多旋翼无人机的飞控系统和多旋翼无人机的制作方法
1.本公开涉及无人机领域,具体地,涉及一种多旋翼无人机的飞控系统和多旋翼无人机。
背景技术:
2.飞控系统是无人机完成起飞、空中飞行、执行任务和返场回收等整个飞行过程的核心系统。无人机在飞行的过程中,飞控系统会受到各种激励载荷的作用而产生振动,这些振动会使得飞控系统中的元器件松动甚至损坏,从而影响飞控系统的性能,这会使得无人机的飞行变得不可控,甚至发生炸机现象。例如,对于多旋翼无人机来说,激励载荷包括旋翼激励载荷、发动机和电机等的激励载荷以及外界飞行环境中所施加的激励载荷等。其中,旋翼激励载荷所引起的高频振动是飞控系统所受到的高频振动中的主要部分。
3.现有技术中,通常在飞控系统中设计减振结构从隔振的角度来降低振动能量,这种减振结构通常是采用较软的材料将飞控系统中的传感器部分隔开,通过材料变形来吸收振动能量,从而达到减振的目的。
4.然而,这种减振结构的固有频率较低,不仅对低频振动(飞控系统起到控制和导航等作用所需的真实的低频振动)也有减振的作用,而且会降低飞控系统结构的稳定性,外界的小扰动就会引起飞控系统产生较大的相应(例如发生共振现象),这都极其容易造成无人机失控,因而存在较大的安全隐患。
技术实现要素:
5.本公开的目的是提供一种多旋翼无人机的飞控系统,该飞控系统能够兼顾减振效果和控制性能。
6.为了实现上述目的,本公开提供一种多旋翼无人机的飞控系统,其特征在于,所述飞控系统包括:
7.传感器单元,该传感器单元用于采集激励载荷频率ω信号,其中,所述传感器单元所采集的信号包括低频信号和高频信号,所述低频信号为所述飞控系统所需的控制信号,所述高频信号包括所述多旋翼无人机的旋翼施加给所述飞控系统的旋翼激励载荷频率信号;减振单元,所述减振单元由阻振件和配重块组成,所述传感器单元固定于所述配重块;以及,限位件,该限位件具有弹性,并且所述限位件的刚度和阻尼比均小于所述阻振件;其中,所述限位件、所述配重块和所述阻振件沿纵向依次层叠并且其中相邻的两者彼此连接;其中,所述阻振件和所述配重块配置为使得所述减振单元的固有频率高于所述低频信号且低于所述高频信号,并且,所述减振单元对于所述低频信号的放大因子β为1.0~1.2,且所述减振单元对于所述高频信号的放大因子β小于0.5。
8.可选地,所述激励载荷频率与所述减振单元的固有频率之比s、所述减振单元的放大因子β和所述阻振件的阻尼比ζ之间的关系满足下列公式:
[0009][0010]
其中,所述固有频率的取值范围为60hz~70hz,,所述阻振件的阻尼比ζ的取值范围为0.2~0.3。
[0011]
可选地,所述放大因子β,所述阻振件的阻尼比ζ、刚度k,所述配重块的质量m以及激励载荷频率ω之间的关系满足下列公式:
[0012][0013]
其中,所述阻振件的阻尼比ζ的取值范围为0.2~0.3,所述阻振件的刚度的取值范围k为1.1n/mm~2.0n/mm,所述配重块的质量m的取值范围为8g~10g。
[0014]
可选地,所述低频信号的范围为0~20hz,所述高频信号的范围为110hz~500hz。
[0015]
可选地,所述限位件的阻尼比不大于所述阻振件的阻尼比的0.2倍,所述限位件的刚度不大于所述阻振件的刚度的0.15倍。
[0016]
可选地,所述限位件构造为由泡棉材料制成的隔垫。
[0017]
可选地,所述飞控系统包括控制器单元,该控制器单元包括控制器主体和壳罩,所述控制器主体与所述控制器主体通信连接且适于固定于所述多旋翼无人机的机身或机架,所述控制器主体形成有基座,所述基座和所述壳罩限定所述封闭空间,所述限位件间隙配合在所述壳罩中,所述阻振件连接在所述基座上。
[0018]
可选地,所述壳罩的内侧壁形成有环形的内台阶结构,该内台阶结构包括彼此成角度的内台面和内阶面,所述内台面界定所述壳罩的大内径部分和小内径部分,所述内阶面对应于所述小内径部分,并且所述内阶面与所述壳罩的内顶壁连接以围成限位槽,所述限位件的一部分间隙配合地容纳在所述限位槽中。
[0019]
可选地,所述基座形成有容纳槽,所述阻振件的一部分过盈配合地容纳于所述容纳槽中,并且所述阻振件的第二连接面粘接于所述容纳槽的底壁面。
[0020]
可选地,所述传感器单元包括pcb板和传感器组件,所述pcb板具有正面和反面,所述传感器组件固定于所述pcb板的正面,所述pcb板与所述控制器单元通信连接,所述pcb板固定于所述配重块,其中,所述pcb板的横向尺寸小于所述配重块的横向尺寸,所述配重块的横向尺寸小于所述阻振件的横向尺寸且小于所述限位件的横向尺寸。
[0021]
可选地,所述配重块具有彼此相对的第一固定面和第二固定面,所述限位件粘接于所述第一固定面,所述pcb板的正面与所述配重块的第二固定面相贴合并通过紧固件彼此连接,所述传感器组件位于所述配重块的第一避让孔中或者穿过所述第一避让孔且位于所述限位件的第二避让孔中,所述配重块的第二固定面与所述阻振件的第一连接面粘接。
[0022]
根据本公开的第二个方面,所述多旋翼无人机包括如上所述的多旋翼无人机的飞控系统。
[0023]
通过上述技术方案,在本公开提供的多旋翼无人机的飞控系统中,当低频激励传递给阻振件时,通过阻振件与配重块的配合能够被基本上还原,并传递给固定于配重块的
传感器单元,从而使得传感器单元感知无人机所发生的真实的飞行状况(例如晃动),即:使得传感器单元采集的加速度、角度等信号基本上真实。当高频激励传递给阻振件时,通过阻振件与配重块的配合能够衰减其振动频率,即阻振件能够提供阻力并耗减振动能量,由此显著地降低传递至传感器单元的振动的能量,有益于保持传感器单元的结构稳定和性能稳定。此外,减振单元的固有频率设计为高于低频激励且低于高频激励的频率,例如,减振单元的固有频率设计为高于飞机悬停时旋翼(也称为螺旋桨)一倍频且低于二倍频,可以使得飞控系统的结构不再会容易地出现共振,从而能够保证传感器单元结构上的可靠性和性能上的稳定性。基于此,本公开提供的多旋翼无人机包括了上述飞控系统,可以平稳地飞行,并且做出敏捷的反应。
[0024]
本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
[0025]
附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
[0026]
图1是根据本公开提供的多旋翼无人机的飞控系统的一种实施例的立体示意图;
[0027]
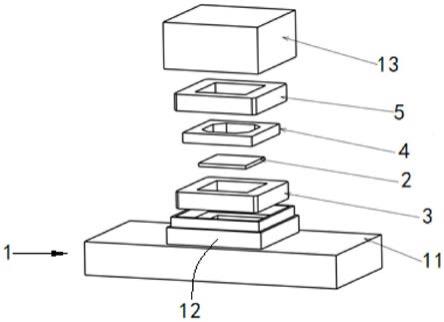
图2是根据本公开提供的多旋翼无人机的飞控系统的一种实施例的立体爆炸示意图;
[0028]
图3是根据本公开提供的多旋翼无人机的飞控系统的一种实施例的俯视示意图;
[0029]
图4是沿图3中a-a线的剖视示意图;
[0030]
图5是沿图3中a-a线的剖切的剖视爆炸示意图;
[0031]
图6是沿图3中b-b线的剖视示意图;
[0032]
图7是沿图3中b-b线的剖切的剖视爆炸示意图;
[0033]
图8是根据本公开提供的多旋翼无人机的飞控系统的一种实施例下的振动曲线图。
[0034]
附图标记说明
[0035]
1-控制器单元,11-控制器主体,12-基座,120-容纳槽,121-第四避让孔,122-底壁,123-外台面,124-外阶面,125-基座外周面,13-壳罩,130-内顶壁,131-罩口端面,132-罩口内壁面,133-内台面,134-内阶面,135-壳罩外周面;
[0036]
2-pcb板,21-正面,22-反面;
[0037]
3-阻振件,30-第三避让孔,31-第一连接面,32-第二连接面,33-第一外周面;
[0038]
4-配重块,40-第一避让孔,41-第一固定面,42-第二固定面;
[0039]
5-限位件,50-第二避让孔,51-第一配合面,52-第二配合面,53-第二外周面。
具体实施方式
[0040]
以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
[0041]
在本公开中,在未作相反说明的情况下,使用的方位词如“上、下”通常是指相应附图中图面上的上、下,当无人机处于飞行状态时,“上、下”是指重力方向上的上、下,“内、外”是指相对于各部件自身轮廓而言的内、外。此外,在本公开中使用的序词“第一”、“第二”仅
用于区分不同的要素并不指代顺序性和重要性。
[0042]
根据本公开的具体实施方式,提供一种多旋翼无人机的飞控系统,包括:传感器单元,该传感器单元用于采集激励载荷频率ω信号,所述传感器单元所采集的信号包括低频信号和高频信号,所述低频信号为所述飞控系统所需的控制信号,所述高频信号包括所述多旋翼无人机的旋翼施加给所述飞控系统的旋翼激励载荷频率信号;以及,减振单元,所述减振单元由阻振件3和配重块4组成,所述传感器单元固定于所述配重块4;以及,限位件5,该限位件5具有弹性,并且所述限位件5的刚度和阻尼比均小于所述阻振件;其中,所述限位件5、所述配重块4和所述阻振件3位于飞控系统的封闭空间中并沿纵向依次层叠,且其中相邻的两者彼此连接;其中,所述阻振件3和所述配重块4配置为使得所述减振单元的固有频率高于所述低频信号且低于所述高频信号,并且,所述减振单元对于所述低频信号的放大因子β为1.0~1.2,且所述减振单元对于所述高频信号的放大因子β小于0.5。
[0043]
无人机飞行的过程中,在各种激励载荷的作用下,无人机会发生抖动和/或晃动。基于姿态、速度等的控制需求和飞行的导航需求,飞控系统中的传感器单元需要感知低频激励并在其状态下采集例如三相加速度、三相角度等信号,并将这些信号传递给飞控系统中的控制器单元1,控制器单元1根据这些信号分析无人机的当前状态,从而根据指令进行下一步的控制操作。因此,减振单元需要尽可能地将这种低频激励保真地传递给传感器单元,从而使得飞控系统掌握无人机当前的真实状态,以便于对无人机进行精准地控制,从而使得无人机能够平稳飞行,同时能够对相关操作指令做出敏捷的反应。
[0044]
本公开提供的多旋翼无人机的飞控系统中减振单元便是为此而设计。在上述的技术方案中,当低频激励传递给阻振件3时,通过阻振件3与配重块4的配合能够被基本上还原,并传递给固定于配重块4的传感器单元(参考附图标记2),从而使得传感器单元感知无人机真实的飞行状况(例如晃动),即:使得传感器单元采集的加速度、角度等信号基本上真实。当高频激励传递给阻振3时,通过阻振件3与配重块4的配合能够衰减其振动频率,即阻振件3能够提供阻力并耗减振动能量,由此显著地降低传递至传感器单元的振动的能量,有益于保持传感器单元的结构稳定和性能稳定。此外,减振单元的固有频率设计为高于低频激励且低于高频激励的频率,例如,减振单元的固有频率设计为高于飞机悬停时旋翼(也称为螺旋桨)一倍频且低于二倍频,可以使得飞控系统的结构不再会容易地出现共振,从而能够保证传感器单元结构上的可靠性和性能上的稳定性。
[0045]
换言之,在上述技术方案中,飞控系统中的阻振件3和限位件5以及两者之间的配重块4和传感器单元构成“三明治”结构,在这种结构中,阻振件3和限位件5的不对称阻尼和刚度的设计以及由此限定的放大因子使得整个飞控系统能够获得所需的针对传感器单元的减振效果-即还原低频、过滤高频,这样,一方面能够使得飞控系统掌握无人机的真实飞行状况,另一方面能够尽可能地保证飞控系统自身结构的可靠性。并且,限位件5和阻振件3这种一上一下的结构设计使得整个三明治结构能够稳定地保持在封闭空间中,且限位件能够为配重块及其上固定的传感器单元提供防碰的保护作用。
[0046]
在本公开提供的具体实施方式中,从机械振动学的角度分析,所述激励载荷频率与所述减振单元的固有频率之比s、所述减振单元的放大因子β和所述阻振件的阻尼比ζ之间的关系满足下列公式:
[0047][0048]
其中,所述固有频率的取值范围为60~70hz,所述阻振件的阻尼比ζ的取值范围为0.2~0.3。
[0049]
其中,根据机械振动学能够知晓固有频率s与阻振件3的刚度k和配重块4的质量m之间的关系,即刚度和配重相互配合能够调整固有频率s。因此,在本公开的具体实施方式中,所述放大因子β,所述阻振件3的阻尼比ζ、刚度k,所述配重块4的质量m以及激励载荷频率ω之间的关系满足下列公式:
[0050][0051]
其中,所述阻振件3的阻尼比ζ的取值范围为0.2~0.3。所述阻振件3的刚度设计至少需要满足的是最小需要保证2.5倍的配重块质量压上去不能压坏,例如其取值范围k可以为1.1n/mm~2.0n/mm。所述配重块4的质量m的取值范围为8g~10g。
[0052]
在本公开提供的具体实施方式中,低频信号的取值区间与高频信号的取值空间与无人机的整体结构设计有关。例如在减振单元的固有频率为60~70hz的实施例中,所述低频信号的范围可以为0~20hz,所述高频信号的范围可以为110hz~500hz。
[0053]
图8示出了本公开提供的多旋翼无人机的飞控系统的一种实施例下的振动曲线图,其中,减振单元的固有频率为65hz,阻振件3的阻尼比ζ为0.2。参考图8所示,可以看出的是,在0~20hz的低频信号内减振单元的放大因子为1~1.2左右,这说明减振单元对低频激励几乎没有作用,可以真实地将其传递给传感器单元。在115hz~120hz的高频信号内减振单元的放大因子小于0.5,这说明减振效果明显。
[0054]
在本公开提供的具体实施方式中,飞控系统包括控制器单元1,该控制器单元1包括控制器主体11,控制器主体11与所述控制器主体11通信连接且适于固定于所述多旋翼无人机的机身或机架。基于此,为了提高结构的可靠性,参考图1和图2所示,所述控制器主体11形成有基座12,所述控制单元包括壳罩13,其中,所述基座12和所述壳罩13限定上述的封闭空间,参考图4和图6所示,所述限位件5间隙配合在所述壳罩13中,所述阻振件3连接在所述基座12上。由此,在基座11和壳罩13提供的封闭空间中,由限位件5、配重块4和阻振件3以及固定在配重块4上的传感器单元组成一个整体结构,该整体结构在下端通过阻振件3固定于基座12,在上端通过限位件与壳罩间隙配合,上述的整体结构在上侧和下侧通过这种配合结构能够获得更好的稳定性,由此也能够保证减振单元的稳定性。从安装操作和限位功能两方面的考虑,上侧的限位件5间隙配合在壳罩13中,能够防止装配操作中限位件5被压缩从而影响减振单元的固有频率。
[0055]
其中,为了尽可能地降低甚至避免对减振单元的固有频率影响,限位件5设计为不需要具备减振缓冲功能,可选择地,所述限位件5构造为由泡棉材料制成的隔垫,所述泡棉材料的刚度和阻尼比均小于所述阻振件3。在本公开提供的一些具体实施方式中,阻振件3可以构造为由另一种不同的泡棉材料制成的垫块,那么,限位件5所使用的泡棉材料要比阻振件3所使用的泡棉材料软,甚至软很多,可选择地,限位件5所使用的泡棉材料的阻尼比不
大于阻振件3所使用的泡棉材料的阻尼比的0.2倍、刚度不大于阻振件3所使用的泡棉材料的刚度的0.15倍,例如,若阻振件3所使用的泡棉材料的阻尼比为上述的0.2~0.3、刚度为上述的1.1n/mm~2.0n/mm,那么限位件5所使用的泡棉材料的阻尼比则为0.04~0.06、刚度为0.1n/mm~0.3n/mm。
[0056]
在本公开提供的具体实施方式中,限位件5与壳罩13之间的配合结构可以以任意合适的方式构造。可选择地,参考图5和图7所示,所述壳罩13的内侧壁形成有环形的内台阶结构,该内台阶结构包括彼此成角度的内台面133和内阶面134,所述内台面133界定所述壳罩13的大内径部分和小内径部分,所述内阶面134对应于所述小内径部分,并且所述内阶面134与所述壳罩13的内顶壁连接以围成限位槽,所述限位件5的一部分间隙配合地容纳在所述限位槽中。通过限位件5与限位槽的配合,能够在所述整体结构的上侧建立与壳罩13的关系,有益于保持上述整体结构的可靠性。此外,考虑到激励载荷也会引起配重块4和传感器单元在横向上的运动,限位件5并未全部容纳在限位槽中,以免在上侧对配重块4的和传感器单元构成横向上的限制和约束。这里,为了避免影响减振器单元的固有频率,理想的是,在激励载荷为零的情况下,限位件5的上表面(即第一配合面51)与壳罩13的内顶壁130之间恰好贴合。
[0057]
在本公开提供的具体实施方式中,阻振件3与基座12之间的配合结构可以以任意合适的方式构造。可选择地,参考图5和图7所示,所述基座12形成有容纳槽120,所述阻振件3的一部分过盈配合地容纳于所述容纳槽120中,并且所述阻振件3的第二连接面32粘接于所述容纳槽120的底壁面。通过阻振件3也只需要部分地过盈配合在容纳槽120中以实现安装和固定即可,需要通过暴露于容纳槽120的部分允许配重块4和传感器单元在横向上的运动。这里的“过盈配合”可以体现在阻振件3的外周面,即第一外周面33,与容纳槽120的侧壁过盈配合,参考图5至图7中所示。
[0058]
在本公开提供的具体实施方式中,传感器单元可以以任意合适的方式构造。可选择地,参考图4至图7所示,所述传感器单元可以包括pcb板2和传感器组件,所述pcb板2具有正面21和反面22,所述传感器组件固定于所述pcb板2的正面,所述pcb板2与所述控制器单元1通信连接,所述pcb板2固定于所述配重块4。其中,为了避免配重块和传感器单元在横向运动的过程中撞击壳罩13,所述pcb板2的横向尺寸需要小于所述配重块4的横向尺寸,所述配重块4的横向尺寸需要小于所述阻振件3的横向尺寸且小于所述限位件的横向尺寸。
[0059]
在本公开提供的具体实施方式中,上述的整体结构之间的连接可以以合适的方式构造。可选择地,为了保证配重块4与限位件5之间连接的可靠性,所述配重块4具有彼此相对的第一固定面41和第二固定面42,所述限位件5粘接于所述第一固定面41。所述配重块4的第二固定面42与所述阻振件3的第一连接面31粘接。这里两处采用粘接而不是通过其它连接件实现连接的方式,有益于降低整个飞控系统的重量。这里,限位件5可以具有下表面,即第二配合面52,参考图5至图7所示,第二配合面52与第一固定面41面贴合地粘接,从而增大连接面积,以此增大连接强度和可靠性。
[0060]
这里,pcb板2与配重块4之间的可靠连接可以通过其它的连接件实现,可选择地,所述pcb板2的正面21与所述配重块4的第二固定面42相贴合并通过紧固件彼此连接。其中,为了避免对pcb板2上的传感器组件造成结构干涉,所述配重块4的中心开设有第一避让孔40,所述限位件5的中心开设有第二避让孔50,一些较矮所述传感器组件可以位于所述配重
块4的第一避让孔40中,另一些较高的所述传感器组件可以穿过所述第一避让孔40且位于所述第二避让孔50中。
[0061]
基于阻振件的具体装配方式,可以在阻振件3和基座12上开孔以实现pcb板与控制器主体之间的连线。参考图4至图5所示,所述阻振件3形成有第三避让孔30,所述容纳槽120的底壁122开设有第四避让孔121,所述pcb板2位于所述第三避让孔30中,所述第三避让孔30和第四避让孔121适于供连接所述pcb板2和所述控制器主体11之间的导线穿过,同时也有益于小型化和轻量化设计。在此需要说明的是,基座12上所开设的第四避让孔121在图中示意为槽状,但应理解为连通控制器主体11内部的通孔结构。
[0062]
此外,在本公开提供的具体实施方式中,基座12和外罩13之间的配合方式也可以以任意合适的方式构造。可选择地,在上述的整体结构装配到基座12上之后,外罩13以包围封装的方式罩盖在基座12上。参考图5和图7所示,在所述基座12的基座外周面125上形成有环形的外台阶结构,该外台阶结构包括彼此成角度的外台面123和外阶面124,所述外阶面124伸入到所述壳罩13的罩口中,并且所述壳罩13的罩口端面131抵接于所述外台面123,所述壳罩13的罩口内壁面132贴合于所述外阶面124。在此,参考图5和图7中所示,限位件5的外周面,即第二外周面53,与罩口内壁面132间隙配合。
[0063]
其中,外罩13可以以任意合适的方式固定于基座12,例如可以通过紧固件(如螺钉)或卡接等方式连接,可选择地,所述外台面123与所述罩口端面131相粘接,所述外阶面124与所述罩口内壁面132相粘接,这种粘接可以避免使用紧固件所带来的重量增加问题。
[0064]
此外,所述基座外周面125与所述壳罩13的壳罩外周面135在所述罩口端面131与所述外台面123的对接处平滑过渡,这有益于控制重量,避免材料剩余,且有利于外观的美观性。
[0065]
另外,需要说明的是,虽然在附图中显示各部件的形状为方形,但在本公开提供的具体实施方式中并不限制上述各部件的形状,各部件的形状可以根据实际需求进行设计。
[0066]
在上述技术方案的基础上,本公开还提供一种多旋翼无人机,该多旋翼无人机包括上述的多旋翼无人机的飞控系统。基于这种飞控系统对于低频激励的精确感知,多旋翼无人机能够平稳地飞行且飞行状况能够被精确地控制,对于速度和/或姿态和/或高度等的改变也能够做出敏捷地应。
[0067]
其中,在一些实施方式中,为了保持飞机的平衡,飞控系统安装在多旋翼无人机的机身的中心位置。
[0068]
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
[0069]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
[0070]
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1