一种超声检测用管道爬行机器人的制作方法
1.本发明涉及一种金属无损检测领域,具体是一种超声检测用管道爬行机器人。
背景技术:
2.无损检测是在不损坏工件或原材料工作状态的前提下,对被检验部件的表面和内部质量进行检查的一种检测手段,超声波检测(ultrasonic testing)缩写为ut,也叫超声检测,是利用超声波技术进行检测工作的,是五种常规无损检测方法的一种。
3.在进行管道的超声检测时,是可以在管道外部通过探头进行超声检测的,但是需要人工在外部握持探头贴近管道表面进行检测,在处理堆叠的管道时就无法方便进行的检测;或者在已经安装完毕的管道时,某些情况下在外部检测就显得极为不便。
技术实现要素:
4.本发明的目的在于提供一种超声检测用管道爬行机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种超声检测用管道爬行机器人,超声检测用管道爬行机器人,包括主支架、行走机构以及检测设备安装架;所述主支架为两端开口的圆筒状结构,主支架的内部中心处设有检测设备安装架,主支架的侧壁上成环形阵列设有三组行走机构;
7.所述检测设备安装架呈圆筒状,检测设备安装架的一端开口设置,检测设备安装架上开口端的内壁设有内螺纹,检测设备安装架的开口端螺纹连接有封盖,封盖的中心处开设有走线孔,检测设备安装架用于安装超声检测的探头和设备;
8.所述主支架的侧壁上开设有三个行走机构安装槽,行走机构安装槽的侧部还开设有动力设备安装槽,行走机构安装在行走机构安装槽内,动力设备安装槽内安装有动力设备,动力设备与行走机构相连接。
9.所述行走机构包括固定支架,所述固定支架呈等腰梯形状,固定支架的底部前后两端分别转动连接有前摇臂和后摇臂,固定支架的顶部前后两端分别固定连接有前固定臂和后固定臂,固定支架的顶部中心与主支架的侧壁通过支架连接板固定连接;
10.前摇臂的前端转动连接有前轮毂,前轮毂通过前轮轴与前摇臂的前端转动连接,同时前轮轴的左端固定连接有前从动链轮;
11.所述后摇臂的后端转动连接有后轮毂,后轮毂通过后轮轴与后摇臂的后端转动连接,同时后轮轴的左端固定连接有后从动链轮,同时前从动链轮和后从动链轮错位设置。
12.所述前摇臂的顶部一体成型有前下连接臂,前下连接臂的顶部转动连接前调节弹簧的一端,前调节弹簧的另一端与前固定臂顶部转动连接。
13.所述后摇臂的顶部一体成型有一后下连接臂,后下连接臂的顶部转动连接后调节弹簧的一端,后调节弹簧的另一端与后固定臂顶部转动连接。
14.所述动力设备包括驱动电机,驱动电机驱动连接主动轮,主动轮驱动连接上从动
轮,上从动轮固定连接在上轮轴,上轮轴转动连接在动力设备安装槽的侧壁,同时上轮轴上还固定连接有前主动链轮和后主动链轮,前主动链轮与前从动链轮对应设置,前主动链轮通过链条驱动连接前从动链轮,后主动链轮通过链条驱动连接后从动链轮。
15.所述检测设备安装架与主支架之间设有若干根安装架连接杆。
16.所述安装架连接杆的截面呈倒置的三角形。
17.所述固定支架的底部固定连接有一块防护板,其中,防护板与固定支架相互垂直设置。
18.与现有技术相比,本发明的有益效果是:本发明作业时,将设备整体塞入管道内,此时由于通过前调节弹簧和后调节弹簧的存在使得本发明的轮毂能够始终抵接管道的内壁,同时由于每个轮毂都配备有相对独立的传动系统,即使摇臂转动,传动系统也能都始终驱动轮毂转动,驱动电机带动轮毂转动从而驱使设备整体行进;本发明适用于传统超声检测探头难以进入的管道内部,便于配合超声检测设备使用。
附图说明
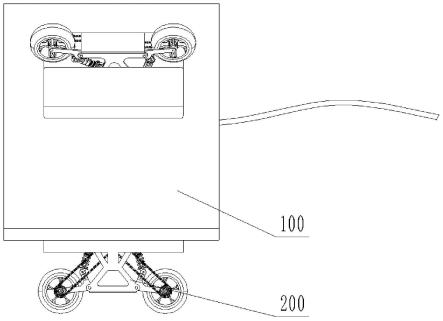
19.图1为一种超声检测用管道爬行机器人的正视图。
20.图2为一种超声检测用管道爬行机器人的横向的剖视图图。
21.图3为一种超声检测用管道爬行机器人侧向的剖视图。
22.图4为一种超声检测用管道爬行机器人中行走机构的结构示意图。
23.图5为一种超声检测用管道爬行机器人中行走机构的侧视图。
具体实施方式
24.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.请参阅图1-5,一种超声检测用管道爬行机器人,包括主支架100、行走机构以及检测设备安装架400;
26.所述主支架100整体呈两端开口的圆筒状,主支架100作为结构的主体,主支架100的内部中心处设有检测设备安装架400,主支架100的侧壁上成环形阵列设有三组行走机构。
27.所述检测设备安装架400呈圆筒状,检测设备安装架400的一端开口设置,检测设备安装架400的开口端的内壁设有内螺纹,检测设备安装架400的开口端螺纹连接有封盖401,封盖401的中心处开设有走线孔402,检测设备安装架400用于安装超声检测的探头和设备,超声检测的探头和设备,均为现有设备,在此不做赘述;走线孔402用于线缆穿过,线缆内设有电线和信号线路用于给超声检测设备提供电力以及输送超声检测设备反馈的信号;
28.所述检测设备安装架400与主支架100之间设有若干根安装架连接杆403,安装架连接杆403用于连接检测设备安装架400与主支架100;安装架连接杆403的截面呈倒置的三角形;
29.所述主支架100的侧壁上开设有三个行走机构安装槽101,行走机构安装槽101的侧部还开设有动力设备安装槽102,行走机构安装在行走机构安装槽101内,行走机构安装槽101与主支架100的内腔连通。
30.所述行走机构包括固定支架200,所述固定支架200呈等腰梯形状,固定支架200的底部前后两端分别转动连接有前摇臂210和后摇臂220,固定支架200的顶部前后两端分别固定连接有前固定臂230和后固定臂240,固定支架200的顶部中心与主支架100的侧壁通过支架连接板250固定连接;
31.所述前摇臂210和后摇臂220分别位于固定支架200的前后两侧,前摇臂210的前端转动连接有前轮毂211,前轮毂211通过前轮轴212与前摇臂210的前端转动连接,同时前轮轴212上固定连接有前从动链轮213;
32.所述后摇臂220的后端转动连接有后轮毂221,后轮毂221通过后轮轴222与后摇臂220的后端转动连接,同时后轮轴222上固定连接有后从动链轮223,同时前从动链轮213和后从动链轮213错位设置,前从动链轮213的位置相较于后从动链轮213的位置偏左,以便于链条的安装;
33.所述前摇臂210的顶部一体成型有一前下连接臂214,前下连接臂214的顶部转动连接前调节弹簧215的一端,前调节弹簧215的另一端与前固定臂230顶部转动连接;
34.所述后摇臂220的顶部一体成型有一后下连接臂224,后下连接臂224的顶部转动连接后调节弹簧225的一端,后调节弹簧225的另一端与后固定臂240顶部转动连接;
35.通过前调节弹簧215和后调节弹簧225的存在使得本发明的超声检测用管道爬行机器人能够适应一定范围内直径变化的管道的行进作业;
36.动力设备安装槽内安装有动力设备300,所述动力设备300包括驱动电机301,驱动电机301驱动连接主动轮302,主动轮302驱动连接上从动轮303,上从动轮303固定连接在上轮轴304,上轮轴304转动连接在动力设备安装槽102的侧壁,同时上轮轴304上还固定连接有前主动链轮305和后主动链轮306,前主动链轮305与前从动链轮213对应设置,前主动链轮305通过链条驱动连接前从动链轮213,后主动链轮306通过链条驱动连接后从动链轮223;
37.进一步的,所述固定支架200的底部固定连接有一块防护板260,其中防护板260与固定支架200相互垂直设置;
38.本发明作业时,将设备整体塞入管道内,此时由于通过前调节弹簧215和后调节弹簧225的存在使得本发明的轮毂能够始终抵接管道的内壁,同时由于每个轮毂都配备有相对独立的传动系统,即使摇臂转动,传动系统也能都始终驱动轮毂转动,驱动电机301带动轮毂转动从而驱使设备整体行进。
39.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方
位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,“设置”、“连接”等术语应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1