一种机器人探测装置及管道机器人的制作方法
一种机器人探测装置及管道机器人
【技术领域】
1.本实用新型涉及管道机器人技术领域,特别涉及一种机器人探测装置及管道机器人。
背景技术:
2.管道做为气体、液体等物质的输送载体,在日常生活和工业生产中无处不在。管道在使用的过程中会存在腐蚀、堵塞、裂缝等故障,同时管道在制造完成后也可能会存在异物、裂缝等缺陷,因此对管道的内部进行探测是必不可少的一个环节。在对管道的内部进行探测时,需要使用到探测装置,然而现有的探测装置在使用时无法适应管径变化,这给实际的使用带来了诸多的限制,同时摄像头没有采取任何保护措施,在使用的过程中容易损坏。有鉴于此,本案发明人针对现有技术中的上述缺陷深入研究,遂有本案产生。
技术实现要素:
3.本实用新型要解决的技术问题,在于提供一种机器人探测装置及管道机器人,解决现有探测装置无法适应管径变化,并且容易损坏的问题。
4.本实用新型是这样实现的:
5.第一方面,一种机器人探测装置,包括探测节前支架、探测节后支架以及拍摄相机;所述探测节前支架和探测节后支架固定连接在一起;所述探测节前支架和探测节后支架的外表面均围绕设置有若干个与管道的内壁相接触的第一弹性支撑轮机构;所述探测节前支架内设置有相机安装腔室,所述拍摄相机固设于相机安装腔室内,所述探测节前支架的前端固设有透明保护镜片。
6.优选地,还包括供电模块和通信模块;所述供电模块和通信模块均固设于所述探测节后支架上;所述拍摄相机与通信模块电性连接,所述通信模块和拍摄相机均与供电模块电性连接。
7.优选地,还包括设置在所述探测节后支架的外部的外壳体,所述第一弹性支撑轮机构伸出至外壳体之外;所述外壳体包括探测节下壳以及与探测节下壳相连接的探测节上壳。
8.优选地,所述透明保护镜片通过镜片压片压紧固定在探测节前支架的前端。
9.优选地,所述第一弹性支撑轮机构包括第一安装底座、第一支撑架、第一弹簧以及第一支撑轮;
10.所述第一安装底座上形成有第一支撑架装配槽,所述第一支撑架可上下活动地设置在第一支撑架装配槽内;所述第一弹簧设置在第一支撑架的下部与第一支撑架装配槽的内底部之间;所述第一支撑轮转动设置在第一支撑架的上端。
11.优选地,所述拍摄相机为红外拍摄相机。
12.优选地,所述通信模块为无线通信模块。
13.第二方面,一种管道机器人,包括上述的探测装置以及至少一个驱动节;所述驱动
节通过活动接头与探测装置相连接。
14.优选地,所述驱动节包括驱动节外壳体、固定安装于驱动节外壳体内的驱动节支架、围绕设置在驱动节支架的两端的若干个与管道的内壁相接触的第二弹性支撑轮机构以及设置在驱动节支架的中部用于驱使驱动节沿着管道的内壁前进或者后退的一对摆动式驱动轮机构;
15.所述第二弹性支撑轮机构包括第二安装底座、第二支撑架、第二弹簧以及第二支撑轮;所述第二安装底座上形成有第二支撑架装配槽,所述第二支撑架可上下活动地设置在第二支撑架装配槽内;所述第二弹簧设置在第二支撑架的下部与第二支撑架装配槽的内底部之间;所述第二支撑轮转动设置在第二支撑架的上端,且所述第二支撑轮伸出至驱动节外壳体之外;
16.所述摆动式驱动轮机构包括摆臂、第三弹簧、摆动连杆和驱动部件,所述驱动节支架内径向设置有弹簧装配腔室,所述第三弹簧安装在弹簧装配腔室内,且第三弹簧的两端配设有弹簧压片;所述摆臂的一端转动设置有驱动轮,摆臂的另一端与驱动节支架铰接,所述驱动部件固定在摆臂上,并且驱动部件与驱动轮相连接;所述摆动连杆的一端与摆臂的中部铰接,摆动连杆的另一端与弹簧压片铰接。
17.优选地,所述活动接头包括万向节本体以及套设于所述万向节本体的第四弹簧。
18.通过采用本实用新型的技术方案,至少具有如下有益效果:
19.1、在探测节前支架和探测节后支架的外表面围绕设置多个第一弹性支撑轮机构,使得在使用时可以利用第一弹性支撑轮机构实现弹性支撑,使探测装置能够自适应管径变化和实现越障功能。同时将整个拍摄相机固定在探测节前支架的内部,并在探测节前支架的前端固定设置透明保护镜片,使得在使用时可以对拍摄相机起到很好的保护作用,确保拍摄相机在使用的过程中不容易损坏,可以提升拍摄相机的使用寿命。
20.2、通过在驱动节上设置可自适应管径变化和实现越障功能的第二弹性支撑轮机构和摆动式驱动轮机构,同时探测装置上也设置有可自适应管径变化和实现越障功能的第一弹性支撑轮机构,并且驱动节与探测装置之间、驱动节与驱动节之间均采用活动接头相连接,使得整个机器人不仅能够很好的适应70-80mm管径的管道,使用范围更加广泛,而且也能够通过管道的各种弯头,包括90
°
长弯头,可以为实际的使用带来极大的方便。
【附图说明】
21.下面参照附图结合实施例对本实用新型作进一步的说明。
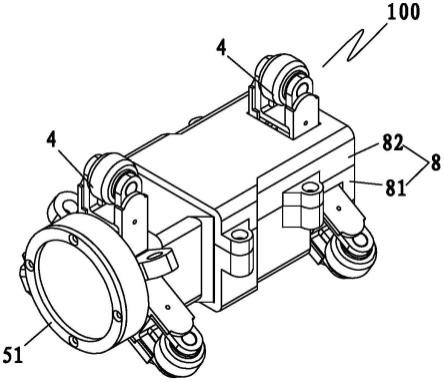
22.图1是本实用新型探测装置的立体图;
23.图2是本实用新型探测装置的俯视图;
24.图3是本实用新型探测装置的左视图;
25.图4是本实用新型探测装置的剖视图;
26.图5是本实用新型机器人的结构示意图;
27.图6是本实用新型中驱动节的剖视图;
28.图7是本实用新型中驱动节的正视图。
29.附图标记说明:
30.100-探测装置;
31.200-机器人;
32.1-探测节前支架,11-相机安装腔室;
33.2-探测节后支架;
34.3-拍摄相机;
35.4-第一弹性支撑轮机构,41-第一安装底座,411-第一支撑架装配槽,42-第一支撑架,43-第一弹簧,44-第一支撑轮;
36.5-透明保护镜片,51-镜片压片,511-开口;
37.6-供电模块;
38.7-通信模块;
39.8-外壳体,81-探测节下壳,82-探测节上壳;
40.9-驱动节,91-驱动节外壳体,92-驱动节支架,921-弹簧装配腔室,93-第二弹性支撑轮机构,931-第二安装底座,9311-第二支撑架装配槽,932-第二支撑架,933-第二弹簧,934-第二支撑轮,94-摆动式驱动轮机构,941-摆臂,942-第三弹簧,943-摆动连杆,944-驱动部件,945-弹簧压片,946-驱动轮;
41.10-活动接头,101-万向节本体,102-第四弹簧。
【具体实施方式】
42.为了更好地理解本实用新型的技术方案,下面将结合说明书附图以及具体的实施方式对本实用新型的技术方案进行详细的说明。
43.在此需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述这些实施方式和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。
44.实施例1
45.请参阅图1至图4所示,本实用新型一种机器人探测装置100的较佳实施例,探测装置100包括探测节前支架1、探测节后支架2以及拍摄相机3;所述探测节前支架1和探测节后支架2固定连接在一起,从而形成整个探测装置100的支撑结构;所述探测节前支架1和探测节后支架2的外表面均围绕设置有若干个与管道的内壁相接触的第一弹性支撑轮机构4,第一弹性支撑轮机构4能够对整个探测装置100起到弹性支撑的作用,从而使得探测装置100能够适应管径变化;所述探测节前支架1内设置有相机安装腔室11,所述拍摄相机3固设于相机安装腔室11内,所述探测节前支架1的前端固设有透明保护镜片5,以对拍摄相机3起到保护的作用。
46.本实用新型通过在探测节前支架1和探测节后支架2的外表面围绕设置多个第一弹性支撑轮机构4,使得在使用时可以利用第一弹性支撑轮机构4实现弹性支撑,使探测装置100能够自适应管径变化和实现越障功能。同时将整个拍摄相机3固定在探测节前支架1的内部,并在探测节前支架1的前端固定设置透明保护镜片5,使得在使用时可以对拍摄相
机3起到很好的保护作用,确保拍摄相机3在使用的过程中不容易损坏,可以提升拍摄相机3的使用寿命。
47.在本实用新型的实施例中,探测装置100还包括供电模块6和通信模块7;所述供电模块6和通信模块7均固设于所述探测节后支架2上;所述拍摄相机3与通信模块7电性连接,以通过通信模块7将拍摄相机3拍摄的图像进行上传;所述通信模块7和拍摄相机3均与供电模块6电性连接,以通过供电模块6对通信模块7和拍摄相机3提供直流工作电源。
48.在本实用新型的实施例中,探测装置100还包括设置在所述探测节后支架2的外部的外壳体8,以通过外壳体8对供电模块6和通信模块7起到保护的作用;所述第一弹性支撑轮机构4伸出至外壳体8之外,使得在进入到管道内后,第一弹性支撑轮机构4可以抵顶于管道的内壁实现支撑。所述外壳体8包括探测节下壳81以及与探测节下壳81相连接的探测节上壳82,通过设计外壳体8包括探测节下壳81和探测节上壳82,使得在使用时可方便将供电模块6和通信模块7安装到外壳体8的内部。在本实用新型的一些实施例中,所述探测节下壳81与探测节上壳82之间为可拆卸连接,例如可以通过螺丝将探测节下壳81与探测节上壳82锁付连接在一起,这样在需要时可将探测节上壳82拆开,从而方便对供电模块6和通信模块7进行维护操作。
49.在本实用新型的实施例中,所述透明保护镜片5通过镜片压片51压紧固定在探测节前支架1的前端,实现透明保护镜片5的固定;所述镜片压片51可通过螺丝与探测节前支架1的前端锁付连接在一起。所述镜片压片51在对应于透明保护镜片5的位置形成开口511,保证不会阻挡到拍摄相机3的视线。
50.在本实用新型的实施例中,所述第一弹性支撑轮机构4包括第一安装底座41、第一支撑架42、第一弹簧43以及第一支撑轮44;
51.所述第一安装底座41上形成有第一支撑架装配槽411,所述第一支撑架42可上下活动地设置在第一支撑架装配槽411内;所述第一弹簧43设置在第一支撑架42的下部与第一支撑架装配槽411的内底部之间,保证第一支撑架42在第一弹簧43的弹力作用下能够进行上下浮动调节;所述第一支撑轮44转动设置在第一支撑架42的上端。本实用新型的第一弹性支撑轮机构4在工作时,在第一支撑轮44沿着管道的内壁行走的过程中,当遇到障碍或者管径变小的情况时,第一支撑轮44能够压缩第一弹簧43并向内收缩;而当越过障碍或者管径变大时,第一支撑轮44在第一弹簧43的弹力作用下能够向外张开,从而保证第一支撑轮44始终与管道的内壁保持接触,实现自适应性管径变化和越障功能。
52.在本实用新型的一些实施例中,所述第一支撑架装配槽411可以呈u字型结构;所述第一支撑架42可以呈y字型结构;同时在第一支撑架装配槽411的上部设置有用于对第一支撑架42进行限位的第一限位结构(未图示),保证第一支撑架42不会与第一支撑架装配槽411脱离;其中,第一限位结构可以包括固定在第一支撑架装配槽411上的第一限位柱和沿着竖直方向开设在第一支撑架42上的第一限位槽,第一限位柱伸入至第一限位槽内,这样就可以利用第一限位柱和第一限位槽配合实现限位功能。
53.在本实用新型的一些实施例中,为了达到更好的支撑效果,所述探测节前支架1和探测节后支架2的外表面均围绕设置有3个所述第一弹性支撑轮机构4,并且3个所述第一弹性支撑轮机构4为均匀分布设置,这样在探测节前支架1和探测节后支架2的外表面上都可以形成三角支撑结构,能够实现更加稳定的支撑效果。
54.在本实用新型的实施例中,为了满足管道内部环境的拍摄需求,所述拍摄相机3为红外拍摄相机。
55.在本实用新型的实施例中,所述通信模块7为无线通信模块,在具体实施时,可以采用wifi、蓝牙等无线通信模块来实现传输功能;wifi、蓝牙等均为现有技术中十分成熟的无线通信技术,如skb360蓝牙4.0模块、esp8266 wifi模块等。
56.实施例2
57.请参阅图1至图7所示,本实用新型一种管道机器人200,机器人200包括探测装置100以及至少一个驱动节9;所述驱动节9通过活动接头10与探测装置100相连接。其中,所述探测装置100的具体结构请参照实施例1的详细介绍,在此就不再赘述了。本实用新型通过设计机器人200包括上述的探测装置100和驱动节9,并且驱动节9与探测装置100之间通过活动接头10相连接,使得整个机器人200能够通过管道内的弯头。
58.在本实用新型的一些实施例中,为了保证机器人200具有足够的驱动力,所述探测装置100配设有两个驱动节9,且两个驱动节9之间通过活动接头10相连接;当然,所述驱动节9的数量可以根据实际使用需求进行增加或者减少。
59.在本实用新型的实施例中,所述驱动节9包括驱动节外壳体91、固定安装于驱动节外壳体91内的驱动节支架92、围绕设置在驱动节支架92的两端的若干个与管道的内壁相接触的第二弹性支撑轮机构93以及设置在驱动节支架92的中部用于驱使驱动节9沿着管道的内壁前进或者后退的一对摆动式驱动轮机构94。
60.所述第二弹性支撑轮机构93包括第二安装底座931、第二支撑架932、第二弹簧933以及第二支撑轮934;所述第二安装底座931上形成有第二支撑架装配槽9311,所述第二支撑架932可上下活动地设置在第二支撑架装配槽9311内;所述第二弹簧933设置在第二支撑架932的下部与第二支撑架装配槽9311的内底部之间,保证第二支撑架932在第二弹簧933的弹力作用下能够进行上下浮动调节;所述第二支撑轮934转动设置在第二支撑架932的上端,且所述第二支撑轮934伸出至驱动节外壳体91之外;本实用新型的第二弹性支撑轮机构93在工作时,在第二支撑轮934沿着管道的内壁行走的过程中,当遇到障碍或者管径变小的情况时,第二支撑轮934能够压缩第二弹簧933并向内收缩;而当越过障碍或者管径变大时,第二支撑轮934在第二弹簧933的弹力作用下能够向外张开,从而保证第二支撑轮934始终与管道的内壁保持接触,实现自适应管径变化和越障功能。
61.在本实用新型的一些实施例中,所述第二支撑架装配槽9311可以呈u字型结构;所述第二支撑架932可以呈y字型结构;同时在第二支撑架装配槽9311的上部设置有用于对第二支撑架932进行限位的第二限位结构(未图示),保证第二支撑架932不会与第二支撑架装配槽9311脱离;其中,第二限位结构可以包括固定在第二支撑架装配槽9311上的第二限位柱和沿着竖直方向开设在第二支撑架932上的第二限位槽,第二限位柱伸入至第二限位槽内,这样就可以利用第二限位柱和第二限位槽配合实现限位功能。
62.在本实用新型的一些实施例中,为了达到更好的支撑效果,所述驱动节支架92的两端均围绕侧壁设置有3个所述第二弹性支撑轮机构93,并且3个所述第二弹性支撑轮机构93为均匀分布设置,这样在驱动节支架92的两端都可以形成三角支撑结构,能够实现更加稳定的支撑效果。
63.所述摆动式驱动轮机构94包括摆臂941、第三弹簧942、摆动连杆943和驱动部件
944,所述驱动节支架92内径向设置有弹簧装配腔室921,所述第三弹簧942安装在弹簧装配腔室921内,且第三弹簧942的两端配设有弹簧压片945,所述弹簧压片945的下部限位于弹簧装配腔室921内,弹簧压片945的上部延伸至弹簧装配腔室921的外部;所述摆臂941的一端转动设置有驱动轮946,摆臂941的另一端与驱动节支架92铰接,所述驱动部件944固定在摆臂941上,并且驱动部件944与驱动轮946相连接,以通过驱动部件944与带动驱动轮946进行旋转实现行走功能,所述驱动部件944可以采用电机;所述摆动连杆943的一端与摆臂941的中部铰接,摆动连杆943的另一端与弹簧压片945铰接。所述摆动式驱动轮机构94在工作时,这样当驱动轮946遇到障碍或者管径变小而向下摆时,摆臂941的中部可以带动摆动连杆943向下压缩第三弹簧942;而当驱动轮946越过障碍或者管径变大时,驱动轮946在第三弹簧942的弹力作用下可以向上摆,从而保证驱动轮946始终与管道的内壁保持接触,实现自适应管径变化和越障功能。
64.在本实用新型的一些实施例中,两个所述摆动式驱动轮机构94为上下对称设置,并且位于上方的所述摆动式驱动轮机构94的摆动连杆943与顶部的弹簧压片945铰接,位于下方的所述摆动式驱动轮机构94的摆动连杆943与底部的弹簧压片945铰接,使得只需使用一个第三弹簧942就可以满足两个摆动式驱动轮机构94的使用需求,即两个摆动式驱动轮机构94共用一个第三弹簧942。
65.本实用新型通过在驱动节9上设置可自适应管径变化和实现越障功能的第二弹性支撑轮机构93和摆动式驱动轮机构94,同时探测装置100上也设置有可自适应管径变化和实现越障功能的第一弹性支撑轮机构4,并且驱动节9与探测装置100之间、驱动节9与驱动节9之间均采用活动接头10相连接,使得整个机器人200不仅能够很好的适应70-80mm管径的管道,使用范围更加广泛,而且也能够通过管道的各种弯头,包括90
°
长弯头,可以为实际的使用带来极大的方便。
66.在本实用新型的实施例中,所述活动接头10包括万向节本体101以及套设于所述万向节本体101的第四弹簧102,通过设计活动接头10包括万向节本体101和第四弹簧102,不仅能够保证拉力和推力的有效传递,而且可以保证机器人200在管道内的转向能力。
67.本实用新型的机器人200在工作时,通过人工手动将机器人200放入至管道内,并控制驱动节9输出动力带动整个机器人200沿着管道的内壁前进或者后退;机器人200在沿着管道的内壁前进或者后退的过程中,拍摄相机3拍摄管道内部的图片并通过通信模块7传输给上位机;在探测工作结束后,控制驱动节9输出动力带动整个机器人200退出管道。
68.虽然以上描述了本实用新型的具体实施方式,但是熟悉本技术领域的技术人员应当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本实用新型的范围的限定,熟悉本领域的技术人员在依照本实用新型的精神所作的等效的修饰以及变化,都应当涵盖在本实用新型的权利要求所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1