容器盖批量拆装设备的制作方法
1.本实用新型涉及加工设备领域,具体地,涉及一种容器盖批量拆装设备。
背景技术:
2.在生产过程中,通常需要对容器进行盖体的拆装工作。专利文献cn209442597u公开了一种自动拆装盖机构,包括升降架、拧盖装置、固定装置,其中:所述拧盖装置设置在所述升降架的上端,用于拆卸和/或拧紧瓶盖,所述升降架能够使所述拧盖装置上下升降;所述固定装置设置在所述升降架的下端,用于固定煤样瓶;所述自动拆装盖机构,既能够拆掉瓶盖,又可以把原来的瓶盖拧上,将拧紧瓶盖和拆卸瓶盖的功能集成到一个机构上面,节省空间,降低设备成本,极大地提高了煤碳样品检测的效率。
3.上述专利文献虽然能够实现生产过程的自动化,但是其结构设计一次只能为一个容器进行拆装作业,在批量生产过程中,需要大量的上述专利文献的设备,成本高昂,难以实现。
技术实现要素:
4.针对现有技术中的缺陷,本实用新型的目的是提供一种容器盖批量拆装设备。
5.根据本实用新型提供的一种容器盖批量拆装设备,包括:升降机构、容器固定机构、容器盖旋转机构和容器喂料机构;
6.所述升降机构驱动所述容器固定机构和所述容器盖旋转机构升降;
7.所述容器固定机构用于固定容器,所述容器盖旋转机构用于在容器固定状态下对容器盖进行拆装;
8.所述容器喂料机构位于所述容器固定机构和所述容器盖旋转机构的下方。
9.优选地,所述容器固定机构包括多个容器固定组件,所述容器固定组件包括:第一压缩板121、第一固定组件120;
10.所述第一固定组件120包括:中心轴126、第一弹性固定件125和第一压缩轴123;
11.所述第一弹性固定件125和所述第一压缩轴123同轴套设在所述中心轴126上,所有第一压缩轴123连接所述第一压缩板121;
12.通过所述第一压缩轴123和所述中心轴126压缩所述第一弹性固定件125,使所述第一弹性固定件125径向膨胀,从而固定位于多个容器固定组件之间的容器的第一部位。
13.优选地,每个所述容器固定组件还包括:第二压缩板111、第二固定组件110;
14.所述第二固定组件110包括:第二弹性固定件114、旋转轴115和第二压缩轴113;
15.所述旋转轴115套设在所述第一压缩轴123上,所述第二弹性固定件114和所述第二压缩轴113同轴套设在所述旋转轴115上,所有所述第二压缩轴113连接所述第二压缩板111;
16.通过所述第二压缩轴113和所述旋转轴115压缩所述第二弹性固定件114,使所述第二弹性固定件114径向膨胀,从而固定位于多个容器固定组件之间的容器的第二部位。
17.优选地,所述容器固定机构还包括:第一压缩电机122,所述第一压缩电机122的输出端与所述第一压缩板121驱动连接,能够驱动所述第一压缩轴123轴向移动;
18.所述容器固定机构还包括:第二压缩电机112,所述第二压缩电机112的输出端与所述第二压缩板111驱动连接,能够驱动所述第二压缩轴113轴向移动。
19.优选地,所述容器盖旋转机构包括:容器盖旋转组件130;
20.所述容器盖旋转组件130包括:旋盖电机131和旋转齿轮组,所述旋盖电机131的输出端通过传动结构驱动所述旋转齿轮组同步旋转;
21.所述旋转齿轮组包括多个旋转齿轮135,部分所述旋转齿轮135的旋转中心与容器盖通过所述容器固定机构连接,通过所述旋盖电机131来驱动容器盖拆装。
22.优选地,所述传动结构包括:同步机构132、旋转蜗杆133和旋转涡轮134;
23.所述旋盖电机131的输出端通过所述同步机构132连接多个所述旋转蜗杆133,使多个所述旋转蜗杆133同步旋转,每个所述旋转蜗杆133与一个或多个所述旋转涡轮134啮合,所述旋转涡轮134啮合在多个所述旋转齿轮135之间。
24.优选地,多个旋转齿轮135在同一平面内相互啮合,部分旋转方向相同的旋转齿轮135与容器盖通过所述容器固定机构连接。
25.优选地,所述容器喂料机构包括:喂料组件140;
26.所述喂料组件140包括:喂料电机141、喂料丝杆142、喂料托盘143、防护闸门144和丝杆螺母145;
27.所述喂料电机141的输出端与所述喂料丝杆142的一端驱动连接,所述丝杆螺母145螺纹连接在所述喂料丝杆142上,所述喂料托盘143连接所述丝杆螺母145;
28.在所述喂料电机141的驱动下,所述喂料托盘143能够沿所述喂料丝杆142的长度方向移动;
29.所述防护闸门144可旋转连接在所述容器喂料机构的壳体上,并位于所述喂料托盘143的移动路线上。
30.优选地,所述喂料组件140还包括:导向轴146和导向轴承147;
31.所述导向轴146与所述喂料丝杆142平行,所述导向轴承147滑动连接在所述导向轴146上,所述喂料托盘143与所述导向轴承147连接。
32.优选地,所述升降机构包括:升降组件100;
33.所述升降组件100包括:安装板101,升降电机102,升降丝杆103,升降导向轴104和上层板105;
34.所述安装板101通过所述升降导向轴104、升降丝杆103连接所述上层板105;
35.所述升降电机102安装在所述上层板105上,且所述升降电机102的输出端与所述升降丝杆103传动连接,所述容器固定机构和所述容器盖旋转机构安装在所述上层板105下侧。
36.与现有技术相比,本实用新型具有如下的有益效果:
37.本实用新型采用同步传动,蜗轮蜗杆传动,丝杆传动相适应配合的技术,解决了在不同空间层次的情况下,环环入扣的完成容器盖的批量拆装作业。
附图说明
38.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
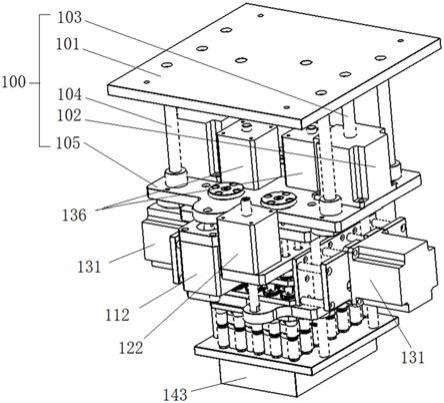
39.图1为本实用新型的整体结构示意图;
40.图2为单个容器固定组件的结构示意图;
41.图3为容器固定组件在未压缩状态下的示意图;
42.图4为容器固定组件在压缩状态下的示意图;
43.图5为容器盖旋转机构的俯视图;
44.图6为容器喂料机构的结构示意图;
45.图7为容器喂料机构的俯视图;
46.图8为容器喂料机构在容器批量作业设备中的结构示意图。
具体实施方式
47.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
48.如图1所示,本实用新型提供的一种容器盖批量拆装设备,包括:升降机构、容器固定机构、容器盖旋转机构和容器喂料机构。升降机构驱动容器固定机构和容器盖旋转机构升降;容器固定机构用于固定容器,容器盖旋转机构用于在容器固定状态下对容器盖进行拆装;容器喂料机构位于容器固定机构和容器盖旋转机构的下方。
49.如图2所示,本实施例提供的一种容器固定机构,包括多个容器固定组件,容器固定组件包括:第一压缩板121、第一固定组件120。
50.第一固定组件120包括:中心轴126、第一弹性固定件125和第一压缩轴123。第一弹性固定件125和第一压缩轴123同轴套设在中心轴126上,所有第一压缩轴123连接第一压缩板121。中心轴126具有第一凸起部,第一压缩轴123具有第二凸起部,第一弹性固定件125位于第一凸起部和第二凸起部之间。
51.如图3和图4所示,在本实施例中,第一压缩轴123通过第一压缩电机122统一驱动,第一压缩电机122的输出端与第一压缩板121驱动连接,能够同时驱动所有第一压缩轴123轴向移动。统一驱动的方式包括将第一压缩轴123统一连接在第一压缩板121上,通过第一压缩电机122来驱动第一压缩板121。
52.本实施例的容器固定机构通过第一压缩轴123和中心轴126压缩第一弹性固定件125,使第一弹性固定件125径向膨胀,从而固定位于多个容器固定组件之间的容器200的第一部位。在本实施例中,第一部位可以是容器200的主体部分如瓶身。
53.上述的第一凸起部位于中心轴126的一端,所有中心轴126的另一端连接在上层板105上,第二凸起部之间位于第一压缩轴123的一端。凸起部可以是与端部一体成型的结构,本实用新型对此不作限制。上层板105连接驱动设备,通过驱动设备驱动所有容器固定组件统一移动,以便于作业前后的容器进行上下料以及其他作业处理例如向容器内进行灌装或者抽吸。
54.容器固定机构还包括:第二压缩板111、第二固定组件110。
55.第二固定组件110包括:旋转轴115、第二弹性固定件114和第二压缩轴113。旋转轴115套设在第一压缩轴123上,第二弹性固定件114和第二压缩轴113同轴套设在旋转轴115上,所有第二压缩轴113连接第二压缩板111,旋转轴115具有第三凸起部,第二压缩轴113具有第四凸起部,第二弹性固定件114位于第三凸起部和第四凸起部之间。
56.在本实施例中,第二压缩轴113通过第二压缩电机112统一驱动,第二压缩电机112的输出端与第二压缩板111驱动连接,能够同时驱动所有第二压缩轴113轴向移动。统一驱动的方式包括将第二压缩轴113统一连接在第一压缩板121上,通过第一压缩电机122来驱动第一压缩板121。
57.如图3和图4所示,本实施例通过第二压缩轴113和旋转轴115压缩第二弹性固定件114,使第二弹性固定件114径向膨胀,从而固定位于多个容器固定组件之间的容器200的第二部位。在本实施例中,第二部位可以是容器200的盖体部分,从而实现容器200两个部位的共同固定。
58.在本实施例中,第二压缩轴113通过第二压缩电机112统一驱动,第二压缩电机112的输出端与第二压缩板111驱动连接,将第二压缩轴113统一连接在第二压缩板111上,通过第二压缩电机112来驱动第二压缩板111。在其他实施例中,旋转轴115可以通过电机驱动,从而带动第二弹性固定件114旋转,利用第二弹性固定件114夹紧盖体后的旋转产生的摩擦力,可以驱动容器的盖体同步旋转,实现容器盖体的批量拆装。
59.在本实用新型中,第一弹性固定件125和第二弹性固定件114可以采用橡胶等具有一定恢复形变能力且具有一定硬度的材料,本实用新型对此不做限制。
60.采用多个容器固定组件的组合,利用压缩使弹性固定件膨胀,从而固定多个容器固定组件之间的容器。同一个容器固定组件在周向可以分别与多个其他容器固定组件配合,从而实现容器的批量固定操作。在此基础上,可以进一步实现对批量容器的其他作业工作。
61.如图5所示,本实用新型提供的一种容器盖旋转机构,包括:容器盖旋转组件130。容器盖旋转组件130包括:旋盖电机131和旋转齿轮组,旋盖电机131的输出端通过传动结构驱动旋转齿轮组同步旋转。旋转齿轮组包括多个旋转齿轮135,部分旋转齿轮135的旋转中心与容器盖驱动连接,通过旋盖电机131来驱动容器盖拆装。
62.在本实用新型中,传动结构包括:同步机构132、旋转蜗杆133和旋转涡轮134。旋盖电机131的输出端通过同步机构132连接多个旋转蜗杆133,使多个旋转蜗杆133同步旋转,每个旋转蜗杆133与一个或多个旋转涡轮134啮合,旋转涡轮134啮合在多个旋转齿轮135之间。多个旋转齿轮135在同一平面内相互啮合,部分旋转方向相同的旋转齿轮135与容器盖驱动连接。
63.如图1所示,容器盖旋转机构还可以包括旋盖升降电机136,与其他电机类似,旋盖升降电机136的输出端驱动连接一个旋盖升降板,该旋盖升降板与所有旋转轴115连接,可进驱动旋转轴115升降,从而实现拆卸容器盖后将容器盖提起,以便于后续作业。
64.在本实用新型中,与容器盖驱动连接的方式包括:旋转齿轮135的旋转中心通过容器固定机构与容器盖驱动连接,具体的,旋转齿轮135的旋转中心与旋转轴115连接,从而带动旋转轴115旋转。同步机构132可通过多种方式实现旋转蜗杆133和旋盖电机131的运动传
递功能,如皮带传动,齿轮传动,钢链传动等。
65.旋转机构可以批量对容器盖进行拆装工作,提升了工作效率的同时还兼备设备结构简单、成本低廉的优点。
66.如图6、图7所示,本实用新型提供的一种容器喂料机构,包括:喂料组件140。喂料组件140主要包括:喂料电机141、喂料丝杆142、喂料托盘143、防护闸门144和丝杆螺母145。喂料电机141的输出端与喂料丝杆142的一端驱动连接,丝杆螺母145螺纹连接在喂料丝杆142上,喂料托盘143连接丝杆螺母145。喂料托盘143用于放置多个容器,为了便于作业设备操作,可以将喂料托盘143设计为网格或者多个呈阵列排列的立柱结构,从而使放置于其中的容器能够实现整齐的排列,以便于批量作业。喂料电机141连接在电气安装板149上,以便于固定。
67.壳体上开设有喂料托盘143的进出口,防护闸门144安装在进出口位置。在喂料电机141的驱动下,喂料托盘143能够沿喂料丝杆142的长度方向移动,防护闸门144可旋转连接在容器喂料机构的壳体上,并位于喂料托盘143的移动路线上。较佳的,防护闸门144通过扭簧连接在壳体上,在自然状态下保持闭合,并通过喂料托盘143的抵触打开。或者,防护闸门144通过电子驱动装置连接在壳体上,通过软件控制开关。
68.为了保证喂料托盘143在移动过程中的平稳,本实用新型还设计了导向轴146和导向轴承147。导向轴146与喂料丝杆142平行,导向轴承147滑动连接在导向轴146上,喂料托盘143与导向轴承147连接。导向轴146和导向轴承147的数量为两对,分别位于所述喂料托盘143的两侧。
69.考虑到放置了容器的喂料托盘143重量较大,且作业设备在操作时会有下压的动作,有可能导致喂料组件140的损坏,因此,本实用新型还设计了支撑板148,支撑板148滑动、滚动支撑在喂料托盘143的底面。支撑板148的数量为两个,分别位于所述喂料丝杆142的两侧。
70.如图8所示,上述容器喂料机构在容器批量作业设备之中的位置,形成一体化结构。通过喂料托盘将批量的容器往返运输于作业设备内外,为拆装容器盖做准备。同时防护闸门可以很好的起到保护作业设备内部结构,防止外部异物进入。
71.如图1所示,升降机构包括:升降组件100。升降组件100包括:安装板101,升降电机102,升降丝杆103,升降导向轴104和上层板105。安装板101通过升降导向轴104、升降丝杆103连接上层板105,升降电机102安装在上层板105上,且升降电机102的输出端与升降丝杆103传动连接,容器固定机构和容器盖旋转机构安装在上层板105下侧。
72.本实用新型的流程如下:
73.在初始状态下,升降机构将容器固定机构和容器盖旋转机构提升在高位,此时,容器喂料机构可将喂料托盘143伸出,即可从外部获取批量的容器。获取容器之后,容器喂料机构将喂料托盘143收回设备内部。
74.随后,升降机构将容器固定机构和容器盖旋转机构向下驱动,使喂料托盘143上的容器分别进入前述的容器固定组件之间。第一压缩电机122驱动第一压缩板121下压,从而固定住容器的瓶身,第二压缩电机112驱动第二压缩板111下压,从而固定住容器瓶盖。
75.固定完成后,旋盖电机131即可驱动旋转轴115旋转,旋转轴115旋转的旋转带动第二弹性固定件114旋转,利用第二弹性固定件114夹紧盖体后的旋转产生的摩擦力,可以驱
动容器的盖体同步旋转,实现容器盖的批量拆卸。此时,旋盖升降电机136驱动旋转轴115提升,从而实现拆卸容器盖后将容器盖提起(容器盖仍处于被夹紧状态)。如此,即可对拆卸后的容器进行进一步的批量作业,如灌装、抽取等等。
76.完成作业后,旋盖升降电机136驱动旋转轴115下降,再旋转旋转轴115将容器盖安装回容器主体上。此时容器固定机构即可松开对容器主体、容器盖的固定,随后升降机构提升,容器喂料机构将喂料托盘143伸出设备外部。
77.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
78.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1