹孔,所述主体段也设置有螺纹孔,相邻的所述操作杆之间通过所述螺纹孔和螺栓、螺母进行连接。
16.作为优选,所述主体段的外表面上设置有定位凸块,所述连接段设置有与所述定位凸块适配的定位凹槽。通过定位凸块和定位凹槽的对应,来找准螺纹孔的对应位置,方便操作杆之间的连接。
17.作为优选,所述阀门固定头的操作杆连接部外表面也设置有定位凹槽,与主体段的外表面上设置有定位凸块适配。
18.作为优选,所述u型爪的两个内壁上均设置有弧形的弹性片,两片所述弹性片相对设置,且向彼此隆起。现有的远程开关工具在使用时,其固定抓是穿过阀门手轮的格挡间隙,转动操作时不稳定,固定爪容易从阀门手轮间隔滑脱。本方案通过在u型爪将阀门手轮的横杆卡入,并通过弹性片限制u型爪脱离阀门手轮。
19.通过实施上述技术方案,本实用新型提供的操作装置,适合远距离操作位于井、坑等密闭空间或者受限空间中手动阀门的操作装置,能够避免将人员进入井、坑等密闭空间或者受限空间。而且对手动阀门的控制稳定,扭矩传递到位。
附图说明
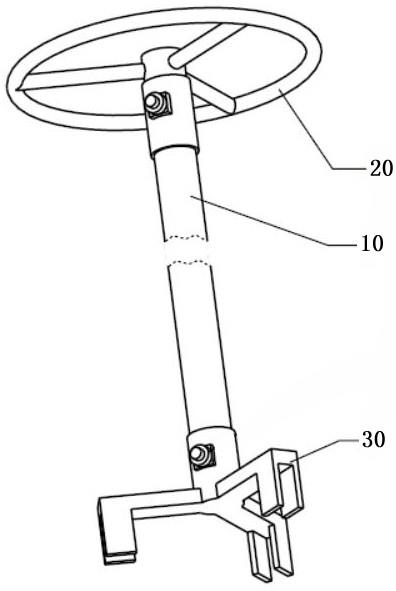
20.附图1为本实用新型一实施例的结构示意图;
21.附图2为本实用新型一实施例中阀门固定头的结构示意图;
22.附图3为本实用新型一实施例中操作杆的结构示意图;
23.附图4为本实用新型另一实施例中u型爪的结构示意图。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.实施例1:
26.一种远程手动阀操作装置,如附图1所示,包括操作杆10、通过螺钉固定在所述操作杆10一端的操作头20、可拆卸设置在所述操作杆10另一端的阀门固定头30。均采用不锈钢材质。
27.所述操作杆10如附图3所示,包括若干根,可以根据井、坑的深度,选择一个或者多个操作杆10,确保操作高度合适。所述操作杆10的结构如附图3所示,包括主体段12和位于所述主体段12顶端的连接段11,所述连接段11为内空结构,且所述连接段11的内径大于所述主体段12的外径,所述操作头20与所述连接段11连接,相邻的所述操作杆10之间通过前一根操作杆10的主体段12插入后一根操作杆10的连接段11内进行连接。
28.在本实施例中,所述连接段11开有横向贯穿的螺纹孔,所述主体段12也同样设置有螺纹孔,相邻的所述操作杆10之间通过所述螺纹孔和螺栓、螺母进行连接。所述操作头20与所述连接段11之间也通过螺纹孔和螺栓、螺母的方式进行连接。
29.在本实施例中,所述主体段12的外表面上设置有定位凸块121,所述连接段11设置有与所述定位凸块121适配的定位凹槽111。通过定位凸块121和定位凹槽111的对应,来找准螺纹孔的对应位置,方便操作杆10之间的连接。所述阀门固定头30的操作杆连接部31外表面也设置有定位凹槽111,当阀门固定头30与操作杆10连接时,定位凹槽111与主体段12上的定位凸块121对准进行定位。
30.所述阀门固定头30如附图2所示,包括操作杆连接部31、用于接触式连接手动阀的手动阀连接部32以及连接所述操作杆连接部31和所述手动阀连接部32的连杆33,所述操作杆连接部31为具有内腔的圆筒状,其壁上开有相对的两个螺孔,最后一根所述操作杆10的下部可插入内腔,且在操作杆10下部开有与所述螺孔对应的横向贯穿孔,所述操作杆10与所述操作杆连接部31之间通过螺栓与螺母进行可拆卸连接。连杆33手动阀连接部32之间焊接,与操作杆连接部31之间也焊接方式进行连接。
31.所述手动阀连接部32设置有u型爪,通过u型爪对手动阀的操作手轮进行固定,不易滑脱。为了适用于不同类型的阀门手轮,u型爪可以设置为三个,且沿着圆筒状的所述操作杆连接部31的圆周方向上均匀分布。也可以设置为两个且两个u型爪对称设置在圆筒状的所述操作杆连接部31的中心的直线上。
32.远程手动阀操作装置拼装完成后将u型爪放在位于井、坑中的手动阀上,顺势针或者逆时针转动远程手动阀操作装置即可实现开、关手动阀。
33.实施例2:
34.一种远程手动阀操作装置,包括操作杆10、通过螺钉固定在所述操作杆10一端的操作头20、可拆卸设置在所述操作杆10另一端的阀门固定头30。均采用不锈钢材质。操作杆10采用现有技术中长度可以调节的伸缩杆,根据不同深度进行调节。操作头20采用的是操作手轮。
35.所述阀门固定头30包括操作杆连接部31、手动阀连接部32以及连接所述操作杆连接部31和所述手动阀连接部32的连杆33,所述操作杆连接部31为具有内腔的圆筒状,其壁上开有相对的两个螺孔,所述操作杆10的下部可插入内腔,且在操作杆10下部开有与所述
螺孔对应的横向贯穿孔,所述操作杆10与所述操作杆连接部31之间通过螺栓螺母配合螺孔和贯穿孔进行可拆卸连接。连杆33手动阀连接部32之间焊接,与操作杆连接部31之间也焊接方式进行连接。
36.所述手动阀连接部32设置有u型爪,通过u型爪对手动阀的操作手轮进行固定,不易滑脱。u型爪设置为三个,且沿着圆筒状的所述操作杆连接部31的圆周方向上均匀分布。
37.实施例3:
38.与实施例1的不同在于,所述u型爪的两个内壁上均设置有弧形的弹性片321,两片所述弹性片321相对设置,且向彼此隆起,如附图4所示。插入阀门手轮时,阀门手轮的横杆沿着弧形片滑入,一旦滑入后,弧形弹性片的隆起部分会限制阀门手轮的横杆滑出,当完成阀门开关后,用力向外拔操作装置,由于有一定力度,阀门手轮的横杆沿着弧形弹性片滑出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1