一种车辆雷达装置及其系统的制作方法
[0001]
本发明涉及车辆雷达技术领域,尤指一种包含两个天线单元的车辆雷达装置及其系统。
背景技术:
[0002]
在先进驾驶辅助系统(advanced driver assistance system,adas)、自动驾驶技术的蓬勃发展下,车辆雷达装置因具有侦测车辆近处及远处物体的功能,故其应用及需求亦随之与日俱增。
[0003]
对于四轮以上的车辆而言,特别是大型车辆,例如大客车及货车等,其视线死角为驾驶座下方、车辆后方及左右两侧。大型车辆转弯时亦会产生后轮往转弯侧偏移的「内轮差」(radius difference between inner wheels) 现象,对于所述侧人车造成相当大的威胁,其中又以右转(向驾驶座的另一侧转弯)车辆承受的风险最甚。另大型车辆有着加速或减速不易的特性,因此常容易有刹不住车而抢黄灯或闯红灯的危险行为,极度容易发生交通事故。此外,在高速行驶时,大型车辆容易产生强大的气流而引起旁边车辆的晃动,所卷起的沙尘也会影响其他车辆的行车安全,所以大型车的周围皆是危险区域。
[0004]
综合上述大型车辆的大范围视线死角及内轮差现象两种因素作用下,仅靠倡导之类的提醒仍是让行人或其他车辆暴露在极高风险之下。大型车辆中,又以必须在市区行驶的公交车肇事频率较高,且因乘载人数多时车体较笨重,导致于压过其他车辆时才发现异状,就为时已晚。目前只能被动地倡导汽机车、自行车及行人于道路通行时应尽量远离大型车辆,避免靠近大型车辆四周,遇大型车辆转弯时应与其保持更大的距离,以确保行车安全。
[0005]
因此,当今的车辆雷达装置的市场上,亟需发展一种由车辆本身,特别是大型车辆本身主动侦测周围环境中的物体以预防视线死角或内轮差问题造成交通事故的解决方案。
技术实现要素:
[0006]
本发明的目的是提供一种车辆雷达装置及其系统,其包含的第一天线单元及第二天线单元为非共平面的天线阵列,有助于提供较大侦测范围及缩小侦测死角。
[0007]
本发明提供的技术方案如下:
[0008]
依据本发明提供一种车辆雷达装置,包含第一天线单元、第二天线单元、至少一运算单元及至少一电路板。第一天线单元及第二天线单元与运算单元通信连接。电路板包含第一板部及第二板部,第一天线单元为电路板形式且设置于第一板部,第二天线单元为电路板形式且设置于第二板部,所述至少一运算单元设置于第一板部及第二板部中至少一者。第一板部与第二板部的夹角为p12,其满足下列条件:80度≤p12≤130度。因此,有助于提供较大侦测范围及缩小侦测死角。
[0009]
根据前述的车辆雷达装置,可还包含外壳,其中第一天线单元、第二天线单元、运算单元及电路板皆设置在外壳中。
[0010]
根据前述的车辆雷达装置,其中外壳包含底部。第一板部与底部的外表面的夹角为b1,第二板部与底部的外表面的夹角为b2,其可满足下列条件: 25度≤b1≤50度;以及25度≤b2≤50度。
[0011]
根据前述的车辆雷达装置,其中外壳包含底部。车辆雷达装置的厚度是由底部的外表面算起且厚度为ht,其可满足下列条件:15mm≤ht≤50mm。
[0012]
根据前述的车辆雷达装置,其中外壳包含两个罩部。两个罩部中各者的厚度一致,第一板部与两个罩部中一者平行且其间距为s1,第二板部与两个罩部中另一者平行且其间距为s2,其可满足下列条件:0mm<s1≤5mm;以及0mm<s2≤5mm。
[0013]
根据前述的车辆雷达装置,可还包含至少一投地灯,其由外壳的两个罩部向外照射。
[0014]
根据前述的车辆雷达装置,其中所述至少一运算单元的数量可为两个,第一天线单元及第二天线单元分别与所述两个运算单元通信连接,所述两个运算单元分别设置于第一板部及第二板部。
[0015]
根据前述的车辆雷达装置,其中电路板的数量可为一个,第一板部及第二板部皆位于电路板。
[0016]
根据前述的车辆雷达装置,其中所述至少一电路板的数量可为两个,第一板部及第二板部分别位于所述二电路板中一者及另一者。
[0017]
根据前述的车辆雷达装置,其中第一天线单元的操作频率及第二天线单元的操作频率可皆大于10ghz,第一天线单元包含至少一第一发射天线及至少一第一接收天线,第二天线单元包含至少一第二发射天线及至少一第二接收天线。
[0018]
根据前述的车辆雷达装置,其中第一天线单元可包含至少两个第一接收天线,所述至少两个第一接收天线分别为至少两种天线形式,第二天线单元可包含至少两个第二接收天线,所述至少两个第二接收天线分别为至少两种天线形式。
[0019]
根据前述的车辆雷达装置,其中第一发射天线、第一接收天线、第二发射天线及第二接收天线中至少一者的结构可包含弯折线天线。
[0020]
根据前述的车辆雷达装置,其中第一发射天线、第一接收天线、第二发射天线及第二接收天线中至少一者的结构可包含贴片天线。
[0021]
根据前述的车辆雷达装置,其中第一天线单元于一平面的主波瓣的中心线与第二天线单元于所述平面的主波瓣的中心线的夹角为a12,且所述平面垂直第一板部及第二板部,其可满足下列条件:50度≤a12≤100度。
[0022]
根据前述的车辆雷达装置,其中第一天线单元于一平面的主波瓣的半功率波束宽为ah1,第二天线单元于所述平面的主波瓣的半功率波束宽为ah2,且所述平面垂直第一板部及第二板部,其可满足下列条件:100度≤ah1< 180度;以及100度≤ah2<180度。
[0023]
根据前述的车辆雷达装置,其中第一天线单元于另一平面的主波瓣的半功率波束宽为av1,且所述另一平面垂直所述平面及第一板部,第二天线单元于再一平面的主波瓣的半功率波束宽为av2,且所述再一平面垂直所述平面及第二板部,其可满足下列条件:100度≤av1<180度;以及100度≤av2 <180度。
[0024]
由前述的车辆雷达装置,有助于更精确地侦测周围环境中的物体。
[0025]
依据本发明另提供一种车辆雷达系统,设置于车辆,车辆雷达系统包含至少一车
辆雷达装置,所述至少一车辆雷达装置设置于车辆的左侧及右侧中至少一侧,车辆雷达装置包含第一天线单元、第二天线单元、至少一运算单元及至少一电路板。第一天线单元及第二天线单元与运算单元通信连接。电路板包含第一板部及第二板部,第一板部及第二板部皆垂直车辆的水平的平面,第一天线单元为电路板形式且设置于第一板部,第二天线单元为电路板形式且设置于第二板部,所述至少一运算单元设置于第一板部及第二板部中至少一者。第一板部与第二板部的夹角为p12,其满足下列条件:80度≤p12 ≤130度。因此,有助于车辆雷达系统在简化其装置数量的同时缩小侦测死角。
[0026]
根据前述的车辆雷达系统,其中第一板部与车辆雷达装置所设置的车辆的所述一侧的夹角为v1,第二板部与车辆雷达装置所设置的车辆的所述一侧的夹角为v2,其可满足下列条件:25度≤v1≤50度;以及25度≤v2≤ 50度。
[0027]
根据前述的车辆雷达系统,其中车辆雷达装置还包含外壳,其中第一天线单元、第二天线单元、运算单元及电路板皆设置在外壳中,外壳包含底部,底部的外表面平行车辆雷达装置所设置的车辆的所述一侧。车辆雷达装置的厚度是由底部的外表面算起且厚度为ht,其可满足下列条件:15mm≤ht≤ 50mm。
[0028]
根据前述的车辆雷达系统,其中车辆的长度可为10m以上且18m以下,车辆雷达装置的数量为一个,且车辆雷达装置设置于车辆的左侧或右侧。
[0029]
根据前述的车辆雷达系统,可还包含至少一侧边雷达装置,其设置于车辆的左侧及右侧中至少一者,侧边雷达装置及车辆雷达装置中一者透过另一者与车辆的车辆控制单元通信连接。
[0030]
根据前述的车辆雷达系统,其中车辆的长度可为4m以上且8m以下,所述至少一车辆雷达装置的数量为两个,且所述两个车辆雷达装置中一者设置于车辆的左侧并邻近车辆的后侧,所述两个车辆雷达装置中另一者设置于车辆的右侧并邻近车辆的后侧。
[0031]
根据前述的车辆雷达系统,其中所述两个车辆雷达装置中一者可透过另一者与车辆的车辆控制单元通信连接。
[0032]
根据前述的车辆雷达系统,其中车辆雷达系统的内轮差侦测模式可透过车辆的方向灯信号、舵角信号及横摆角速度信号中至少一者启动。
[0033]
根据前述的车辆雷达系统,其中当车辆雷达系统于内轮差侦测模式时,车辆雷达系统可透过方向灯信号、舵角信号及横摆角速度信号中所述至少一者计算出车辆的转弯信息,车辆雷达系统依据转弯信息适应性地调整车辆的报警条件。
[0034]
由前述的车辆雷达系统,有助于车辆雷达系统中的装置安装于车辆的外表面时不致于过于凸出以符合相关规定,且仍有足够的侦测角度及范围。
附图说明
[0035]
下面将以明确易懂的方式,结合附图说明优选实施方式,对一种车辆雷达装置及其系统统的上述特性、技术特征、优点及其实现方式予以进一步说明。
[0036]
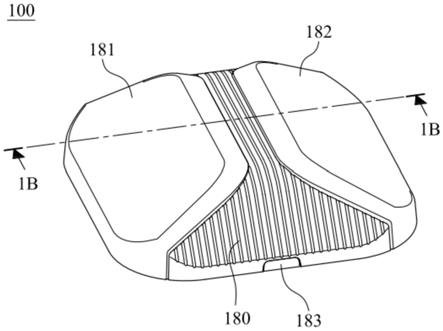
图1是本发明第一实施例的车辆雷达装置的示意图;
[0037]
图2是依照图1剖面线1b-1b的剖视图;
[0038]
图3是第一实施例的车辆雷达装置的爆炸图;
[0039]
图4是第一实施例的车辆雷达装置的另一爆炸图;
[0040]
图5是第一实施例的车辆雷达装置的再一爆炸图;
[0041]
图6是本发明第二实施例的车辆雷达装置的示意图;
[0042]
图7是依照第6图剖面线2b-2b的剖视图;
[0043]
图8是第二实施例的车辆雷达装置的爆炸图;
[0044]
图9是第二实施例的车辆雷达装置的另一爆炸图;
[0045]
图10是第二实施例的车辆雷达装置的再一爆炸图;
[0046]
图11是第二实施例的车辆雷达装置的参数示意图;
[0047]
图12是依照第7图剖面线2g-2g的剖视图;
[0048]
图13是第二实施例的车辆雷达装置的另一参数示意图;
[0049]
图14是本发明第三实施例的车辆雷达装置的示意图;
[0050]
图15是本发明第四实施例的车辆雷达系统设置于车辆的示意图;
[0051]
图16是第四实施例的车辆雷达系统设置于车辆的方块图;
[0052]
图17是第四实施例中侧边雷达装置的示意图;
[0053]
图18是依照第17图剖面线4d-4d的剖视图;
[0054]
图19是第17图中侧边雷达装置的爆炸图;
[0055]
图20是第四实施例中另一侧边雷达装置的示意图;
[0056]
图21是依照第20图剖面线4g-4g的剖视图;
[0057]
图22是第20图中侧边雷达装置的爆炸图;以及
[0058]
图23是本发明第五实施例的车辆雷达系统设置于车辆的示意图。
[0059]
附图标号说明:
[0060]
车辆:40、50
[0061]
前侧:47、57
[0062]
左侧:48l、58l
[0063]
右侧:48r、58r
[0064]
后侧:49、59
[0065]
车辆控制单元:41
[0066]
报警单元:42
[0067]
车载诊断单元:43
[0068]
摄影单元:44
[0069]
显示单元:45
[0070]
控制器区域网络:46
[0071]
私人控制器区域网络:46p
[0072]
前侧雷达装置:4710、5710
[0073]
后侧雷达装置:4910
[0074]
车辆雷达系统:4800、5800
[0075]
侧边雷达装置:4810、4810a、4820、4830
[0076]
电路板:4816、4816a、4826、4836
[0077]
外壳:4817、4817a
[0078]
底部:4818、4818a
[0079]
外表面:4819、4819a
[0080]
车辆雷达装置:100、200、200a、200b、300
[0081]
第一天线单元:111、211
[0082]
第一发射天线:121、221、231
[0083]
第一接收天线:141、241、251
[0084]
第二天线单元:112、212
[0085]
第二发射天线:122、222、232
[0086]
第二接收天线:142、242、252
[0087]
串联馈电贴片阵列:123、124、143、144、223、224、243、244
[0088]
金属垫:125、126、145、146、225、226、245、246
[0089]
运算单元:107、207
[0090]
电路板:161、162、261
[0091]
第一板部:171、271、271a、271b
[0092]
第二板部:172、272、272a、272b
[0093]
外壳:180、280、380
[0094]
底部:183、283、383
[0095]
外表面:184、284
[0096]
罩部:181、182、281、282、381、382
[0097]
投地灯:391、392
[0098]
p12:第一板部与第二板部的夹角
[0099]
b1:第一板部与底部的外表面的夹角
[0100]
b2:第二板部与底部的外表面的夹角
[0101]
ht:车辆雷达装置的厚度
[0102]
s1:第一板部与两个罩部中一者的间距
[0103]
s2:第二板部与两个罩部中一者的间距
[0104]
hl1:第一天线单元于一平面的主波瓣
[0105]
hl2:第二天线单元于一平面的主波瓣
[0106]
c1:第一天线单元于一平面的主波瓣的中心线
[0107]
c2:第二天线单元于一平面的主波瓣的中心线
[0108]
a12:第一天线单元于一平面的主波瓣的中心线与第二天线单元于所述平面的主波瓣的中心线的夹角
[0109]
m1、m2:半功率标示点
[0110]
ah1:第一天线单元于一平面的主波瓣的半功率波束宽
[0111]
vl1:第一天线单元于另一平面的主波瓣
[0112]
av1:第一天线单元于另一平面的主波瓣的半功率波束宽
[0113]
v1、v1a、v1b:第一板部与车辆雷达装置所设置的车辆的一侧的夹角
[0114]
v2、v2a、v2b:第二板部与车辆雷达装置所设置的车辆的一侧的夹角
[0115]
w1、w2、w3:侧边雷达装置的电路板与侧边雷达装置所设置的车辆的一侧的夹角
具体实施方式
[0116]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
[0117]
为使图面简洁,各图中只示意性地表示出了与本发明相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
[0118]
以下将参照图式说明本发明之复数个实施例。为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,应了解到,这些实务上的细节不应用以限制本发明。也就是说,在本发明部分实施例中,这些实务上的细节是非必要的。此外,为简化图式起见,一些习知惯用的结构与元件在图式中将以简单示意的方式绘示之;并且重复之元件将可能使用相同的编号表示之。
[0119]
请参照第1图至第5图,其中第1图绘示本发明第一实施例的车辆雷达装置100的示意图,第2图绘示依照第1图剖面线1b-1b的剖视图,第3图绘示第一实施例的车辆雷达装置100的爆炸图,第4图绘示第一实施例的车辆雷达装置100的面对第一板部171视角的爆炸图,第5图绘示第一实施例的车辆雷达装置100的面对第二板部172视角的爆炸图,且第一实施例中图式省略组装或锁固元件以及电路板161、162上的细节元件。由第1图至第5 图可知,车辆雷达装置100包含第一天线单元111、第二天线单元112、运算单元107及电路板161、162。
[0120]
第一天线单元111及第二天线单元112与运算单元107通信连接,其中运算单元107可包含处理元件及储存元件。电路板161、162分别包含第一板部171及第二板部172,第一天线单元111为电路板形式且设置于第一板部 171,第二天线单元112为电路板形式且设置于第二板部172。第一实施例中,第一板部171为电路板161、162中一部分,具体为电路板161的至少一部分。第二板部172为电路板161、162中一部分,具体为电路板162的至少一部分。运算单元107设置于第一板部171(即第一板部171及第二板部172中一者),复数射频发射元件(例如功率放大器、滤波器等,但不以此为限)及复数射频接收元件(例如低噪声放大器、滤波器等,但不以此为限)耦接于第一天线单元111与运算单元107之间,且所述射频发射元件、所述复数射频接收元件及运算单元107设置于屏蔽罩(shielding cover)中。依据本发明的其他实施例中,第一板部及第二板部可分别为同一块电路板上的两部分。
[0121]
由第2图可知,第一板部171与第二板部172的夹角为p12,其满足下列条件:80度≤p12≤130度。因此,第一天线单元111及第二天线单元112 为非共平面的天线阵列,有助于仅应用单一装置(即车辆雷达装置100)即可提供所需的较大侦测角度及范围,且满足前述参数p12条件范围的车辆雷达装置100可有效缩小位于第一板部171与第二板部172之间的侦测死角,亦有助于车辆雷达装置100的小型化。第一实施例中,参数p12为120度。
[0122]
第一实施例中,车辆雷达装置100可还包含外壳180,其中第一天线单元 111、第二天线单元112、运算单元107及电路板161、162皆设置在外壳180 中。
[0123]
外壳180包含底部183。第一板部171与底部183的外表面184的夹角为 b1,第二板
部172与底部183的外表面184的夹角为b2,其可满足下列条件: 25度≤b1≤50度;以及25度≤b2≤50度。因此,有助于以底部183 直接贴附于车体的外表面,除能简化车辆雷达装置100于车体的安装工序,更可维持预期的侦测角度及范围。第一实施例中,参数b1为30度,参数b2 为30度。
[0124]
车辆雷达装置100的厚度是由底部183的外表面184算起且厚度为ht,其可满足下列条件:15mm≤ht≤50mm。大型车辆的车体多为金属材质,因此车辆雷达装置100并不适于安装于车体内部,故车辆雷达装置100有助于安装于车体外表面时不致于过于凸出(例如不大于保险杆的厚度)以符合相关规定,且满足前述参数p12或b1、b2条件范围的车辆雷达装置100在进一步满足前述参数ht条件范围时仍有足够的侦测角度及范围。第一实施例中,参数ht约为29.9mm。
[0125]
外壳180还包含两个罩部,即罩部181、182。罩部181的厚度本质上一致,罩部182的厚度本质上一致,即排除了由不可避免的制造公差所导致的厚度不均的情况。第一板部171(即第一天线单元111的信号发射源的位置) 与罩部181、182中一者(即罩部181)平行且其间距为s1,第二板部172(即第二天线单元112的信号发射源的位置)与罩部181、182中另一者(即罩部182) 平行且其间距为s2,其可满足下列条件:0mm<s1≤5mm;以及0mm<s2 ≤5mm。因此,外壳180具有小型化设计且可降低其透镜效应而避免聚焦或分散雷达波,使车辆雷达装置100具有广角侦测的功能,并具有抗振性以降低噪声。较佳地,其可满足下列条件:2mm≤s1≤3mm;以及2mm≤s2 ≤3mm。第一实施例中,参数s1为2.5mm,参数s2为2.5mm。依据本发明的实施例中,外壳中的两个罩部分别接近第一板部及第二板部,外壳中的底部远离第一板部及第二板部之间的间距较小的一侧。
[0126]
依据本发明的其他实施例中(图未揭示),车辆雷达装置若欲作远距侦测,邻近及面对第一板部及第二板部的外壳的两个罩部中各者的两个表面可设计为曲面(即各罩部的厚度不一致),以产生透镜效应,简单地说各罩部像是能改变雷达波方向的电磁透镜,各罩部的表面曲率与其材质的介电常数有关,各罩部不同的形状(亦可说是电磁透镜形状)将产生不同的电场相位。此外,当车辆雷达装置的各罩部的外表面为凸面时,若有灰尘或雨水等附着于各罩部的外表面,在车辆行进时因为空气的流动,这些附着物将容易顺着外表面的曲面形状被吹走,从而维持各罩部的电磁透镜特性,即不会因为灰尘或雨水的影响而改变各罩部的表面曲率或雷达波路径的长度。
[0127]
由第4图及第5图可知,运算单元107的数量为一个,第一天线单元111 及第二天线单元112与运算单元107通信连接,运算单元107设置于第一板部171。具体而言,电路板161、162之间可以软性电路板、另一电路板、连接器、缆线(不以此为限)中至少一者电性连接,而使设置于电路板162的第二天线单元112与设置于电路板161的运算单元107通信连接。因此,有助于车辆雷达装置100的小型化,及有效整合第一天线单元111及第二天线单元112的发射信号及接收信号。
[0128]
依据本发明的其他实施例中(图未揭示),车辆雷达装置中运算单元的数量可为两个,第一天线单元及第二天线单元分别与所述两个运算单元通信连接,所述两个运算单元分别设置于第一板部及第二板部。因此,有助于车辆雷达装置的设计灵活性及便利性。再者,所述两个运算单元可分别与车辆的车辆控制单元通信连接,或者所述两个运算单元中一者透过另一者与车辆的车辆控制单元通信连接。
[0129]
第一实施例中,车辆雷达装置100中电路板的数量为两个,即电路板161、 162,第一板部171及第二板部172分别位于电路板161及162。因此,有助于电路板161、162及有关元件依需求直接应用于参数p12数值不同的多种车辆雷达装置。
[0130]
第一天线单元111的操作频率及第二天线单元112的操作频率可皆大于 10ghz。较佳地,第一天线单元111的操作频率及第二天线单元112的操作频率可皆大于10ghz且小于300ghz。更佳地,第一天线单元111的操作频率及第二天线单元112的操作频率可为24ghz+/-5g hz、77ghz+/-5g hz、或79ghz+/-5g hz。第一天线单元111包含至少一第一发射天线121及至少一第一接收天线141,第二天线单元112包含至少一第二发射天线122及至少一第二接收天线142。因此,有助于车辆雷达装置100更精确地侦测周围环境中的物体。第一实施例中,第一天线单元111的操作频率及第二天线单元 112的操作频率皆约为79ghz。
[0131]
第一发射天线121、第一接收天线141、第二发射天线122及第二接收天线142中至少一者的结构可包含贴片(patch)天线。因此,有助于车辆雷达装置100兼顾小型化及提供较大侦测范围。第一实施例中,第一发射天线121、第一接收天线141、第二发射天线122及第二接收天线142中各者的结构皆包含贴片天线。依据本发明的实施例中,第一发射天线、第一接收天线、第二发射天线及第二接收天线中至少一者的结构所包含的贴片天线可以是单一贴片天线或复数贴片形的辐射元件(radiating element)形成的天线阵列,例如串联馈电贴片阵列(series-fed patch array,sfpa),但不以此为限。
[0132]
具体而言,第一发射天线121的数量及第一接收天线141的数量皆为两个。在第一板部171上,各第一发射天线121的结构包含一个串联馈电贴片阵列123及其两侧沿所述阵列方向排列的复数金属垫(pad)125,各第一接收天线141的结构包含一个串联馈电贴片阵列143及其两侧沿所述阵列方向排列的复数金属垫145,且第一发射天线121及第一接收天线141的具体配置如第4图所示,但不以此为限。第二发射天线122的数量及第二接收天线142 的数量皆为两个。在第二板部172上,各第二发射天线122的结构包含一个串联馈电贴片阵列124及其两侧沿所述阵列方向排列的复数金属垫126,各第二接收天线142的结构包含一个串联馈电贴片阵列144及其两侧沿所述阵列方向排列的复数金属垫146,且第二发射天线122及第二接收天线142的具体配置如第5图所示,但不以此为限。依据本发明的其他实施例中(图未揭示),第一天线单元及第二天线单元的天线形式可依侦测应用而互不相同,且不限于本发明实施例所述的天线形式。再者,第一发射天线、第一接收天线、第二发射天线及第二接收天线的数量可互不相同,且各者的数量可为一个或三个以上。
[0133]
于第一天线单元111的操作频率及第二天线单元112的操作频率下,第一天线单元111于一平面的主波瓣hl1的中心线c1与第二天线单元112于所述平面的主波瓣hl2的中心线c2的夹角为a12,且所述平面垂直第一板部171、第二板部172及外表面184,其可满足下列条件:50度≤a12≤100度。因此,车辆雷达装置100可达成小型化并具体满足所需的侦测角度及范围规格。第一实施例中,参数a12为60度。
[0134]
实质上,第一天线单元111于所述平面的主波瓣hl1的中心线c1的方向亦为第一天线单元111的三维辐射场型中最大增益(gain)的方向,第二天线单元112于所述平面的主波瓣hl2的中心线c2的方向亦为第二天线单元112 的三维辐射场型中最大增益的方向。进一步而言,依据本发明的参数a12可以是第一发射天线121于所述平面的主波瓣hl1的中心线c1与第二发射天线 122于所述平面的主波瓣hl2的中心线c2的夹角,或是参数a12可以是第
一接收天线141于所述平面的主波瓣hl1的中心线c1与第二接收天线142于所述平面的主波瓣hl2的中心线c2的夹角。
[0135]
第一天线单元111于所述平面的主波瓣hl1的半功率波束宽(half power beam width,hpbw)为ah1,第二天线单元112于所述平面的主波瓣hl2的半功率波束宽为ah2,且所述平面垂直第一板部171、第二板部172及外表面184,其可满足下列条件:100度≤ah1<180度;以及100度≤ah2<180度。因此,有助于车辆雷达装置100的侦测角度达180度或以上,且当车辆雷达装置100作为内轮差侦测雷达时,有利于对较短距离内且慢速移动的物体提供较精确的侦测。第一实施例中,参数ah1为120度,参数ah2为120度。
[0136]
请参照第6图至第10图,其中第6图绘示本发明第二实施例的车辆雷达装置200的示意图,第7图绘示依照第6图剖面线2b-2b的剖视图,第8图绘示第二实施例的车辆雷达装置200的爆炸图,第9图绘示第二实施例的车辆雷达装置200的面对第一板部271视角的爆炸图,第10图绘示第二实施例的车辆雷达装置200的面对第二板部272视角的爆炸图,且第二实施例中图式省略组装或锁固元件以及电路板261上的细节元件。由第6图至第10图可知,车辆雷达装置200包含第一天线单元211、第二天线单元212、运算单元 207及电路板261。
[0137]
第一天线单元211及第二天线单元212与运算单元207通信连接。电路板261包含第一板部271及第二板部272,第一天线单元211为电路板形式且设置于第一板部271,第二天线单元212为电路板形式且设置于第二板部272。第一板部271为电路板261中一部分,第二板部272为电路板261中另一部分,运算单元207设置于第一板部271。第二实施例中,参数p12为120度。
[0138]
车辆雷达装置200还包含外壳280,其中第一天线单元211、第二天线单元212、运算单元207及电路板261皆设置在外壳280中,外壳280包含底部 283。第二实施例中,参数b1为30度,参数b2为30度。车辆雷达装置200 的厚度是由底部283的外表面284算起且厚度为ht,且参数ht约为28.9mm。
[0139]
外壳280还包含两个罩部,即罩部281、282。罩部281的厚度本质上一致,罩部282的厚度本质上一致。第一板部271与罩部281平行且其间距为 s1,第二板部272与罩部282平行且其间距为s2。第二实施例中,参数s1为 2.5mm,参数s2为2.5mm。
[0140]
由第9图及第10图可知,运算单元207的数量为一个,第一天线单元211 及第二天线单元212与运算单元207通信连接,运算单元207设置于第一板部271。
[0141]
第二实施例中,电路板261的数量为一个,第一板部271及第二板部272 皆位于电路板261。因此,有助于降低车辆雷达装置200的机构设计复杂度。具体而言,电路板261为非平面电路板,其可由模造、压造等方式制造而成,但不以此为限。
[0142]
第一天线单元211的操作频率及第二天线单元212的操作频率皆大于10 ghz。第二实施例中,第一天线单元211的操作频率及第二天线单元212的操作频率皆约为79ghz。第一天线单元211包含第一发射天线221、231及第一接收天线241、251,第二天线单元212包含第二发射天线222、232及第二接收天线242、252。
[0143]
第二实施例中,第一发射天线221、第一接收天线241、第二发射天线222 及第二接收天线242中各者的结构皆包含贴片天线。
[0144]
第一发射天线231、第一接收天线251、第二发射天线232及第二接收天线252中各者皆为弯折线天线(meander line antenna)。因此,使第一天线单元211及第二天线单元
212在选择足够波束宽度的平面与设计极化方向上更有弹性,并更加有助于车辆雷达装置200的小型化。依据本发明的实施例中,第一发射天线、第一接收天线、第二发射天线及第二接收天线中至少一者的部分结构或全部结构可为弯折线天线的天线形式,且弯折线天线的天线形式可为单一弯折线天线(例如第一发射天线231)、双弯折线天线、渐变式弯折线天线、折叠式弯折线天线,且不以此为限。
[0145]
第一天线单元211包含至少两个第一接收天线(即第一接收天线241、 251),其分别为两种天线形式,第二天线单元212包含至少两个第二接收天线(第二接收天线242、252),其分别为两种天线形式。因此,有助于第一天线单元211及第二天线单元212皆可为至少二不同的平面设计足够的波束宽度。第二实施例中,第一天线单元211包含两个第一接收天线(即第一接收天线241、251),第一接收天线241、251分别为结构中具有串联馈电贴片阵列 243的天线形式及弯折线天线的天线形式,第二天线单元212包含两个第二接收天线(第二接收天线242、252),第二接收天线242、252分别为结构中具有串联馈电贴片阵列244的天线形式及弯折线天线的天线形式。
[0146]
具体而言,第一发射天线221的数量、第一发射天线231的数量、第一接收天线241的数量及第一接收天线251的数量皆为一个。在第一板部271 上,第一发射天线221的结构包含一个串联馈电贴片阵列223及其两侧沿所述阵列方向排列的复数金属垫225,第一发射天线231为弯折线天线,第一接收天线241的结构包含一个串联馈电贴片阵列243及其两侧沿所述阵列方向排列的复数金属垫245,第一接收天线251为弯折线天线,且第一发射天线 221、231及第一接收天线241、251的具体配置如9图所示,但不以此为限。第二发射天线222的数量、第二发射天线232的数量、第二接收天线242的数量及第二接收天线252的数量皆为一个。在第二板部272上,第二发射天线222的结构包含一个串联馈电贴片阵列224及其两侧沿所述阵列方向排列的复数金属垫226,第二发射天线232为弯折线天线,第二接收天线242的结构包含一个串联馈电贴片阵列244及其两侧沿所述阵列方向排列的复数金属垫246,第二接收天线252为弯折线天线,且第二发射天线222、232及第二接收天线242、252的具体配置如第10图所示,但不以此为限。依据本发明的其他实施例中(图未揭示),第一发射天线、第一接收天线、第二发射天线及第二接收天线的数量可互不相同,各者的天线形式可为三种以上,且各者的各天线形式的数量可为两个以上。
[0147]
请参照第11图,其绘示第二实施例的车辆雷达装置200的参数a12示意图,且第11图中的主波瓣hl1、hl2并非车辆雷达装置200上的物理结构。由第11图可知,于第一天线单元211的操作频率及第二天线单元212的操作频率下,第一天线单元211于一平面的主波瓣hl1的中心线c1与第二天线单元212于所述平面的主波瓣hl2的中心线c2的夹角为a12,且所述平面垂直第一板部271、第二板部272及外表面284并即是第11图所绘示之平面。第二实施例中,参数a12为60度。
[0148]
实质上,第一天线单元211于所述平面的主波瓣hl1的中心线c1的方向亦为第一天线单元211的三维辐射场型中最大增益的方向,第二天线单元212 于所述平面的主波瓣hl2的中心线c2的方向亦为第二天线单元212的三维辐射场型中最大增益的方向。进一步而言,依据本发明的参数a12可以是第一发射天线221及231中至少一者于所述平面的主波瓣的中心线与第二发射天线222及232中至少一者于所述平面的主波瓣的中心线的夹角,或是参数a12 可以是第一接收天线241及251中至少一者于所述平面的主波瓣的中心线与第二接收
天线242及252中至少一者于所述平面的主波瓣的中心线的夹角。再者,第11图中的参数a12是以第一接收天线241的主波瓣hl1与第二接收天线242的主波瓣hl2示意。
[0149]
再者,第一天线单元211于所述平面的主波瓣hl1的半功率波束宽(hpbw) 为ah1,第二天线单元212于所述平面的主波瓣hl2的半功率波束宽为ah2,且所述平面垂直第一板部271、第二板部272及外表面284。第二实施例中,参数ah1为120度,参数ah2为120度。
[0150]
请参照第12图及第13图,其中第12图绘示依照第7图剖面线2g-2g的剖视图,且第12图中的主波瓣vl1并非车辆雷达装置200上的物理结构,第 13图绘示第二实施例的车辆雷达装置200的参数av1示意图,且第13图亦是第一天线单元211于另一平面(即第12图所绘示之平面)的辐射场型的示意图,特别是当量测天线的极化方向平行所述另一平面(即第12图)的辐射场型的示意图。具体而言,第13图可为第一发射天线231(即弯折线天线)于所述另一平面的辐射场型的示意图,第13图亦可为第一接收天线251于所述另一平面的辐射场型的示意图,且第二实施例中第二发射天线232或第二接收天线252于再一平面的辐射场型的参数av2的示意图可与第13图相似。
[0151]
由第12图及第13图可知,第一天线单元211于所述另一平面的主波瓣 vl1的半功率波束宽(hpbw)为av1,其为第13图中的半功率标示点m1、m2所定义,且所述另一平面垂直所述平面(即第11图所绘示之平面)及第一板部 271,第二天线单元212于所述再一平面的主波瓣的半功率波束宽为av2(图未揭示),且所述再一平面垂直所述平面及第二板部272,其满足下列条件:100 度≤av1<180度;以及100度≤av2<180度。因此,有助于车辆雷达装置200于应用上在水平的平面及垂直平面皆具有足够的侦测范围。第二实施例中,参数av1为128度,参数av2为128度。
[0152]
进一步而言,第一天线单元211中,第一发射天线221、231分别具有半功率波束宽ah1、av1的两个平面相差90度,第一接收天线241、251分别具有半功率波束宽ah1、av1的所述两个平面相差90度,所述两个平面即分别为第11图及第12图所绘示之平面,且所述两个平面于应用上可分别为水平的平面及垂直平面,即第11图可为第一发射天线221或第一接收天线241的水平极化量测场型(半功率波束宽ah1为120度)的示意图,第12图可为第一发射天线231或第一接收天线251的垂直极化量测场型(半功率波束宽av1为 128度)的示意图,故可同时或轮流使用使相差90度的所述两个平面皆具有足够的侦测范围。第二天线单元212中,第二发射天线222、232分别具有半功率波束宽ah2、av2的两个平面相差90度,第二接收天线242、252分别具有半功率波束宽ah2、av2的所述两个平面相差90度,且所述两个平面于应用上可分别为水平的平面及垂直平面,故可同时或轮流使用使相差90度的所述两个平面皆具有足够的侦测范围。现有技术中的车辆雷达的波束宽度主要在单一平面(如水平的平面),而当车辆雷达装置200作为内轮差侦侧雷达时,侦测目标是反射信号较弱的行人、脚踏车、机车,故第一天线单元211及第二天线单元212在水平的平面及垂直平面皆有足够的波束宽度有助于车辆雷达装置200增加信号采集效果。
[0153]
请参照第14图,其绘示本发明第三实施例的车辆雷达装置300的示意图。第三实施例中,车辆雷达装置300包含第一天线单元、第二天线单元、运算单元及电路板。第一天线单元及第二天线单元与运算单元通信连接。电路板包含第一板部及第二板部,第一天线单元为电路板形式且设置于第一板部,第二天线单元为电路板形式且设置于第二板部,运算单元设置于第一板部及第二板部中一者。
[0154]
由14图可知,车辆雷达装置300还包含外壳380,其中第一天线单元、第二天线单元、运算单元及电路板皆设置在外壳380中,外壳380包含底部 383及罩部381、382。
[0155]
车辆雷达装置300还包含投地灯391、392,其由外壳380的罩部381、 382向外照射。因此,当车辆雷达装置300作为内轮差侦测雷达且配置投地灯 391、392时,可在车辆判定转弯时投射出危险区域以警示行人及邻近车辆及早回避。进一步而言,投地灯391、392中各者是通过led光源照射在菲林片 (film)上,再通过透镜的折射把菲林片上的图像呈现在所照射的物体上。再者,第三实施例的车辆雷达装置300除了配备投地灯391、392外,车辆雷达装置300的其他特征可与第二实施例中所述的车辆雷达装置200的特征相同。
[0156]
请参照第15图及第16图,其中第15图绘示本发明第四实施例的车辆雷达系统4800设置于车辆40的示意图(未依实际比例绘示),第16图绘示第四实施例的车辆雷达系统4800设置于车辆40的方块图。由第15图及第16图可知,车辆雷达系统4800设置于车辆40,车辆雷达系统4800包含前述第一实施例的车辆雷达装置100,其数量为一个。车辆雷达装置100设置于车辆 40的左侧48l及右侧48r中至少一侧(具体上设置于右侧48r)。再者,车辆 40的车体包含前侧47、左侧48l、右侧48r及后侧49,且前侧47、左侧48l、右侧48r及后侧49本质上形成一方形,并如第15图所绘示。依据本发明的其他实施例中,车辆雷达装置可设置于车辆的左侧,且车辆雷达系统可包含前述第二实施例的车辆雷达装置200、第三实施例的车辆雷达装置300、或是其他依据本发明的车辆雷达装置。
[0157]
由第2图及第15图可知,车辆雷达装置100包含第一天线单元111、第二天线单元112、运算单元107及电路板161、162。第一天线单元111及第二天线单元112与运算单元107通信连接。电路板161、162分别包含第一板部171及第二板部172,第一板部171及第二板部172皆垂直车辆40的水平的平面(即第15图所绘示的平面),第一天线单元111为电路板形式且设置于第一板部171,第二天线单元112为电路板形式且设置于第二板部172,运算单元107设置于第一板部171。第一板部171与第二板部172的夹角为p12,其满足下列条件:80度≤p12≤130度。因此,有助于车辆雷达系统4800 于简化其装置数量的同时缩小侦测死角,进而提升侦测范围及精度。第四实施例中,参数p12为120度。有关车辆雷达装置100的其他细节请参照前述第一实施例的内容,在此不再详述。
[0158]
由第15图可知,第一板部171与车辆雷达装置100所设置的车辆40的右侧48r的夹角为v1,第二板部172与车辆雷达装置100所设置的车辆40的右侧48r的夹角为v2,其可满足下列条件:25度≤v1≤50度;以及25 度≤v2≤50度。因此,当车辆40作为左驾环境中的大客车,特别是大众运输工具中的公交车时,在一些国家(例如欧盟)法规的要求下,依车辆40的车辆控制单元41的估算,任何可能进入乘客侧(即公交车上车的车门侧,第四实施例中的右侧48r)15m之内范围(具体上可以是位于右侧48r的右方,宽度3m且长度为车辆40的车体长度再往前方加6m的范围)的车辆,车辆 40都需提前产生报警信号,而满足前述参数v1及v2条件范围的车辆雷达系统4800,以其车辆雷达装置100中的第一天线单元111、第二天线单元112 及相关元件有助于达成180度以上的视角(field of view,fov)及30m以上的侦测距离,以符合前述法规要求,并达成车辆40的内轮差侦测、bsd(blind spot detection,盲点侦测)及lca(lane change assistance,车道变换辅助) 功能。第四实施例中,参数v1为30度,参数v2为30度。再者,由于外壳 180的底部183的外表面184与车辆雷达装置100所设置的车辆40的右侧48r 平行,故第四实施例中的参数v1与b1的数值相同,参数v2与b2的数值
相同。
[0159]
由第2图可知,车辆雷达装置100还包含外壳180,其中第一天线单元 111、第二天线单元112、运算单元107及电路板161、162皆设置在外壳180 中。外壳180包含底部183,底部183的外表面184平行车辆雷达装置100所设置的车辆40的右侧48r。车辆雷达装置100的厚度是由底部183的外表面 184算起且厚度为ht,其可满足下列条件:15mm≤ht≤50mm。因此,有助于车辆雷达系统4800中的装置安装于车辆40的外表面时不致于过于凸出以符合相关规定,且仍有足够的侦测角度及范围。第四实施例中,参数ht 约为29.9mm。
[0160]
由第15图及第16图可知,车辆40的长度可为10m以上且18m以下,车辆雷达装置100的数量为一个,且车辆雷达装置100设置于车辆40的右侧 48r。因此,当车辆40作为左驾环境中的大客车,特别是大众运输工具中的公交车时符合法规要求,并达成车辆40的内轮差侦测、bsd及lca功能。第四实施例中,车辆40为公交车,且其长度为15m。
[0161]
车辆雷达系统4800可还包含侧边雷达装置4810,其设置于车辆的左侧 48l,侧边雷达装置4810及车辆雷达装置100中一者透过另一者与车辆40的车辆控制单元41通信连接。因此,有助于提升车辆雷达系统4800与车辆40 中车辆控制单元41等单元的通信效率。
[0162]
具体而言,车辆雷达系统4800包含三个侧边雷达装置,其为侧边雷达装置4810、4820及4830且操作频率皆约为79ghz,其中侧边雷达装置4810及 4820设置于车辆40的左侧48l,侧边雷达装置4830设置于车辆40的右侧48r。依据本发明的车辆雷达系统4800由其包含的车辆雷达装置100、侧边雷达装置4810、4820及4830可达成车辆40的内轮差侦测、rcta(rear cross traffic alert,后方车侧警示)、bsd及lca功能。进一步而言,车辆雷达装置100中的第二天线单元112及其相关元件可提供车辆40前半部的右方的侦测信息,以用于车辆40的内轮差侦测功能。侧边雷达装置4820及4830可分别提供车辆40的左后方及右后方的侦测信息,以用于车辆40的rcta功能。车辆雷达装置100、侧边雷达装置4810、4820及4830可提供车辆40的左方、右方、左后方及右后方的侦测信息,以用于车辆40的bsd及lca功能。再者,可以理解车辆雷达系统4800及其车辆雷达装置100、侧边雷达装置4810、4820及 4830的应用并不限于本段所述的功能。
[0163]
请参照第17图至第19图,其中第17图绘示第四实施例中侧边雷达装置 4810的示意图,第18图绘示依照第17图剖面线4d-4d的剖视图,第19图绘示第17图中侧边雷达装置4810的爆炸图。由第15图、第17图至第19图可知,侧边雷达装置4810包含电路板4816,且天线单元及运算单元(图未揭示且天线单元可为或不为电路板形式)皆设置于电路板4816,天线单元、运算单元及电路板4816皆设置在外壳4817中。侧边雷达装置4810设置于车辆40 的左侧48l,与右侧48r的车辆雷达装置100(特别是其中的第一天线单元111 及其相关元件)对应设置,且侧边雷达装置4810的电路板4816与侧边雷达装置4810所设置的车辆40的左侧48l的夹角w1为30度。此外,外壳4817包含底部4818,底部4818的外表面4819平行侧边雷达装置4810所设置的车辆 40的左侧48l,因此电路板4816与底部4818的外表面4819的夹角亦为30 度(第18图中省略其参数标号)。
[0164]
请参照第20图至第22图,其中第20图绘示第四实施例中侧边雷达装置 4810a的示意图,第21图绘示依照第20图剖面线4g-4g的剖视图,第22图绘示第20图中侧边雷达装置4810a的爆炸图。依据本发明的第四实施例中,车辆雷达系统4800中的侧边雷达装置4810可以侧边雷达装置4810a替代。由第15图、第20图至第22图可知,侧边雷达装置4810a包含电路
板4816a,且天线单元及运算单元(图未揭示且天线单元可为或不为电路板形式)皆设置于电路板4816a,天线单元、运算单元及电路板4816a皆设置在外壳4817a中。侧边雷达装置4810a设置于车辆40的左侧48l,与右侧48r的车辆雷达装置 100(特别是其中的第一天线单元111及其相关元件)对应设置,且侧边雷达装置4810a的电路板4816a与侧边雷达装置4810a所设置的车辆40的左侧48l 的夹角w1为30度。此外,外壳4817a包含底部4818a,底部4818a的外表面 4819a平行侧边雷达装置4810a所设置的车辆40的左侧48l,因此电路板4816a 与底部4818a的外表面4819a的夹角亦为30度。
[0165]
由第15图可知,车辆雷达装置100中的第二板部172与右侧48r的夹角 v2为30度,因此提供车辆40前半部的右方的侦测信息,以用于车辆40的内轮差侦测、bsd及lca功能。车辆雷达装置100中的第一板部171与右侧48r 的夹角v1为30度,因此提供车辆40后半部的右方的侦测信息,以用于车辆 40的bsd及lca功能。侧边雷达装置4810的电路板4816与左侧48l的夹角 w1为30度,因此提供车辆40后半部的左方的侦测信息,以用于车辆40的 bsd及lca功能。侧边雷达装置4820的电路板4826与左侧48l的夹角w2为40度,因此提供车辆40左后方的侦测信息,以用于车辆40的rcta、bsd及 lca功能。侧边雷达装置4830的电路板4836与右侧48r的夹角w3为40度,因此提供车辆40右后方的侦测信息,以用于车辆40的rcta、bsd及lca功能。此外,侧边雷达装置4810、4820及4830的天线单元可为或可不为电路板形式,且侧边雷达装置4820及4830的具体结构可近似侧边雷达装置4810 或4810a,惟夹角w2及w3皆为40度。
[0166]
由第15图及第16图可知,就车辆40侦测车外物体的功能而言,车辆40 包含车辆雷达系统4800、前侧雷达装置4710、后侧雷达装置4910。前侧雷达装置4710的操作频率约为77ghz且设置于车辆40的前侧47,可提供车辆 40前方的侦测信息,以用于车辆40的fcw(front collision warning,前方碰撞警示)及ldw(lane departure warning,车道偏移警示)功能。后侧雷达装置4910的操作频率约为77ghz且设置于车辆40的后侧49,可提供车辆 40后方的侦测信息,以用于车辆40的rcw(rear collision warning,后方碰撞警示)功能。车辆40亦包含车辆控制单元41、报警单元42、车载诊断单元43、摄影单元44及显示单元45,且车辆控制单元41以控制器区域网络 (controller area network,can)46与其他单元通信连接。
[0167]
在第四实施例的车辆雷达系统4800中,车辆雷达装置100及侧边雷达装置4810以私人控制器区域网络(private can)46p通信连接,侧边雷达装置 4820及4830以私人控制器区域网络46p通信连接。因此,使用私人控制器区域网络46p于特定雷达装置之间组成副网络以对传信息,再由车辆雷达装置 100、侧边雷达装置4810、4820及4830中固定一者或是由算法决定的其中一者作为车辆雷达系统4800中的主雷达装置(master radar device),以将车辆雷达装置100、侧边雷达装置4810、4820及4830的侦测信息传输至车辆 40的其他单元,可有效降低控制及侦测信息传输时过度占用控制器区域网络 46,而造成信息壅塞以致产生数据上的遗漏,故有助于提高车辆雷达系统4800 的可靠度。依据本发明的其他实施例中(图未揭示),车辆雷达系统可包含前侧雷达装置、后侧雷达装置、或是设置于车辆上其他位置的雷达装置,且雷达装置的数量、侦测方向及功能、通信连接方式并不以本发明实施例所揭露为限。
[0168]
车辆雷达系统4800的内轮差侦测模式、rcta模式、bsd模式及lca模式中一种模式
可透过车辆40的控制器区域网络46上的方向灯信号、方向盘产生的舵角信号、车速信号、点火信号、倒车信号、横摆角速度(yaw rate)信号中至少一者启动。
[0169]
车辆雷达系统4800的内轮差侦测模式可透过车辆40的方向灯信号、舵角信号及横摆角速度信号中至少一者触发或启动(activate)。进一步地,当车辆雷达系统4800于内轮差侦测模式时,车辆雷达系统4800可透过方向灯信号、舵角信号及横摆角速度信号中所述至少一者计算出车辆40的转弯信息,车辆雷达系统4800依据转弯信息适应性地调整车辆40的报警条件,其中报警条件包含报警区域范围、物体移动速度等,且不以此为限。因此,有利车辆40于各种转弯情况启动车辆雷达系统4800的内轮差侦测模式,并随着不同转角增加或减少适应性的警戒范围。具体而言,当车辆40被设定或辨识其于城市行驶且车速介于0km/h至40km/h时,车辆雷达系统4800的内轮差侦测模式透过车辆40的方向灯信号、舵角信号及横摆角速度信号中至少一者启动,表示车辆40的驾驶员意图地或非意图地转弯,若是判定意图转弯时可依雷达舵角信息调变警戒区域,避免不必要的警示或误报。当车辆雷达系统 4800中第二天线单元112及相关元件的侦测结果满足报警条件时,例如侦测范围内有高度30cm以上的移动物体或静止物体,即启动车辆40的报警单元 42产生报警信号以提醒车辆40的驾驶员,报警单元42可为扬声器、蜂鸣器、警笛、显示器、灯号指示器、图标(icon)指示器等,以由声、光等方式提醒驾驶员,但不以此为限。此外,当车辆雷达系统4800的内轮差侦测模式启动时,bsd模式及lca模式可同时启动或是仅有内轮差侦测模式启动,且内轮差侦测模式的报警信号优先于bsd模式及lca模式的报警信号。
[0170]
关于车辆雷达系统4800中的侧边雷达装置4820及4830应用于车辆40 的rcta功能,车辆雷达系统4800接收到倒车信号且车速信号小于或等于8 km/h可触发或启动rcta模式,当侧边雷达装置4820及4830中至少一者侦测到速度介于8km/h至30km/h之间的车辆或其他物体进入警示区(alert zone) 时,即启动报警单元42产生报警信号,其中警示区为车辆40的左后方警示区及右后方警示区,具体上左后方警示区可为左侧48l的左方0.5m的位置至10m的位置与后侧49的后方0m的位置至5m的位置所交集的方形区域,右后方警示区可为右侧48r的右方0.5m的位置至10m的位置与后侧49的后方0m的位置至5m的位置所交集的方形区域。再者,车辆雷达系统4800 接收到倒车信号且车速信号大于8km/h,或是手动关闭rcta模式时,则rcta 模式不启动或停止启动。
[0171]
关于车辆雷达系统4800中的车辆雷达装置100、侧边雷达装置4810、4820 及4830应用于车辆40的bsd及lca功能,车辆雷达系统4800接收到车速信号大于或等于20km/h可触发或启动bsd模式及lca模式,当车辆雷达装置 100、侧边雷达装置4810、4820及4830中至少一者侦测到与车辆40的相对速度小于30km/h的车辆或其他物体,由车辆40的后方超车进入侦侧区(detection zone)时为bsd模式,由车辆40的左后方或右后方进入侦侧区时为lca模式,其中侦侧区具体上可以左侧48l的左方0.5m的位置至3.25m 的位置为宽度,且车体长度延伸至车辆40的后方30m为长度的方形区域,以及以右侧48r的右方0.5m的位置至3.25m的位置为宽度,且车体长度延伸至车辆40的后方30m为长度的方形区域。当车辆雷达系统4800并无接收到车辆40的方向灯信号时即启动报警单元42产生第一段的报警信号,当车辆雷达系统4800同时接收到车辆40的方向灯信号时即启动报警单元42产生第二段的报警信号。再者,车辆雷达系统4800接收到车速信号小于20km/h 时,则bsd模式及lca模式不启动或停止启动。
[0172]
此外,关于前侧雷达装置4710应用于车辆40的fcw及ldw功能,前侧雷达装置4710侦测到车辆40与前方车辆之间为安全距离时,报警单元42中的图标指示器可以绿色显示车辆40处于安全状态。前侧雷达装置4710侦测到车辆40与前方车辆之间的距离过近时,报警单元42中的图标指示器可以黄色显示车辆40处于注意状态。前侧雷达装置4710侦测到车辆40与前方车辆之间有碰撞风险时,报警单元42中的图标指示器可以红色闪烁显示车辆40 处于危险状态,且报警单元42中的蜂鸣器发出警示音。再者,可由摄影单元 44对车道的识别,当前侧雷达装置4710侦测到车辆40偏离车道时透过报警单元42提醒驾驶员注意行车安全或是休息。
[0173]
关于后侧雷达装置4910应用于车辆40的rcw功能,后侧雷达装置4910 侦测到车辆40与后方车辆之间为安全距离时,报警单元42中的图标指示器可以绿色显示车辆40处于安全状态。后侧雷达装置4910侦测到车辆40与后方车辆之间的距离过近时,报警单元42中的图标指示器可以黄色闪烁显示车辆40处于注意状态。后侧雷达装置4910侦测到车辆40与后方车辆之间有碰撞风险时,报警单元42中的图标指示器可以红色闪烁显示车辆40处于危险状态,且报警单元42中的蜂鸣器及警笛皆发出警示音。
[0174]
请参照第23图,其绘示本发明第五实施例的车辆雷达系统5800设置于车辆50的示意图(未依实际比例绘示)。由第23图可知,车辆雷达系统5800 设置于车辆50,车辆雷达系统5800包含一个车辆雷达装置200a及一个车辆雷达装置200b,车辆雷达装置200a及200b分别设置于车辆50的左侧58l及右侧58r,且车辆雷达装置200a及200b中各者除了参数b1为40度且参数 b2为30度之外(参数b1的位置较参数b2的位置接近车辆的后侧59),车辆雷达装置200a及200b中各者的其他特征可与第二实施例中所述的车辆雷达装置200的特征相同。再者,车辆50的车体包含前侧57、左侧58l、右侧58r 及后侧59,且前侧57、左侧58l、右侧58r及后侧59本质上形成一方形,并如第23图所绘示。
[0175]
第五实施例中,车辆雷达装置200a包含第一天线单元、第二天线单元、运算单元及电路板。第一天线单元及第二天线单元与运算单元通信连接。电路板包含第一板部271a及第二板部272a,第一天线单元为电路板形式且设置于第一板部271a,第二天线单元为电路板形式且设置于第二板部272a,运算单元设置于第一板部271a及第二板部272a中一者。车辆雷达装置200b包含第一天线单元、第二天线单元、运算单元及电路板。第一天线单元及第二天线单元与运算单元通信连接。电路板包含第一板部271b及第二板部272b,第一天线单元为电路板形式且设置于第一板部271b,第二天线单元为电路板形式且设置于第二板部272b,运算单元设置于第一板部271b及第二板部272b 中一者。第五实施例中,车辆雷达装置200a及200b中各者的参数p12皆为 110度。
[0176]
由第23图可知,第一板部271a与车辆雷达装置200a所设置的车辆50 的左侧58l的夹角为v1a,第二板部272a与车辆雷达装置200a所设置的车辆 50的左侧58l的夹角为v2a,第一板部271b与车辆雷达装置200b所设置的车辆50的右侧58r的夹角为v1b,第二板部272b与车辆雷达装置200b所设置的车辆50的右侧58r的夹角为v2b。此外,参数v1a及v1b与本发明申请专利范围及说明书所述的参数v1的定义一致,参数v2a及v2b与本发明申请专利范围及说明书所述的参数v2的定义一致。第五实施例中,参数v1a为40 度,参数v2a为30度,参数v1b为40度,参数v2b为30度。再者,车辆雷达装置200a及200b中各者的参数ht皆约为28.9mm。
[0177]
第五实施例中,车辆雷达装置200a及200b中各者的第一天线单元具有足够的水平波束宽度(如第二实施例中的参数ah1)及足够的垂直波束宽度(如第二实施例中的参数av1),第二天线单元具有足够的水平波束宽度(如第二实施例中的参数ah2)及足够的垂直波束宽度(如第二实施例中的参数av2),有助于车辆雷达系统5800同时提升水平的平面及垂直平面的侦测范围。
[0178]
车辆50的长度为4m以上且8m以下,车辆雷达系统5800中的车辆雷达装置的数量为两个(即车辆雷达装置200a及200b),其中车辆雷达装置200a 设置于车辆50的左侧58l并邻近车辆50的后侧59(即邻近或位于车辆50的左后角落),车辆雷达装置200b设置于车辆50的右侧58r并邻近车辆50的后侧59(即邻近或位于车辆50的右后角落)。因此,当车辆50作为货车,特别是货车中的物流车,可达成车辆50的内轮差侦测、rcta、bsd及dow(door open warning,开门警示)功能。第五实施例中,车辆50为物流车,且其长度为6m。
[0179]
车辆雷达装置200a及200b中一者透过另一者与车辆50的车辆控制单元 (图未揭示)通信连接。因此,有助于提升车辆雷达系统5800与车辆50中车辆控制单元等单元的通信效率。具体而言,车辆雷达装置200a及200b以私人控制器区域网络通信连接,再由车辆雷达装置200a及200b中固定一者或是由算法决定的其中一者作为车辆雷达系统5800中的主雷达装置,以将车辆雷达装置200a及200b的侦测信息传输至车辆的其他单元。
[0180]
具体而言,车辆雷达装置200a及200b的操作频率皆约为79ghz,依据本发明的车辆雷达系统5800由其包含的车辆雷达装置200a及200b可达成车辆50的内轮差侦测、rcta、bsd及dow功能。进一步而言,车辆雷达装置200a 中第二板部272a(与左侧58l的夹角v2a为30度)上的第二天线单元及其相关元件可提供车辆50前半部的左方的侦测信息,车辆雷达装置200b中第二板部272b(与右侧58r的夹角v2b为30度)上的第二天线单元及其相关元件可提供车辆50前半部的右方的侦测信息,以用于车辆50的内轮差侦测功能。车辆雷达装置200a中第一板部271a(与左侧58l的夹角v1a为40度)上的第一天线单元及其相关元件可提供车辆50的左后方及后方的侦测信息,车辆雷达装置200b中第一板部271b(与右侧58r的夹角v1b为40度)上的第一天线单元及其相关元件可提供车辆50的右后方及后方的侦测信息,以用于车辆50 的rcta及dow功能。车辆雷达装置200a及200b可提供车辆50的左方、右方、左后方、右后方及后方的侦测信息,以用于车辆50的bsd功能。再者,可以理解车辆雷达系统5800及其车辆雷达装置200a及200b的应用并不限于本段所述的功能。
[0181]
由第23图可知,就车辆50侦测车外物体的功能而言,车辆50包含车辆雷达系统5800及前侧雷达装置5710。前侧雷达装置5710的操作频率约为77 ghz且设置于车辆50的前侧57,可提供车辆50前方的侦测信息,以用于车辆50的fcw及ldw功能。
[0182]
关于车辆雷达系统5800及前侧雷达装置5710应用于车辆50的内轮差侦测、rcta、bsd、fcw及ldw功能,可与第四实施例所述内容相同或可依使用需求调整,故第五实施例中不再详述。
[0183]
虽然本发明已以实施方式揭露如上,然其并非用以限定本发明,任何熟习此技艺者,在不脱离本发明的精神和范围内,当可作各种的更动与润饰,因此本发明的保护范围当视后附的申请专利范围所界定者为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1