一种实现加油岛双面作业的机械臂加油机器人悬挂式平台的制作方法
1.本实用新型涉及加油机器人技术领域,具体涉及一种实现加油岛双面作业的机械臂加油机器人悬挂式平台。
背景技术:
2.在人工智能日渐发展的推动下,加油机器人的研究和开发方兴未艾。加油站是具有一定安全风险的作业场合。特别的,在偏远边疆地区,或高海拔高纬度的低温地区,或深夜以及极端环境条件(包括疫情)下的常规加油站中,使用加油机器人取代人工,实现无感无接触的作业,具有很大的经济和社会价值。
3.加油机器人的执行机构一般是依托六关节协作机械臂设计而来的。六轴机械臂,因其自身固有的性质,在空间中能够达到的点集是一个去心的球形空间。该空间的大小取决于机械臂关节的尺寸以及允许旋转的角度范围。一般的,关节越长,机械臂能到达的点就越远,去心球形的内外半径以及内外半径之差也变大,意味着更大范围的工作空间。在汽车停驻到加油位置进行加油时,最终停驻的位置前后、左右和倾斜的情况都是随机变化的,因此为了应对不同位置上的对象车辆,加油机器人机械臂的工作空间必须能够覆盖汽车可能停驻的所有位置。例如,对于双加油岛加油的情况,由于加油机器人位于两个平行间隔设置的加油通道之间的位置,其需要负担前后两个加油通道上的车辆加油,这就需要加油机器人整体上具备较大的工作回旋空间,导致机械臂的尺寸必须变得很大,从而不利于加油过程的安全和产品的成本控制。
技术实现要素:
4.为了解决上述问题,本实用新型提出一种实现加油岛双面作业的机械臂加油机器人悬挂式平台,旨在扩大加油机器人机械臂的工作空间范围,并提高加油作业的安全性。具体的技术方案如下:
5.一种实现加油岛双面作业的机械臂加油机器人悬挂式平台,包括顶板、固定在所述顶板下端的横向直线导轨、移动设置在所述横向直线导轨上的横向基座、固定在所述横向基座下端的纵向直线导轨、移动设置在所述纵向直线导轨上的纵向基座、向下竖立设置在所述纵向基座上的伸缩组件、连接在所述伸缩组件的伸缩杆下端的轴承基座、转动设置在所述轴承基座上用于固定关节机械手的回转基座。
6.优选的,所述伸缩组件为伺服电动推杆或气缸。
7.优选的,所述伸缩组件的数量为2~4个。
8.当高度比较高的车型成为加油作业对象时,伺服电动推杆收缩,提升安装在下面关节机械手的高度。反之,当高度比较低的车型成为加油作业对象时,伺服电动推杆伸长,可以降低关节机械手的高度。
9.为了控制伸缩组件的伸缩移动的距离,在所述纵向基座上设置有用于检测所述纵向基座与所述轴承基座之间距离的红外测距探头。
10.为了通过视觉识别系统精确地判断加油车辆上油箱盖的位置,进一步的改进方案是:在所述横向基座的前后侧位置分别设置有用于识别车辆加油口位置的数码相机。
11.为了进一步提高加油作业的安全性,在所述横向基座的左右两侧还分别延伸连接有支架,所述支架上设置有用于监测下方是否有障碍物、动物或人闯入以影响机械臂加油机器人动作的安全装置,所述安全装置包括分别设置在所述支架的左右延伸端位置的纵向安装杆、设置在所述纵向安装杆上用于监测下方是否有障碍物、动物或人闯入的红外测距传感器阵列。
12.由于红外测距传感器阵列安装在横向基座的左右两侧,因此当横向基座左右移动时,位于纵向安装杆上的红外测距传感器阵列能够动态监测加油机器人左右两侧的活动障碍物情况,具体是通过红外测距传感器阵列中的各个红外测距传感器测量距离地面的距离来进行判断,当红外测距传感器测得的距离地面的距离异常时,加油机器人停止动作并发出报警,从而保证加油作业过程的安全。
13.本实用新型中,所述回转基座的回转角度至少为180度,从而使得加油机器人能够实现双岛加油作业。
14.本实用新型中,所述关节机械手包括与所述回转基座相连接的固定座、转动设置在所述固定座上的第一机械臂、转动设置在所述第一机械臂前端的第二机械臂,设置在所述第二机械臂前端且带有三个转动自由度的三向转动腕关节,所述三向转动腕关节的前端设置有用于装夹加油枪的油枪夹头。
15.本实用新型中,所述横向基座和纵向基座分别通过伺服驱动元件实现沿导轨方向的移动。
16.本实用新型中,所述伺服驱动元件包括伺服电机,所述伺服电机通过丝杆传动机构驱动所述横向基座或纵向基座沿导轨方向的移动。
17.本实用新型中,所述顶板固定在立柱上。
18.本实用新型的有益效果是:
19.第一,本实用新型的一种实现加油岛双面作业的机械臂加油机器人悬挂式平台,平台采用悬挂式结构,能够实现较大范围的横向、纵向移动,并能够实现高度方向的调整,从而使得加油机器人机械臂即使采用规格较小的关节机械臂也能够实现更大范围工作空间的加油作业,并降低了加油机器人机械臂的成本。
20.第二,本实用新型的一种实现加油岛双面作业的机械臂加油机器人悬挂式平台,横向基座的左右两侧分别设置有红外测距传感器阵列,从而在横向基座移动时能够动态监测加油机器人左右两侧的活动障碍物情况,提高了加油作业过程的安全性。
附图说明
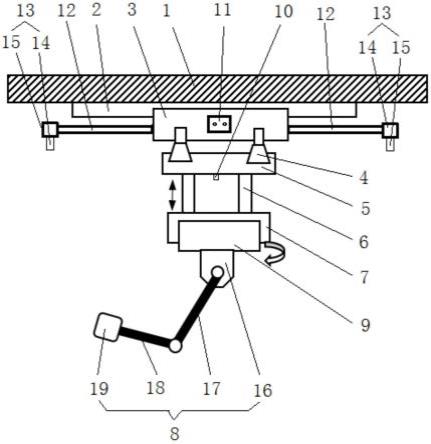
21.图1是本实用新型的一种实现加油岛双面作业的机械臂加油机器人悬挂式平台的结构示意图。
22.图中:1、顶板,2、横向直线导轨,3、横向基座,4、纵向直线导轨,5、纵向基座,6、伸缩组件,7、轴承基座,8、关节机械手,9、回转基座,10、红外测距探头,11、数码相机,12、支架,13、安全装置,14、纵向安装杆,15、红外测距传感器阵列,16、固定座,17、第一机械臂,18、第二机械臂,19、三向转动腕关节。
具体实施方式
23.下面结合附图和实施例,对本实用新型的具体实施方式作进一步描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
24.实施例1:
25.如图1所示为本实用新型的一种实现加油岛双面作业的机械臂加油机器人悬挂式平台的实施例,包括顶板1、固定在所述顶板1下端的横向直线导轨2、移动设置在所述横向直线导轨2上的横向基座3、固定在所述横向基座3下端的纵向直线导轨4、移动设置在所述纵向直线导轨4上的纵向基座5、向下竖立设置在所述纵向基座5上的伸缩组件6、连接在所述伸缩组件6的伸缩杆下端的轴承基座7、转动设置在所述轴承基座7上用于固定关节机械手8的回转基座9。
26.优选的,所述伸缩组件6为伺服电动推杆或气缸。
27.优选的,所述伸缩组件6的数量为2~4个。
28.当高度比较高的车型成为加油作业对象时,伺服电动推杆收缩,提升安装在下面关节机械手8的高度。反之,当高度比较低的车型成为加油作业对象时,伺服电动推杆伸长,可以降低关节机械手8的高度。
29.为了控制伸缩组件6的伸缩移动的距离,在所述纵向基座5上设置有用于检测所述纵向基座5与所述轴承基座7之间距离的红外测距探头10。
30.为了通过视觉识别系统精确地判断加油车辆上油箱盖的位置,进一步的改进方案是:在所述横向基座3的前后侧位置分别设置有用于识别车辆加油口位置的数码相机11。
31.为了进一步提高加油作业的安全性,在所述横向基座3的左右两侧还分别延伸连接有支架12,所述支架12上设置有用于监测下方是否有障碍物、动物或人闯入以影响机械臂加油机器人动作的安全装置13,所述安全装置13包括分别设置在所述支架12的左右延伸端位置的纵向安装杆14、设置在所述纵向安装杆14上用于监测下方是否有障碍物、动物或人闯入的红外测距传感器阵列15。
32.由于红外测距传感器阵列15安装在横向基座3的左右两侧,因此当横向基座3左右移动时,位于纵向安装杆14上的红外测距传感器阵列15能够动态监测加油机器人左右两侧的活动障碍物情况,具体是通过红外测距传感器阵列15中的各个红外测距传感器测量距离地面的距离来进行判断,当红外测距传感器测得的距离地面的距离异常时,加油机器人停止动作并发出报警,从而保证加油作业过程的安全。
33.本实施例中,所述回转基座9的回转角度至少为180度,从而使得加油机器人能够实现双岛加油作业。
34.本实施例中,所述关节机械手8包括与所述回转基座9相连接的固定座16、转动设置在所述固定座16上的第一机械臂17、转动设置在所述第一机械臂17前端的第二机械臂18,设置在所述第二机械臂18前端且带有三个转动自由度的三向转动腕关节19,所述三向转动腕关节19的前端设置有用于装夹加油枪的油枪夹头。
35.本实施例中,所述横向基座3和纵向基座5分别通过伺服驱动元件实现沿导轨方向的移动。
36.本实施例中,所述伺服驱动元件包括伺服电机,所述伺服电机通过丝杆传动机构
驱动所述横向基座3或纵向基座5沿导轨方向的移动。
37.本实施例中,所述顶板1为水平顶板,其固定在立柱上。
38.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1