减速装置及自行车的制作方法
1.本发明涉及一种减速装置及自行车。
背景技术:
2.以往的驱动模块具有第一驱动轴(例如日本公开公报特表2018-507140)。第一驱动轴设置为用于驱动模块的输入式的驱动。此外,还设置有第二驱动轴。第二驱动轴以无法旋转的方式与电气式的辅助驱动装置的转子结合。电气式的辅助驱动装置还具有定子。
3.如此,转子也可以经由第二驱动轴与波动齿轮装置结合。波动齿轮装置具有内侧衬套、波发生器及外侧衬套。
4.然而,在以往的驱动模块中,波动齿轮装置和电气式的辅助驱动装置在轴向上分离配置。因此,驱动模块(减速装置)的轴向的长度变大。
技术实现要素:
5.本发明鉴于上述技术问题而作,其目的在于提供一种能使轴向的长度较小的减速装置。
6.本发明的示例性减速装置包括马达及减速器。减速器对所述马达的旋转速度进行减速。所述马达具有马达主体、以中心轴线为中心旋转的转轴、第一轴承及第二轴承。所述减速器具有波动发生器、挠性构件及环状的环状构件。波动发生器根据周向的位置而具有不同的外径,且以所述中心轴线为中心旋转。挠性构件具有供所述波动发生器从径向内侧接触的挠性的筒状部。所述筒状部从径向内侧接触环状构件。所述挠性构件根据所述波动发生器的旋转而相对于所述环状构件相对旋转。所述马达主体具有与所述转轴连接的转子。所述波动发生器在与连接有所述转子的位置不同的位置处与所述转轴连接。所述第一轴承相对于所述转子配置于所述波动发生器的相反侧,且将所述转轴支承为能旋转。所述第二轴承配置于所述筒状部的径向内侧,且将所述转轴支承为能旋转。
7.本发明的例示性自行车具有上述减速装置、踏板、曲柄轴及链轮。曲柄轴沿轴向贯穿所述减速装置的所述转轴,并由来自所述踏板的踏力驱动。链轮连接有所述减速装置的输出轴。
8.根据例示性的本发明,能够提供能使轴向的长度较小的减速装置及自行车。有以下的本发明优选实施方式的详细说明,参照附图,可以更清楚地理解本发明的上述及其他特征、要素、步骤、特点和优点。
附图说明
9.图1是示出本发明实施方式1的减速装置的纵剖图。图2是示出实施方式1的马达的横剖图。图3是示出实施方式1的减速器的横剖图。图4是示出实施方式1的马达的转轴的立体图。
图5是将实施方式1的减速装置的一部分放大示出的纵剖图。图6a是将实施方式1的减速装置的密封部放大示出的纵剖图。图6b是将实施方式1的减速装置的密封部的另一示例放大示出的纵剖图。图6c是将实施方式1的减速装置的密封部的又一示例放大示出的纵剖图。图6d是将实施方式1的减速装置的密封部的又一示例放大示出的纵剖图。图7是示出实施方式1的减速装置的非正圆凸轮的俯视图。图8是示出本发明实施方式2的自行车的图。图9是示出装设于实施方式2的自行车的减速装置的纵剖图。
具体实施方式
10.以下参照附图,对本发明的示例性实施方式进行说明。另外,对图中相同或相当的部分标注相同的符号,不再重复说明。而且,图中,为了便于理解,适当记载三维直角坐标系的x轴、y轴和z轴。
11.在本说明书中,将与减速装置的中心轴线ax平行的方向记载为“轴向ad”,将与中心轴线ax正交的方向记载为“径向rd”,将沿着以中心轴线ax为中心的圆弧的方向记载为“周向cd”。另外,“平行的方向”包括大致平行的方向,“正交的方向”包括大致正交的方向。而且,“俯视”表示从轴向ad观察对象物。
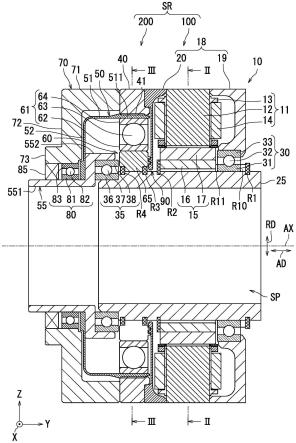
12.(实施方式1)参照图1~图7,对本发明实施方式1的减速装置sr进行说明。图1是示出实施方式1的减速装置sr的纵剖图。图2是示出减速装置sr的马达100的横剖图。图2相当于沿着图1的
ⅱ‑ⅱ
线的截面。图3是示出减速装置sr的减速器200的横剖图。图3相当于沿着图1的
ⅲ‑ⅲ
线的截面。
13.图1示出的减速装置sr对旋转速度进行减速。旋转速度例如表示每单位时间的转速。具体而言,减速装置sr将第一转速的旋转运动转换为比第一转速低的第二转速的旋转运动。
14.如图1所示,减速装置sr具有马达100和减速器200。马达100驱动减速器200。减速器200对马达100的旋转速度进行减速。具体而言,减速器200将因马达100而产生的第一转速的旋转运动转换为比第一转速低的第二转速的旋转运动。
15.马达100具有马达主体10、转轴25、第一轴承30及第二轴承35。在本实施方式中,马达100具有马达主体10、以中心轴线ax为中心旋转的转轴25、大致圆环状的第一轴承30以及大致圆环状的第二轴承35。中心轴线ax是沿着转轴25的长度方向穿过转轴25的中心的假想线。马达主体10使转轴25旋转。如图1和图2所示,马达主体10具有转子15。
16.如图1和图3所示,减速器200具有刚性内齿齿轮40、挠性外齿齿轮50及波动发生器60。
17.挠性外齿齿轮50相当于“挠性构件”的一例。刚性内齿齿轮40相当于“环状构件”的一例。
18.波动发生器60根据周向cd的位置而具有不同的外径。波动发生器60以中心轴线ax为中心旋转。图3的示例中,波动发生器60呈大致椭圆状。波动发生器60是使挠性外齿齿轮50挠曲变形的机构。挠性外齿齿轮50具有筒状部51。筒状部51具有挠性。波动发生器60从径
向内侧与筒状部51接触。即,挠性外齿齿轮50具有供波动发生器60从径向内侧接触的挠性的筒状部51。筒状部51呈大致筒状。刚性内齿齿轮40呈大致环状。图3的示例中,刚性内齿齿轮40呈大致圆环状。挠性外齿齿轮50的筒状部51从径向rd内侧与刚性内齿齿轮40接触。即,刚性内齿齿轮40呈供筒状部51从径向内侧接触的环状。挠性外齿齿轮50根据波动发生器60的旋转而相对于刚性内齿齿轮40相对旋转。
19.如图1所示,在马达100中,马达主体10的转子15与转轴25连接。具体而言,转子15固定于转轴25。另一方面,在减速器200中,波动发生器60在与连接有转子15的位置不同的位置处与转轴25连接。具体而言,波动发生器60固定于转轴25。马达100的第一轴承30将转轴25支承为能旋转。第一轴承30隔着转子15配置于波动发生器60的相反侧。即,第一轴承30相对于转子15配置于波动发生器60的相反侧。马达100的第二轴承35将转轴25支承为能旋转。第二轴承35配置于挠性外齿齿轮50的筒状部51的径向rd内侧。即,马达100的第二轴承35配置于减速器200的内部。因此,根据实施方式1,与将马达100的第二轴承35配置于减速器200的外部的情况相比,能减小减速装置sr的轴向ad的长度。即,能使减速装置sr的轴向ad的长度较小。
20.具体而言,在实施方式1中,马达100的第二轴承35隔着波动发生器60配置于转子15的相反侧。即,第二轴承35相对于波动发生器60配置于转子15的相反侧。因此,根据实施方式1,能将马达主体10配置为在轴向ad上进一步靠近减速器200。其结果是,能进一步减小减速装置sr的轴向ad的长度。
21.而且,在实施方式1中,优选马达100的转轴25是中空的。根据此优选示例,能在转轴25的内部配置轴等机械零件。其结果是,减速装置sr的应用范围扩大。具体而言,转轴25具有大致圆柱状的内部空间sp。另外,转轴25也可以不是中空的。
22.接着,参照图1和图2,对马达100的详细情况进行说明。如图1所示,马达100还具有固定构件r1、间隔件r10、间隔件r11及固定构件r2。马达主体10还具有定子11及凸缘部18。
23.定子11是马达100的定子。定子11以中心轴线ax为中心地配置。具体而言,定子11具有定子芯部12、绝缘体13及多个线圈14。
24.定子芯部12以中心轴线ax为中心地配置。定子芯部12包围中心轴线ax地配置,呈大致圆环状。定子芯部12例如由将薄板电磁钢板沿轴向ad层叠的层叠钢板构成。绝缘体13使定子芯部12和线圈14电绝缘。绝缘体13由绝缘材料构成。绝缘体13覆盖定子芯部12的至少一部分。绝缘体13包围中心轴线ax并配置成大致圆环状。绝缘体13可以由多个不同构件构成,也可以由单一的构件构成。通过隔着绝缘体13将导线卷绕于定子芯部12来构成线圈14。
25.如图2所示,定子芯部12具有大致圆环状的芯背121及多个极齿122。多个极齿122从芯背121朝径向rd内侧突出。并且,通过将导线卷绕于极齿122来构成线圈14。多个线圈14沿着周向cd配置。作为一例,定子芯部12具有18个槽。因此,在图2的示例中,定子11具有18个线圈14。
26.回到图1,转子15是马达100的转子。即,转子15以中心轴线ax为中心旋转。转子15与转轴25连接。因此,当转子15旋转时,转轴25旋转。即,转轴25与转子15一起旋转。转子15以中心轴线ax为中心地配置。转子15配置于定子11的径向rd内侧。即,马达100是内转子型的马达。另外,马达100也可以是外转子型马达。
27.具体而言,转子15具有转子芯部16和磁体17。磁体17例如是永磁体。例如,转子15可以具有沿周向cd排列的多个磁体17,也可以具有大致圆环状的单个磁体17。转子芯部16例如由将电磁钢板沿轴向ad层叠的层叠钢板构成。磁体17固定于转子芯部16的径向rd外表面。即,马达100是spm(surface permanent magnet:表面式永磁体)马达。另外,磁体17也可以固定于转子芯部16的内部。即,马达100也可以是所谓的ipm(interior permanent magnet:内部永磁体)马达。磁体17和定子芯部12在径向rd上隔开间隔相对。
28.转子15由大致圆环状的固定构件r2和大致圆环状的间隔件r11夹入,在轴向ad上被定位。
29.如图2所示,转子15具有n个磁体17。因此,马达100的极数为“n”。n是2以上的整数。图2的示例中,n=20。转子15具有第一连接部161。具体而言,转子芯部16以中心轴线ax为中心地配置。而且,转子芯部16包围中心轴线ax地配置,呈大致圆环状。并且,转子芯部16具有第一连接部161。第一连接部161与转轴25连接。具体而言,第一连接部161具有在周向cd上相连的n个第一凹部162。n个第一凹部162分别朝径向rd外侧凹陷并沿轴向ad延伸。
30.n个第一凹部162分别在径向rd上与n个磁体17相对。以使n个磁体17的磁场最优化的方式设置n个第一凹部162的形状。“最优化的磁场”是指能使转子15相对于定子11最顺畅地旋转的磁场。n个第一凹部162设置于转子芯部16的内周面。
31.另一方面,转轴25具有n个凸部250。n个凸部250朝径向rd外侧突出。n个凸部250沿周向cd相连。n个凸部250设置于转轴25的外周面。n个凸部250分别与n个第一凹部162嵌合。其结果是,转子芯部16与转轴25连接。即,转子15与转轴25连接。另外,具有凸部250的转轴25和具有第一凹部162的转子芯部16构成花键。
32.回到图1,凸缘部18保持定子11。具体而言,凸缘部18保持定子芯部12。凸缘部18以中心轴线ax为中心地配置成大致圆环状。具体而言,凸缘部18具有第一凸缘部19及第二凸缘部20。第一凸缘部19呈大致圆环状。第二凸缘部20呈大致圆环状。第一凸缘部19从轴向ad一侧覆盖定子11。第二凸缘部20从轴向ad另一侧覆盖定子11和转子15。第一凸缘部19和第二凸缘部20在轴向ad上夹着定子11,由此保持定子11。其结果是,定子11固定于凸缘部18。具体而言,定子芯部12固定于凸缘部18。
33.第一轴承30配置于转轴25的轴向ad一方端部。第一轴承30将转轴25支承为能相对于定子11及凸缘部18旋转。第一轴承30例如是滚珠轴承。第一轴承30具有内圈31、多个滚珠32及外圈33。内圈31固定于转轴25的外周面。多个滚珠32介于内圈31与外圈33之间,并沿周向cd排列。外圈33固定于第一凸缘部19的径向rd内周面。
34.在第一轴承30的内圈31与转子15之间配置有大致圆环状的间隔件r11。而且,大致圆环状的间隔件r10隔着内圈31配置于间隔件r11的相反侧。并且,内圈31隔着间隔件r10由间隔件r11和固定构件r1夹入,在轴向ad上被定位。
35.第二轴承35配置于转轴25的轴向ad另一方端部。第二轴承35将转轴25支承为能相对于定子11及凸缘部18旋转。第二轴承35例如是滚珠轴承。第二轴承35具有内圈36、多个滚珠37及外圈38。内圈36固定于转轴25的外周面。多个滚珠37介于内圈36与外圈38之间,并沿周向cd排列。外圈38固定于后述的输出旋转体55。另外,虽然图1中未示出,但实际上内圈36相对于输出旋转体55隔开间隔地分离。
36.接着,参照图3和图4,对减速器200及转轴25的详细情况进行说明。如图3所示,波
动发生器60具有第二连接部66。具体而言,波动发生器60具有波动轴承61及非正圆凸轮65。波动轴承61具有挠性。波动轴承61位于挠性外齿齿轮50的筒状部51的径向rd内侧。非正圆凸轮65以中心轴线ax为中心地呈环状扩展。在图3的示例中,非正圆凸轮65呈大致椭圆状。波动轴承61沿着非正圆凸轮65的外周面配置,以大致椭圆状挠曲。非正圆凸轮65具有第二连接部66。
37.第二连接部66与转轴25连接。具体而言,第二连接部66具有在周向cd上相连的n个第二凹部67。n个第二凹部67分别朝径向rd外侧凹陷并沿轴向ad延伸。n个第二凹部67设置于非正圆凸轮65的内周面。在俯视时,第二连接部66的形状与图2示出的第一连接部161的形状大致相同。
38.n个第二凹部67分别与图2示出的n个第一凹部162对应。n个第二凹部67分别在轴向ad上与n个第一凹部162相对。即,第一凹部162和第二凹部67沿着轴向ad排列在一直线上。
39.另一方面,转轴25的n个凸部250分别与n个第二凹部67嵌合。其结果是,非正圆凸轮65与转轴25连接。即,波动发生器60与转轴25连接。转轴25作为减速器200的输入轴起作用。另外,具有凸部250的转轴25和具有第二凹部67的非正圆凸轮65构成花键。
40.图4是示出马达100的转轴25的立体图。如图4所示,在转轴25中,n个凸部250沿轴向ad延伸。而且,n个凸部250在周向cd上隔开间隔排列。只要第一凹部162(图2)及第二凹部67(图3)嵌合于凸部250,各凸部250可以在轴向ad上切断,也可以在轴向ad上连续。
41.转轴25还具有固定构件配置部251、252、253、254。固定构件配置部251~254分别在周向cd上穿过n个凸部250。固定构件配置部251~254在轴向ad上隔开间隔配置。固定构件配置部251~254分别朝径向rd内侧凹陷。图1中的固定构件r1、r2、r3、r4分别配置于固定构件配置部251、252、253、254。
42.以上,如参照图2~图4说明的那样,根据实施方式1,设置于转轴25的凸部250沿轴向ad延伸,由此,凸部250与转子15的第一凹部162及波动发生器60的第二凹部67双方嵌合。因此,能利用构造简单的转轴25将马达100的旋转力传递至减速器200。
43.接着,参照图5、图6a及图7对马达主体10与减速器200之间的密封结构进行说明。图5是将图1的减速装置sr的一部分放大示出的纵剖图。另外,在图5中,为了简便,省略了图1的固定构件r3、r4。
44.图5示出的减速器200的内部有润滑脂存在。即,润滑脂填充于减速器200的内部。例如,减速器200具有空间sp1、sp2、sp3。并且,润滑脂充满空间sp1、sp2、sp3。因此,需要防止减速器200的润滑脂侵入马达主体10。因为,尤其在实施方式1中,马达主体10与减速器200在轴向ad上靠近。
45.马达主体10的第二凸缘部20位于减速器200与马达主体10的定子11及转子15之间。第二凸缘部20在轴向ad上与马达主体10的定子11及转子15相对。而且,第二凸缘部20在轴向ad上与减速器200的刚性内齿齿轮40、挠性外齿齿轮50及波动发生器60相对。
46.具体而言,第二凸缘部20具有第一环部191及第二环部192。第一环部191呈大致圆环状。第一环部191在轴向ad上与刚性内齿齿轮40相对。并且,第一环部191在轴向ad上相对于刚性内齿齿轮40固定。第一环部191从轴向ad接触刚性内齿齿轮40。
47.第二环部192位于比第一环部191靠径向rd内侧的位置。第二环部192是大致圆环
状的平板构件,从第一环部191朝轴向ad内侧扩展。第二环部192在轴向ad上与刚性内齿齿轮40、挠性外齿齿轮50及波动发生器60相对。而且,第二环部192在轴向ad上与定子11及转子15相对。第二环部192在轴向ad上与转子15分开。第二环部192从第一环部191朝径向rd内侧延伸。第二环部192的前端部在径向rd上与转轴25隔开间隔相对。
48.减速装置sr还具有密封部90。密封部90在转轴25的径向rd外侧对减速器200与马达主体10之间进行密封。因此,根据实施方式1,能防止减速器200的润滑脂侵入马达主体10。
49.图6a是放大示出密封部90的纵剖图。即,图6a放大示出图5的区域a。如图6a所示,密封部90具有迷宫结构。具体而言,密封部90具有第一迷宫部91及第二迷宫部92。第一迷宫部91设置于非正圆凸轮65的轴向ad侧面。第一迷宫部91具有凸凹形状。另一方面,第二迷宫部92设置于第二环部192的径向rd前端部。第二迷宫部92在轴向ad上与第一迷宫部91相对。第二迷宫部92具有凸凹形状。
50.第一迷宫部91的凸凹形状与第二迷宫部92的凸凹形状啮合,由此密封减速器200与马达主体10之间。
51.图7是示出非正圆凸轮65的俯视图。如图7所示,设置于非正圆凸轮65的第一迷宫部91被设置成在俯视时包围中心轴线ax的大致圆环状。另外,虽省略了图示,但第二迷宫部92也被设置成在俯视时包围中心轴线ax的大致圆环状。
52.接着,参照图6b~图6d对密封部90的其他示例进行说明。图6b是放大示出密封部90的另一示例(以下,密封部90a)的纵剖图。如图6b所示,密封部90a由油密封件构成。密封部90a呈包围中心轴线ax的大致圆环状。另一方面,第二环部192在径向rd的前端部193处朝轴向ad弯曲。并且,密封部90a配置于非正圆凸轮65的轴向ad侧面与第二环部192的前端部193之间。其结果是,减速器200与马达主体10之间由密封部90a密封。
53.图6c是放大示出密封部90的又一示例(以下,密封部90b)的纵剖图。如图6c所示,密封部90b由v形环构成。密封部90b呈包围中心轴线ax的大致圆环状。密封部90b配置于非正圆凸轮65的轴向ad侧面与第二环部192的径向rd的前端部之间。其结果是,减速器200与马达主体10之间由密封部90b密封。
54.图6d是放大示出密封部90的又一示例(以下,密封部90c)的纵剖图。如图6d所示,密封部90c由o形环构成。密封部90c呈包围中心轴线ax的大致圆环状。密封部90c配置于非正圆凸轮65的轴向ad侧面与第二环部192的径向rd的前端部之间。其结果是,减速器200与马达主体10之间由密封部90c密封。
55.另外,只要能密封减速器200与马达主体10之间,密封部90、90a~90c的结构没有特别限定。而且,在图6a~图6d中,为了简便,省略了图1的固定构件r3。
56.接着,参照图1和图3,对减速器200的详细情况进行说明。图1和图3示出的减速器200是利用刚性内齿齿轮40与挠性外齿齿轮50的差动对输入的旋转运动进行减速的装置。具有减速器200的减速装置sr例如被装入自行车、小型机器人的关节、辅助套装、转台、机床的分度头、轮椅或无人搬运车。不过,减速装置sr被装入的对象没有特别限定。
57.如图1和图3所示,减速器200还具有输出旋转体55、外壳70、轴承80、密封构件85、固定构件r3及固定构件r4。而且,减速器200的输入轴是马达100的转轴25。减速器200的输出轴是输出旋转体55。输出旋转体55例如是衬套。
58.刚性内齿齿轮40是以中心轴线ax为中心呈大致圆环状扩展的构件。刚性内齿齿轮40的刚性比挠性外齿齿轮50的筒状部51的刚性高。因此,刚性内齿齿轮40实质上能视为刚体。刚性内齿齿轮40在内周面具有多个内齿41。多个内齿41沿周向cd以固定的间距排列。
59.挠性外齿齿轮50除了具有筒状部51,还具有平板部52。筒状部51是以中心轴线ax为中心沿轴向ad呈筒状延伸的部位。而且,筒状部51具有挠性,是能在径向rd上挠曲的圆筒状的部分。筒状部51的轴向ad的一端部配置于刚性内齿齿轮40的径向rd内侧。而且,平板部52是与筒状部51相比不易挠曲的平板状的部分。平板部52是从筒状部51的轴向ad另一端部朝径向rd内侧扩展的部位。
60.挠性外齿齿轮50在一端部附近的外周面具有多个外齿511。多个外齿511沿周向cd以固定的间距排列。在平板部52固定有用于提取减速后的动力的输出轴即输出旋转体55。
61.在波动发生器60中,非正圆凸轮65是以中心轴线ax为中心地呈环状扩展的构件。非正圆凸轮65与作为输入轴的转轴25连接。因此,非正圆凸轮65利用转轴25的旋转而以中心轴线ax为中心以减速前的转速旋转。在实施方式1中,非正圆凸轮65具有椭圆形的凸轮轮廓。换言之,非正圆凸轮65根据周向cd的位置而具有不同的外径。进一步换言之,非正圆凸轮65的外缘呈大致椭圆状。
62.非正圆凸轮65在轴向ad上被固定构件r3和固定构件r4夹着。其结果是,非正圆凸轮65在轴向ad上被定位。
63.波动轴承61是位于挠性外齿齿轮50的筒状部51的径向rd内侧的挠性轴承。波动轴承61呈大致环状。波动轴承61例如是滚珠轴承。波动轴承61具有内圈62、多个滚珠63及能弹性变形的外圈64。内圈62固定于非正圆凸轮65的外周面。多个滚珠63介于内圈62与外圈64之间,并沿周向cd排列。外圈64以反映旋转的非正圆凸轮65的凸轮轮廓的方式经由内圈62及滚珠63弹性变形(挠曲变形)。而且,外圈64与挠性外齿齿轮50的筒状部51的具有外齿511的部位的内周面接触。具体而言,外圈64固定于筒状部51的具有外齿511的部位的内周面。波动发生器60根据周向cd的位置而具有不同的外径,并且在刚性内齿齿轮40的径向rd内侧以中心轴线ax为中心以减速前的转速旋转。
64.输出旋转体55固定于第二轴承35的外圈38。具体而言,第二轴承35具有筒状躯干部551及轴承保持部552。轴承保持部552保持第二轴承35。具体而言,第二轴承35的外圈38固定于轴承保持部552的径向rd内周面。筒状躯干部551呈沿周向cd包围中心轴线ax的大致圆筒状。筒状躯干部551沿轴向ad延伸。
65.外壳70收容挠性外齿齿轮50的筒状部51的一部分及平板部52。外壳70在轴向ad的一端固定于刚性内齿齿轮40。而且,在外壳70的轴向ad的另一端,外壳70的径向rd内表面隔着轴承80及密封构件85与筒状躯干部551的外周面相对。
66.具体而言,外壳70具有大致圆筒状的第一圆筒部71、大致圆环状的平板部72及大致圆筒状的第二圆筒部73。第一圆筒部71的轴向ad的一端部在轴向ad上与刚性内齿齿轮40相对,且固定于刚性内齿齿轮40。第一圆筒部71包围中心轴线ax,且沿轴向ad延伸。平板部72从第一圆筒部71的轴向ad上的另一端朝中心轴线ax沿径向rd扩展。第二圆筒部73从平板部72的径向rd内侧端部沿轴向ad延伸。第二圆筒部73包围中心轴线ax,且沿轴向ad延伸。
67.密封构件85呈大致圆环状。密封构件85配置于第二圆筒部73的内周面与筒状躯干部551的外周面之间。并且,密封构件85将第二圆筒部73的内周面与筒状躯干部551的外周
面之间密封。密封构件85例如是油密封件。通过密封构件85,能防止存在于减速器200的内部的润滑脂泄漏至外部。
68.轴承80呈大致环状。轴承80配置于第二圆筒部73的内周面与筒状躯干部551的外周面之间。轴承80配置于比密封构件85靠近挠性外齿齿轮50的位置。轴承80例如是滚珠轴承。轴承80具有内圈81、多个滚珠82及外圈83。内圈81固定于筒状躯干部551的外周面。多个滚珠82介于内圈81与外圈83之间,并沿周向cd排列。外圈83固定于第二圆筒部73的径向rd内周面。
69.在如上所述的结构的减速器200中,当马达100的转轴25以减速前的转速旋转时,非正圆凸轮65以减速前的旋转速度旋转。即,非正圆凸轮65以与转轴25的旋转速度相同的旋转速度旋转。并且,伴随非正圆凸轮65的旋转,经由波动轴承61对挠性外齿齿轮50的筒状部51的具有外齿511的部位的内周面进行按压,由此,筒状部51以椭圆状挠曲变形。此外,筒状部51在非正圆凸轮65所形成的椭圆的长轴的两端的两处径向rd外侧附近向随着朝向一端部而扩径的方向(随着朝向另一端部而缩径的方向)倾斜。其结果是,在椭圆的长轴的两端的两处径向rd外侧附近,外齿511与内齿41啮合。
70.当非正圆凸轮65旋转时,非正圆凸轮65形成的椭圆的长轴的两端的位置在周向cd上移动,外齿511与内齿41的啮合部也在周向cd上移动。这里,刚性内齿齿轮40的内齿41的齿数与挠性外齿齿轮50的外齿511的齿数略微不同。因此,非正圆凸轮65每旋转一周时,内齿41与外齿511的啮合部略微改变。其结果是,相对于刚性内齿齿轮40,挠性外齿齿轮50及输出旋转体55以被减速的转速旋转。即,挠性外齿齿轮50及输出旋转体55一边使挠性外齿齿轮50的外齿511与刚性内齿齿轮40的内齿41的啮合部在周向cd上移动,一边利用外齿511与内齿41的齿数的不同来相对于刚性内齿齿轮40相对旋转。
71.另外,在参照图1和图3说明的减速器200中,作为“挠性构件”的一例,对挠性外齿齿轮50进行了说明,作为“环状构件”的一例,对“刚性内齿齿轮40”进行了说明。不过,只要能将第一转速的旋转运动转换成比第一转速低的第二转速的旋转运动,“挠性构件”和“环状构件”就没有特别限定。例如,在减速器200进行利用了牵引(摩擦)的减速的情况下,“挠性构件”具有挠性,但可以不具有外齿,“环状构件”具有弹性,但可以不具有内齿。在该情况下,“挠性构件”的外周面与“环状构件”的内周面经由润滑油的油膜而接触。
72.(实施方式2)参照图8和图9对本发明实施方式2的自行车300进行说明。实施方式2的自行车300装设有参照图1说明的减速装置sr。因此,以下适当省略减速装置sr的说明。
73.图8是示出实施方式2的自行车300的图。如图8所示,自行车300具有前轮310、后轮320、踏板330、曲柄臂340、滚链350及减速装置sr。踏板330分别配置于自行车300的两侧面。曲柄臂340分别配置于自行车300的两侧面。踏板330旋转自如地安装于曲柄臂340。以下,将踏板330的旋转方向中的一个方向设为“顺方向”。在用户沿顺方向蹬踏板330时,踏板330的旋转运动经由滚链350向后轮320传递。其结果是,后轮320旋转,通过后轮320和前轮310的旋转,自行车300向前方行进。
74.而且,减速装置sr配置于在自行车300的两侧面配置的踏板330之间。而且,减速装置sr配置于对滚链350进行覆盖的链盖351的内部。例如,在出发时或者行使于上坡路时,在踏板330的负载较大的情况下,减速装置sr向踏板330供给顺方向的旋转驱动力。即,减速装
置sr作为电动辅助装置起作用。因此,减轻了用户蹬踏板330的力。其结果是,用户能够轻松地驾驶自行车300。
75.在本实施方式中,自行车300装设了能使轴向ad的长度较小的减速装置sr,因此,能使自行车300的轴向的长度较小。尤其,根据实施方式2,自行车300装设了能使轴向ad的长度较小的减速装置sr,因此,能抑制自行车300的重量增加。而且,减速装置sr的轴向ad的长度较小,因而减速装置sr不会造成妨碍,用户容易蹬踏板330。
76.图9是示出装设于自行车300的减速装置sr的纵剖图。自行车300具有减速装置sr、踏板330、曲柄轴360及链轮370。在本实施方式中,如图9所示,自行车300还具有曲柄轴360、链轮370、单向离合器380、轴承385及轴承390。另外,为了易于观察附图,曲柄轴360以白色示出。
77.曲柄轴360是沿中心轴线ax延伸的大致圆柱状的构件。曲柄轴360沿轴向ad贯穿减速装置sr的转轴25。曲柄轴360沿轴向ad贯穿减速装置sr的转轴25及输出旋转体55。而且,曲柄轴360由来自踏板330(图8)的踏力驱动。
78.曲柄轴360的轴向ad的两端向减速装置sr的外侧突出。在曲柄轴360的轴向ad的两端分别固定有曲柄臂340。当自行车300的用户蹬着与曲柄臂340连接的踏板330(图8)时,踏力(人力)使得踏板330、曲柄臂340及曲柄轴360以中心轴线ax为中心旋转。
79.在链轮370上连接有减速装置sr的输出轴。链轮370与减速器200的输出轴即输出旋转体55连接。具体而言,链轮370固定于减速器200的输出轴即输出旋转体55。链轮370与轴向ad大致正交。链轮370将经由单向离合器380及输出旋转体55被传递的曲柄轴360的旋转向滚链350传递。链轮370呈以中心轴线ax为中心的大致圆板状。链轮370在外周部具有多个外齿。链轮370经由多个外齿与自行车300的滚链350卡合。当曲柄轴360因来自踏板330的踏力而旋转时,链轮370经由单向离合器380及输出旋转体55而以中心轴线ax为中心旋转。其结果是,滚链350在链轮370与后轮320之间转动。
80.在转轴25的内周面配置有轴承385及轴承390。轴承385及轴承390例如是滚珠轴承。轴承385及轴承390沿轴向ad隔开间隔排列。轴承385及轴承390将曲柄轴360支承为能旋转。轴承385具有内圈386、多个滚珠387及外圈388。内圈386固定于曲柄轴360的外周面。多个滚珠387介于内圈386与外圈388之间,并沿周向cd排列。外圈388固定于转轴25的内周面。轴承390具有内圈391、多个滚珠392及外圈393。内圈391固定于曲柄轴360的外周面。多个滚珠392介于内圈391与外圈393之间,并沿周向cd排列。外圈393固定于转轴25的内周面。
81.单向离合器380是仅允许输出旋转体55相对于曲柄轴360的相对旋转朝向一个方向的机构。单向离合器380在径向rd上配置于输出旋转体55与曲柄轴360之间。具体而言,单向离合器380在径向rd上配置于输出旋转体55内周面与曲柄轴360的外周面之间。
82.在曲柄轴360的顺方向的旋转速度大于输出旋转体55的顺方向的旋转速度的情况下,单向离合器380允许曲柄轴360的旋转。因此,在减速装置sr的马达100未驱动时,自行车300的用户能够在不会受到马达100的阻力的情况下经由踏板330使曲柄轴360旋转。在该情况下,链轮370仅通过曲柄轴360的旋转力旋转。
83.不过,单向离合器380禁止输出旋转体55的顺方向的旋转速度大于曲柄轴360的顺方向的旋转速度。因此,在马达100驱动且输出旋转体55的顺方向的旋转速度追上曲柄轴360的顺方向的旋转速度时,曲柄轴360以与输出旋转体55相同的旋转速度沿顺方向旋转。
84.电动机还具有控制器400和扭矩传感器410。扭矩传感器410以非接触的方式对曲柄轴360的应变进行检测,并将应变量转换为扭矩值。扭矩传感器410将示出曲柄轴360的扭矩值的检测信号输入到控制器400。
85.控制器400安装有用于将驱动电流供给至定子11的线圈14的电路。控制器400与线圈14、扭矩传感器410及电池(未图示)电连接。控制器400具有微型计算机。微型计算机具有处理器及存储器。
86.控制器400从扭矩传感器410接收示出曲柄轴360的扭矩的检测信号。而且,在控制器400的存储器中存储有预先设定的扭矩的阈值。控制器400在从扭矩传感器410接收的检测信号所示出的扭矩值小于阈值的情况下,不向线圈14供给驱动电流。因此,马达100不驱动。另一方面,当从扭矩传感器410接收的检测信号所示出的扭矩值变为阈值以上时,控制器400利用从电池供给的电力生成与扭矩值对应的驱动电流,并供给到线圈14。其结果是,马达100驱动。
87.在使马达100驱动且输出旋转体55的顺方向的旋转速度小于曲柄轴360的顺方向的旋转速度的情况下,基于马达100的旋转力且被减速的旋转力被传递至输出旋转体55。其结果是,链轮370通过基于马达100的旋转力且被减速的旋转力以及因用户的踏力而产生的曲柄轴360的旋转力来旋转。
88.另一方面,在使马达100驱动且输出旋转体55的顺方向的旋转速度大于曲柄轴360的顺方向的旋转速度的情况下,单向离合器380的作用使得链轮370仅通过因用户的踏力而产生的曲柄轴360的旋转力来旋转。
89.以上,参照附图对本发明的实施方式进行了说明。但是,本发明不限于上述实施方式,能在不脱离其主旨的范围内以各种方式实施。而且,能通过将上述实施方式公开的多个构成要素适当组合,形成各种发明。例如,可以从实施方式所示的所有构成要素中去除几个构成要素。例如,可以对不同实施方式中的构成要素进行适当组合。此外,为了便于理解,附图示意性地示出了各结构要素的主体,为了便于制图,图示的各结构要素的厚度、长度、个数、间隔等有时与实际不同。而且,上述实施方式所示的各结构要素的材质、形状、尺寸等为一例而没有特别限定,能在不实质脱离本发明的效果的范围内进行各种变更。
90.本发明例如能用于减速装置和自行车。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1