一种飞行器模拟机控制系统安装装置的制作方法
1.本发明涉及飞行器领域,更具体的说是一种飞行器模拟机控制系统安装装置。
背景技术:
2.飞行器模拟机需要安装一套控制系统,这类控制系统的外形类似配电柜,内部设置多种电路和多种控制组件,在安装这类控制系统的控制柜子时,就需要在地面上打下地基,将地面上的土夯实,进而将飞行器模拟机控制系统稳定的安装在其上对飞行器模拟机进行控制,但是现有技术中没有针对飞行器模拟机控制系统安装处的地面打下地基的设备。
技术实现要素:
3.为克服现有技术的不足,本发明提供一种飞行器模拟机控制系统安装装置,其有益效果为可以在需要安装飞行器模拟机控制系统的地面处打下地基。
4.一种飞行器模拟机控制系统安装装置,包括长方筒、凸轴、圆环和圆柱块,所述长方筒的前后两侧均设置有圆环,圆柱块设置在长方筒内,圆柱块的前后两端均固定连接有凸轴,两个凸轴分别插在两个圆环处。
5.一种飞行器模拟机控制系统安装装置还包括挡片,每个凸轴的外端均固定连接有挡片。
6.一种飞行器模拟机控制系统安装装置还包括凸棱,长方筒的外侧均布有多个凸棱。
7.一种飞行器模拟机控制系统安装装置还包括立杆、门架和短轴,门架固定连接在长方筒的前端,短轴固定连接在门架的前侧,短轴转动连接在立杆的下端。
附图说明
8.下面结合附图和具体实施方法对本发明做进一步详细的说明。
9.图1为一种飞行器模拟机控制系统安装装置的结构示意图一;
10.图2为一种飞行器模拟机控制系统安装装置的结构示意图二;
11.图3为一种飞行器模拟机控制系统安装装置的结构示意图三;
12.图4为长方筒的结构示意图一;
13.图5为长方筒的结构示意图二;
14.图6为立杆和固定架的结构示意图一;
15.图7为立杆和固定架的结构示意图二;
16.图8为转盘的结构示意图一;
17.图9为转盘的结构示意图二;
18.图10为转盘的结构示意图三;
19.图11为v形杆的结构示意图一;
20.图12为v形杆的结构示意图二;
21.图中:长方筒101;凸棱102;凸轴103;挡片104;圆环105;圆柱块106;
22.立杆201;门架202;短轴203;限位块204;平件i205;
23.固定架301;伺服电机i302;伺服电机ii303;主条架304;平件ii305;伺服电机iii306;主轴307;
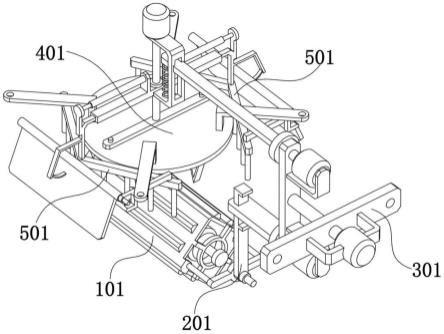
24.转盘401;三角框402;l形杆403;空心柱404;伸缩杆405;中轴406;伺服电机iv407;折架408;竖孔409;
25.v形杆501;插地柱502;连接架503;前轴504;挡件505;弹性板506;弧形弹杆507;侧架508。
具体实施方式
26.如图1-12所示,这个例子解决了使得长方筒101获得向下移动的惯性,进而将土地压实的问题,
27.飞行器模拟机控制系统安装装置包括长方筒101、凸轴103、圆环105和圆柱块106,两个圆环105分别固定连接在长方筒101的前后两侧,圆柱块106位于长方筒101内,两个凸轴103分别固定连接在圆柱块106的前后两端,两个凸轴103分别位于两个圆环105处,进而使得长方筒101在需要安装控制系统的土地上滚动,这时圆柱块106也随着长方筒101的滚动在长方筒101内移动,使得圆柱块106依靠重力不断撞击在长方筒101的内壁上,使得长方筒101获得向下移动的惯性,进而将土地压实,在需要安装飞行器模拟机控制系统的地面处打下地基,便于下一步对飞行器模拟机控制系统进行安装,两个凸轴103分别设置在两个圆环105处,进而使得圆柱块106仅仅可以在一定范围内移动,防止圆柱块106脱离长方筒101内部。
28.如图1-12所示,这个例子解决了防止圆柱块106相对长方筒101移动过大的距离的问题,
29.由于飞行器模拟机控制系统安装装置还包括挡片104,两个挡片104分别固定连接在两个凸轴103的外端,挡片104使得凸轴103无法相对圆环105前后移动过大的距离,进而防止圆柱块106相对长方筒101移动过大的距离。
30.如图1-12所示,这个例子解决了提升将土地压实的效果的问题,
31.由于飞行器模拟机控制系统安装装置还包括凸棱102,多个凸棱102设置在长方筒101的外侧,使得长方筒101压在土地上时,多个凸棱102能够压入土内,进而提升将土地压实的效果。
32.如图1-12所示,这个例子解决了通过左右移动立杆201的方式带动长方筒101在地面上滚动的问题,
33.由于飞行器模拟机控制系统安装装置还包括立杆201、门架202和短轴203,长方筒101的前端固定连接有门架202,门架202的前侧固定连接有短轴203,短轴203与立杆201的下端转动连接,进而使得长方筒101能够通过门架202转动,进而通过左右移动立杆201的方式带动长方筒101在地面上滚动,进而在长方筒101在地面上滚动的过程中,圆柱块106不断依靠重力砸在长方筒101的内壁上将土地压实。
34.如图1-12所示,这个例子解决了对长方筒101在滚动时的高低变化进行适应的问
题,
35.由于飞行器模拟机控制系统安装装置还包括限位块204和平件i205,立杆201竖向滑动连接在平件i205上,两个限位块204均设置在立杆201的上部位置,两个限位块204分别位于平件i205的上下两侧,进而使得长方筒101在滚动时,立杆201可以相对平件i205竖向移动,进而对长方筒101在滚动时的高低变化进行适应,并且两个限位块204可以防止立杆201脱离平件i205。
36.如图1-12所示,这个例子解决了使得长方筒101仍位于立杆201的下端位置对土地进行压平的问题,
37.由于飞行器模拟机控制系统安装装置还包括主条架304和伺服电机iii306,主条架304的一端转动连接了平件i205,伺服电机iii306设置在主条架304上,伺服电机iii306能够驱动平件i205在主条架304上转动,进而当主条架304不处于竖向方向上时,可以通过伺服电机iii306驱动平件i205转动的方式驱动立杆201仍保持竖直位置,进而使得长方筒101仍位于立杆201的下端位置对土地进行压平。
38.如图1-12所示,这个例子解决了将不同的工作机械切换到下方后在土地上进行工作的问题,
39.由于飞行器模拟机控制系统安装装置还包括固定架301、伺服电机i302和主轴307,主轴307固定连接在主条架304的后侧中部,主轴307与固定架301的中部转动连接,伺服电机i302固定在固定架301上,伺服电机i302可以驱动主轴307转动,进而固定架301用来固定在可以移动的车辆上,进而带动整个装置移动到工作位置,伺服电机i302可以驱动主轴307转动,进而驱动主条架304转动,主条架304的两端设置了不同的工作机械,进而将不同的工作机械切换到下方后在土地上进行工作。
40.如图1-12所示,这个例子解决了处理后地面更加平实的问题,
41.由于飞行器模拟机控制系统安装装置还包括伺服电机ii303、主条架304、平件ii305、转盘401和三角框402,平件ii305的端部转动连接在主条架304的一端,伺服电机ii303设置在主条架304上,伺服电机ii303驱动平件ii305在主条架304上转动,平件ii305上设置有转盘401,多个三角框402均设置在转盘401的下侧,进而转盘401上的多个三角框402可以插入地面,然后驱动转盘401转动带动多个三角框402转动,将地面上表层的土壤进行蓬松处理,然后便于长方筒101压在地面上表层的土壤上,这样处理后地面更加平实。伺服电机ii303转动时驱动主条架304转动,进而当主条架304转动后,伺服电机ii303驱动主条架304和主条架304上的转盘401转动,使得转盘401移动至下方后与土地平行。
42.如图1-12所示,这个例子解决了多个带有向下压力的三角框402转动,将地面上表层的土壤进行蓬松处理的问题,
43.由于飞行器模拟机控制系统安装装置还包括中轴406、伺服电机iv407、折架408和竖孔409,中轴406固定连接在转盘401的上侧,伺服电机iv407设置在折架408的上部,伺服电机iv407的输出轴固定连接在中轴406上,竖孔409设置在折架408上,平件ii305的一端竖向滑动连接在竖孔409上,折架408的下侧设置有压缩弹簧,压缩弹簧的上端固定连接在平件ii305上,当将转盘401切换至下侧后,驱动平件ii305向下移动,使得折架408上的压缩弹簧被压缩,然后使得转盘401通过压缩弹簧的弹力作用压在土地上,然后驱动转盘401转动带动多个三角框402转动,多个带有向下压力的三角框402转动,将地面上表层的土壤进行
蓬松处理。
44.如图1-12所示,这个例子解决了便于下一步通过多根钢筋对飞行器模拟机控制系统的箱子进行固定的问题,
45.有飞行器模拟机控制系统安装装置还包括l形杆403,四个l形杆403呈环形设置在转盘401上,四个l形杆403的外端均设置了圆孔,进而可以将不同的l形杆403上的圆孔移动至需要的位置,然后将钢筋插入圆孔,通过l形杆403扶着钢筋将钢筋钉入地面,便于下一步通过多根钢筋对飞行器模拟机控制系统的箱子进行固定。
46.所述飞行器模拟机控制系统安装装置还包括空心柱404、伸缩杆405、v形杆501、插地柱502和侧架508,空心柱404的中部固定连接在折架408的下端,v形杆501设置有两个,两个v形杆501的上侧均固定连接有侧架508,两个侧架508分别滑动连接在空心柱404的左右两端,空心柱404上固定连接有两个伸缩杆405,两个伸缩杆405的活动端分别固定连接在两个侧架508上,每个v形杆501的下侧均设置有多个插地柱502。
47.如图1-12所示,这个例子解决了多个插地柱502左右移动不断拨动土壤,进而将土壤进行摊平的问题,
48.伸缩杆405伸缩时驱动侧架508、v形杆501和多个插地柱502左右移动,在多个三角框402在土地内转动的同时,多个插地柱502左右移动不断拨动土壤,进而将土壤进行摊平。
49.所述飞行器模拟机控制系统安装装置还包括连接架503、前轴504、挡件505、弹性板506和弧形弹杆507,两个v形杆501上均固定连接有连接架503,两个弹性板506的前端均固定连接有前轴504,两个前轴504分别转动连接在两个连接架503上,两个连接架503上均固定连接有挡件505,两个挡件505分别垫在两个弹性板506的内侧,弹性板506的外侧固定连接有弧形弹杆507,弧形弹杆507的外端固定连接在侧架508的外部。
50.v形杆501左右移动的同时带动连接架503和弹性板506左右移动,弧形弹杆507不断给弹性板506向内转动的力,使得弹性板506的下沿可以压在土地表层,进而弹性板506左右移动时通过弧形弹杆507的弹力作用将三角框402和插地柱502形成的土地上的痕迹进行刮平,挡件505可以防止弹性板506向内转动过大,然后将土地上的痕迹进行刮平后,通过长方筒101将土地压实的,然后便于在需要安装飞行器模拟机控制系统的地面处打下地基,然后再下一步安装飞行器模拟机控制系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1