一种管道攀爬机器人的制作方法
1.本实用新型涉及一种管道攀爬机器人,属能源管道清洁与检查设备技术领域。
背景技术:
2.从上世纪下叶以来,在新的工业体系不断完善下,各行业对于能源的需求越来越大,而管道作为一种能高效运输气态与液态等能源的手段,自然而然得到了大量的运用。但这些铺遍全国各地的管道网络,随着时间推移,长时间工作下便会出现腐蚀、破裂等现象,存在着极大的安全隐患。这就直接促使我们必须定期地对管路进行安全性质的检测,若不能及时发现问题,防范于未然,后续问题将会无穷无尽。但由于管道内部的空间狭窄,且多伴随有毒有害气体,进行人工检查不但工作量大,而且也会给工作人员带来安全隐患。用机器人代替人工对管道进行检测,就成为了迫在眉睫的事情。而攀爬机器人应具备自动化检查与清洗这两项基本功能。
3.目前,国内外已经研究出许多具备管道内检查与清洗的机器人。其中,包括轮式管道爬行机器人,这种机器人的结构简单且对于管道的适应性能也比较强,但其越障的能力也欠佳,倘若当越过障碍物比较大时,就会容易导致管道发生卡死,使得整个机器人的作用功能丧失。还有履带式管道机器人,这种机器人与管道的接触面积很大,从而使得它攀附能力强,承重大,越障容易,但其结构复杂,体积大,容易侧翻。还有腿式管道攀爬机器人,这种机器人运动灵活,越障能力强。但它的结构复杂,在设计时需编辑好每个足之间的协调性,难度较大,不易实现。还包括蠕动管道机器人,这种机器人具有很高的安全隐患,如若在行走过程中气囊受到外部影响破裂后,就会导致机器人无法走动了。因此,设计出一款适应可以实现在竖直、倾斜、水平的直管和弯管中管道机器人,以满足能源管道清洁与检查使用的需要。
技术实现要素:
4.本实用新型的目的在于:针对现有技术存在的问题,提供一种能适用于能源管道的检测,同时要能对管道内壁进行清洁,以防止管道堵塞的攀爬机器人。
5.本实用新型的技术方案是:
6.一种管道攀爬机器人,包括前机体和后机体;前机体的后端通过万向节活动连接有后机体;其特征在于:所述的前机体包括前装配套、驱动单元、弹性伸缩件、转盘和清洁毛刷;所述的前装配套的一端通过万向节活动连接有后机体;前装配套的内部装有供电电源和清洁电机;清洁电机的输出轴延伸至前装配套外部后装有转盘;转盘的圆周面上固装有多个清洁毛刷;前装配套的外圈设置有多个驱动单元;驱动单元通过弹性伸缩件与前装配套的圆周面相连接。
7.所述的弹性伸缩件包括中间套筒、伸缩杆件、衔接座和缓冲弹簧;所述的中间套筒的两端分别活动插装有伸缩杆件;伸缩杆件的一端固装有衔接座;衔接座内侧的伸缩杆件上套装有缓冲弹簧;所述的伸缩杆件的另一端端头呈阶梯型结构,中间套筒的沿口设置有
限位内缘。
8.所述的驱动单元通过对称设置的两组弹性伸缩件与前装配套的圆周面相连接;两组弹性伸缩件的中间套筒之间通过连接杆相互连接。
9.所述的驱动单元包括底板、驱动电机、前旋转轴、后旋转轴、主动前轮、从动前轮、后轮a和后轮b;所述弹性伸缩件的衔接座上装有底板;底板上装有驱动电机;驱动电机一端的底板上通过轴承装有前旋转轴;驱动电机通过斜齿轮副与前旋转轴相连接;前旋转轴的一端固装有主动前轮,前旋转轴的另一端通过轴承安装有从动前轮;驱动电机另一端的底板上通过轴承装有后旋转轴;后旋转轴的一端通过轴承装有后轮a, 后旋转轴的另一端固装有后轮b。
10.所述的后机体包括后装配套、弹性伸缩件、支撑座和支撑轮;所述前装配套的一端通过万向节活动连接有后装配套;后装配套内部装有检测电源;后装配套的圆周面上通过多个弹性伸缩件安装有支撑座;支撑座上装有支撑轮。
11.所述的后装配套的圆周面上装有检测设备。
12.本实用新型的优点在于:
13.该管道攀爬机器人,结构紧凑、设计巧妙,能够在竖直、倾斜、水平的直管和弯管中行进,特别适合能源管道的检测和清洁使用的需要。
附图说明
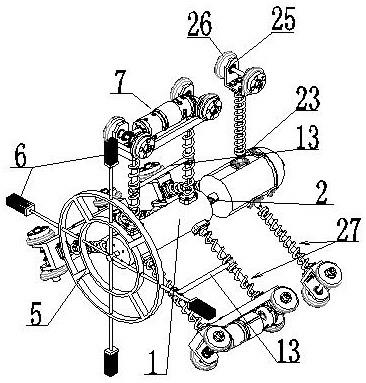
14.图1为本实用新型的结构示意图;
15.图2为本实用新型的主视剖面结构示意图;
16.图3为图2中a处的放大结构示意图;
17.图4为本实用新型驱动单元的结构示意图;
18.图5为本实用新型驱动单元的俯视结构示意图;
19.图6为图5中b处的放大结构示意图;
20.图7为本实用新型前机体的结构示意图。
21.图中:1、前装配套;2、万向节;3、供电电源;4、清洁电机;5、转盘;6、清洁毛刷;7、驱动单元;8、中间套筒;9、伸缩杆件;10、衔接座;11、缓冲弹簧;12、限位内缘;13、连接杆;14、底板;15、驱动电机;16、前旋转轴;17、斜齿轮副;18、主动前轮;19、从动前轮;20、后旋转轴;21、后轮a;22、后轮b;23、后装配套;24、检测电源;25、支撑座;26、支撑轮;27、弹性伸缩件。
具体实施方式
22.该管道攀爬机器人,包括前机体和后机体(参见说明书附图1)。
23.前机体包括前装配套1、驱动单元7、弹性伸缩件27、转盘5和清洁毛刷6(参见说明书附图1和2)。前装配套1的内部装有供电电源3和清洁电机4(参见说明书附图2);供电电源3能够为清洁电机4提供电源。
24.清洁电机4的输出轴延伸至前装配套1外部后装有转盘5(参见说明书附图1);清洁电机4工作时可带动转盘5同步转动;转盘5的圆周面上固装有多个清洁毛刷6;转盘5转动时即可带动清洁毛刷6同步转动,清洁毛刷6转动时即可完成管道的清洁工作。
25.前装配套1的外圈设置有多个驱动单元7(参见说明书附图1和2);驱动单元7包括
底板14、驱动电机15、前旋转轴16、后旋转轴20、主动前轮18、从动前轮19、后轮a21和后轮b22(参见说明书附图4)。
26.底板14上装有驱动电机15;驱动电机15与供电电源3电连接;驱动电机15一端的底板14上通过轴承装有前旋转轴16;驱动电机15通过斜齿轮副17与前旋转轴16相连接(参见说明书附图4和5)。驱动电机15工作时即可通过斜齿轮副17带动前旋转轴16同步转动。
27.前旋转轴16的一端固装有主动前轮18(参见说明书附图6)。前旋转轴16转动时即可带动主动前轮18主动转动。前旋转轴16的另一端通过轴承安装有从动前轮19(参见说明书附图6)。如此设置从动前轮19的目的在于:以使从动前轮19与前旋转轴16保持活动连接。
28.如此设置主动前轮18和从动前轮19的目的在于:当该管道攀爬机器人在弯型管道中行进过程中,该攀爬机器人将在主动前轮18驱动力的作用下沿着管道前行,从动前轮19将在管道摩擦力的作用下滚动;如此即可避免转弯时主动前轮18和从动前轮19由于差速问题导致“卡涩问题”的发生。
29.驱动电机15另一端的底板14上通过轴承装有后旋转轴20;后旋转轴20的一端通过轴承装有后轮a21, 后旋转轴20的另一端固装有后轮b22。工作时后轮a21和后轮b22与管道滚动连接,如此设置的目的在于:以使后轮a21和后轮b22相互之间呈现独立运动的状态,从而避免了转弯时后轮a21和后轮b22之间由于差速问题导致“卡涩问题”的发生。
30.驱动单元7通过对称设置的两组弹性伸缩件27与前装配套1的圆周面相连接(参见说明书附图1和2)。弹性伸缩件27包括中间套筒8、伸缩杆件9、衔接座10和缓冲弹簧11(参见说明书附图3)。
31.中间套筒8的两端分别活动插装有伸缩杆件9;伸缩杆件9的一端固装有衔接座10;衔接座10与驱动单元7上的底板14固定连接。
32.衔接座10内侧的伸缩杆件9上套装有缓冲弹簧11(参见说明书附图3)。
33.伸缩杆件9的另一端端头呈阶梯型结构,中间套筒8的沿口设置有限位内缘12(参见说明书附图3)。如此设置弹性伸缩件27的目的在于:以使中间套筒8能够通过限位内缘12对伸缩杆件9进行限位,使伸缩杆件9既能够与中间套筒8保持滑动伸缩,又能避免伸缩杆件9与中间套筒8之间发生“脱落”的问题。伸缩杆件9在缓冲弹簧11弹力的作用下,始终具有向外运动的趋势,当伸缩杆件9受压时,即可克服缓冲弹簧11弹力后向内收缩,如此即可使驱动单元7受压时,能够使伸缩杆件9克服缓冲弹簧11弹力后向内移动,如此即可使该管道攀爬机器人在管道内爬行时,驱动单元7能够在弹性伸缩件27的作用下,始终保持一定的压力与管道的内壁保持接触。
34.两组弹性伸缩件27的中间套筒8之间通过连接杆13相互连接(参见说明书附图1和2)。设置连接杆13的目的在于:以通过连接杆13将两组弹性伸缩件27连接呈一体结构,从而达到增强两组弹性伸缩件27整体强度的目的。
35.前机体的前装配套1的一端通过万向节2活动连接有后机体;后机体包括后装配套23、弹性伸缩件27、支撑座25和支撑轮26(参见说明书附图1和2)。
36.前装配套1的一端通过万向节2活动连接有后装配套23;后装配套23通过万向节2与前装配套1保持活动连接。
37.后装配套23内部装有检测电源24;后装配套23的圆周面上通过多个弹性伸缩件27安装有支撑座25;支撑座25上装有支撑轮26。该管道攀爬机器人在管道内爬行时,支撑轮26
能够在弹性伸缩件27的作用下,始终保持一定的压力与管道的内壁保持接触。
38.后装配套23的圆周面上装有检测设备。检测设备包括光源、摄像头等外购的检测设备,该检测设备所需要的电力由检测电源24提供。
39.该管道攀爬机器人在管道中工作时,后机体上的支撑轮26在弹性伸缩件27的作用下,始终保持一定的压力与管道的内壁保持接触;前机体上的驱动单元7能够在弹性伸缩件27的作用下,始终保持一定的压力与管道的内壁保持接触。
40.当驱动单元7上的驱动电机15工作时可通过斜齿轮副17带动前旋转轴16同步转动。前旋转轴16转动时即可带动主动前轮18主动转动。主动前轮18主动转动过程中即可驱动该管道攀爬机器人在管道中前行。在这一过程中从动前轮19、后轮a21和后轮b22将为该管道攀爬机器人提供支撑力,以达到稳定前机体防止其产生过大晃动的问题。
41.在该管道攀爬机器人在管道中前行过程中,后机体上的检测设备即可完成管道的检测工作。与此同时该管道攀爬机器人清洁电机4工作可带动转盘5同步转动;转盘5转动时即可带动清洁毛刷6同步转动完成管道的清洁工作。
42.该管道攀爬机器人,结构紧凑、设计巧妙,能够在竖直、倾斜、水平的直管和弯管中行进,特别适合能源管道的检测和清洁使用的需要。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1