一种基于知识特征与混合模型融合的管道泄漏检测方法
1.本发明涉及管道泄漏检测领域,具体涉及一种基于知识特征与混合模型融合的管道泄漏检测方法。
背景技术:
2.管道是工业、农业、以及城市基础设施的重要组成部分,但管道常常由于老化、腐蚀、焊缝缺陷、第三方破坏等因素产生大量的管道泄漏问题。因此管道泄漏检测要考虑到管道输送的水力学特征,以及过程的不确定性。
3.在日常生活及工业生产中,管道运输扮演着至关重要的角色。管道运输的优点在于其输送量大,输送过程易控制、价格低廉、建设简单、不受地面和气候等因素的影响,环境适应性强。但管道存在腐蚀、老化、连接等问题,以及各种外力作用的影响,管道泄漏问题普遍存在,造成了资源的浪费和巨大的经济损失。因此实现对管道泄漏的检测显得尤为重要。为此,工业界和学术界提出了很多管道泄漏检测的方法。现代管道泄漏检测方法一般基于管道外部测量变量或内部测量变量以构建检测模型从而能够实时在线进行管道泄漏检测。外部法通常基于检测管道外的泄漏特征,如基于声学法、基于光纤法。内部法通常基于管道压力、流量、温度等操作参数,如实时瞬态模型法、负压波法。从模型建立角度来看,基于机理模型和数据驱动模型的方法是管道泄漏检测的两种主要方法,两者各有其优缺点。一般来说,基于机理模型的方法依赖于偏差的生成与评估。这些方法的性能高度依赖于模型参数和传感器的准确性,而且需要大量的模拟和校准工作。数据驱动方法不需要任何具体深入的管道水力学知识,只需要从收集的历史数据中学习,再加上一些统计或模式识别工具。其中,基于人工神经网络(artificial neural network,ann)和支持向量机(support vector machine,svm)应用最多。
技术实现要素:
4.本发明提出了一种基于知识特征与混合模型融合的管道泄漏检测方法。
5.首先,建立一种融合实时瞬态机理模型与卷积神经网络数据驱动模型的管道混合建模方法,以准确预测管道运行工况;其次,针对过程普遍存在的不确定性,在混合模型中嵌入了管道输送过程的知识特征模型,提高模型的鲁棒性和对管道运行状态的预测能力;最后,对混合模型预测输出和实际测量值进行比较得到的偏差进行分析,来判断管道是否泄漏。此方法得到的模型精度较高,泄漏检测效果较好。
6.本发明的目的是:由于在实际过程中管道运行工况不确定、模型相关参数不准确、数据匹配性差,会导致机理模型的预测产生偏差,从而导致管道泄漏误报。本发明建立了一种融合知识特征的数据驱动模型和管道瞬态机理模型相结合的混合模型,其中,融合知识特征的卷积神经网络作为管道数据驱动模型对管道瞬态模型进行修正,提高了模型的精度,解决了因工况改变、泄漏特征小所造成的误报、漏报等问题。
7.本发明的技术解决方案为:将cnn用作数据驱动模型,对实时瞬态管道机理模型进
行修正,提高了模型的精度解决了因工况改变、泄漏特征小所造成的误报、漏报等问题。随着管道运行时间的增长,管内阻力结构发生变化,混合模型输出也会产生偏差,产生误报现象,因此将管道摩阻知识融入cnn,增强了模型的鲁棒性。
8.本发明将机理模型与数据驱动模型进行有效结合,在此基础上,融合知识特征,以有效地对管道运行状态进行准确预测。首先,基于水力学原理,建立简化的实时瞬态模型(real time transient model,rttm)机理模型;其次,通过卷积神经网络(convolutional neural networks,cnn)数据驱动模型提取管道运行数据的隐含特征信息,对rttm机理模型进行补充;考虑到过程的不确定性,在cnn数据驱动模型基础上引入领域知识这一学习要素,提出了一种融合数据、知识、机理的管道泄漏检测方法。
9.一种基于知识特征与混合模型融合的管道泄漏检测方法,包括以下步骤:
10.步骤1,建立管道流体实时瞬态管道机理模型;
11.步骤2,采用特征线法对步骤1中的管道流体实时瞬态管道机理模型进行优化;
12.步骤3,基于管道基本原理,提取管道内等效摩阻系数的知识特征;
13.步骤4,建立融合管道知识的数据驱动模型和基于机理与数据驱动的混合模型;
14.步骤5,融合管道知识的数据驱动模型中的卷积神经网络的输入为管道流体实时瞬态管道机理模型的边界条件输入值,输入值即为管道运行时的首端压力与末端流量,通过步骤2的模型计算即可得到管道运行时的首端流量和末端压力;
15.步骤6,通过步骤4中基于机理与数据驱动的混合模型得到具有实时性的管道运行数据;当管道泄漏发生时,通过步骤5计算后得到管道的首端流量及末端压力,作为模型计算值,将模型计算值与传感器的实际测量值进行比较,当偏差超过给定阈值时,则表明泄漏发生,表示为:
[0016][0017]
其中,q1为管道首端流量实际测量值,为首端流量计算值,p2为管道末端压力实际测量值,为末端压力计算值,σ1、σ2分别为设定的流量和压力阈值。
[0018]
步骤1中,建立管道流体实时瞬态管道机理模型,具体包括:
[0019]
对管道流体运动建立连续性方程和运动动量方程:
[0020][0021][0022]
其中,式(1)为流动连续性方程,式(2)为运动动量方程,式中,p为管道断面平均压力;v为管道断面平均流速;ρ为流体平均密度;f为水力摩阻系数;
ɡ
为重力加速度;θ为流体与水平轴的角度;d为管内径;a为压力波传播速度;t为时间;x为沿管线距离。
[0023]
步骤2中,采用特征线法对步骤1)中的管道流体实时瞬态管道机理模型进行优化,具体包括:
[0024]
采用特征线法对步骤1中的非线性偏微分方程式(1)和式(2)进行求解;特征线法
需要设定边界条件及管道初值,因此考虑管道稳态模型,不考虑时间的影响,由式(1)、(2)可得:
[0025][0026][0027]
式(4)和(5)即为管道的稳态模型,是一个常微分方程组,采用四阶龙格库塔法进行求解即可确定实时瞬态管道机理模型的初值;将管道的首末端作为边界条件,设定边界条件输入值为首端压力与末端流量。
[0028]
步骤3中,基于管道基本原理,提取管道内等效摩阻系数的知识特征,具体包括;
[0029]
基于管道基本原理,提取管道内等效摩阻系数的知识特征,具体包括:
[0030]
通过管道稳态模型式(4)和(5)可得:
[0031][0032][0033]
对方程组式(6)和(7)进行积分求解可得管道内等效摩阻系数和管内参数的关系:
[0034][0035][0036]
其中,q1为管道首端流量,q2为管道末端流量,p1为管道首端压力,p2为管道末端压力,为根据首端流量计算所得的等效摩阻系数,为根据末端流量计算所得的等效摩阻系数。
[0037]
步骤4中,建立融合管道知识的数据驱动模型和基于机理与数据驱动的混合模型,具体包括:
[0038]
将步骤3提取的管道内等效摩阻系数的知识特征融合进入一维卷积神经网络(1dcnn)中,结合后再通过全连接层,得到融合知识的数据驱动模型;
[0039]
机理模型如式(4)和(5)所示,融合知识的数据驱动模型对机理模型进行修正,得到基于机理与数据驱动的混合模型。
[0040]
与现有技术相比,本发明具有如下优点:
[0041]
本发明将cnn用作数据驱动模型,对实时瞬态管道机理模型进行修正,提高了模型的精度解决了因工况改变、泄漏特征小所造成的误报、漏报等问题。随着管道运行时间的增长,管内阻力结构发生变化,混合模型输出也会产生偏差,产生误报现象,因此将管道摩阻知识融入cnn,增强了模型的鲁棒性。本发明将管道知识融入到混合模型中,修正后的实时
瞬态管道混合模型的精度不会随着管道运行时间的增长和管内阻力结构发生变化而大幅下降。该方法提高了模型的精度,解决了因工况改变、泄漏特征小所造成的误报、漏报等问题。
附图说明
[0042]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例共同用于解释本发明,并不构成对本发明的限制。在附图中:
[0043]
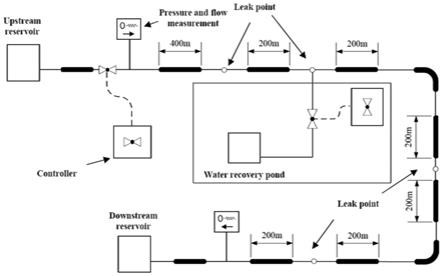
图1是本发明的实验管路设计图,其中,upstream reservoir是上游储水容器,downstreamreservoir是下游储水容器,controller是控制器,pressureandflowmeasurement是压力和流量测量,leakpoint是泄漏点water recovery pond是水回收池。
[0044]
图2是结合卷积神经网络的实时瞬态管道混合模型图。
[0045]
图3是本发明流程图。
[0046]
图4是改变管道入口压力时rttm和cnn
‑
rttm与实际压力对比图。
[0047]
图5是改变管道入口压力与摩擦系数时cnn
‑
rttm与k
‑
cnn
‑
rttm与实际压力对比图。
具体实施方式
[0048]
以下将结合附图及实施例来详细说明本发明的实施方式,借此对本发明如何应用技术手段来解决技术问题,并达成技术效果的实现过程能充分理解并据此实施。
[0049]
如图1~3所示,一种基于知识特征与混合模型融合的管道泄漏检测方法,包括以下步骤:
[0050]
步骤1,建立管道流体实时瞬态管道机理模型。
[0051]
对管道流体运动建立连续性方程、运动动量方程和能量方程:
[0052][0053][0054][0055]
其中,式(1)为流动连续性方程,式(2)为运动动量方程,式(3)为能量方程,式中,p为管道断面平均压力;v为管道断面平均流速;ρ为流体平均密度;f为水力摩阻系数;
ɡ
为重力加速度;θ为流体与水平轴的角度;d为管内径;a为压力波传播速度;t为时间;x为沿管线距离;c
v
为管道中的液体热能;k为地面热导率;t(r)为温度函数;t为液体温度;r为沿管线的某一具体位置距管径中心的径向距离。
[0056]
当流体为液体时,可忽略温度对流体流动的影响,即忽略管道中的能量变化,因此可忽视原方程组式(3)。
[0057]
步骤2,采用特征线法对步骤1中的非线性偏微分方程组进行求解。特征线法需要
设定边界条件及管道初值,因此考虑管道稳态模型,不考虑时间的影响。由式(1)、(2)可得:
[0058][0059][0060]
式(4)和(5)即为管道的稳态模型,是一个常微分方程组,采用四阶龙格库塔法进行求解即可确定实时瞬态管道机理模型的初值。将管道的首末端作为边界条件,设定边界条件输入值为首端压力与末端流量,通过模型计算即可得到管道的首端流量和末端压力。
[0061]
步骤3,建立基于机理与数据驱动的混合模型。其中,机理模型如式(4)和(5)所示,卷积神经网络作为数据驱动模型对机理模型进行修正。卷积神经网络的输入为瞬态管道机理模型的边界条件输入值,即管道运行时的首端压力与末端流量。由于输入为传感器提取的压力和流量的时间序列,采用一维卷积神经网络(1dcnn)对其进行分析计算,1dcnn输出为瞬态管道机理模型与实际测量值之差。
[0062]
步骤4,基于管道基本原理,提取知识特征。
[0063]
通过管道稳态模型式(4)和(5)可得
[0064][0065][0066]
对方程组式(6)和(7)进行积分求解可得管道内等效摩阻系数和管内参数的关系:
[0067][0068][0069]
其中,q1为管道首端流量,q2为管道末端流量,p1为管道首端压力,p2为管道末端压力,为根据首端流量计算所得的等效摩阻系数,为根据末端流量计算所得的等效摩阻系数。
[0070]
步骤5,将步骤4提取的管道知识融合进入1dcnn中,即将1dcnn提取的特征与管道知识结合后再通过全连接层。
[0071]
步骤6,通过步骤5中所建立模型,可以对实时瞬态管道机理模型进行修正,从而得到具有实时性的管道运行数据。当管道泄漏发生时,通过计算后得到管道的首端流量及末端压力,将模型预测值与实际测量值进行比较,当偏差超过给定阈值时,则表明泄漏发生,可表示为:
[0072][0073]
其中,q1为管道首端流量测量值,为首端流量计算值,p2为管道末端压力测量值,为末端压力计算值,σ1、σ2分别为设定的流量和压力阈值。
[0074]
对在不同入口压力情况下的正常流动数据进行预测,在30s时随机改变管道的入口压力,结果如图4,可以看出通过卷积神经网络修正后获得的模型可以更好的对实际情况进行预测。若管道运行时间过长,内部参数发生改变时,原模型对实际过程预测效果不佳,偏差值若超过设定阈值,则会出现误报。因此,对此种情况首先对管道提取知识,即等效摩阻系数,与卷积神经网络flatten层前提取的特征融合,再通过新的全连接层即可对新工况建立准确的管道模型。在管道运行30s时随机改变管道的入口压力与摩阻系数,从图5中可以发现,k
‑
cnn
‑
rttm拥有更好的预测效果。
[0075]
整段管道长为1600m,包含两个弯头,管径为0.05m,管道负压波传播速度为1000m/s,管道中的液体为20℃的水,在管道中设置4个泄漏节点,每个泄漏孔径为1.2mm,泄漏点位是以球阀来控制各节点的泄漏。在8bar至25bar之间随机取样作为管道的入口压力,使用首尾两端的传感器对管道两端压力和流量进行采样,采样时间为30s,采样频率为33hz。因此传感器收集的信息含1001个点,将管道首端压力信号和末端流量信号添加噪声后连接作为一个样本,每个样本共含2002个数据点。将管道末端压力信号及首端流量信号添加噪声后保存作为管道输出的真实测量数据。产生不同压力下正常运行时的样本400组,其中200组管道绝对粗糙度为0.025mm,剩余200组管道绝对粗糙度在0.025mm至0.05mm之间。产生泄漏数据500组,每个泄漏位置取100
‑
200组数据。
[0076]
通过matlab构建实时瞬态管道机理模型,可通过管道首端压力及末端流量计算得到管道的首端流量与末端压力,使用卷积神经网络对机理模型进行修正,采取200组不同压力流量状况下的管道数据进行神经网络训练。建立的卷积神经网络含3层卷积层,每个卷积层后有一个池化层,再通过flatten层与全连接层得到输出。训练后得到训练集准确率为99.5%,测试集准确率为99.2%。
[0077]
当泄漏发生改变时,泄漏信号通过负压波由泄漏点传播到管道首尾两端,选取压力阈值为0.15bar,流量阈值为0.000025m3/s,当混合模型输出值与仿真软件测量值之差超过阈值时,即认为泄漏发生,泄漏判断准确率如表1所示。
[0078]
表1泄漏判断准确率
[0079]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1