强激光脉冲与高能电子对撞的三维立体探测的处理方法与流程
1.本申请涉及电子学领域,具体而言,涉及一种强激光脉冲与高能电子对撞的三维立体探测的处理方法。
背景技术:
2.电子学是一门研究电子的特性、行为以及电子器件的物理学科。它是以电子运动和电磁波及其相互作用的研究和利用为核心而发展起来的。
3.众所周知,电子绕核做高速无规则运动(常温条件下,金属导体内电子热运动速率高达10万米/秒),人们所描绘的的核外电子轨道图,如常说的球型、哑铃型等,也只是通过大量数据统计,得到某一能级电子出现概率最大的位置范围。由于高速运动的电子轨迹难以控制,想要仔细观察并且研究电子的特性,就必须要能捕捉到高速运动且出现位置具有随机性的电子。在实验上人们已经可以通过合成截止频率附近的几个谐波来产生脉冲长度在阿秒量级的激光脉冲(1阿秒=10-18s)。阿秒脉冲的获得开启了超快科学一个全新的领域:人们可以在电子运动的自然时间尺度上去探测和操控原子分子内部电子的运动,这是继飞秒科学后人们操控微观世界物质运动的又一大飞跃。
4.最近十年来,啁啾脉冲放大(cpa)技术的应用,使激光脉冲的峰值强度提高了5—6个数量级,脉宽短至几十飞秒。将一束超强超短激光脉冲聚焦在很小的空间范围内,激光强度高于10
19
wμm2/cm2,其电场可以大于10
12
v/m。如此强大的电场激发了人们使用超强超短激光脉冲控制电子的想法,提出了很多激光脉冲在真空和等离子体内加速电子的模型。
5.目前业内对强激光脉冲与高能电子对撞的三维立体探测进行三维立体全方位的分析和研究还不够,主要困难在于理论推导基于matlab编程的强激光脉冲与高能电子对撞的三维立体探测的非线性全时间运动方程、能量方程以及如何应用有限元方法正确的求解maxwell方程、拉各朗日方程和全时间电子的运动方程、能量方程。同时,实际实验对于环境设备要求较高。
6.针对相关技术中无法立体探测强激光脉冲与高能电子对撞,并将其运用于实际实验过程中的问题,目前尚未提出有效的解决方案。
技术实现要素:
7.本申请的主要目的在于提供一种强激光脉冲与高能电子对撞的三维立体探测的处理方法,以解决相关技术中无法立体探测强激光脉冲与高能电子对撞,并将其运用于实际实验过程中的问题。
8.为了实现上述目的,根据本申请的一个方面,提供了一种强激光脉冲与高能电子对撞的三维立体探测的处理方法。
9.根据本申请的强激光脉冲与高能电子对撞的三维立体探测的处理方法包括:
10.采用matlab三维编程模拟方法通过跟踪每个电子在电磁场中的运动,模拟高能电子全空间运动轨迹,用于处理激光脉冲与高能电子相互作用过程的非线性过程,
11.其中,所述强激光脉冲与高能电子对撞的三维立体探测的理论和数值模拟依据,基于matlab编程的强激光脉冲与高能电子对撞的三维立体探测的全时间和全空间特性的获得。
12.进一步地,所述强激光脉冲与高能电子对撞的三维立体探测的理论和数值模拟依据,获取的方法包括:
13.利用圆偏振激光脉冲对电子加速的原理,精确求解电子运动的相对论方程及激光的电磁理论的方程,得到高能电子运动轨迹的全空间方程和能量增益方程。
14.进一步地,所述强激光脉冲与高能电子对撞的三维立体探测的理论和数值模拟依据,获取的方法包括:
15.应用有限元方法正确的求解maxwell方程、拉各朗日方程和全时间电子的运动方程,能量增益方程和所述高能电子运动轨迹的全空间方程。
16.进一步地,采用matlab三维编程模拟方法通过跟踪每个电子在电磁场中的运动,模拟高能电子全空间运动轨迹,处理激光脉冲与高能电子相互作用过程的非线性过程,包括:
17.在理论的基础上建立单电子模型,强激光脉冲与高能电子对撞的过程中不同激光束腰半径、不同电子初始速度对电子运动轨迹的影响,
18.通过改变束腰半径和电子初速度的参数,得出大量的电子运动轨迹图形及能量谱图形,通过对图形变化趋势及参量的分析得出束腰半径和电子初速度对电子运动轨迹和能量产生的影响,
19.其中所述参量至少包括:螺旋运动半径,中心点位置,能量值。
20.进一步地,包括:
21.研制三维相对论matlab程序,采用9点微分算子法以提高数值精度,并采用近似矩阵因子分解法来降低存储量和计算量。
22.进一步地,包括:
23.通过获得的基于matlab编程的强激光脉冲与高能电子对撞的三维立体探测的全时间和全空间特性,为实验上进行全时间和全空间基于matlab编程的强激光脉冲与高能电子对撞的三维立体探测提供理论和数值模拟依据。
24.进一步地,包括:
25.采用控制变量法,分别改变激光束腰半径和电子初速度得到大量的电子运动轨迹图形。
26.进一步地,采用控制变量法,分别改变激光束腰半径和电子初速度得到大量的电子运动轨迹图形时,还包括:
27.在同一电子初速度条件下,当所述激光束腰半径大于15并逐渐增大时,电子运动轨迹逐渐趋于稳定。
28.进一步地,采用控制变量法,分别改变激光束腰半径和电子初速度得到大量的电子运动轨迹图形时,还包括:
29.在所述电子初速度与激光场方向相反时,电子运动轨迹波动小且较为集中,
30.在同一所述激光束腰半径的条件下,随着电子反向初速度的增加,达到如下临界状态:
31.当自身速度uz0=-0.80c时,电子螺旋运动的起始位置与终止位置重合;
32.当自身速度uz0=-0.86c时,出现单电子耦合现象;
33.当自身速度uz0=-0.90c时,耦合现象消失,电子将一直沿初速度方向运动。
34.其中c为光速。
35.进一步地,包括:
36.通过改变激光脉冲的束腰半径和电子的初速度,用以控制电子运动轨迹。
37.在本申请实施例中强激光脉冲与高能电子对撞的三维立体探测的处理方法,采用matlab三维编程模拟方法通过跟踪每个电子在电磁场中的运动,模拟高能电子全空间运动轨迹,用于处理激光脉冲与高能电子相互作用过程的非线性过程,达到了通过获得的基于matlab编程的强激光脉冲与高能电子对撞的三维立体探测的全时间和全空间特性,为实验上进行全时间和全空间的强激光脉冲与高能电子对撞的三维立体探测提供理论和数值模拟依据的目的,从而实现了通过编写matlab程序来研究强激光脉冲与高能电子的对撞特性,在实际探测中具有重要的意义和较好的应用前景的技术效果,进而解决了相关技术中无法立体探测强激光脉冲与高能电子对撞,并将其运用于实际实验过程中的技术问题。
附图说明
38.构成本申请的一部分的附图用来提供对本申请的进一步理解,使得本申请的其它特征、目的和优点变得更明显。本申请的示意性实施例附图及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中:
39.图1是束腰半径变化的激光脉冲与电子相互作用的示意图;
40.图2是电子与激光脉冲对撞相互作用的示意图;
41.图3是当控制u
z0
=0时电子的轨迹图像示意图;
42.图4是当控制uz0=0.5c时电子的轨迹图像示意图;
43.图5是当控制u
z0
=-0.5c时电子的轨迹图像示意图;
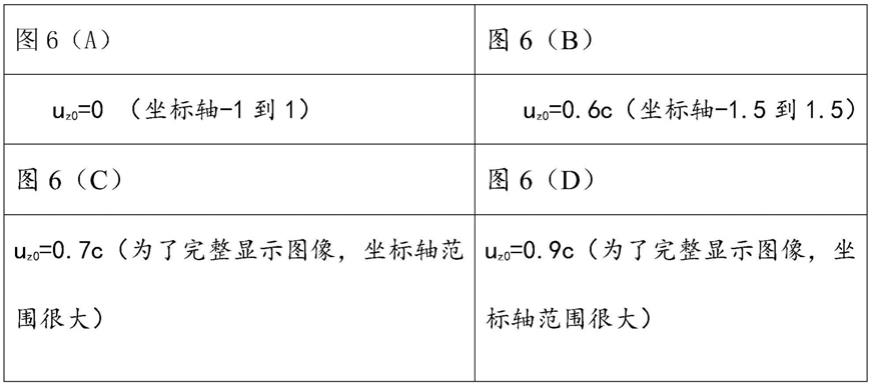
44.图6(a)-6(d)是uz0在-0.99c~0.99c的范围内电子的部分轨迹图像示意图之一;
45.图7(a)-7(o)是uz0在-0.99c~0.99c的范围内电子的部分轨迹图像示意图之二。
具体实施方式
46.为了使本技术领域的人员更好地理解本申请方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分的实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
47.需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
48.在本申请中,术语“上”、“下”、“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”、“中”、“竖直”、“水平”、“横向”、“纵向”等指示的方位或位置关系为基于附图所示的方位或位置关系。这些术语主要是为了更好地描述本申请及其实施例,并非用于限定所指示的装置、元件或组成部分必须具有特定方位,或以特定方位进行构造和操作。
49.并且,上述部分术语除了可以用于表示方位或位置关系以外,还可能用于表示其他含义,例如术语“上”在某些情况下也可能用于表示某种依附关系或连接关系。对于本领域普通技术人员而言,可以根据具体情况理解这些术语在本申请中的具体含义。
50.此外,术语“安装”、“设置”、“设有”、“连接”、“相连”、“套接”应做广义理解。例如,可以是固定连接,可拆卸连接,或整体式构造;可以是机械连接,或电连接;可以是直接相连,或者是通过中间媒介间接相连,又或者是两个装置、元件或组成部分之间内部的连通。对于本领域普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。
51.需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
52.该方法包括如下的步骤:
53.采用matlab三维编程模拟方法通过跟踪每个电子在电磁场中的运动,模拟高能电子全空间运动轨迹,用于处理激光脉冲与高能电子相互作用过程的非线性过程,
54.所述强激光脉冲与高能电子对撞的三维立体探测的理论和数值模拟依据,基于matlab编程的强激光脉冲与高能电子对撞的三维立体探测的全时间和全空间特性的获得。
55.在本申请的实施例中对于强激光脉冲与高能电子对撞的三维立体探测,采用理论分析和matlab数值模拟手段进行研究。
56.具体地,在理论研究中主要包括:推导强激光脉冲与高能电子对撞的三维立体探测的全时间运动方程、能量方程以及高能电子的全空间运动方程。
57.具体地,数值模拟研究主要包括:用matlab软件三维立体编程模拟高能电子全空间运动轨迹。
58.需要注意的是,matlab三维编程模拟方法通过跟踪每个电子在电磁场中的运动,特别适用于研究激光脉冲与高能电子相互作用过程的非线性过程,是目前超短脉冲激光与高能电子相互作用首选的、主要的数值研究工具,而matlab 三维立体编程模拟方法也是研究高能电子的全时间和全空间运动轨迹的主流方法。
59.优选地,采用大型计算机去求解以前不可能求解的理论问题,可采用“9 点微分算子法”以提高数值精度,用“近似矩阵因子分解法”来降低存储量和计算量,并可对大量数据进行分析和修正,为实验研究提供理论依据,从而为大型数据的运算以及大型数据的存储提供了一种有效的解决方法。
60.从以上的描述中,可以看出,本申请实现了如下技术效果:
61.在本申请实施例中强激光脉冲与高能电子对撞的三维立体探测的处理方法,采用matlab三维编程模拟方法通过跟踪每个电子在电磁场中的运动,模拟高能电子全空间运动轨迹,用于处理激光脉冲与高能电子相互作用过程的非线性过程,达到了通过获得的基于matlab编程的强激光脉冲与高能电子对撞的三维立体探测的全时间和全空间特性,为实验上进行全时间和全空间的强激光脉冲与高能电子对撞的三维立体探测提供理论和数值模拟依据的目的,从而实现了通过编写matlab程序来研究强激光脉冲与高能电子的对撞特
性,在实际探测中具有重要的意义和较好的应用前景的技术效果,进而解决了相关技术中无法立体探测强激光脉冲与高能电子对撞,并将其运用于实际实验过程中的技术问题。
62.根据本申请实施例,作为本实施例中的优选,所述强激光脉冲与高能电子对撞的三维立体探测的理论和数值模拟依据,获取的方法包括:
63.利用圆偏振激光脉冲对电子加速的原理,精确求解电子运动的相对论方程及激光的电磁理论的方程,得到高能电子运动轨迹的全空间方程和能量增益方程。
64.具体地,利用圆偏振激光脉冲对电子加速的原理,精确求解电子运动的相对论方程及激光的电磁理论的方程,得到电子的运动轨迹方程和能量增益方程。
65.根据本申请实施例,作为本实施例中的优选,所述强激光脉冲与高能电子对撞的三维立体探测的理论和数值模拟依据,获取的方法包括:
66.应用有限元方法正确的求解maxwell方程、拉各朗日方程和全时间电子的运动方程,能量增益方程和所述高能电子运动轨迹的全空间方程。
67.具体地,应用有限元方法正确的求解maxwell方程、拉各朗日方程和全时间电子的运动方程,能量方程以及高能电子运动轨迹的全空间方程,在理论的基础上建立单电子模型,研究了圆偏振激光脉冲与电子相互作用过程中不同激光束腰半径、不同电子初始速度对电子运动轨迹的影响。
68.在上述是实施例中采用三维相对论matlab数值模拟方法,时时跟踪高能电子的运动,直接从maxwell方程和newton方程出发,不引入任何近似,研究基于matlab编程的强激光脉冲与高能电子对撞的三维立体探测,揭示强激光脉冲与高能电子对撞的三维立体探测的物理机制;通过获得的基于matlab 编程的强激光脉冲与高能电子对撞的三维立体探测的全时间和全空间特性,为实验上进行全时间和全空间的强激光脉冲与高能电子对撞的三维立体探测提供理论和数值模拟依据。
69.根据本申请实施例,作为本实施例中的优选,采用matlab三维编程模拟方法通过跟踪每个电子在电磁场中的运动,模拟高能电子全空间运动轨迹,处理激光脉冲与高能电子相互作用过程的非线性过程,包括:
70.在理论的基础上建立单电子模型,强激光脉冲与高能电子对撞的过程中不同激光束腰半径、不同电子初始速度对电子运动轨迹的影响,
71.通过改变束腰半径和电子初速度的参数,得出大量的电子运动轨迹图形及能量谱图形,通过对图形变化趋势及参量的分析得出束腰半径和电子初速度对电子运动轨迹和能量产生的影响,
72.其中所述参量至少包括:螺旋运动半径,中心点位置,能量值。
73.具体地,精确求解电子运动的相对论方程及激光的电磁理论的方程,得到了电子的运动轨迹方程和能量增益方程,根据得到的电子的相对论运动方程,得出电子运动轨迹和能量的表达式,通过改变束腰半径和电子初速度的参数,得出大量的电子运动轨迹图形及能量谱图形,通过对图形变化趋势及参量(螺旋运动半径,中心点位置,能量值)的分析得出了束腰半径和电子初速度对电子运动轨迹和能量产生的影响。
74.根据本申请实施例,作为本实施例中的优选,包括:
75.研制三维相对论matlab程序,采用9点微分算子法以提高数值精度,并采用近似矩阵因子分解法来降低存储量和计算量。
76.具体地,通过研发三维相对论matlab程序,这一程序在研究强激光与物质相互作用中有着重要的应用,是研究强激光与物质相互作用的一项必不可少的基础性工作。该程序中拟采用“9点微分算子法”以提高数值精度,用“近似矩阵因子分解法”来降低存储量和计算量。
77.根据本申请实施例,作为本实施例中的优选,包括:
78.通过获得的基于matlab编程的强激光脉冲与高能电子对撞的三维立体探测的全时间和全空间特性,为实验上进行全时间和全空间基于matlab编程的强激光脉冲与高能电子对撞的三维立体探测提供理论和数值模拟依据。
79.根据本申请实施例,作为本实施例中的优选,包括:
80.采用控制变量法,分别改变激光束腰半径和电子初速度得到大量的电子运动轨迹图形。
81.具体地,当束腰半径在1到15之间时,电子运动的轨迹较为分散,并且束腰半径的微小变化都会引起电子运动轨迹的很大变化,这样的束腰半径并不能实现对电子运动情况的稳定控制。
82.当束腰半径大于15并逐渐增大时,电子运动轨迹逐渐稳定,这是由于激光较为分散,聚焦程度不高,对电子的加速能力减弱,但这样恰恰使得电子运动轨迹能够得到很好的控制。
83.根据本申请实施例,作为本实施例中的优选,采用控制变量法,分别改变激光束腰半径和电子初速度得到大量的电子运动轨迹图形时,还包括:
84.在同一电子初速度条件下,当所述激光束腰半径大于15并逐渐增大时,电子运动轨迹逐渐趋于稳定。
85.根据本申请实施例,作为本实施例中的优选,采用控制变量法,分别改变激光束腰半径和电子初速度得到大量的电子运动轨迹图形时,还包括:
86.在所述电子初速度与激光场方向相反时,电子运动轨迹波动小且较为集中,
87.在同一所述激光束腰半径的条件下,随着电子反向初速度的增加,达到如下临界状态:
88.当自身速度uz0=-0.80c时,电子螺旋运动的起始位置与终止位置重合;
89.当自身速度uz0=-0.86c时,出现单电子耦合现象;
90.当自身速度uz0=-0.90c时,耦合现象消失,电子将一直沿初速度方向运动。
91.其中c为光速。
92.具体地,综上可见,在电子初速度与激光场方向相反时,电子运动轨迹波动小,较为集中,因此这种情况下电子运动较好控制。在同一激光束腰半径的条件下,随着电子反向初速度的增加,会达到临界状态:当uz0=-0.80c时,电子螺旋运动的起始位置与终止位置重合;当uz0=-0.86c时,出现单电子耦合现象;当uz0=-0.90c时,耦合现象消失,电子将一直沿初速度方向运动。
93.通过改变激光脉冲的束腰半径和电子的初速度,电子运动轨迹得以控制。根据该理论成果,可以用紫外激光器发出光束,在空气中电离出一条通道,使电流导向目标,从而将防身用的电击器和短波段高功率激光器结合,制作出一种致僵武器。
94.优选地,可以用激光脉冲来控制电子运动,使电子在荧光屏上成像,制成高精度激
光图像控制仪。
95.优选地,激光束和电子“追击”时,当电子初速度大于一定范围,电子轨迹将大幅度偏移中心轴线,在科研领域中,可以由此对不同初速度的电子进行筛选,制成新型的速度选择器。
96.优选地,在单电子耦合的情况下,可以增加观测次数,其他应用有待进一步研究。
97.根据本申请实施例,作为本实施例中的优选,包括:
98.通过改变激光脉冲的束腰半径和电子的初速度,用以控制电子运动轨迹。
99.本申请的实现原理如下:
100.(一)理论模型
101.如图1所示,是束腰半径变化的激光脉冲与电子相互作用的示意图。激光脉冲从左向右传播,一个静止的电子位于脉冲焦点附近的激光传播轴上。当激光遇到电子时,脉冲上升沿的有质动力把电子向右推,这个过程在靠近焦点的区域进行,因而激光的强度很大,对电子的加速作用也很明显。当脉冲的上升沿越过电子脉冲的下降沿开始减速电子时,脉冲和电子都已经远离焦点,激光强度也明显减小,因此减速作用也比较小。加速和减速作用的不对称,使得激光脉冲和电子分离以后,电子获得了能量增益,同时可以控制电子的运动。
102.如图2所示,是电子与激光脉冲对撞相互作用的示意图。假设激光脉冲沿 +z轴传播,相对论电子沿-z轴与激光脉冲相向运动。
103.(二)具体算法与求解过程
104.在本申请的实施例中,应用有限元方法正确的求解maxwell方程、拉各朗日方程和全时间电子的运动方程,能量方程以及高能电子运动轨迹的全空间方程,提出的具体求解算法如下:
105.其中,
106.啁啾聚焦高斯脉冲激光电场的归一化矢势通常写成下面的形式:
[0107][0108]
其中a0是被mc2/e归一化的激光振幅,m和e分别是电子的静止质量和电量η=z-t,ρ2=x2+y2,l和b分别是激光的脉宽和束腰半径,其中b0是脉冲的最小半径,b是脉冲传播至z处的束腰半径,对应于此光束的瑞利长度,φ=η+c0η2+φ
r-φ
g
+φ0,c0是激光脉冲的啁啾参数,是激光脉冲的啁啾参数,与波前曲率相关的位相,r(z)是脉冲激光波前的曲率半径,波前曲率相关的位相,r(z)是脉冲激光波前的曲率半径,是与高斯光束从-∞传到+∞时将经历π位相变化相关的guoy位相,φ0是激光脉冲的初始位相,可以设定激光脉冲的初始位相为任意值,初始位相表示当电子刚刚与激光脉冲相遇时激光脉冲的位相,δ为偏振参量,其中δ=0和δ=
±
1分别对应于线偏振光和圆偏振光。
[0109]
在上面的定义中,空间和时间坐标分别被和归一化,ω0和k0分别是激光的频率和波数。显然当束腰半径发生变化时,脉冲激光的强度也发生变化,在焦点处脉冲的束腰半径最小为b0,因此这儿的强度最大;在远离焦点的区域,束腰半径比焦点处的半径大得多,因此激光的强度也有明显的下降。例如距离焦点一倍瑞利长度处,激光的峰值强度只有
焦点处激光强度50%。
[0110]
在直角坐标系中,光场的矢势可以写成:
[0111]
a
x
=a
l
cos(φ),a
y
=a
l
sin(φ)
ꢀꢀꢀ
(2)
[0112]
其中a
l
=exp(-η2/l
2-ρ2/b2)(b0/b),为了满足库伦规范条件光场存在纵向分量:
[0113]
a
z
=a
l
[-2xsin(φ+θ)/b0b+δ2ycos(φ+θ)/b0b]
ꢀꢀꢀ
(3)
[0114]
其中θ=π-tan-1
(z/z
f
),实际上,当光脉冲的束腰半径大于5λ0时,a
z
比a
x
, a
y
小一个数量级。电子在电磁场中的运动可以用拉格朗日方程和电子的能量方程描述:
[0115][0116][0117]
其中u是用光速c归一化的电子速度,a是用mc2/e归一化的矢势,p=γu 是用mc归一化的电子动量,γ=(1-u2)-1/2
是相对论因子,也是用mc2归一化的电子能量,方程(4)中的只作用于a上。
[0118]
把方程(2)和(3)带入方程(4)和(5),可以得到:
[0119][0120][0121][0122][0123]
其中u
x
,u
y
,u
z
是电子在x,y,z方向上的速度分量,求解上面的四个偏微分方程,可以得到电子在激光场中的坐标、速度、加速度以及能量随时间的变化过程。
[0124]
最后,优选地,将上述公式代入matlab程序之中,拟采用“9点微分算子法”以提高数值精度,用“近似矩阵因子分解法”来降低存储量和计算量。
[0125]
通过改变束腰半径和电子初速度的参数,得出大量的电子运动轨迹图形及能量谱图形,通过对图形变化趋势及参量(螺旋运动半径,中心点位置,能量值)的分析得出束腰半径和电子初速度对电子运动轨迹和能量产生的影响。
[0126]
电子在激光场中的运动状态,受到激光场束腰半径b0和自身速度u
z0
(包括大小和方向)等因素的影响。在使用matlab软件模拟的过程中,通过控制变量,来分别研究激光场束腰半径和自身速度u
z0
的改变所产生的影响。
[0127]
(三)分析激光脉冲束腰半径对电子运动轨迹的影响
[0128]
当控制u
z0
=0时,可得随着b0变化,电子的轨迹图像如图3所示:
[0129]
由以上图片可见,u
z0
=0时,当束腰半径为3~5时,电子运动轨迹为蒜头型,当束腰半径从8开始逐渐增大时,电子运动轨迹逐渐变成蚕茧型,起初尾部还要经历螺旋才能稳定,束腰半径大于15之后尾部螺旋逐渐消失,图像更加稳定。
[0130]
当控制uz0=0.5c时,可得随着b0变化,电子的轨迹图像如图4所示:
[0131]
由以上图片可见,当u
z0
=0.5c时,在束腰半径为3~10时,电子运动轨迹为蒜头型,且过程中逐渐由“头大身小”转变成“头小身大”,进而在束腰半径从10开始增大时转换成轴
线向外延伸的蚕茧型,在束腰半径大于15时电子运动轨迹趋于稳定。
[0132]
当控制u
z0
=-0.5c时,可得随着b0变化,电子的轨迹图像如下:
[0133]
由以上图5所示,当u
z0
=-0.5c时,在束腰半径在3附近时,电子运动轨迹为轴线侧向延伸的蚕茧型,束腰半径在大于5并逐渐增大时,轨迹仍然呈蚕茧型,只是中心轴线不再侧偏,而是向内侧延伸。
[0134]
总之,当束腰半径在1到15之间时,电子运动的轨迹较为分散,并且束腰半径的微小变化都会引起电子运动轨迹的很大变化,这样的束腰半径并不能实现对电子运动情况的稳定控制。
[0135]
当束腰半径大于15并逐渐增大时,电子运动轨迹逐渐稳定,这是由于激光较为分散,聚焦程度不高,对电子的加速能力减弱,但这样恰恰使得电子运动轨迹能够得到很好的控制。
[0136]
(四)分析电子初速度对电子运动轨迹的影响
[0137]
通过以上对束腰半径的讨论,为了更方便有效地控制电子运动,我们在束腰半径为20的情况下,讨论电子初速度对其运动轨迹的影响。uz0在
ꢀ-
0.99c~0.99c的范围内电子的部分运动轨迹图如下:
[0138]
表一(速度与激光场方向一致)(a0=5,束腰半径为20)
[0139][0140]
当电子初速度方向与激光传播方向相同时,随着电子初速度的不断增加,电子从受到撞击到最终稳定的运动路程不断增加。由图像可知,uz0在0~0.40c 时,电子运动轨迹整体呈现蚕茧形且较为集中;当uz0从0.5c~0.7c变化时,电子运动轨迹产生波动,蚕茧形轨迹尾部逐渐开始螺旋化且偏离中心轴半径不断增大;从0.80c~0.99c变化时,电子运动轨迹有较大波动,尾部螺旋现象十分明显且偏离中心轴半径也进一步加大,轨迹难以稳定下来。
[0141]
综上可见,当uz0较大时(0.70c~0.99c左右),电子在激光控制下的轨迹波动较大,处于不稳定状态,此种情况下,电子运动难以控制。
[0142]
表二(速度与激光场方向相反)(a0=5,b0=2*pi*20)(d表示电子偏离中心轴的最大半径)
[0143]
[0144][0145][0146]
通过大量绘图分析得出:在控制参量a0=5,b0=2*pi*20不变的情况下,电子的速度对电子的运动轨迹有明显影响。
[0147]
当电子初速度方向与激光传播方向相反时,由图像可知,电子初速度从 0~-0.2c变化时,电子运动轨迹整体呈蚕茧形;当电子初速度从-0.2c左右开始不断增加时,电子维持原来运动方向的趋势增强,因此电子从受到激光脉冲撞击到背离初速度方向运动期间所经历的路程也在不断增加,螺旋运动的起点位置与终点位置越来越近。
[0148]
通过公式:d=sqrt((x2/2/pi).^2+(x1/2/pi).^2);d=max(d)计算出电子轨迹偏离中心轴半径的最大值d,发现随着电子速度大小的增加,d值不断减小,且随着反向初速度的不断增加,其运动轨迹由蚕茧形两端逐渐向内螺旋凹陷成圆饼状。对运动轨迹图分析发现,电子初速度为-0.8c时达到临界状态,此时电子螺旋运动的起点与终点恰好重合。当电子速度大小继续增加时,电子受到激光场的干扰越来越小,维持其原运动方向的趋势越来越强,反向运动路程越来越短,电子运动轨迹由圆饼状两端不断向外拉伸。当电子速度为-0.9c时,反向运动路程达到临界值0,即电子刚好能延初速度方向一直运动下去,此时电子的运动轨迹恰好成陀螺状,并且陀螺两端随着电子初速度的增加继续向外拉伸,轨迹偏离中心轴位置不断减小。
[0149]
综上可见,在电子初速度与激光场方向相反时,电子运动轨迹波动小,较为集中,因此这种情况下电子运动较好控制。
[0150]
以上所述仅为本申请的优选实施例而已,并不用于限制本申请,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1