基于悬臂式掘进机巷道三维模型点云调节装置的制作方法
1.本实用新型涉及三维模型点云绘制用调节装置技术领域,具体涉及基于悬臂式掘进机巷道三维模型点云调节装置。
背景技术:
2.悬臂式掘进机是一种能够实现截割、装载运输、自行走及喷雾除尘的联合机组。随着回采工作面综合采煤机械化的快速发展,煤矿对巷道掘进速度要求越来越高。为了提高采准巷道的速度,防止掘进机空转截割,需要及时的绘制掘进巷道内的三维模型,以达到精准截割。
3.但是悬臂式掘进机为单臂掘进,而目前的三维激光扫描装置直接固定在掘进机上,不能伸长,不能准确的扫描掘进的巷道内的情况,这样就不能精准的绘制三维模型云点,有可能使得掘进机空转。
技术实现要素:
4.鉴于现有技术中的上述缺陷或不足,期望提供一种基于悬臂式掘进机巷道三维模型点云调节装置。
5.根据本技术实施例提供的技术方案,基于悬臂式掘进机巷道三维模型点云调节装置,包括底板、第一层伸缩板、第二层伸缩板、第三层伸缩板、三维激光扫描装置放置板和三维激光扫描装置,
6.所述底板为水平横向放置的长方形板块,所述第一层伸缩板固定在所述底板的上端面上,所述第一层伸缩板、所述第二层伸缩板、所述第三层伸缩板和所述三维激光扫描装置放置板为从下至上的放置顺序,
7.所述第一层伸缩板包括板体a、旋转电机a、旋转齿轮a和“凸”字型凹槽a,所述板体a为水平横向放置的长方形板块,所述旋转电机a固定在所述板体a前端面的右端部位,所述旋转齿轮a位于所述板体a上端面右端部位的旋转齿轮放置凹槽内,所述旋转电机a的电机轴穿过所述板体a与所述旋转齿轮a固定连接,两个所述“凸”字型凹槽a分别位于所述旋转齿轮a前侧和后侧的所述板体a的上端面上,
8.所述第二层伸缩板包括板体b、旋转电机b、旋转齿轮b、“凸”字型凹槽b、齿条轮齿b和“凸”字型凸起b,所述板体b为水平横向放置的长方形板块,所述旋转电机b位于所述板体b前端面的右端部位,所述旋转齿轮b位于所述板体b上端面右端部位的旋转齿轮放置凹槽内,所述旋转电机b固定连接所述旋转齿轮b,两个所述“凸”字型凹槽b分别位于所述旋转齿轮b前侧和后侧的所述板体b的上端面上,所述齿条轮齿b位于所述板体b的下端面,若干个所述齿条轮齿b排列为一条直线,两个所述“凸”字型凸起b分别位于所述齿条轮齿b前侧和后侧的所述板体b的下端面,
9.所述旋转电机a与所述齿条轮齿b啮合,所述“凸”字型凸起b放置在所述“凸”字型凹槽a内,
10.所述第二层伸缩板和所述第三层伸缩板相同,所述第三层伸缩板包括板体c、旋转电机c、旋转齿轮c、“凸”字型凹槽c、齿条轮齿c和“凸”字型凸起c,所述旋转电机c、所述旋转齿轮c、所述“凸”字型凹槽c、所述齿条轮齿c、所述“凸”字型凸起c与所述板体c的固定位置与所述第二层伸缩板的固定位置相同,
11.所述旋转电机b与所述齿条轮齿c啮合,所述“凸”字型凸起c放置在所述“凸”字型凹槽b内,
12.所述三维激光扫描装置放置板包括板体d、齿条轮齿d和“凸”字型凸起d,所述板体d为水平横向放置的长方形板块,所述齿条轮齿d位于所述板体d的下端面,若干个所述齿条轮齿d排列为一条直线,两个所述“凸”字型凸起d分别位于所述齿条轮齿d前侧和后侧的所述三维激光扫描装置放置板的下端面上,所述旋转齿轮c与所述齿条轮齿d啮合,所述“凸”字型凸起d放置在所述“凸”字型凹槽c内,
13.所述三维激光扫描装置固定在所述三维激光扫描装置放置板上端面的右端部位。
14.本实用新型中,所述“凸”字型凹槽a、所述“凸”字型凹槽b和所述“凸”字型凹槽c相同。
15.本实用新型中,所述“凸”字型凸起b、所述“凸”字型凸起c和所述“凸”字型凸起d均相同。
16.本实用新型中,所述“凸”字型凸起b的长度小于所述“凸”字型凹槽a的长度。
17.本实用新型中,所述“凸”字型凹槽a的长度小于所述板体a的长度。
18.本实用新型中,所述第一层伸缩板、所述第二层伸缩板、所述第三层伸缩板和所述三维激光扫描装置放置板的长度相同,所述第一层伸缩板、所述第二层伸缩板、所述第三层伸缩板和所述三维激光扫描装置放置板的宽度相同。
19.综上所述,本技术的有益效果:本技术装置提供一种伸缩装置,占用空间小,利于三维激光扫描装置伸长进入巷道。
附图说明
20.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
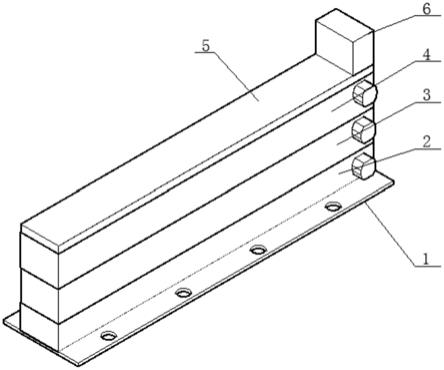
21.图1为本实用新型整体装置的立体结构示意图;
22.图2为本实用新型第一层伸缩板的剖视结构示意图;
23.图3为本实用新型第二层伸缩板的剖视结构示意图;
24.图4为本实用新型第三层伸缩板的剖视结构示意图;
25.图5为本实用新型三维激光扫描装置放置板的剖视结构示意图。
26.图中标号:底板-1;第一层伸缩板-2;板体a-2.1;旋转电机a-2.2;旋转齿轮a-2.3;“凸”字型凹槽a-2.4;第二层伸缩板-3;板体b-3.1;旋转电机b-3.2;旋转齿轮b-3.3;“凸”字型凹槽b-3.4;齿条轮齿b-3.5;“凸”字型凸起b-3.6;第三层伸缩板-4;板体c-4.1;旋转电机c-4.2;旋转齿轮c-4.3;“凸”字型凹槽c-4.4;齿条轮齿c-4.5;“凸”字型凸起c-4.6;三维激光扫描装置放置板-5;板体d-5.1;齿条轮齿d-5.2;“凸”字型凸起d-5.3;三维激光扫描装置-6。
具体实施方式
27.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
28.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
29.如图1所示,基于悬臂式掘进机巷道三维模型点云调节装置,包括底板1、第一层伸缩板2、第二层伸缩板3、第三层伸缩板4、三维激光扫描装置放置板5和三维激光扫描装置6,所述底板1为水平横向放置的长方形板块,所述第一层伸缩板2固定在所述底板1的上端面上,所述第一层伸缩板2、所述第二层伸缩板3、所述第三层伸缩板4和所述三维激光扫描装置放置板5为从下至上的放置顺序,所述旋转电机a2.2与所述齿条轮齿b3.5啮合,所述“凸”字型凸起b3.6放置在所述“凸”字型凹槽a2.4内,所述旋转电机b3.2与所述齿条轮齿c4.5啮合,所述“凸”字型凸起c4.6放置在所述“凸”字型凹槽b3.4内,所述三维激光扫描装置6固定在所述三维激光扫描装置放置板5上端面的右端部位。
30.如图2所示,所述第一层伸缩板2包括板体a2.1、旋转电机a2.2、旋转齿轮a2.3和“凸”字型凹槽a2.4,所述板体a2.1为水平横向放置的长方形板块,所述旋转电机a2.2固定在所述板体a2.1前端面的右端部位,所述旋转齿轮a2.3位于所述板体a2.1上端面右端部位的旋转齿轮放置凹槽内,所述旋转电机a2.2的电机轴穿过所述板体a2.1与所述旋转齿轮a2.3固定连接,两个所述“凸”字型凹槽a2.4分别位于所述旋转齿轮a2.3前侧和后侧的所述板体a2.1的上端面上。
31.如图3所示,所述第二层伸缩板3包括板体b3.1、旋转电机b3.2、旋转齿轮b3.3、“凸”字型凹槽b3.4、齿条轮齿b3.5和“凸”字型凸起b3.6,所述板体b3.1为水平横向放置的长方形板块,所述旋转电机b3.2位于所述板体b3.1前端面的右端部位,所述旋转齿轮b3.3位于所述板体b3.1上端面右端部位的旋转齿轮放置凹槽内,所述旋转电机b3.2固定连接所述旋转齿轮b3.3,两个所述“凸”字型凹槽b3.4分别位于所述旋转齿轮b3.3前侧和后侧的所述板体b3.1的上端面上,所述齿条轮齿b3.5位于所述板体b3.1的下端面,若干个所述齿条轮齿b3.5排列为一条直线,两个所述“凸”字型凸起b3.6分别位于所述齿条轮齿b3.5前侧和后侧的所述板体b3.1的下端面。
32.如图4所示,所述第二层伸缩板3和所述第三层伸缩板4相同,所述第三层伸缩板4包括板体c4.1、旋转电机c4.2、旋转齿轮c4.3、“凸”字型凹槽c4.4、齿条轮齿c4.5和“凸”字型凸起c4.6,所述旋转电机c4.2、所述旋转齿轮c4.3、所述“凸”字型凹槽c4.4、所述齿条轮齿c4.5、所述“凸”字型凸起c4.6与所述板体c4.1的固定位置与所述第二层伸缩板3的固定位置相同。
33.如图5所示,所述三维激光扫描装置放置板5包括板体d5.1、齿条轮齿d5.2和“凸”字型凸起d5.3,所述板体d5.1为水平横向放置的长方形板块,所述齿条轮齿d5.2位于所述板体d5.1的下端面,若干个所述齿条轮齿d5.2排列为一条直线,两个所述“凸”字型凸起d5.3分别位于所述齿条轮齿d5.2前侧和后侧的所述三维激光扫描装置放置板5的下端面上,所述旋转齿轮c4.3与所述齿条轮齿d5.2啮合,所述“凸”字型凸起d5.3放置在所述“凸”字型凹槽c4.4内。
34.所述第二层伸缩板3可通过所述旋转电机a2.2在所述第一层伸缩板2上移动,所述第三层伸缩板4可通过所述旋转电机b3.2在所述第二层伸缩板3上移动,所述三维激光扫描装置放置板5可通过所述旋转电机c4.2在所述第三层伸缩板4上移动。
35.使用时,将本技术装置通过所述底板1安装在掘进机的机械臂上,当需要对巷道进行三维扫描时,先调节掘进机掘进头的倾斜角度,然后通过所述旋转电机a2.2、所述旋转电机b3.2和所述旋转电机c4.2的作用,将所述第二层伸缩板3、所述第三层伸缩板4和所述三维激光扫描装置放置板5相对移动,将所述三维激光扫描装置6送进巷道中进行三维扫描。
36.缩回时,将通过所述旋转电机a2.2、所述旋转电机b3.2和所述旋转电机c4.2的反向作用,使得所述第二层伸缩板3、所述第三层伸缩板4和所述三维激光扫描装置放置板5叠置。
37.以上描述仅为本技术的较佳实施例以及对所运用技术原理等方案的说明。同时,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1