一种转轴结构以及电子设备的制作方法
1.本技术涉及电子产品技术领域,尤其涉及一种转轴结构以及电子设备。
背景技术:
2.电子设备例如笔记本电脑,其显示侧和键盘侧通过转轴结构转动连接,当前转轴结构通常为干摩擦阻尼结构,但目前的笔记本电脑在打开时阻尼较大,用户的使用体验不佳。
技术实现要素:
3.本技术实施例提供了一种转轴结构以及电子设备,至少在打开时阻尼较小,以提升产品提升产品使用体验。
4.一方面,本技术实施例提供了一种连转轴结构,用于实现第一部件和第二部件的相对转动,转轴结构包括扭簧组件和用于与第一部件固定的芯轴,扭簧组件至少包括扭簧,扭簧包括第一臂和第二臂,扭簧套装于芯轴并且第一臂固连芯轴,第二臂用于与第二部件固连,第二部件相对第一部件在第一位置和第二位置之间往复转动,并且扭簧处于自由状态的位置位于第一位置和第二位置之间。
5.本实施例中,当扭簧自第三位置向第一位置或第二位置侧转动时,操作人员的外力和笔记本显示侧的重力对扭簧作功,转动角度越大,扭簧蓄能越大,即相当于笔记本显示侧的重力转化为扭簧的弹性力。当扭簧自第一位置或者第二位置向第三位置运动时,扭簧的弹性能量将逐渐释放转化为扭转力矩作功。以笔记本电脑自第一位置转动至第三位置为例,当笔记本电脑位于第一位置时,扭簧的弹性能量最大,相应扭簧能够提供的转动力矩也就最大,此时操作人员只需要施加较小的力就能克服笔记本电脑的显示侧的重力相对芯轴的力矩,打开笔记本电脑的显示侧,降低了笔记本电脑开启阻力,提高了用户的使用体验感。
6.基于一方面,本技术实施例还提供了一方面的第一种实施方式:
7.至少在第一位置和第二位置之间的部分角度位置,扭簧组件相对芯轴的力矩大小与第二部件的重力相对芯轴的力矩大小差值在预定范围内。预定范围可以为零,也可以为处于零附近的数值,这样操作人员施加于第二部件的力f
开
接近零,即操作人员只用施加很小的力就能在第一位置和第二位置之间转动第二部件,这样有利于操作人员单手开启或者关闭电子设备,提高电子设备开启灵活性。
8.基于一方面的第一种实施方式,本技术实施例还提供了一方面的第二种实施方式:
9.至少在第一位置和第二位置之间的部分角度位置,扭簧组件相对芯轴的力矩与第二部件的重力相对芯轴的力矩大小相同,方向相反。该实施例中,在满足开启力比较小的同时,第二部件可以相对第一部件停留着部分角度位置,提高使用方便性。
10.基于一方面的第二种实施方式,本技术实施例还提供了一方面的第三种实施方
式:
11.扭簧为刚度随转动角度变化的结构,以便至少在第一位置和第二位置之间的部分角度位置,扭簧相对芯轴的力矩与第二部件的重力相对芯轴的力矩二者大小之差在预定范围、方向相反。该实施方式中将扭簧的刚度设计为变刚度,以与第二部件重力力矩匹配设计,这样仅以扭簧就能实现第二部件在转动过程中阻尼小或基本无阻尼的技术效果,转轴结构零部件比较少,重量轻。
12.基于一方面的第三种实施方式,本技术实施例还提供了一方面的第四种实施方式:
13.转轴结构包括固定支架和转动支架,芯轴固定于固定支架,转动支架具有安装孔,安装孔转动安装于芯轴,扭簧至少部分位于安装孔内部,第一臂和第二臂分别与固定支架和转动支架固定连接,固定支架具有与第一部件配合固定的第一安装结构,转动支架具有与第二部件配合固定的第二安装结构。该转轴结构在实现芯轴固定的前提下,结构简单,重量轻。
14.基于一方面的第二种实施方式,本技术实施例还提供了一方面的第五种实施方式:
15.扭簧的刚度值恒定,扭簧组件还包括至少一个摩擦单元,每一个摩擦单元包括能够配合产生摩擦力的第一部分和第二部分,第一部分与芯轴至少周向限位,第二部分用于与第二部件固定且与芯轴转动连接,摩擦单元的摩擦力随转动角度变化,以便由扭簧处于自由状态的位置朝向第一位置或者第二位置转动过程中,各摩擦单元相对芯轴的摩擦力矩与扭簧相对芯轴的扭转力矩之和,与第二部件的重力相对芯轴的力矩大小之差在预定范围、方向相反。
16.该实施方式中,转轴结构除了设置恒刚度的扭簧之外,还进一步设置有摩擦单元,摩擦单元中摩擦力随转动角度变化,通过摩擦力的变化补偿扭簧与重力二者转矩的差值,使由扭簧处于自由状态的位置朝向第一位置或者第二位置转动过程中,各摩擦单元相对芯轴的摩擦力矩与扭簧相对芯轴的扭转力矩之和,与第二部件的重力相对芯轴的力矩大小之差在预定范围、方向相反。该转轴结构易于加工。
17.基于一方面的第五种实施方式,本技术实施例还提供了一方面的第六种实施方式:
18.第一部分包括第一摩擦片和第二摩擦片,第二摩擦片的第一侧面与第一摩擦片配合摩擦接触,第二侧面与第二部分相对,并且第二部分与第二侧面相对的表面和第二侧面均为凸凹结构面,以配置形成随转动角度变化的摩擦力。
19.该实施方式中第一摩擦片和第二摩擦片之间摩擦力的大小可以根据第二部分和第二侧面相对的两表面转动配合位置而定,即通过设置第二侧面和与其相对的第二部分的表面形状能够配置形成摩擦单元随转动角度变化的摩擦力。
20.基于一方面的第六种实施方式,本技术实施例还提供了一方面的第七种实施方式:
21.转轴结构还包括固定支架,芯轴安装于固定支架,固定支架设置有与第一部件固定的安装结构,摩擦单元还包括弹簧,弹簧套装于芯轴并且压装于第一摩擦片和固定支架之间。这样可以通过弹簧施加预紧力于第一摩擦片和第二摩擦片,以产生相应摩擦力。
22.基于一方面的第六种实施方式,本技术实施例还提供了一方面的第七种实施方式:
23.转轴结构还包括螺母,固定支架包括第一支撑壁和第二支撑壁,第一支撑壁和第二支撑壁具有同轴通孔,芯轴的一端部固定与第一支撑壁的通孔内部,另一端部穿过第二支撑壁上的通孔与螺母螺纹配合。该转轴结构重量轻。
24.基于一方面的第五种至第七种任一实施方式,本技术实施例还提供了一方面的第八种实施方式:
25.摩擦单元的数量为两个,两个摩擦单元的第二部分为同一构件,两个摩擦单元的第一部分对称位于构件的两侧。该实施例中两个摩擦单元中产生摩擦力的第一摩擦片和第二摩擦片关于构件对称布置,实现芯轴的受力稳定与平衡。
26.基于一方面至第一方面的第八种实施方式,本技术实施例还提供了一方面的第九种实施方式:
27.第一位置和第二位置之间的夹角范围为170
°
至180
°
,扭簧处于自由状态的位置相对第一位置的夹角为70
°
至95
°
。第一位置和第二位置的夹角可以为180
°
,扭簧处于自由状态的位置相对第一位置夹角为90
°
。
28.第二方面,本技术实施例提供了一种电子设备,包括第一部件和第二部件,第一部件和第二部件通过上述中任一实施方式中的转轴结构连接,以实现相对转动。
29.该电子设备的技术效果与上述一方面所提供的转轴结构的技术效果类似,为节约篇幅,在此不再赘述。
30.基于第二方面,本技术实施例还提供了第二方面的第一种实施方式:
31.电子设备为笔记本电脑,笔记本电脑的显示侧和键盘侧中,一者为第一部件,另一者为第二部件。
附图说明
32.图1为本技术一种实施例所提供转轴结构应用于电子设备中的示意图;
33.图2为本技术一种实施例中电子设备的三个转动位置的示意图;
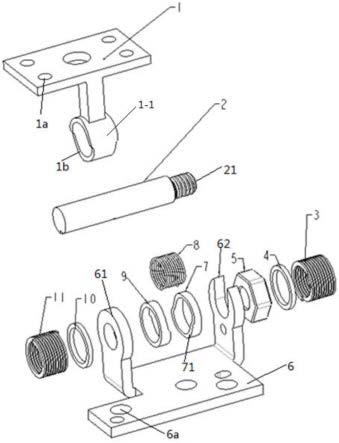
34.图3为本技术第一种实施例所提供转轴结构的分解示意图;
35.图4为图3所示转轴结构的组装示意图;
36.图5为本技术一种实施例中扭簧力矩与第二部件力矩示意图;其中横坐标为第二部件相对水平面的转动角度,纵坐标为力矩;
37.图6为本技术第二种实施例所提供转轴结构的分解示意图;
38.图7为图6所示转轴结构的组装示意图;
39.图8为本技术一种实施例中的扭簧的中径分布图。
具体实施方式
40.以下,术语“第一”、“第二”等仅用于描述目的,而不能理解指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。
41.本技术实施例提供的电子设备,可以是手机、平板电脑、可穿戴设备、车载设备、增
强现实(augmented reality,ar)/虚拟现实(virtual reality,vr)设备、笔记本电脑、超级移动个人计算机(ultra-mobile personal computer,umpc)、上网本、个人数字助理(personal digital assistant,pda)等移动终端,或者,也可以是数码相机、单反相机/微单相机、运动摄像机、云台相机、无人机等专业的拍摄设备,本技术实施例对电子设备的具体类型不作限制,为了方便理解,以下以电子设备为笔记本电脑进行说明。
42.本技术实施例提供一种转轴结构,转轴结构用于实现第一部件和第二部件的相对转动,第一部件和第二部件可以是任何需要进行相对转动的部件,可以是电子设备转动连接的两个部分,比如,第一部件和第二部件中的一者可以是笔记本的显示侧,另一者是笔记本的键盘侧,当然,第一部件和第二部件中的一者也可以是折叠式手机的显示侧,另一者是折叠式手机的键盘侧。电子设备只要具有相对转动的两个部件,都可以采用本实施例中的转轴结构实现转动。
43.请参考图1,图1为本技术一种实施例所提供转轴结构应用于电子设备中的示意图,其中图1中a表示转轴结构安装位置。
44.电子设备包括相对转动的第一部件100和第二部件200,图1中电子设备以笔记本电脑为例示意,图1中示意出电子设备的第一部件100为笔记本电脑的显示侧,第二部件200 为笔记本电脑的键盘侧,转轴结构300实现显示侧和键盘侧的转动连接。
45.请参考图2,图2为本技术第一种实施例所提供转轴结构的示意图。
46.转轴结构包括扭簧组件和芯轴2,扭簧组件至少包括扭簧8,扭簧8为螺旋弹簧的一种,其两端具有外伸用于与相对转动的两部件连接的第一臂和第二臂,第一臂和第二臂的外伸长度和结构形式本文不做限定,可以根据其应用电子设备的具体结构进行合理配置。
47.在该转轴结构中扭簧8套装于芯轴2,扭簧8的第一臂固连芯轴2,扭簧8和芯轴2 可以同轴设置,这样扭簧8可以围绕芯轴2的轴线进行转动。扭簧8的第二臂用于与第二部件固定连接。具体应用到电子设备时,第一臂和第二臂中,一者与电子设备的第一部件 100固定,另一者与电子设备的第二部件200固定,这样,扭簧8相对芯轴2相对转动时,可带动对应的第一部件100和第二部件200相对转动,图1中,第一臂和芯轴2二者均与笔记本电脑的键盘侧固定,第二臂和笔记本电脑的显示侧固定,显然,芯轴2、第一臂和笔记本电脑的显示侧固定,第二臂和笔记本电脑的键盘侧固定也可以。
48.芯轴2和扭簧8二者适配转动即可,二者之间可以具有预定间隙,当然二者之间也可以没有间隙,只要不影响扭簧8的转动即可。
49.该实施例中第二臂相对第一臂在第一位置和第二位置之间往复转动,并且第二臂相对第一臂转动至第三位置时,扭簧8处于自由状态,第三位置位于第一位置和第二位置之间。当该转轴结构300安装于电子设备时,电子设备的第一部件100和第二部件200可随扭簧 8在第一位置和第二位置之间往复转动,扭簧8处于自由状态的位置位于第一位置和第二位置之间。在一种具体示例中,第一位置可以为笔记本电脑的显示侧和键盘侧闭合的位置,第二位置可以为显示侧和键盘侧大致呈180
°
的位置,第三位置可以为显示侧和键盘侧夹角大致为90
°
的位置。这样当扭簧8自第三位置向第一位置或第二位置侧转动时,操作人员的外力和笔记本显示侧的重力对扭簧8作功,转动角度越大,扭簧8蓄能越大,即相当于笔记本显示侧的重力转化为扭簧8的弹性力。当扭簧8自第一位置或者第二位置向第三位置运动时,扭簧8的弹性能量将逐渐释放转化为扭转力矩作功。以笔记本电脑自第一位置转动至第三
位置为例,当笔记本电脑位于第一位置时,扭簧8的弹性能量最大,相应扭簧8能够提供的转动力矩也就最大,此时操作人员只需要施加较小的力就能克服笔记本电脑的显示侧的重力相对芯轴2的力矩,打开笔记本电脑的显示侧,降低了笔记本电脑开启阻力,提高了用户的使用体验感。
50.当然,第一位置和第二位置之间的夹角不局限于上述180
°
,二者之间的范围可以为 170
°
至180
°
,同理扭簧8处于自由状态的位置也并非局限于90
°
,扭簧8处于自由状态时,第二部分相对第一位置的夹角可以为70
°
至95
°
。请参考图2,本文以第一位置为 0
°
位置,即第一部件100处于水平,第二部件200与第一部件100之间的夹角为0
°
,第二位置为180
°
位置,即第二部件200相对第一部件100展开180
°
,第三位置为90
°
位置,即第二部件200相对第一部件100转动至竖直位置,为例,继续介绍技术方案和技术效果。
51.该实施例中,至少在第一位置和第二位置之间的部分角度位置,扭簧组件相对芯轴2 的力矩大小与第二部件200的重力相对芯轴2的力矩大小差值在预定范围内。在一种示例中,由第一位置转动至第二位置的过程中,第二部件200的重力相对芯轴2的力矩的变化先减小后变大,请参考图5所示的变化曲线图,其中横坐标为第二部件相对水平面的转动角度,纵坐标为力矩,当第二部件200在与第一部件100之间夹角0
°
至180
°
之间转动时,第二部件200的重力相对芯轴2的力矩大致为余弦曲线。只要将扭簧8相对芯轴2产生的力矩也按余弦曲线设置,这样第二部件200的重力、扭簧8二者相对芯轴2的力矩之间的差值在第一位置和第二位置整个转动过程差值相同或者相差预定值,即f
开
l=gl1cos θ-m
组件
=c
定值
,操作人员在转动第二部件200时,施加于第二部件200上的力f
开
基本恒定,提升产品使用体验感。上述公式中g为第二部件200的重力,l1为第二部件200的质心到芯轴2轴线的距离,θ为第二部件200与水平面的夹角,m
组件
为扭簧组件对芯轴2的力矩, f
开
为操作人员开合电子产品时施加于第二部件200上的力,l为作用于第二部件200上的力f
开
与芯轴2的距离,c
定值
为常数,其可以为零,也可以为不等于零的其他数值。当c
定值
为零时,此时扭簧组件相对芯轴2的力矩m
组件
与第二部件200的重力相对所述芯轴2的力矩gl1cosθ大小相同,方向相反,此时操作人员施加于第二部件200的力f
开
接近零,即操作人员只用施加很小的力就能在第一位置和第二位置之间转动第二部件200,这样有利于操作人员单手开启或者关闭电子设备,提高电子设备开启灵活性。
52.需要说明的是,本技术以第一部件100基本与水平面平行,这样θ也可以理解为第二部件200与第一部件100之间的夹角。
53.上述实施例中所述的扭簧组件相对芯轴2的力矩变化规律与第二部件200重力相对芯轴2的力矩的变化规律相同且二者差值处于预定范围,可以在第一位置至第二位置全过程均遵循上述规律,当然也可以在第一位置至第二位置的某一区间段内遵循上述规律。
54.扭簧组件对芯轴2的力矩m
组件
可以通过以下方式实现与第二部件200重力相对芯轴2 的力矩的变化规律相同且二者差值处于预定范围。
55.请参考图5,图5为本技术一种实施例中扭簧8相对芯轴的力矩与第二部件200的重力相对芯轴力矩示意图,其中实现为第二部件的重力相对芯轴的力矩变化曲线,虚线为扭簧相对芯轴的力矩变化曲线。
56.其中,扭簧8的力矩公式为m1=kθ其中为
57.式中e为杨氏模量、d为扭簧8的中径、n为有效圈数、d为扭簧8丝直径
58.当上述e、d、n、d四个变量都是常数时,扭簧8的刚度k就是常数,因此是无法实现与第二部件200的重力产生的力矩保持同步的非线性变化。
59.当扭簧8的刚度配置成在扭转的过程中变化以使扭簧8所产生的力矩与第二部件200 的重力产生的力矩数值保持相等或者差值恒定,即该实施例中,扭簧8为刚度随转动角度变化的结构,以便扭簧8相对芯轴2的力矩与第二部件200的重力相对芯轴2的力矩二者大小之差在预定范围、方向相反。
60.当扭簧8刚度产生的力矩与第二部件200的重力产生的力矩二者差值为零时,在0-180 范围内,扭矩完全可以克服第二部件200的重力产生阻力,且使得整个开合过程中,扭簧 8的扭矩与第二部件200的重力产生扭矩矩始终保持平衡,只需较小的外力就能实现第二部件200的开合,且能在任意角度保持稳定姿态。
61.请参考图8,以d值变化实现扭簧8力矩m1按如上所述规律变化为例,在一种示例中当d按照图8所示规律设置时,这样扭簧8在转动时相对芯轴2的力矩m1的变化规律与第二部件200重力的变化规律相同,且二者的大小可以基本相等。
62.上述实施例仅给出了扭簧8的d值变化实现扭簧8在转动时相对芯轴2的力矩m1的变化规律与第二部件200重力的变化规律相同,且二者的大小可以基本相等的实施方式,本领域内技术人员应当理解,扭簧组件在转动过程中力矩的变化规律可以通过合理配置扭簧8的e、d、n、d其中一者或者几者获得,其他参数配置的具体实施方式本文不做详细描述,本领域内技术人员完全可以在本文所记载内容的基础上实现。
63.请再次参考图6和图7,该实施例中扭簧组件还可以包括固定支架6和转动支架1,其中芯轴2固定于固定支架6,芯轴2可以通过锁紧螺母5锁紧固定于固定支架6,具体地,固定支架6包括第一支撑壁61和第二支撑壁62,芯轴2支撑于第一支撑壁61和第二支撑壁62,转动支架1具有安装孔,转动支架1通过安装孔转动安装于芯轴2,扭簧8也套装于芯轴2,并且至少部分位于安装孔内部,扭簧8的第一臂、第二臂分别与固定支架 6和转动支架1固定。固定支架6具有与第一部件100配合固定的第一安装结构,转动支架1具有与第二部件200配合固定的第二安装结构。
64.图7中给出了第一安装结构和第二安装结构为孔结构的具体实施方式,如图7所示固定支架6上设置有孔6a和转动支架上1设置有孔1a。当然,固定支架6、转动支架1、第一安装结构、第二安装结构的具体形式不局限于本文所描述,可以根据所应用的电子设备合理设置。
65.下文还给出了转轴结构300的另一种具体实施方式,与上述改变扭簧8刚度不同,下文中扭簧8的刚度值恒定。
66.为了实现第二部件200相对第一部件100正常开合,对于刚度恒定的扭簧8相对芯轴 2的最大力矩变化曲线如图5所示虚线,扭簧8的力矩公式m1=kθ,为了补偿在转动过程中扭簧8力矩与第二部分的重力力矩的差值,扭簧组件还包括至少一个摩擦单元,每一个摩擦单元包括能够配合产生摩擦力的第一部分和第二部分,第一部分与芯轴2至少周向限位,即第一部分不能相对芯轴2转动,第二部件200用于与第二部件200固定并且与芯轴2转动连接。请参见图3,第二部分为转动支架1的转动管体1-1,转动支架1固定连接第二部件200。第一部分包括设置于芯轴2上的第一摩擦片4和第二摩擦片7。
67.摩擦单元的摩擦力随转动角度变化,以便由扭簧8处于自由状态的位置朝向第一位置或者第二位置转动过程中,各摩擦单元相对芯轴2的摩擦力矩与扭簧8相对芯轴2的扭转力矩之和,与第二部件200的重力相对芯轴2的力矩大小之差在预定范围、方向相反。
68.以gl1cosθ=kθ+mf为例,其中mf为摩擦力所产生的力矩,当第二部件200自90
°
位置转动至0
°
位置或者180
°
位置过程中,三者产生的力矩平衡,使用者只需要施加很小的力就能转动第二部件200,并且可以使第二部件200停留至任意位置。
69.当由第一位置(0
°
位置)或者第二位置(180
°
位置)转动至90
°
位置过程,gl1cos θ+mf=kθ+f
开
l,在该过程中扭簧8的弹性力矩能够抵消一部分重力和摩擦力的阻力力矩,因此使用者打开第二部件200的力也相对比较小。
70.请再次参考图3和图4,在一种示例中,第二摩擦片7的第一侧面与第一摩擦片4配合摩擦接触,第二侧面71与第二部分相对,并且第二部分与第二侧面71相对的表面和第二侧面71均为凸凹结构面,以配置形成随转动角度变化的摩擦力。图3所示转动支架1 包括第二部分,转动支架1的转动管体1-1为第二部分,转动管体1-1的两侧面均设置有凸凹结构面,图3中示出了一侧的凸凹结构面1b,两侧结构相同。
71.当第二部分相对第二摩擦片7转动时,因二者相对的两表面为凸凹结构,转动过程中二者之间的作用力可以是不相同的,这样第二摩擦片7和第一摩擦片4之间的接触力也随之改变,相应地第一摩擦片4和第二摩擦片7之间的摩擦力也随之改变,即通过设置第二部分和第二摩擦片7相对两表面的形状,能够获得满足gl1cosθ=kθ+mf的摩擦力。
72.第二部分与第二侧面相对的表面和第二侧面相对形状根据应用的电子设备所需而定。
73.该实施例中,转轴结构300还包括固定支架6,芯轴2安装于固定支架6,固定支架6 设置有与第一部件100固定的安装结构,摩擦单元还包括弹簧,弹簧套装于芯轴2并且压装于第一摩擦片和固定支架6之间。如图3和4所示,摩擦单元包括两个,相应地两个摩擦单元中的弹簧分别为第一弹簧11和第二弹簧3,第一弹簧11压装于第一摩擦片10和固定支架6的第一支撑壁61之间,第二弹簧3压装于第一摩擦片4和固定支架6的第二支撑壁62之间。
74.这样在弹簧的弹性回复力作用下,第一摩擦片和第二摩擦片的配合摩擦的表面可以始终相抵靠,提高机构使用的可靠性。
75.在一种示例中,转轴结构300还包括螺母5,固定支架6包括第一支撑壁61和第二支撑壁62,第一支撑壁61和第二支撑壁62具有同轴通孔,芯轴2的一端部固定与第一支撑壁61的通孔内部,另一端部穿过第二支撑壁62上的通孔与螺母5螺纹配合。即芯轴2的另一端设置有螺纹段21,螺母5配合安装于螺纹段。通过调节螺母5在螺纹段21上的轴向位置可以实现弹簧压缩量的调节,进而实现转轴结构300处于90
°
位置时第一摩擦片和第二摩擦片之间预紧摩擦力的调节。
76.转轴结构300中摩擦单元的数量可以为两个,两个摩擦单元的第二部分为同一构件,两个摩擦单元的第一部分对称位于构件的两侧。请再次参考图3,第一摩擦片10、第二摩擦片9、第一弹簧11和转动支架1能够形成一个摩擦单元,第一摩擦片4、第二摩擦片7、第二弹簧3和转动支架1也能够形成摩擦单元,并且两个第一摩擦片对称布置于转动支架两侧,两个第二摩擦片对称布置于转动支架1两侧。该实施例中转轴结构300中设置有关于转动构件对称设置的第一部分,能够实现芯轴2受力稳定与平衡。
77.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1