一种用于管路探测扫描的管路探测车的制作方法
1.本实用新型涉及管路探测装置的技术领域,具体的说,是一种用于管路探测扫描的管路探测车,用于对管路内部进行异物排查和缺陷检测。
背景技术:
2.飞机燃油管路是实现航空燃油运输的通道,在进行部件装配时,若不慎将异物落入管路内部,将对飞机的安全运行造成隐患。由于管路内部结构复杂、形状各异,导致要对管路内部进行异物排查时面临很大的困难,同时由于管路的内径较小,对伸入管路内部的探测装置的体积提出了严格的要求,因此亟需一款结构紧凑小巧、功能齐备且可靠性强的管路探测车,在封闭弯曲的管路顺利行进,对管路内的异物排查、内壁凹凸点缺陷记录,建立管路内壁的点云数据模型。
技术实现要素:
3.本实用新型的目的在于提供一种用于管路探测扫描的管路探测车,实现直观观察管路情况、对管路内壁的360
°
扫描测量距离值以探测异物或管内壁凹凸点状况的功能。
4.本实用新型通过下述技术方案实现:
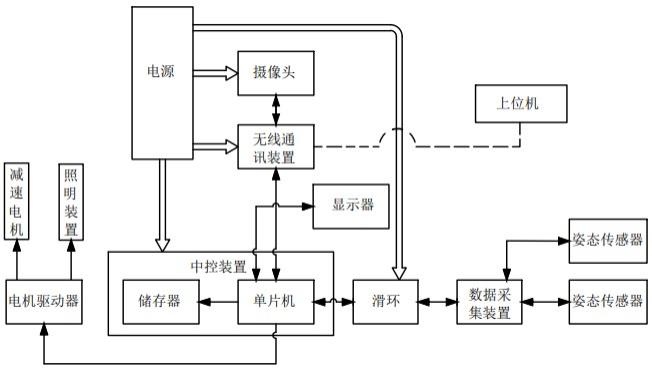
5.一种管路探测车,包括车体、安装在车体上的减速电机以及与上位机远程通讯的电控单元,所述电控单元包括电源以及分别由电源供电的摄像头、无线通讯装置、中控装置、电机驱动器、照明装置、数据采集装置、测距传感器和姿态角传感器;
6.所述摄像头通过无线通讯装置与所述上位机连接;
7.所述姿态角传感器、测距传感器分别与所述数据采集装置电连接,所述数据采集装置与所述中控装置电连接;
8.所述中控装置通过无线通讯装置与上位机远程通讯;
9.所述中控装置还与所述电机驱动器电连接,所述电机驱动器分别与所述减速电机、所述照明装置电连接。
10.为了更好地实现本实用新型,进一步地,所述车体包括设置有滑环的车体前段、车体后段;
11.所述电源、摄像头、无线通讯装置、中控装置、电机驱动器、照明装置安装在所述车体前段;所述数据采集装置、测距传感器、姿态角传感器安装在所述车体后段;
12.所述电源通过所述滑环向所述数据采集装置、所述测距传感器、所述姿态角传感器供电;
13.所述数据采集装置通过所述滑环与所述中控装置连接,传输传感器信号。
14.为了更好地实现本实用新型,进一步地,所述摄像头安装在所述车体前段的前端,对车体前方环境进行图像采集。
15.为了更好地实现本实用新型,进一步地,所述照明装置安装在所述车体前段的前端,对车体前方进行照明。
16.为了更好地实现本实用新型,进一步地,所述中控装置包括单片机、储存器和显示器;所述单片机分别与所述无线通讯装置、储存器、显示器和电机驱动装置电连接,且所述单片机通过所述滑环与所述数据采集装置电连接。
17.为了更好地实现本实用新型,进一步地,所述车体前段上设有多个导向支架,所述导向支架外端设有导向轮;所述车体后段上设有多个驱动支架,所述驱动支架外端设有驱动轮;
18.所述减速电机安装在所述车体前段,且所述减速电机的输出轴通过滑环与所述车体后段的驱动支架传动连接。
19.为了更好地实现本实用新型,进一步地,所述导向轮的转动平面与所述输出轴的轴线平行,所述驱动轮的转动平面与所述输出轴的轴线始终存在夹角α,且0
°
<α<90
°
。
20.为了更好地实现本实用新型,进一步地,所述测距传感器数量为三个,三个所述测距传感器安装在所述驱动支架上,且三个所述测距传感器在以所述输出轴的轴线为圆心的同一圆周面上以两两测量夹角为120
°
的方式均布。
21.为了更好地实现本实用新型,进一步地,所述姿态角传感器安装在所述驱动支架上,且所述姿态角传感器的安装位置不在所述输出轴的轴线上。
22.本实用新型与现有技术相比,具有以下优点及有益效果:
23.(1)本实用新型通讯装置将摄像头拍摄画面实施传递到上位机,便于直观观察管路内部情况;通过测距传感器对管路内部异物和凸起等异常结构进行检测和排查;
24.(2)所述测距传感器和姿态角传感器安装于所述车体后段,探测车行进依靠车体后段绕输出轴的轴线做旋转运动,因此在探测车行进过程中测距传感器依靠车体后段旋转运动实现对管路内壁的360
°
扫描测量距离值,再由姿态传感器到实时的姿态角度,依据坐标换算法得到内壁空间扫描点坐标值,并依据大量扫描点坐标值结合各点对应的距离值,实现对管路内壁情况的建模分析。
附图说明
25.下面将结合附图对技术方案进行清楚、完整地描述,显然所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。
26.图1为本实用新型的电子器件系统中各个电气元器件之间的连接示意图;
27.图2为本实用新型的车体的结构示意图;
28.图3为本实用新型的车体位于所述管路时的后视图;
29.图4为本实用新型的车体的仰视图;
30.图5为导向轮和驱动轮在管路内壁上轨迹示意图。
31.其中:1、摄像头;2、车体前段;21、导向支架;22、导向轮;23、滑环;25、减速电机;26、输出轴;27、壳体;28、显示器;3、车体后段;31、驱动支架;32、驱动轮。
具体实施方式
32.以下结合实施例的具体实施方式,对本发明创造的上述内容再做进一步的详细说明。但不应将此理解为本发明上述主题的范围仅限于以下的实例。在不脱离本发明上述技术思想情况下,根据本领域普通技术知识和惯用手段作出的各种替换或变更,均应包括在
本发明的范围内。
33.实施例1:
34.本实施例的一种用于管路探测扫描的管路探测车,如图1所示,包括车体和安装于车体上的电子器件系统,所述电子器件通过无线通讯信号与位于外界的上位机连接;电子器件系统包括电源及分别由电源供电的摄像头1、无线通讯装置、中控装置、电机驱动器、减速电机25、照明装置、数据采集装置、测距传感器和姿态角传感器;
35.所述摄像头1通过无线通讯装置与所述上位机连接;
36.所述姿态角传感器、测距传感器分别和所述数据采集装置电连接,所述数据采集装置通过与所述中控装置电连接,所述中控装置通过无线通讯装置与上位机连接;
37.所述中控装置与所述电机驱动器电连接,所述电机驱动器分别与所述减速电机25、所述照明装置电连接。
38.本实施例中,电源为蓄电池,直接或间接为上述的各个用电器件提供电能,所述摄像头1和照明装置位于探测车的最前端,摄像头1通过无线通讯装置将拍摄画面实时传递到上位机;所述数据采集装置为多通道的数据采集装置,能够同时接收多个测距传感器、姿态角传感器反馈的信息,并将采集到的信息发送给中控装置,中控装置通过无线通讯装置,将采集到的信息传递给上位机;其中所述无线通讯装置为wifi模块。
39.实施例2:
40.本实施例是在实施例1的基础上进一步优化的,具体的如图2所示,所述车体包括车体前段2和车体后段3;
41.具体的如图4所示,所述车体前段2上设有滑环23,所述滑环23外圈固定安装于所述车体前段2;所述减速电机25固定安装于车体前段2;所述减速电机25的输出轴26通过所述滑环23的内圈与所述车体后段3传动连接;
42.所述车体前段2上设有多个导向支架21,所述导向支架21外端设有导向轮22;
43.所述车体后段3上设有多个驱动支架31,所述驱动支架31外端设有驱动轮32;
44.所述导向轮22的转动平面与所述输出轴26的轴线平行,所述驱动轮32的转动平面与所述输出轴26的轴线始终存在夹角α,且0
°
<α<90
°
。
45.车体前段2设有导向支架21,支架外端的导向轮22与管路内壁接触且转动平面与所述输出轴26的轴线平行,保障车体前段2平稳运行,不会相对管路内壁发生相对转动;通过减速电机25驱动车体后段3相对所述车体前段2转动,具体的如图3-图5,车体后段3转动过程中与输出轴26的轴线呈夹角呈α(且0
°
<α<90
°
)的所述驱动轮32与管路内壁接触,在斜向摩擦力作用下,驱动轮32在管路内壁上螺旋前行,推动探测车整体行进,并可通过改变减速电机25的旋转方向控制探测车的行进方向,在减速电机25转速恒定的情况下,改变夹角α可以调节探测车的行进速度和沿探测车行进方向推动力。在导向轮22和驱动轮32对管路内壁施加一定压力的时候,可以攀爬垂直管路。
46.进一步地,如图2、图5所示,所述电源、摄像头1、无线通讯装置、中控装置、电机驱动器、照明装置固定安装于所述车体前段2上,所述摄像头1和所述照明装置位于所述车体前段2的前端;
47.所述电源通过所述滑环23向安装于所述车体后段3上的所述数据采集装置、测距传感器、姿态角传感器供电;
48.所述数据采集装置通过滑环23与所述中控装置电连接。
49.所述测距传感器和姿态角传感器安装于所述车体后段3,探测车行进依靠车体后段3绕输出轴26的轴线做旋转运动,因此在探测车行进过程中测距传感器依靠车体后段3旋转运动实现对管路内壁的360
°
扫描测量距离值,再由姿态传感器到实时的姿态角度,依据坐标换算法得到内壁空间扫描点坐标值,并依据大量扫描点坐标值结合各点对应的距离值,如导入catia软件实现对点云的显示、处理和管路内壁情况的建模分析。其中上述的坐标数据换算法为:
50.t1时刻扫描点l和θ,即得:
51.x=(l+a)
·
sinθ;
52.y=(l+a)
·
cosθ
53.其中,a为激光测距模块距离旋转中心轴的距离。
54.点的z坐标值为:
55.假设初始时t0时刻扫描点姿态角为θ1,z坐标值为0,则:
56.z=(θ-θ1)
·
k,其中,k为导程,k=d
·
π
·
tanα。
57.上式中的α为机器人驱动轮与管路轴线的夹角,d为管路的内径。
58.同时,采集到的数据为角度和距离值,无法体现出管路的弯曲形状,因此计算得到的空间点呈单方向分布。但障碍物在直线中的位置与实际弯曲管路中的位置相对应,即d≈s,由此即可根据点云数据判断出障碍物的大致位置。
59.滑环23在实现车体前段2和车体后段3转动连接的同时,还起到导通供电线路、传递电信号的做作用,避免线路缠绕,是将探测车连接为一个整体的关键部件。
60.进一步地,如图1所示,包括显示器28和所述中控装置,所述中控装置包括单片机、储存器,所述数据采集装置通过所述滑环23与所述单片机电连接,所述单片机分别与所述无线通讯装置、储存器、显示器28和电机驱动装置电连接。
61.本实施例中使用arduino单片机、sd卡储存器,其中储存器兼具保存点云扫描数据的作用。
62.进一步地,如图2和图5所示,还包括壳体27,所述壳体27罩设于所述车体前段2上,所述显示器28嵌入安装于所述壳体27外表面上。
63.进一步地,所述测距传感器数量为三个,三个所述测距传感器沿与输出轴26同轴的圆周均布。
64.进一步地,本实施例中,所述测距传感器为激光测距传感器;所述姿态角传感器为mpu陀螺仪。
65.进一步地,三个所述导向轮22沿与所述输出轴26的轴线同轴的圆周均布。
66.进一步地,所述驱动支架31为三个,每个驱动支架31的最外端设有转动连接有一个驱动轮32,三个所述驱动轮32沿与所述输出轴26的轴线同轴的圆周均布。
67.本实施例的其他部分与上述实施例1相同,故不再赘述。
68.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型做任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所做的任何简单修改、等同变化,均落入本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1