一种高精密俯仰蜗轮蜗杆结构的制作方法
1.本实用新型涉及航空航天领域技术领域,具体是一种高精密俯仰蜗轮蜗杆结构。
背景技术:
2.蜗轮蜗杆结构常用来传递两交错轴之间的运动和动力,蜗轮与蜗杆在其中间平面内相当于齿轮与齿条,蜗杆又与螺杆形状相似,高精密俯仰涡轮蜗杆结构用于控制地面卫星接收设备的俯仰角。
3.中国专利公开了一种蜗轮蜗杆改善结构(公告号cn212004112 u),该专利技术弹性填充结构的厚度大于限位槽的深度有效消除了轴承组件与壳体之间的间隙,但是随着使用时间增长,弹性填充结构中的弹性恢复能力会逐渐变弱,将会导致该结构稳定性变差。
技术实现要素:
4.本实用新型的目的在于提供一种高精密俯仰蜗轮蜗杆结构,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种高精密俯仰蜗轮蜗杆结构,包括l型底座,所述l型底座的上方连接有控制器,所述l型底座的一侧连接有连接轴,所述连接轴的外侧连接有蜗轮,所述l型底座的顶端中间位置开设有凹槽,所述凹槽的内侧对应连接有一组第二电机,所述第二电机内部输出轴的一端连接有丝杆,所述丝杆的一端连接有第二轴承座,所述第二轴承座与l型底座相连接,所述丝杆的外侧连接有滚珠螺母,所述滚珠螺母的上方连接有第三u型座,所述第三u型座的上方连接有连接杆,所述连接杆的顶端和尾端均开设有轴孔,顶端所述轴孔的内侧连接有第二u型座,所述第二u型座的内侧设置有连接在轴孔内侧的轴杆,所述第二u型座的结构与第三u型座的结构一致,所述第二u型座的上方连接有第一u型座,所述第一u型座的左侧连接有第一电机,所述第一电机内部输出轴的一端贯穿第一u型座的内部连接有蜗杆,所述蜗杆的一端连接有第一轴承座,所述第一轴承座与第一u型座相连接。
7.作为本实用新型再进一步的方案:所述第一u型座的下方连接有红外线测距传感器,所述凹槽的内侧顶端连接有信号接收器,所述凹槽的内侧顶端靠近信号接收器的位置连接有单片机,所述凹槽的内侧底端靠近第二轴承座的位置连接有折射板,所述l型底座的上方远离控制器的位置连接有显示器。
8.作为本实用新型再进一步的方案:所述l型底座的顶端靠近凹槽的位置开设有一组滑套,所述滑套的内侧连接有滑杆,所述滑杆与第一u型座相连接。
9.作为本实用新型再进一步的方案:所述连接杆的两端均通过轴孔与轴杆转动连接。
10.作为本实用新型再进一步的方案:所述显示器通过电路与单片机电性连接。
11.作为本实用新型再进一步的方案:所述第一u型座与l型底座通过滑杆和滑套滑动连接。
12.与现有技术相比,本实用新型的有益效果是:
13.1、设置第二电机、连接杆、第二u型座和第三u型座,同时开启左右两侧的第二电机,带动丝杆旋转,进而带动滚珠螺母及上方的第三u型座进行移动,在连接杆的支撑作用下,带动连接杆另一端的第二u型座进行抬升,从而实现对第三u型座上方的蜗杆和蜗轮之间的间隙调整,有利于消除蜗轮和蜗杆之间的间隙,操作稳定且高效,不存在弹性恢复能力会逐渐变弱的情况,解决了随着使用时间增长,弹性填充结构中的弹性恢复能力会逐渐变弱,将会导致该结构稳定性变差的问题。
14.2、设置红外线测距传感器和显示器,在对蜗杆进行高度调整过程中,开启红外线测距传感器,使投射出的红外线照射在折射板上,然后在反射回红外线测距传感器内部,得到电信号,然后将电信号通过信号接收器传输至单片机内部计算,计算距离结果再通过显示器反应,便于工作人员及时了解高度的变化。
15.3、设置滑杆和滑套,蜗杆在进行高度调整过程中,带动下方的滑杆沿滑套内部滑动,在滑套的作用下,起到了限位的作用下,有利于使第一u型座更加平稳的进行升降移动。
附图说明
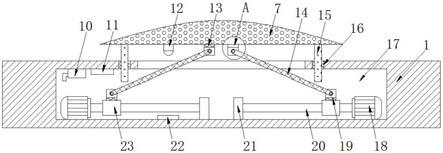
16.图1为一种高精密俯仰蜗轮蜗杆结构的结构示意图;
17.图2为一种高精密俯仰蜗轮蜗杆结构中l型底座的剖视图;
18.图3为一种高精密俯仰蜗轮蜗杆结构中a处的放大图。
19.图中:1、l型底座;2、蜗轮;3、连接轴;4、第一轴承座;5、蜗杆;6、显示器;7、第一u型座;8、第一电机;9、控制器;10、信号接收器;11、单片机;12、红外线测距传感器;13、第二u型座;14、连接杆;15、滑杆;16、滑套;17、凹槽;18、第二电机;19、第三u型座;20、丝杆;21、第二轴承座;22、折射板;23、滚珠螺母;24、轴孔;25、轴杆。
具体实施方式
20.请参阅图1~3,本实用新型实施例中,一种高精密俯仰蜗轮蜗杆结构,包括l型底座1,l型底座1的上方连接有控制器9,l型底座1的一侧连接有连接轴3,连接轴3的外侧连接有蜗轮2,l型底座1的顶端中间位置开设有凹槽17,凹槽17的内侧对应连接有一组第二电机18,第二电机18内部输出轴的一端连接有丝杆20,丝杆20的一端连接有第二轴承座21,第二轴承座21与l型底座1相连接,丝杆20的外侧连接有滚珠螺母23,滚珠螺母23的上方连接有第三u型座19,第三u型座19的上方连接有连接杆14,连接杆14的顶端和尾端均开设有轴孔24,顶端轴孔24的内侧连接有第二u型座13,第二u型座13的内侧设置有连接在轴孔24内侧的轴杆25,第二u型座13的结构与第三u型座19的结构一致,第二u型座13的上方连接有第一u型座7,第一u型座7的左侧连接有第一电机8,第一电机8内部输出轴的一端贯穿第一u型座7的内部连接有蜗杆5,蜗杆5的一端连接有第一轴承座4,第一轴承座4与第一u型座7相连接。
21.在图1和图2中:第一u型座7的下方连接有红外线测距传感器12,凹槽17的内侧顶端连接有信号接收器10,凹槽17的内侧顶端靠近信号接收器10的位置连接有单片机11,凹槽17的内侧底端靠近第二轴承座21的位置连接有折射板22,l型底座1的上方远离控制器9的位置连接有显示器6,红外线测距传感器12型号为rs232型,单片机11型号为stm32型,信
号接收器10型号为kr20te型,在对蜗杆5进行高度调整过程中,开启红外线测距传感器12,使投射出的红外线照射在折射板22上,然后在反射回红外线测距传感器12内部,得到电信号,然后将电信号通过信号接收器10传输至单片机11内部计算,计算距离结果再通过显示器6反应,便于工作人员及时了解高度的变化。
22.在图2中:l型底座1的顶端靠近凹槽17的位置开设有一组滑套16,滑套16的内侧连接有滑杆15,滑杆15与第一u型座7相连接,蜗杆5在进行高度调整过程中,带动下方的滑杆15沿滑套16内部滑动,在滑套16的作用下,起到了限位的作用下,有利于使第一u型座7更加平稳的进行升降移动。
23.在图2和图3中:连接杆14的两端均通过轴孔24与轴杆25转动连接,同时开启左右两侧的第二电机18,带动丝杆20旋转,进而带动滚珠螺母23及上方的第三u型座19进行移动,在连接杆14的支撑作用下,带动连接杆另一端的第二u型座13进行抬升,从而实现对第三u型座19上方的蜗杆5和蜗轮2之间的间隙调整,有利于消除蜗轮2和蜗杆5之间的间隙,操作稳定且高效,不存在弹性恢复能力会逐渐变弱的情况,解决了随着使用时间增长,弹性填充结构中的弹性恢复能力会逐渐变弱,将会导致该结构稳定性变差的问题。
24.在图1和图2中:显示器6通过电路与单片机11电性连接,电信号通过信号接收器10传输至单片机11内部计算,计算距离结果再通过显示器6反应,便于工作人员及时了解高度的变化。
25.在图2中:第一u型座7与l型底座1通过滑杆15和滑套16滑动连接,有利于使第一u型座7更加平稳的进行升降移动。
26.本实用新型的工作原理是:同时开启左右两侧的第二电机18,带动丝杆20旋转,进而带动滚珠螺母23及上方的第三u型座19进行移动,在连接杆14的支撑作用下,带动连接杆另一端的第二u型座13进行抬升,从而实现对第三u型座19上方的蜗杆5和蜗轮2之间的间隙调整,有利于消除蜗轮2和蜗杆5之间的间隙,在对蜗杆5进行高度调整过程中,开启红外线测距传感器12,使投射出的红外线照射在折射板22上,然后在反射回红外线测距传感器12内部,得到电信号,然后将电信号通过信号接收器10传输至单片机11内部计算,计算距离结果再通过显示器6反应,便于工作人员及时了解高度的变化,蜗杆5在进行高度调整过程中,带动下方的滑杆15沿滑套16内部滑动,在滑套16的作用下,起到了限位的作用下,有利于使第一u型座7更加平稳的进行升降移动。
27.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1