一种针对道路路面破损的智能图像识别设备的制作方法
1.本实用新型涉及道路施工设备技术领域,具体为一种针对道路路面破损的智能图像识别设备。
背景技术:
2.图像识别,是指利用计算机对图像进行处理、分析和理解,以识别各种不同模式的目标和对象的技术,是应用深度学习算法的一种实践应用。现阶段图像识别技术一般分为人脸识别与商品识别,人脸识别主要运用在安全检查、身份核验与移动支付中;商品识别主要运用在商品流通过程中,特别是无人货架、智能零售柜等无人零售领域,图像的传统识别流程分为四个步骤: 图像采集
→
图像预处理
→
特征提取
→
图像识别。图像识别软件国外代表的有康耐视等,国内代表的有图智能、海深科技等。另外在地理学中指将遥感图像进行分类的技术,现需要一种可以对道路路面破损的图像识别设备,现有的图像识别设备无法有效的对道路进行识别,调节识别高度时需要人员手持作业,浪费人力,且人员手持识别设备不稳定,从而导致图像识别不准确。
技术实现要素:
3.本实用新型的目的在于提供了一种针对道路路面破损的智能图像识别设备,解决了背景技术中的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种针对道路路面破损的智能图像识别设备,包括支撑台、支撑腿、连杆、移动轮,所述支撑台底端设置有升降机构,所述支撑腿内部设置有缓冲轮机构;
5.所述升降机构包括双向电机、支撑板、长转轴、第一伞齿轮、第二伞齿轮、轴承一、螺纹杆、支撑腿套,所述长转轴一端固定安装在双向电机输出端,所述长转轴另一端贯穿支撑腿,且所述支撑腿数量为两个,所述长转轴另一端通过轴承二与另一个支撑腿内部开设的槽内壁转动连接,所述第一伞齿轮固定套设在长转轴外壁上,且所述第一伞齿轮数量为两个,另一个所述第一伞齿轮固定套设在长转轴靠近另一端外壁上,所述第一伞齿轮与第二伞齿轮啮合,所述第二伞齿轮固定套设在螺纹杆一端外壁上,所述螺纹杆通过轴承一与支撑腿顶端转动连接,所述螺纹杆与支撑腿套内部开设的螺纹螺纹连接,所述支撑腿套固定安装在支撑台靠近一端底端,且所述支撑腿套的数量为两个,另一个所述支撑腿套固定安装在支撑台靠近另一端底端。
6.优选的,所述缓冲轮机构包括弹簧二、限位板、缓冲杆、固定板,所述弹簧二一端固定安装在支撑腿底端开设的杆槽顶端内壁上,所述弹簧二另一端固定安装在限位板顶端,所述限位板通过滑块与支撑腿开设的杆槽内壁开设的滑槽滑动连接,所述缓冲杆固定安装在限位板底端,所述固定板固定安装在缓冲杆底端,通过设置弹簧二,使设备在凹凸不平的道路上移动时,可以起到一个缓冲作用,使捕捉摄像头捕捉时更加稳定,识别更加准确,通过设置滑块,使限位板可在支撑腿中进行滑动,从而实现对弹簧二的一个挤压与拉伸。
7.优选的,所述支撑台内部开设的杆槽内壁固定安装有弹簧一,所述弹簧一一端固定安装有移动杆,通过设置弹簧一,通过弹簧一的弹性势能使夹板对图像识别主体在支撑台上固定,使图像识别主体在移动过程中不会产生大的晃动,从而影响图像识别精度。
8.优选的,所述移动杆与支撑台内部开设的杆槽滑动连接,所述移动杆一端固定安装有夹板,所述夹板表面设置有挤压垫,通过设置挤压垫,使夹板在与图像识别主体夹紧接触时不会产生硬性接触,从而降低夹板对图像识别主体的磨损,提高图像识别主体的使用寿命。
9.优选的,所述支撑台顶端开设的主体槽插接有图像识别主体所述图像识别主体顶端设置有显示屏,所述图像识别主体一侧设置有捕捉摄像头,通过设置捕捉摄像头,可以捕捉道路路面破损的情况,从而在显示屏上反馈出来。
10.优选的,所述双向电机固定安装在支撑板顶端,所述支撑板固定安装在支撑腿一侧外壁上,所述支撑腿套通过连杆与另一个支撑腿套固定连接,所述支撑台一侧设置有推把,所述移动轮设置在固定板底端,通过将双向电机固定安装在支撑板,使双向电机在运转时更加稳定,通过设置移动轮,方便设备的移动,通过设置推把,方便人员推动设备移动。
11.本实用新型提供了一种针对道路路面破损的智能图像识别设备。该针对道路路面破损的智能图像识别设备具备以下有益效果:
12.(1)、该针对道路路面破损的智能图像识别设备,通过双向电机、支撑板、长转轴、第一伞齿轮、第二伞齿轮、轴承一、螺纹杆、支撑腿套的共同作用下,可以实现设备高度的增高与降低,结构简单易操作,且方便对捕捉摄像头的使用,当捕捉摄像头焦距无法再调整时,这时可通过调整整体设备的高度从而间接调整捕捉摄像头焦距,使捕捉摄像头的识别的更准确,提高图像识别质量,从而提高工作效率;
13.(2)、该针对道路路面破损的智能图像识别设备,通过弹簧二、限位板、缓冲杆、固定板的共同作用下,可以保证设备的平整度,使捕捉摄像头捕捉使更加稳定,使图像识别更加准确,且保证图像识别主体在凹凸不平的路面移动时不会收到颠簸的影响,而影响设备的精度,从而保证图像识别主体的使用寿命。
附图说明
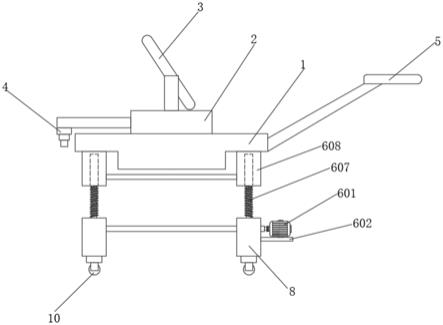
14.图1为本实用新型整体结构示意图;
15.图2为本实用新型正面剖视结构示意图;
16.图3为本实用新型图2中a部放大结构示意图;
17.图4为本实用新型图2中b部放大结构示意图。
18.图中:1.支撑台2.图像识别主体3.显示屏4.捕捉摄像头5.推把6.升降机构7.缓冲轮机构8.支撑腿9.连杆10.移动轮11.弹簧一12.移动杆13.夹板601.双向电机602.支撑板603.长转轴604.第一伞齿轮605.第二伞齿轮606.轴承一607.螺纹杆608.支撑腿套701.弹簧二702.限位板703.缓冲杆704.固定板。
具体实施方式
19.如图1-4所示,本实用新型提供一种技术方案:一种针对道路路面破损的智能图像识别设备,包括支撑台1、支撑腿8、连杆9、移动轮10,支撑台1底端设置有升降机构6,支撑
腿8内部设置有缓冲轮机构7,缓冲轮机构7 包括弹簧二701、限位板702、缓冲杆703、固定板704,弹簧二701一端固定安装在支撑腿8底端开设的杆槽顶端内壁上,弹簧二701另一端固定安装在限位板702顶端,限位板702通过滑块与支撑腿8开设的杆槽内壁开设的滑槽滑动连接,缓冲杆703固定安装在限位板702底端,固定板704固定安装在缓冲杆703底端,通过设置弹簧二701,使设备在凹凸不平的道路上移动时,可以起到一个缓冲作用,使捕捉摄像头4捕捉时更加稳定,识别更加准确,通过设置滑块,使限位板702可在支撑腿8中进行滑动,从而实现对弹簧二701的一个挤压与拉伸,通过弹簧二701、限位板702、缓冲杆703、固定板704的共同作用下,可以保证设备的平整度,使捕捉摄像头4捕捉时更加稳定,使图像识别更加准确,且保证图像识别主体2在凹凸不平的路面移动时不会收到颠簸的影响,而影响设备的精度,从而保证图像识别主体2的使用寿命;
20.升降机构6包括双向电机601、支撑板602、长转轴603、第一伞齿轮604、第二伞齿轮605、轴承一606、螺纹杆607、支撑腿套608,长转轴603一端固定安装在双向电机601输出端,双向电机601固定安装在支撑板602顶端,支撑板602固定安装在支撑腿8一侧外壁上,支撑腿套608通过连杆9与另一个支撑腿套固定连接,支撑台1一侧设置有推把5,移动轮10设置在固定板704底端,通过将双向电机601固定安装在支撑板602,使双向电机601在运转时更加稳定,通过设置移动轮10,方便设备的移动,通过设置推把5,方便人员推动设备移动,长转轴603另一端贯穿支撑腿8,且支撑腿8数量为两个,长转轴603另一端通过轴承二与另一个支撑腿内部开设的槽内壁转动连接,第一伞齿轮604固定套设在长转轴603外壁上,且第一伞齿轮数量为两个,另一个第一伞齿轮604固定套设在长转轴603靠近另一端外壁上,第一伞齿轮604与第二伞齿轮605啮合,第二伞齿轮605固定套设在螺纹杆607 一端外壁上,螺纹杆607通过轴承一606与支撑腿8顶端转动连接,螺纹杆 607与支撑腿套608内部开设的螺纹螺纹连接,支撑腿套608固定安装在支撑台1靠近一端底端,支撑台1顶端开设的主体槽插接有图像识别主体2图像识别主体2顶端设置有显示屏3,图像识别主体2一侧设置有捕捉摄像头4,通过设置捕捉摄像头4,可以捕捉道路路面破损的情况,从而在显示屏3上反馈出来,支撑台1内部开设的杆槽内壁固定安装有弹簧一11,弹簧一11一端固定安装有移动杆12,通过设置弹簧一11,通过弹簧一11的弹性势能使夹板13对图像识别主体2在支撑台1上固定,使图像识别主体2在移动过程中不会产生大的晃动,从而影响图像识别精度,移动杆12与支撑台内部开设的杆槽滑动连接,移动杆12一端固定安装有夹板13,夹板13表面设置有挤压垫,通过设置挤压垫,使夹板13在与图像识别主体2夹紧接触时不会产生硬性接触,从而降低夹板13对图像识别主体2的磨损,提高图像识别主体2的使用寿命,且支撑腿套608的数量为两个,另一个支撑腿套608固定安装在支撑台1靠近另一端底端,通过双向电机601、支撑板602、长转轴603、第一伞齿轮604、第二伞齿轮605、轴承一606、螺纹杆607、支撑腿套608的共同作用下,可以实现设备高度的增高与降低,结构简单易操作,且方便对捕捉摄像头4的使用,当捕捉摄像头4焦距无法再调整时,这时可通过调整整体设备的高度从而间接调整捕捉摄像头4焦距,使捕捉摄像头4的识别的更准确,提高图像识别质量,从而提高工作效率。
21.该针对道路路面破损的智能图像识别设备在使用时,当需要调节设备高度时,启动双向电机601,双向电机601正转带动长转轴603转动,长转轴 603带动第一伞齿轮604转动,第一伞齿轮604带动第二伞齿轮605转动,第二伞齿轮605带动螺纹杆607转动,螺纹杆607转动则带动支撑腿套608向下移动,支撑腿套608带动支撑台1向下移动,支撑台1带动图
像识别主体2 向下移动,实现设备高度下降,启动双向电机601反转时,则使支撑台1带动图像识别主体2向上移动,实现设备高度上升,通过双向电机601的转向不同可以实现设备高度的增高与降低,结构简单易操作,且方便对捕捉摄像头4的使用,当捕捉摄像头4焦距无法再调整时,这时可通过调整整体设备的高度从而间接调整捕捉摄像头4焦距,使捕捉摄像头4的识别的更准确,提高图像识别质量,从而提高工作效率,当设备在凹凸不平的路面移动时,移动轮10会对固定板704有一个向上的力,固定板704会对缓冲板703有一个向上的力,缓冲板703会对限位板702有一个向上的力,限位板702会压缩弹簧二701,使移动轮10上移,从而保证设备的平整度,使捕捉摄像头4 捕捉时更加稳定,使图像识别更加准确,且保证图像识别主体2在凹凸不平的路面移动时不会收到颠簸的影响,而影响设备的精度,从而保证图像识别主体2的使用寿命。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1