一种应用于野生动物野外活动实时检测的智能机器人
1.本实用新型涉及机器人技术领域,特别涉及一种应用于野生动物野外活动实时检测的智能机器人。
背景技术:
2.随着人类活动空间的持续扩大以及对野生动物的捕获,生物的种类正在以每日160种的速度不停的消失。中国是濒危动物分布大国,据不完全统计,仅列入《濒危野生动植物种国际贸易公约》附录的原产于中国的濒危动物就有120多种(指原产地在中国的物种),列入《国家重点保护野生动物名录》的有257种,列入《中国濒危动物红皮书》的鸟类、两栖爬行类和鱼类有400种,列入各省、自治区、直辖市重点保护野生动物名录的还有成百上千种。随着经济的持续快速发展和生态环境的日益恶化,中国的濒危动物种类还会增加,濒危动物的野外种群数量稀少,而且继续呈下降趋势。因此,对动物的保护特别是濒危动物的保护便显得尤为重要,而对于濒危物种的识别与检测便成为一个热门且存在挑战的研究方向。
3.野生动物的生存与发展维系着整个生态系统的平衡与稳定。野生动物种类、数量和栖息地状况是生态系统变化和反映管理策略的重要指示因子。野生动物监测可以提供野生动物资源种类、数量和栖息地状况的必要信息,帮助研究人员掌握野生动物资源现状以及野生动物资源的动态变化,为有效保护、持续利用、科学管理野生动物资源提供依据。野生动物监测是保护稀濒危野生动物物种的一项重要工作内容,检测野生动物数量与种群动态变化对于保护濒危物种、评估管理效果以及制定管理策略至关重要。
4.传统的野生动物检测以人工检测或红外相机作为检测记录装置,然而人工检测随意性较大,检测工作量大,效率低,使得对野生动物活动区域及时间的检测存在错报漏报现象;红外相机存在取景角度固定,对于活动的野生动物来说不能采集到理想的活动图像,要求在相应区域设置多台红外相机才能取得良好的监控效果,增加了监控成本,监控效率低。目前缺少一种能全面适应野外环境并且支持长时间自动抓拍的摄像工具,来减少生态科考的图像采集任务难度。
技术实现要素:
5.本实用新型的目的在于提供一种应用于野生动物野外活动实时检测的智能机器人,以解决现有野生动物检测装置监控成本较高、灵活性较差、检测效率低的问题。
6.为实现上述目的,本实用新型提供一种应用于野生动物野外活动实时检测的智能机器人,包括机器人本体,所述机器人本体包括底盘和设置在底盘上方的云台拍摄机构,其中云台拍摄机构与底盘转动连接;所述底盘包括底座、舵轮机构、减震悬挂机构、防护机构,其中底座为矩形结构,该底座两长侧边分别设有两组舵轮机构;所述两组舵轮机构对称设置,其中每一舵轮机构分别与一减震悬挂机构连接;所述减震悬挂机构设置在两组舵轮机构之间,其中相邻两组减震悬挂机构通过悬挂固定板连接;所述防护机构设置在底盘周边,该防护机构与底座固定连接。
7.优选地,所述舵轮机构包括胶轮、轮毂、减速电机、餐盘轴承、第一直流无刷电机,所述胶轮安装在轮毂外侧,该轮毂中心安装有减速电机,其中减速电机的输出轴与轮毂固定连接;所述轮毂两侧分别设有第一连接板,其中第一连接板下方与轮毂活动连接,该第一连接板上方与餐盘轴承底部连接;所述餐盘轴承上方设有第一直流无刷电机,该第一直流无刷电机通过连接架与餐盘轴承连接;所述第一直流无刷电机输出端设有第一集电滑环,该第一集电滑环上方设有第二连接板,其中第二连接板与减震悬挂机构连接。
8.优选地,所述减震悬挂机构包括第一悬挂支架、第二悬挂支架、第三悬挂支架、减震器,其中第一悬挂支架顶端与第二连接板固定连接;所述第一悬挂支架上方通过螺栓与第二悬挂支架连接,该第一悬挂支架下方通过螺栓与第三悬挂支架连接。
9.优选地,所述减震器设有两组,其中两组所述减震器分别设置在第二悬挂支架和第三悬挂支架外侧;所述减震器上端与第二悬挂支架连接,该减震器下端与第三悬挂支架连接。
10.优选地,所述防护机构包括防护框和防护甲板,其中防护框设置在舵轮机构外侧所述防护框一端与底座固定连接,该防护框另一端与悬挂固定板固定连接;所述防护甲板设置在底盘四周,该防护甲板与底座固定连接。
11.优选地,所述云台拍摄机构包括固定支架、迷你电脑、第二直流无刷电机、摄像机、第三直流无刷电机、激光发射模块、图像传输模块、测速模块;所述固定支架包括连接板、第一支撑板、第二支撑板、安装座,其中连接板两侧分别与第一支撑板和第二支撑板下端固定连接,该第一支撑板和第二支撑板上端分别与安装座两侧连接;所述连接板上方固定安装有迷你电脑,该连接板下方设有第二直流无刷电机;所述第二直流无刷电机输出端设有第二集电滑环,该第二集电滑环上端与连接板底部连接,其中第二集电滑环外侧套设有交叉滚子轴承。
12.优选地,所述安装座下方设有摄像机,该摄像机与迷你电脑电性连接;所述安装座上方设有设有设有防护罩,该防护罩内固定安装有激光发射模块、图像传输模块、测速模块,其中激光发射模块、图像传输模块、测速模块分别与迷你电脑电性连接。
13.优选地,所述安装座两侧分别设有第一侧板和第二侧板,其中第一侧板与第一支撑板活动连接,第二侧板与第二支撑板活动连接;所述安装座靠近第一支撑板一端设有第三直流无刷电机,该第三直流无刷电机的输出端设有转盘,其中转盘上设有两组连杆;所述连杆一端与转盘铰接,该连杆另一端与第一支撑板铰接;所述第二支撑板顶端开设有弧形孔槽,其中第二侧板上设有限位滑块,该限位滑块设置在弧形孔槽内。
14.优选地,所述底座上方设有灯条、蓄电池、超级电容组、轴承座,其中灯条、蓄电池和超级电容组设置在底座靠后位置,轴承座设置在底座中间;所述轴承座上方设有云台拍摄机构,该轴承座与第二集电滑环外侧安装的交叉滚子轴承相适配。
15.与现有技术相比,本实用新型的有益效果是:本实用新型通过在底盘四周安装舵轮机构,其中舵轮机构采用gm6020直流无刷电机进行航向控制,采用m3508直流减速电机进行进控制,能够为底盘以及安装在底盘上的云台拍摄机构提供充足的动能,适应野外复杂地形并灵活控制的底盘运动;通过在底盘上方安装云台拍摄机构,其中云台可实现360
°
全方位旋转,带动摄像机全方位旋转检测并锁定目标物种,并根据检测对象的实时位置来调整云台摄像头角度姿态参数,根据野外动物的运动实时调整拍摄角度从而锁定拍摄动物于
视频中心区域,达到追踪拍摄的目的;采用舵轮底盘与云台拍摄机构相结合,能在野外进行自动巡检,可自动规划路径,适应多变地形,支持实时图像传输,而且装置成本较低,同时测量精度高、操作简单,使用者便于上手,能够实现非专业人士和多领域人群的使用。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
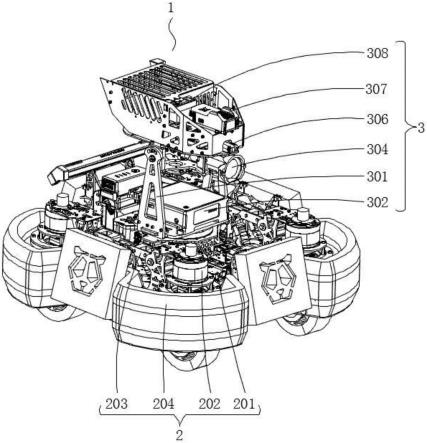
17.图1是本实用新型的结构示意图;
18.图2是本实用新型底盘的结构示意图;
19.图3是本实用新型云台拍摄机构的结构示意图;
20.图4是本实用新型云台拍摄机构后视结构示意图;
21.图5是本实用新型减震悬挂机构的结构示意图;
22.图6是本实用新型舵轮机构的结构示意图;
23.图7是本实用新型防护机构的结构示意图。
24.附图标号说明:1、机器人本体;2、底盘;201、底座;202、舵轮机构;2021、胶轮;2022、轮毂;2023、减速电机;2024、餐盘轴承;2025、第一直流无刷电机;203、减震悬挂机构;2031、第一悬挂支架;2032、第二悬挂支架;2033、第三悬挂支架;2034、减震器;204、防护机构;2041、防护框;2042、防护甲板;3、云台拍摄机构;301、固定支架;3011、连接板;3012、第一支撑板;3013、第二支撑板;3014、安装座;302、迷你电脑;303、第二直流无刷电机;304、摄像机;305、第三直流无刷电机;306、激光发射模块;307、图像传输模块;308、测速模块;4、悬挂固定板;5、第一连接板;6、连接架;7、第一集电滑环;8、第二连接板;9、第二集电滑环;10、交叉滚子轴承;11、防护罩;12、第一侧板;13、第二侧板;14、连杆;15、弧形孔槽;16、限位滑块;17、灯条;18、蓄电池;19、超级电容组;20、轴承座。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
27.在本实用新型中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
28.本实用新型提出一种应用于野生动物野外活动实时检测的智能机器人。
29.请结合参照图1至图7,本实用新型提供一种应用于野生动物野外活动实时检测的智能机器人,包括机器人本体1,所述机器人本体1包括底盘2和设置在底盘2上方的云台拍摄机构3,其中云台拍摄机构3与底盘2转动连接;所述底盘2包括底座201、舵轮机构202、减震悬挂机构203、防护机构204,其中底座201为矩形结构,该底座201两长侧边分别设有两组舵轮机构202;所述两组舵轮机构202对称设置,其中每一舵轮机构202分别与一减震悬挂机构203连接;所述减震悬挂机构203设置在两组舵轮机构202之间,其中相邻两组减震悬挂机203构通过悬挂固定板4连接;所述防护机构204设置在底盘2周边,该防护机构204与底座201固定连接。
30.具体地,舵轮机构202包括胶轮2021、轮毂2022、减速电机2023、餐盘轴承2024、第一直流无刷电机2025,所述胶轮2021安装在轮毂2022外侧,该轮毂2022中心安装有减速电机2023,其中减速电机2023的输出轴与轮毂2022固定连接,减速电机2023采用减速比为1:19的m3508减速电机,使其胶轮2021的移动速度最高可达3m/s,为底盘2提供驱动动力,可以满足快速移动的需求;所述轮毂2022两侧分别设有第一连接板5,其中第一连接板5下方与轮毂2022活动连接,该第一连接板5上方与餐盘轴承2024底部连接;所述餐盘轴承2024上方设有第一直流无刷电机2025,其中第一直流无刷电机2025通过连接架6与餐盘轴承2024连接,第一直流无刷电机2025为gm6020高性能直流无刷电机,通过第一直流无刷电机2025与餐盘轴承2024配合为底盘2提供航向的旋转;所述第一直流无刷电机2025输出端设有第一集电滑环7,该第一集电滑环7上方设有第二连接板8,其中第二连接板8与减震悬挂机构203连接。
31.具体地,减震悬挂机构203包括第一悬挂支架2031、第二悬挂支架2032、第三悬挂支架2033、减震器2034,其中第一悬挂支架2031顶端与第二连接板8固定连接;所述第一悬挂支架2031上方通过螺栓与第二悬挂支架2032连接,该第一悬挂支架2031下方通过螺栓与第三悬挂支架2033连接;所述减震器2034设有两组,其中两组减震器2034分别设置在第二悬挂支架2032和第三悬挂支架2033外侧;所述减震器2034上端与第二悬挂支架2032连接,该减震器2034下端与第三悬挂支架2033连接;减震器2034上的弹簧选用的刚度为4n/mm,可以有效增加底盘2移动时的稳定性,减少过颠簸路面时的震动,为云台拍摄机构3提供一个更稳定的拍摄环境,同时该减震器2034设计有可调节弹簧初始压缩量的旋钮,可以根据实际所需来改变实际使用刚度,增加其适用范围,使其拥有更出色的稳定性。
32.具体地,防护机构204包括防护框2041和防护甲板2042,其中防护框2041设置在舵轮机构202外侧,所述防护框2041一端与底座201固定连接,该防护框2041另一端与悬挂固定板4固定连接;所述防护甲板2042设置在底盘2四周,该防护甲板2042与底座201固定连接。防护框2041和防护甲板2042嵌套安装,可以对舵轮机构202和底盘2内部电子元件及线材进行保护,可以有效的缓解外来的撞击对底盘2造成的损害,其中防护框2041采用弹性模量较高的碳板和用来定型的方铝构成,在保证强度的同时最大程度的减轻质量,增加灵活性。
33.具体地,云台拍摄机构3包括固定支架301、迷你电脑302、第二直流无刷电机303、摄像机304、第三直流无刷电机305、激光发射模块306、图像传输模块307、测速模块308,其中第二直流无刷电机303选用gm6020高性能直流无刷电机,采用18mm空心轴设计,根据需求
在空心轴内安装第二集电滑环9,具有扭矩密度大、控制精度高、交互方式灵活、保护功能强等优点,为云台拍摄机构3旋转提供足够的驱动力。
34.具体地,固定支架301包括连接板3011、第一支撑板3012、第二支撑板3013、安装座3014,其中连接板3011两侧分别与第一支撑板3012和第二支撑板3013下端固定连接,该第一支撑板3012和第二支撑板3013上端分别与安装座3014两侧连接;所述连接板3011上方固定安装有迷你电脑302,该连接板3011下方设有第二直流无刷电机303;所述第二直流无刷电机303输出端设有第二集电滑环9,该第二集电滑环9上端与连接板3011底部连接,其中第二集电滑环9外侧套设有交叉滚子轴承10,第二集电滑环9实现底盘2与云台拍摄机构3的柔性连接,第二集电滑环9可实现两端电线相互转动,避免线路的缠绕,实现接线保护。通过第二直流无刷电机303驱动第二集电滑环9和交叉滚子轴承10转动,其中底盘2与云台拍摄机构3之间采用交叉滚子轴承10和第二集电滑环9连接,在保证旋转运动可以平稳实现的同时,带动云台拍摄机构3实现360
°
全方位旋转,提高云台拍摄机构3的机动性与灵活性;通过摄像机304检测并锁定目标物种,并根据激光发射模块306检测目标物种的实时位置来调整摄像机304角度姿态参数,并通过图像传输模块307将拍摄的图像传输至迷你电脑302内,达到追踪拍摄的目的。
35.具体地,安装座3014下方设有摄像机304,该摄像机304与迷你电脑302电性连接;所述安装座3014上方设有设有设有防护罩11,该防护罩11内固定安装有激光发射模块306、图像传输模块307、测速模块308,其中激光发射模块306、图像传输模块307、测速模块308分别与迷你电脑302电性连接。
36.所述安装座3014两侧分别设有第一侧板12和第二侧板13,其中第一侧板12与第一支撑板3012活动连接,第二侧板13与第二支撑板3013活动连接,所述安装座3014靠近第一支撑板3012一端设有第三直流无刷电机305,其中第三直流无刷电机305选用gm6020电机,该第三直流无刷电机305的输出端设有设有两组连杆14;所述连杆14一端与第三直流无刷电机305的输出端铰接,该连杆14另一端与第一支撑板3012铰接;通过第三直流无刷电机305连接两组连杆14进行传动,此设计避免了第三直流无刷电机305占用空间大,第三直流无刷电机305外露影响美观等问题,使机器人结构紧凑,空间利用率高,外形美观;所述第二支撑板3013顶端开设有弧形孔槽15,其中第二侧板13上设有限位滑块16,该限位滑块16设置在弧形孔槽15内;通过第二支撑板3013顶端开设弧形孔槽15与第二侧板13上的限位滑块16配合,其中弧形孔槽15长度通过计算确定,随着第三直流无刷电机305转动,带动第二侧板13上的限位滑块16在弧形孔槽15内滑动,从而控制摄像机304在俯角30
°
和仰角45
°
之间转动,提高摄像机304的稳定性。
37.具体地,底座201上方设有灯条17、蓄电池18、超级电容组19、轴承座20,其中灯条17、蓄电池18和超级电容组19设置在底座201靠后位置,将灯条17、超级电容组19和蓄电池18放置在底座201后部,以实现将重心后移的目的,其中蓄电池18为所有用电设备提供电源;所述轴承座20设置在底座201中间,该轴承座20上方设有云台拍摄机构3,其中轴承座20与第二集电滑环9外侧安装的交叉滚子轴承10相适配。底盘2与云台拍摄机构3之间通过轴承座20与交叉滚子轴承10转动连接,在保证旋转运动可以平稳实现的同时,使云台拍摄机构3实现360
°
全方位旋转,提高云台拍摄机构3的机动性与灵活性。
38.综上所述:本实用新型通过在底盘2四周安装舵轮机构202,能够为底盘2以及安装
在底盘2上的云台拍摄机构3提供充足的动能,适应野外复杂地形并灵活控制的底盘2运动;通过云台拍摄机构3带动摄像机304实现360
°
全方位旋转检测并锁定目标物种,并根据检测对象的实时位置来调整摄像机304角度姿态参数,根据野外动物的运动实时调整拍摄角度从而锁定拍摄动物于视频中心区域,达到追踪拍摄的目的;采用舵轮底盘与云台相结合,能在野外进行自动巡检,可自动规划路径,适应多变地形,支持实时图像传输,而且装置成本较低,同时测量精度高、操作简单,使用者便于上手,能够实现非专业人士和多领域人群的使用。
39.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1