发送装置、控制系统、以及发送方法与流程
[0001]
本公开涉及发送装置、控制系统、以及发送方法。
背景技术:
[0002]
作为对周围的状况进行感测的方法,例如有利用相机等来检测周围的光的方法、以及向周围照射光、红外线、超声波等,从而对反射的光、红外线、超声波等进行检测的方法等。并且,近些年提出了利用电波来对周围的状况进行感测的方式。
[0003]
(现有技术文献)
[0004]
(非专利文献)
[0005]
非专利文献1 s.schuster,s.scheiblhofer,r.feger,and a.stelzer,“signal model and statistical analysis for the sequential sampling pulse radar technique,”in proc.ieee radar conf,2008,pp.1-6,2008
[0006]
非专利文献2 d.cao,t.li,p.kang,h.liu,s.zhou,h.su,“single-pulse multi-beams operation of phased array radar”,2016 cie international conference on radar(radar),pp.1-4,2016
[0007]
非专利文献3 a.bourdoux,k.parashar,and m.bauduin,“phenomenology of mutual interference of fmcw and pmcw automotive radars,”in 2017 ieee radar conference(radar conf.),pp.1709-1714,2017
[0008]
非专利文献4 j.fink,f.k.jondral,“comparison of ofdm radar and chirp sequence radar,”in 2015 16th international radar symposium(irs),pp.315-320,2015
[0009]
利用空间的感测的目的、用途、利用环境逐步变得多样化。
技术实现要素:
[0010]
于是,本公开提供一种能够进行周围的感测的发送装置以及发送方法。
[0011]
本公开的一个形态中的发送装置具备:帧构成部,构成基于ofdma方式且包括多个时间频率资源的帧,所述时间频率资源是由时间以及频率规定的资源,所述ofdma是指,orthogonal frequency-division multiple access即正交频分多址;以及发送部,将由所述帧构成部构成的所述帧,通过电波发送,所述帧构成部,将包括通信用资源和感测用资源的帧作为所述帧来构成,所述通信用资源是配置包括通信数据的码元的时间频率资源,所述感测用资源是配置用于通过电波的感测的码元的时间频率资源,所述电波是由所述发送部发送的电波。
[0012]
另外,这些概括性或具体的形态可以通过系统、方法、集成电路、计算机程序或者计算机可读取的cd-rom等记录介质来实现,也可以通过系统、方法、集成电路、计算机程序以及记录介质的任意的组合来实现。
[0013]
本公开的发送装置能够进行周围的感测。
附图说明
[0014]
图1是示出实施方式1中的检测装置的构成的一个例子的图。
[0015]
图2是示出实施方式1中的检测装置的构成的一个例子的图。
[0016]
图3是示出实施方式1中的检测装置的构成的一个例子的图。
[0017]
图4是示出实施方式1中的检测装置的构成的变形例的图。
[0018]
图5是示出实施方式1中的检测装置的构成的变形例的图。
[0019]
图6是示出实施方式1中的检测装置的构成的变形例的图。
[0020]
图7是示出实施方式1中的检测装置的分离的构成的一个例子的图。
[0021]
图8是示出实施方式1中的检测装置的分离的构成的一个例子的图。
[0022]
图9是示出实施方式1中的检测装置的分离的构成的一个例子的图。
[0023]
图10是示出实施方式1中的检测装置的分离的构成的一个例子图。
[0024]
图11是示出实施方式2中的装置的状态的一个例子的图。
[0025]
图12是示出实施方式2中的帧的结构的一个例子的图。
[0026]
图13是示出实施方式2中的帧的结构的一个例子的图。
[0027]
图14是示出实施方式3中的装置的构成的一个例子的图。
[0028]
图15是示出实施方式3中的装置的构成的一个例子的图。
[0029]
图16是示出实施方式3中的装置的构成的一个例子的图。
[0030]
图17是示出实施方式4中的系统构成的一个例子的图。
[0031]
图18是示出实施方式4中的装置的构成的一个例子的图。
[0032]
图19是示出实施方式4中的帧的结构的一个例子的图。
[0033]
图20是示出实施方式4中的帧的结构的一个例子的图。
[0034]
图21是示出实施方式4中的帧的结构的一个例子的图。
[0035]
图22是示出实施方式4中的帧的结构的一个例子的图。
[0036]
图23是示出实施方式4中的帧的结构的一个例子的图。
[0037]
图24是示出实施方式4中的帧的结构的一个例子的图。
[0038]
图25是示出实施方式4中的帧的结构的一个例子的图。
[0039]
图26是示出实施方式4中的帧的结构的一个例子的图。
[0040]
图27是示出实施方式4中的帧的结构的一个例子的图。
[0041]
图28是示出实施方式4中的帧的结构的一个例子的图。
[0042]
图29是示出实施方式4中的帧的结构的一个例子的图。
[0043]
图30是示出实施方式4中的帧的结构的一个例子的图。
[0044]
图31是示出实施方式4中的帧的结构的一个例子的图。
[0045]
图32是示出实施方式4中的帧的结构的一个例子的图。
[0046]
图33是示出实施方式4中的帧的结构的一个例子的图。
[0047]
图34是示出实施方式4中的帧的结构的一个例子的图。
[0048]
图35是示出实施方式4中的帧的结构的一个例子的图。
[0049]
图36是示出实施方式4中的帧的结构的一个例子的图。
[0050]
图37是示出实施方式4中的帧的结构的一个例子的图。
[0051]
图38是示出实施方式5中的控制系统的构成的一个例子的图。
[0052]
图39是示出实施方式5中的控制系统的构成的一个例子的图。
[0053]
图40是示出实施方式5中的控制系统的外观的一个例子的图。
[0054]
图41是示出实施方式5中的控制系统的处理的一个例子的图。
[0055]
图42是示出实施方式6中的发送装置的构成的一个例子的图。
[0056]
图43是示出实施方式6中的发送装置的处理的一个例子的图。
[0057]
图44是示出实施方式7中的装置的构成的一个例子的图。
[0058]
图45是示出实施方式7中的装置与人的关系的一个例子的图。
[0059]
图46是示出实施方式7中的人与终端与装置的状态的一个例子的图。
[0060]
图47是示出实施方式7中的人与终端与装置的状态的一个例子的图。
[0061]
图48是示出实施方式7中的装置与终端与人的关系的一个例子的图。
[0062]
图49是示出实施方式7中的装置与终端与人的关系的一个例子的图。
[0063]
图50是示出实施方式8中的各装置的状态的一个例子图。
[0064]
图51是在实施方式8中的住宅内设置了ap时的工作例的流程图。
[0065]
图52是实施方式8中的ap的工作例的流程图。
[0066]
图53是实施方式8中的系统的工作例的流程图。
[0067]
图54是实施方式8中的ap、云服务器的工作例的流程图。
[0068]
图55是示出实施方式9中的各装置的状态的一个例子的图。
[0069]
图56是在实施方式9中的住宅内设置了ap时的工作例的流程图。
[0070]
图57是实施方式9中的ap的工作例的流程图。
[0071]
图58是实施方式9中的系统的工作例的流程图。
[0072]
图59是实施方式9中的ap、云服务器的工作例的流程图。
[0073]
图60是示出实施方式10中的系统的构成的一个例子的图。
[0074]
图61是示出实施方式10中的系统的构成的一个例子图。
[0075]
图62是示出实施方式10中的系统的构成的一个例子图。
[0076]
图63是示出实施方式10中的系统的构成的一个例子的图。
[0077]
图64是示出各实施方式中的感测的方法的图。
[0078]
图65是示出各实施方式中的感测的方法的图。
[0079]
图66是各实施方式中的利用三角测量而进行的的位置的测量或者估计的说明图。
具体实施方式
[0080]
本发明的一个形态所涉及的发送装置具备:帧构成部,构成基于ofdma方式且包括多个时间频率资源的帧,所述时间频率资源是由时间以及频率规定的资源,所述ofdma是指,orthogonal frequency-division multiple access即正交频分多址;以及发送部,将由所述帧构成部构成的所述帧,通过电波发送,所述帧构成部,将包括通信用资源和感测用资源的帧作为所述帧来构成,所述通信用资源是配置包括通信数据的码元的时间频率资源,所述感测用资源是配置用于通过电波的感测的码元的时间频率资源,所述电波是由所述发送部发送的电波。
[0081]
通过上述形态,发送装置能够通过发送部来进行利用了电波的通信、以及利用了电波的发送装置的周围的物体的感测。具体而言,发送装置能够利用被配置在发送部通过
电波发送的帧内的通信用资源来进行通信,并且,能够利用被配置在该帧内的感测用资源来进行感测。据此,发送装置能够进行周围的感测。
[0082]
例如也可以是,所述帧至少包括时间不同而频率相同的2个感测用资源,且所述2个感测用资源在时间方向上以夹着防护区间的方式而相邻配置。
[0083]
通过上述形态,发送装置通过在帧内的2个感测用资源之间设置防护区间,从而能够回避该2个感测用资源的干扰,并能够进一步进行恰当的发送装置的周围的感测。据此,发送装置能够进一步进行恰当的周围的感测。
[0084]
例如也可以是,所述帧包括2个防护区间,所述2个防护区间的时间长度不同,且频率不同。
[0085]
通过上述形态,发送装置能够在帧内的彼此不同的频率设定时间长度不同的防护区间。据此,由于能够按照频率来灵活地设置防护区间,因此能够回避该2个感测用资源的干扰,并能够进一步进行恰当的发送装置的周围的感测。因此,发送装置能够进行更恰当的周围的感测。
[0086]
例如也可以是,所述帧至少包括2个感测用资源,所述2个感测用资源的频率不同,且时间长度不同。
[0087]
通过上述形态,发送装置能够在帧内,在彼此不同的频率配置时间长度不同的2个感测用资源。据此,由于能够按照频率来灵活地配置感测用资源,因此能够回避该2个感测用资源的干扰,并且能够进一步进行恰当的发送装置的周围的感测。因此,发送装置能够进行更恰当的周围的感测。
[0088]
例如也可以是,所述发送装置进一步具备:接收部,接收由所述发送部发送的所述电波的反射波;以及处理部,通过对所述接收部接收的所述反射波进行解析,来执行感测处理。
[0089]
通过上述形态,发送装置能够接收被发送的电波的反射波,并能够进行解析。因此,发送装置能够得到发送装置的周围的感测结果。
[0090]
例如也可以是,所述感测处理至少包括,通过对所述接收部接收的所述反射波进行解析,从而对物体的位置进行检测的处理、对物体的有无进行检测的处理、或对物体的外形进行检测的处理。
[0091]
通过上述形态,发送装置通过对物体的位置进行检测的处理、对物体的有无进行检测的处理、或对物体的外形进行检测的处理,从而能够更容易地得到发送装置的周围的感测结果。
[0092]
例如也可以是,所述发送装置进一步包括控制部,该控制部根据由所述处理部进行的所述感测处理的结果,来对电气设备的驱动进行控制。
[0093]
通过上述形态,发送装置能够根据发送装置的周围的感测结果,来控制电气设备的驱动。据此,能够利用周围的感测的结果,来对电气设备的驱动进行控制。
[0094]
并且,本发明的一个形态所涉及的控制系统具备上述的发送装置、以及所述发送装置的所述控制部进行的控制来驱动的所述电气设备。
[0095]
通过上述形态,控制系统能够实现与上述发送装置同样的效果。
[0096]
并且,本发明的一个形态所涉及的发送方法包括:帧构成步骤,构成基于ofdma方式且包括多个时间频率资源的帧,所述时间频率资源是由时间以及频率规定的资源,所述
ofdma是指,orthogonal frequency-division multiple access即正交频分多址;以及发送步骤,将在所述帧构成步骤构成的所述帧,通过电波发送,在所述帧构成步骤中,将包括通信用资源和感测用资源的帧作为所述帧来构成,所述通信用资源是配置包括通信数据的码元的时间频率资源,所述感测用资源是配置用于通过电波的感测的码元的时间频率资源,所述电波是在所述发送步骤发送的电波。
[0097]
通过上述形态,发送方法能够实现与上述发送装置同样的效果。
[0098]
另外,这些概括性的或者具体的形态可以由系统、方法、集成电路、计算机程序或者计算机可读取的cd-rom等记录介质来实现,也可以由系统、方法、集成电路、计算机程序或者记录介质的任意的组合来实现。
[0099]
以下参照附图对本公开中的发送装置进行详细说明。
[0100]
另外,以下将要说明的实施方式均为概括性的或具体的例子。以下的实施方式所示的数值、形状、材料、构成要素、构成要素的配置位置以及连接方式、步骤、步骤的顺序等均为一个例子,主旨并非是对本发明进行限定。并且,对于以下的实施方式的构成要素之中没有记载在示出最上位概念的独立技术方案中的构成要素,作为任意的构成要素来说明。
[0101]
(实施方式1)
[0102]
在本实施方式中,对能够检测周围的物体的位置、多个物体的位置关系、与物体的距离等的检测装置的构成进行说明。另外,检测装置也称为发送装置。
[0103]
图1示出了本实施方式中的检测装置的构成的一个例子。
[0104]
发送装置y101将控制信号y100作为输入。此时,控制信号y100例如包括“开始物体检测的工作”的信息、“结束物体检测的工作”的信息、“开始静止图像或者运动图像的存储”的信息、“结束静止图像或者运动图像的存储”的信息等用于对检测装置中包括的一个或者多个构成的工作进行控制的信息。
[0105]
在控制信号y100包括“开始物体检测的工作”的信息的情况下,例如发送装置y101生成m个用于在接收装置y106进行电波的波达方向估计的调制信号,并输出m个发送信号。即,输出发送信号y102_1至y102_m。另外,m为1以上的整数。于是,发送信号y102_i作为电波从天线y103_i输出。另外,i为1以上m以下的整数。并且,天线y103_i可以由一个天线构成,也可以由多个天线构成。由多个天线构成的天线y103_i也可以具备进行指向性控制的功能。
[0106]
从发送装置y101被发送来的调制信号由位于放射方向或者放射范围的物体反射。于是,接收装置y106接收该反射波。因此,接收装置y106将“由天线y104_1接收的接收信号群y105_1”至“由天线y104_n接收的接收信号群y105_n”作为输入。另外,n为1以上的整数。
[0107]
以下对天线y104_i由多个天线构成的情况进行说明。因此在以下的说明中,将以天线y104_i接收的信号称为“接收信号群y105_i”。例如,在天线y104_i由16个天线构成的情况下,接收信号群y105_i则为由16个接收信号构成。
[0108]
接收装置y106例如针对接收信号群y105_1,在进行波达方向估计的同时,利用发送装置y101对调制信号进行发送的时刻以及得到接收信号群y105_1的时刻,对物体的距离进行估计。因此,接收装置y106对物体估计信息y107_1进行输出。另外,上述的说明中的“物体的距离”这一用语中的距离是指,例如物体与检测装置之间的距离。在此,作为距离而被算出的值例如可以考虑为物体与天线之间的距离、物体与多个天线的中心位置之间的距
离、物体与后述的传感器部之间的距离等。并且,“物体的距离”例如可以是调制信号在物体进行反射的点或者区域与检测装置之间的距离。并且,例如在对多个调制信号进行同时发送的情况下,在一个物体中的多个点或者区域每一个,“物体的距离”会有被同时测量的情况。
[0109]
同样,接收装置y106针对接收信号群y105_i,在进行波达方向估计的同时,利用发送装置y101对调制信号进行发送的时刻以及得到接收信号群y105_i的时刻,对物体的距离进行估计。因此,接收装置y106对物体估计信息y107_i进行输出。另外,i为1以上n以下的整数。
[0110]
第1处理部y108将物体估计信息y107_1至物体估计信息y107_n作为输入。第1处理部y108例如利用物体估计信息y107_1至物体估计信息y107_n,进行详细的物体估计,并输出物体估计信号y109。
[0111]
显示部y113将图像信息y124、用于限定对物体进行识别的区域的区域信息y111作为输入,对图像与对物体进行识别的区域建立关联,并输出区域信号y114。另外,图像与对物体进行识别的区域的关联例如是指,“在显示部y113得到的图像中,指定进行物体识别的区域”。并且,图像与对物体进行识别的区域的关联例如也可以是,“按照以在显示部y113得到的图像而被确定的区域,来确定第1处理部y108进行物体识别的区域”。
[0112]
选择部y112将用于限定进行物体识别的区域的、区域信息y111以及区域信号y114作为输入。于是,选择部y112根据区域信息y111以及区域信号y114,来决定对物体进行检测的区域,并输出选择区域信号y115。另外,选择部y112也可以不限定对物体进行检测的区域,在这种情况下,选择部y112可以不输出选择区域信号y115,并且可以将“不限定对物体进行检测的区域”这一信息包括在选择区域信号y115中。
[0113]
在此虽然记载了“存在显示部y113”、“显示部y113输出区域信号y114”,不过也可以不是这种构成。并且,显示部y113也可以通过液晶等画面中的触控面板的功能(对如液晶等面板这种显示装置与如触摸板这种位置输入装置进行了组合的装置),按照用户的指定来限定物体的检测区域。
[0114]
第2处理部y116将物体估计信号y109、选择区域信号y115、图像信息y124作为输入。此时,第2处理部y116进行第1处理方法以及第2处理方法。另外,第2处理部y116也可以执行第1处理方法以及第2处理方法的任一个,还可以按照状况,对第1处理方法与第2处理方法进行切换来进行处理。并且也可以是,第2处理部y116以物体估计信号y109,来生成用于存储多个位置的距离信息的辅助信息。另外,辅助信息例如是多个“与成为拍摄候选的物体对应的位置信息”,第2处理部y116可以从多个“与成为拍摄候选的物体对应的位置信息”中选择“与成为拍摄对象的物体对应的位置信息”。
[0115]
第1处理方法:
[0116]
第2处理部y116根据图像信息y124,进行物体的识别。于是,第2处理部y116根据该物体的识别信息和物体估计信号y109,对识别的各物体与检测装置之间的距离进行估计,并输出估计距离信息y117。另外,第2处理部y116也可以根据选择区域信号y115,来限定对物体进行识别的区域。并且,第2处理部y116也可以根据选择区域信号y115,来限制进行距离估计的物体。
[0117]
第2处理方法:
[0118]
第2处理部y116根据物体估计信号y109和图像信息y124,对各物体与检测装置之间的距离进行估计,并输出估计距离信息y117。另外,第2处理部y116可以根据选择区域信号y115,来限定对物体进行识别的区域。并且,第2处理部y116也可以根据选择区域信号y115,来限制进行距离估计的物体。
[0119]
透镜控制部y110将物体估计信号y109和估计距离信息y117作为输入。于是,透镜控制部y110“利用物体估计信号y109以及估计距离信息y117”、或者“利用物体估计信号y109或者估计距离信息y117的任一个”,来决定透镜关联的工作的控制,例如决定“针对成为对象的物体的焦距的控制”、“针对成为对象的物体的透镜的焦点(聚焦)的控制”、“拍摄成为对象的物体的方向的控制”等,输出工作控制信号y118。
[0120]
透镜部y119将工作控制信号y118作为输入,根据工作控制信号y118,进行透镜关联的工作的控制,例如进行“针对成为对象的物体的焦距的控制”、“针对成为对象的物体的透镜的焦点(聚焦)的控制”、“拍摄成为对象的物体的方向的控制”等控制,输出物体信号y120。另外,物体信号y120是光信号。
[0121]
快门部y121将控制信号y100和物体信号y120作为输入,根据控制信号y100,来控制快门的工作,输出控制后的物体信号y122。
[0122]
传感器部y123将控制后的物体信号y122作为输入,例如进行光电信号的转换,输出图像信息y124。作为传感器部y123,例如能够采用ccd(charge-coupled device)图像传感器、cmos(complementary metal oxide semiconductor)图像传感器、有机cmos图像传感器等。
[0123]
存储部y125将控制信号y100和图像信息y124作为输入,根据控制信号y100,存储图像信息,例如存储运动图像、静止图像。另外,存储部y125也可以将由传感器部y123获得的图像信息直接进行存储,利用图像编码技术,来存储被编码的编码数据。
[0124]
另外也可以是,存储部y125除了图像信息以外或者取代图像信息,而针对图像施加信号处理,将作为信号处理的结果的解析数据进行存储。解析数据例如是,针对人、动物、车辆或者无人机等被预先设定的任意的检测对象的信息,例如该检测对象是否被拍摄,即检测对象是否停留在拍摄区域内的信息。并且,解析数据可以包括检测对象的颜色或大小等与属性相关的信息、检测对象的朝向、移动路径、速度、停留时间、或者与在做什么、在看什么等工作有关的信息。与属性相关的信息例如在是人的情况下,可以使用性別或年龄等,在是车辆等情况下,可以是车辆种类、乘坐人数、被装载的货物量等。
[0125]
如以上说明所示,通过本实施方式中的检测装置,能够利用电波来估计与物体的距离。并且,通过本实施方式中的检测装置,根据被估计的与物体的距离,来控制对物体进行拍摄时所使用的透镜,据此,例如能够对成为拍摄的对象的物体进行鲜明的拍摄等,从而能够按照目的来进行透镜的控制。并且,通过本实施方式中的检测装置,例如即使在周边较暗的状况下,也能够估计与物体的距离,从而能够提高与物体的距离的估计的可靠性。并且,通过进行基于电波的与物体的距离估计和基于光信号(图像)的与物体的距离估计,从而能够得到的效果是,能够以更高的精确度或高的可靠性来进行距离估计。
[0126]
接着将要说明的构成是,能够对与图1不同的物体进行高精确度检测的检测装置。
[0127]
图2示出了与图1不同的检测装置的构成例。另外,在图2中对于与图1同样的工作赋予相同的编号,并省略说明。
[0128]
附带快门功能的传感器部y200将控制信号y100、物体信号y120作为输入。附带快门功能的传感器部y200将控制信号y100作为输入,根据控制信号y100,对快门的工作进行控制,于是例如通过进行光电信号的转换,来生成图像信息y124并输出。另外,作为附带快门功能的传感器部y200的快门,例如有电子快门、全局快门等。
[0129]
在图2中,关于附带快门功能的传感器部y200以外的部分的工作,与利用图1进行的说明相同。
[0130]
通过上述构成的检测装置,能够利用电波来估计与物体的距离。并且,通过上述构成的检测装置,能够根据被估计的与物体的距离,来控制在对物体进行拍摄时所使用的透镜,据此,例如能够鲜明地拍摄成为拍摄的对象的物体等,从而能够进行与目的对应的透镜的控制。并且,通过上述构成的检测装置,例如即使在周边暗的情况下,也能够估计与物体的距离,并能够提高与物体的距离的估计的可靠性。并且,通过执行基于电波的与物体的距离估计和基于光信号(图像)的与物体的距离估计,从而能够得到的效果是,能够进行更高精确度的或者可靠性高的距离估计。
[0131]
接着,对能够高精确地检测与图1以及图2不同的物体的检测装置的构成进行说明。
[0132]
图3示出了与图1以及图2不同的检测装置的构成例。另外,在图3中对于与图1以及图2同样的工作赋予相同的编号,并省略说明。
[0133]
在图3中具有特点之处是,“检测装置具备快门部y121以及附带快门功能的传感器部y200”。
[0134]
例如,快门部y121由焦平面快门这种机械式快门构成。并且,附带快门功能的传感器部y200所具备的快门为电子快门或者全局快门。
[0135]
附带快门功能的传感器部y200将控制信号y100作为输入,在控制信号y100中包含的工作信息为运动图像模式的情况下,附带快门功能的传感器部y200所具备的快门功能进行工作。另外,快门部y121将控制信号y100作为输入,在控制信号y100中包含的工作信息为运动图像模式的情况下,快门部y121不进行快门的工作,即快门成为打开的状态。
[0136]
附带快门功能的传感器部y200将控制信号y100作为输入,在控制信号y100中包含的工作信息为静止图像模式的情况下,在控制信号y100中例如包括快门速度的信息。附带快门功能的传感器部y200在静止图像模式的情况下,按照快门速度的信息,使附带快门功能的传感器部y200的快门功能工作。
[0137]
并且,快门部y121将控制信号y100作为输入,在控制信号y100中包含的工作信息为静止图像模式的情况下,在控制信号y100中例如包括快门速度的信息。快门部y121在静止图像模式的情况下,按照快门速度的信息,使快门功能工作。
[0138]
另外,在静止图像模式下,附带快门功能的传感器部y200的快门功能工作时,快门部y121的快门功能不工作。相反,在快门部y121的快门功能工作时,附带快门功能的传感器部y200的快门功能不工作。
[0139]
在图3中,对于上述说明以外的部分的工作,与在图1中的说明相同。
[0140]
通过上述构成的检测装置,能够利用电波来估计与物体的距离。并且,通过上述构成的检测装置,根据被估计的与物体的距离,来控制在对物体进行拍摄时所使用的透镜,据此,例如能够鲜明地拍摄成为拍摄的对象的物体等,从而能够进行与目的对应的透镜的控
制。并且,通过上述构成的检测装置,例如即使在周边暗的情况下,也能够估计与物体的距离,并且能够提高与物体的距离的估计的可靠性。并且,通过执行基于电波的与物体的距离估计和基于光信号(图像)的与物体的距离估计,从而能够得到的效果是,能够以更高的精确度或者更高的可靠性来进行距离估计。
[0141]
图4示出了图1的变形例。
[0142]
在图4中,对于与图1同样的工作,赋予相同的编号并省略说明。
[0143]
第2处理部y116将物体估计信号y109、选择区域信号y115、图像信息y124、数据群y403作为输入。此时,第2处理部y116根据数据群y403,从图像信息y124中进行物体的识别。于是,第2处理部y116根据该物体的识别信息和物体估计信号y109,对识别的各物体和图本身的检测装置的距离进行估计,并输出估计距离信息y117。另外,第2处理部y116也可以通过选择区域信号y115,来限制进行距离估计的物体。
[0144]
作为利用图像信息y124进行物体的识别时所使用的信号处理的一个例子,例如可以是,对人或人脸等身体的一部分进行检测的处理、对人物进行识别的处理、对车辆
や
无人机等对象物进行检测的处理、对车辆或无人机等对象物进行识别的处理、对被检测的人或对象物的工作或者移动进行检测的处理、对被检测的人或对象物进行追踪的处理等。在此,图像信息y124可以是一或者多个静止图像,也可以是由以预先规定的定时而被连续地获得的多个帧结构的运动图像。
[0145]
这些信号处理例如是如下这样执行的,例如从图像信息y124中,提取按照该信号处理的目的而决定的通过各自的规定的运算处理而得到的一个或者多个特征量,将被提取的特征量与想要识别的对象物或其工作所对应的已知的特征量进行比较,根据比较的结果来执行信号处理。并且,这些信号处理也可以根据被提取的特征量是否超过规定的阈值的判断结果而被执行。并且,这些信号处理也可以根据上述例子以外的信号处理而被执行,例如可以通过利用多层结构的神经网络进行机器学习而制作的模型而被执行。在利用通过多层结构的神经网络来进行机器学习而被制作的模型的情况下,可以在针对运动图像用的摄像数据进行前处理的基础上,将前处理后的数据输入到利用多层结构的神经网络来进行机器学习而制作的模型。
[0146]
在图4中也可以是,第2处理部y116针对查询数据部y402输出数据。例如,可以根据该数据,查询数据部y402减少数据群y403的输出数据量。
[0147]
在上述说明中虽然记载了,第2处理部y116利用图像信息y124进行物体的识别的例子,除了图像信息y124以外还可以利用物体估计信号y109来进行物体的识别。此时,物体估计信号y109可以不必仅由距离信息来构成,例如也可以包括通过对接收信号群y105_i进行解析而得到的反射率等信息。
[0148]
并且,第2处理部y116也可以输出物体的识别信息y404。
[0149]
通信装置y400将物体的识别信息y404作为输入,生成包括该数据的调制信号,并发送到通信对方的通信装置。此时,通信对方的通信装置例如与服务器连接,服务器从通信装置y400所发送的调制信号中获得物体的识别信息y404,制作物体识别的数据库,服务器经由通信装置,生成包括该数据库的调制信号,并发送到通信装置y400。
[0150]
通信装置y400接收该调制信号,获得物体识别的数据库y401,并输出给查询数据部y402。于是,查询数据部y402将物体识别的数据库y401作为输入,对用于第2处理部y116
进行物体识别的的数据群y403进行更新。
[0151]
通过上述构成的检测装置,能够利用电波来估计与物体的距离。并且,通过上述构成的检测装置,根据被估计的与物体的距离,来控制在对物体进行拍摄时所使用的透镜,据此,例如能够鲜明地拍摄成为拍摄的对象的物体等,从而能够按照目的对透镜进行控制。并且,通过上述构成的检测装置,例如即使在周边暗的情况下,也能够估计与物体的距离,从而能够提高与物体的距离的估计的可靠性。并且,通过执行基于电波的与物体的距离估计和基于光信号(图像)的与物体的距离估计,从而能够得到的效果是,能够以更高的精确度或者更高的可靠性来进行距离估计。
[0152]
而且,通过上述构成的检测装置,由于是对物体的识别时所使用的数据库进行更新的构成,因此能够提高物体识别中的精确度以及可靠性,这样,能够提高距离估计的精确度以及可靠性。并且,在除了图像信息以外,来利用通过电波得到的信息来进行物体识别的情况下,能够提高物体识别中的精确度以及可靠性。
[0153]
图5是图2的变形例,对于与图1、图2以及图4相同的工作,赋予相同的编号并省略说明。关于图5中的各部的工作,由于已经进行了说明,因此省略说明。
[0154]
图6是图3的变形例,对于与图1、图2以及图4同样的工作,赋予相同的编号并省略说明。关于图6中的各部的工作,由于已经进行了说明,因此省略说明。
[0155]
通过上述构成的检测装置,能够利用电波来估计与物体的距离。并且,通过上述构成的检测装置,根据被估计的与物体的距离,来控制在对物体进行拍摄时所使用的透镜,据此,例如能够鲜明地拍摄成为拍摄的对象的物体等,从而能够按照目的对透镜进行控制。并且,通过上述构成的检测装置,例如即使在周边暗的情况下,也能够估计与物体的距离,从而能够提高与物体的距离的估计的可靠性。并且,通过执行基于电波的与物体的距离估计和基于光信号(图像)的与物体的距离估计,从而能够得到的效果是,能够以更高的精确度或者更高的可靠性来进行距离估计。
[0156]
而且,通过上述构成的检测装置,由于是对物体的识别时所使用的数据库进行更新的构成,因此能够提高物体识别中的精确度以及可靠性,这样,能够提高距离估计的精确度以及可靠性。并且,在处理图像信息以外,还利用通过电波而得到的信息来进行物体识别的情况下,能够提高物体识别中的精确度以及可靠性。
[0157]
在本实施方式中,作为图1至图6的构成的一个例子,虽然将装置称为“检测装置”进行了说明,关于名称并非受此所限。例如,本实施方式中的装置由于具备存储部,因此也可以称为“存储装置”,由于具备传感器部,也可以称为“相机”、“摄像机”、“监视用相机”、“安全监控用相机”、“记录装置”、“静止图像拍摄装置”。并且,可以简单称为“装置”。另外,关于名称并非受此所限。
[0158]
并且,图1、图2、图3、图4、图5以及图6的构成也可以由分离的多个装置的组合而构成的系统来实现。以下对作为分离的多个装置来实现的情况下的例子进行说明。
[0159]
图7示出第1个“装置的分离例”。
[0160]
第2装置y702是具备图1、图2、图3、图4、图5以及图6的装置中的透镜部y119的装置。于是,第1装置y701成为具备图1、图2、图3、图4、图5、图6的装置中的透镜部y119以外的部分的装置。
[0161]
于是,第1装置y701具备用于与第2装置y702连接的第1接口y703,第2装置y702具
备用于与第1装置y701连接的第2接口y704。
[0162]
因此,第1接口y703将工作控制信号y118作为输入。于是,第2接口y704将信号输出到透镜部y119。因此,通过对第1接口y703与第2接口y704进行连接,透镜部y119能够得到相当于工作控制信号y118的信号。另外,第1接口y703与第2接口y704可以是任意的连接。例如可以是第1接口y703与第2接口y704直接连接,也可以是第1接口y703与第2接口y704经由连接电缆等连接。另外,连接方法并非受这些例子所限。
[0163]
图8是第2个“装置的分离例”。
[0164]
第3装置y802成为具备图1、图2、图3、图4、图5、图6的装置中的发送装置y101、天线y103_1至y103_m、天线y104_1至y104_n、接收装置y106、第1处理部y108的装置。于是,第1’装置y801成为具备图1、图2、图3、图4、图5、图6的装置中的“发送装置y101、天线y103_1至y103_m、天线y104_1至y104_n、接收装置y106、第1处理部y108”以外的部分的装置。
[0165]
于是,第1’装置y801具备用于与第3装置y802连接的第3接口y803,第3装置y802具备用于与第1’装置y801连接的第4接口y804。
[0166]
因此,第3接口y803将控制信号y100作为输入。于是,第4接口y804将信号输出到发送装置y101。因此,通过对第3接口y803与第4接口y804进行连接,发送装置y101能够得到相当于控制信号y100的信号。
[0167]
并且,第4接口y804将物体估计信号y109作为输入。于是,第3接口y803输出信号。因此,通过对第3接口y803与第4接口y804进行连接,从而第3接口y803输出相当于物体估计信号y109的信号。
[0168]
另外,第3接口y803与第4接口y804可以是任意的连接。例如,第3接口y803与第4接口y804可以被直接连接,第3接口y803与第4接口y804也可以经由连接电缆等来连接。另外,连接方法并非受这些例子所限。
[0169]
图9是第3个“装置的分离例”。另外,在图9中,对于与图7以及图8同样的工作,赋予相同的编号并省略说明。
[0170]
第1”装置y901成为具备图1、图2、图3、图4、图5以及图6的装置中的“发送装置y101、天线y103_1至y103_m、天线y104_1至y104_n、接收装置y106、第1处理部y108、透镜部y119”以外的部分的装置。并且,第1”装置y901具备第1接口y703、第3接口y803。
[0171]
另外,在图9中,针对第1接口y703、第2接口y704、第3接口y803、第4接口y804的工作,与已经进行的说明相同。
[0172]
图9是第3个“装置的分离例”。另外,在图9中,对于与图7以及图8同样的工作,赋予相同的编号并省略说明。
[0173]
第1”装置y901成为具备图1、图2、图3、图4、图5、图6的装置中的“发送装置y101、天线y103_1至y103_m、天线y104_1至y104_n、接收装置y106、第1处理部y108、透镜部y119”以外的部分的装置。于是,第1”装置y901具备第1接口y703、第3接口y803。
[0174]
另外,在图9中,对于第1接口y703、第2接口y704、第3接口y803、第4接口y804的工作,与已经进行的说明相同。
[0175]
图10是第4个“装置的分离例”。另外,在图10中,对于与图7、图8、图9同样的工作,赋予相同的编号并省略说明。
[0176]
第4装置y1002具备图1、图2、图3、图4、图5、图6的装置中的“发送装置y101、天线
y103_1至y103_m、天线y104_1至y104_n、接收装置y106、第1处理部y108、透镜部y119”,并且具备第2接口y704、第4接口y804。另外,对于图10中的各部的工作,由于已经进行了说明,在此省略说明。
[0177]
以上虽然利用图1至图10对本实施方式的工作例进行了说明,图1至图10的构成为例子,并非受这些构成所限。
[0178]
图1至图10中的发送装置y101、接收装置y106利用的是电波,对此时的工作进行了说明。与此不同,图1至图10中的发送装置y101例如即使是如下的构成也能够执行,即生成如可见光这种光的调制信号,接收装置y106对该光的调制信号进行接收。此时,取代天线y103_1至y103_m而采用led(light emitting diode)或有机el(electro-luminescence)等,取代天线y104_1至y104_n而采用光电二极管、图像传感器等。
[0179]
另外,在图1至图10等装置中,也可以利用通过电波来获得的信息,进行物体识别。在图1至图10中具有特点之处是,进行“物体识别、或者与物体的距离估计”、并且对“静止图像或者运动图像”进行记录(存储),具有这种特点的装置的构成并非受图1至图10的构成所限。
[0180]
另外,在想要延长感测的距离时,需要使发送电力增大。例如能够通过使发送频带变窄的方法,来增大发送电力。并且,能够进行利用了极化波的感测。
[0181]
(实施方式2)
[0182]
在本实施方式中将要说明的是,采用了实施方式1中说明的图1至图10等的电波的距离估计、或者进行采用了电波的物体识别的装置所发送的调制信号的构成方法。
[0183]
图11示出了实施方式1中所说明的进行“采用了电波的距离估计、或者采用了电波的物体识别”的装置y1101、成为“距离估计或者物体识别”的对象的物体y1102、以及其他的装置的状态的一个例子。另外,以下将进行“采用了电波的距离估计、或者采用了电波的物体识别”的装置y1101,简单记载为“装置y1101”。
[0184]
在图11中除了装置y1101、物体y1102,还示出终端y1103以及ap(访问接入点)y1104。
[0185]
终端y1103和y1104的ap在进行通信时使用第1频带。并且,装置y1101在对物体y1102进行距离估计或者物体识别时使用第1频带。
[0186]
此时,在“终端y1103和y1104的ap的通信”与“装置y1101针对物体y1102的距离估计或者物体识别”被同时执行的情况下,会出现彼此的电波发生干扰,这样有可能导致通信质量降低以及距离估计、物体识别的精确度降低。
[0187]
在本实施方式中,对用于改善这些降低的方法进行说明。
[0188]
图12示出了图11中的、终端y1103和ap(访问接入点)y1104发送通信用的调制信号时的帧结构的例子,横轴为时间。
[0189]
通信用基准码元(reference symbol)y1201是用于“通信对方进行信号检测、时间同步、频率同步、信道估计等”的码元。并且,通信用基准码元y1201也可以是为了进行数据通信的手续中所需要的控制信息、mac(media access control)帧。
[0190]
通信用控制信息码元y1202例如是通信用数据码元y1203的例如用于通知通信方法的码元。因此,通信用控制信息码元y1202例如是纠错编码方法(编码率、块长(码长)、纠错码的信息等)的信息、调制方式的信息、发送方法的信息(例如采用了单流传输或者多流
传输的哪一个的信息)(mcs(modulation and coding scheme)的信息)、数据长等信息。
[0191]
通信用数据码元y1203是用于向通信对方传输数据的码元。
[0192]
另外,图12的帧结构仅为一个例子,也可以包括其他的码元。并且,在发送图12的帧时,可以采用单载波传输方式,也可以采用ofdm(orthogonal frequency division multiplexing:正交频分复用)等多载波传输方式。
[0193]
在通信用基准码元y1201中也可以包括传输数据的区域。在该传输数据的区域中可以包括用于识别发送信号是“发送通信用的信号”、还是“发送用于物体检测的信号”的数据。
[0194]
并且,在此虽然称为通信用基准码元y1201,关于名称并非受此所限,也可以将通信用基准码元y1201称为导频码元、训练码元、训练字段、前导码、控制信息码元、midamble码(中间码)等。
[0195]
图13示出了装置y1101发送的调制信号的帧结构的一个例子。另外,在图13中,对于与图12同样的工作赋予相同的编号,由于已经进行了说明,因此省略说明。
[0196]
如在实施方式1的说明所示,根据控制信号y100中包括的“开始物体检测的工作”、或者“开始静止图像或者运动图像的记录”的信息,首先,装置y1101对通信用基准码元y1201进行发送。
[0197]
另外,“开始物体检测的工作”或者“开始静止图像或者运动图像的记录”可以通过装置y1101所具备的“用户按下按键”、或者“用户触摸触控面板”、或者“用户按下快门键”、或者“用户按下开始录像键”来实现。
[0198]
于是,装置y1101对“用于物体检测的调制信号或者用于与物体的距离估计的调制信号y1302”进行发送。
[0199]
装置y1101如图13所示通过对调制信号进行发送,图11中的终端y1103以及y1104的ap通过对图13的通信用基准码元y1201进行检测,从而可以知道在第1频带存在调制信号。因此,在终端y1103、以及y1104的ap对通信用基准码元y1201进行检测时,暂时对调制信号的发送进行保留。于是,终端y1103、以及y1104的ap能够在检测不到通信用基准码元y1201时,开始调制信号的发送。
[0200]
通过以上所述,由于能够抑制“由装置y1101发送的调制信号”与“由终端y1103、y1104的ap发送的调制信号”相互干扰这种状况的发生,因此,能够得到“终端y1103和y1104的ap的通信的数据的接收质量的提高”、“装置y1101的距离估计、物体识别的精确度的提高”的效果。
[0201]
另外,图13的帧结构仅为一个例子,也可以包括其他的调制信号。
[0202]
以下针对采用了电波的感测方法,举几个例子进行说明。另外,执行采用了以下的实施方式中所说明的电波的感测方法的装置,可以将该感测方法与采用了感测数据的处理组合起来使用,所述感测数据是由实施方式1以及2中说明所示的相机等具有摄像功能的传感器而得到的。并且,执行采用了以下的实施方式中所说明的电波的感测方法的装置,也可以不将该感测方法与采用了通过相机等具有摄像功能的传感器得到的感测数据的处理组合来实施。
[0203]
在此,使用不与采用了感测数据的处理相组合的电波来执行的感测方法并非是指,不具备相机的装置使用电波来进行感测的情况,所述感测数据是由相机等具有摄像功
能的传感器得到的。例如,智能手机这种具备相机的装置,可以将通过一个多个相机进行拍摄或测距等感测、与通过无线通信部或无线雷达等采用电波进行的感测独立进行。并且,智能手机这种具备相机的装置,为了对通过一个或者多个相机进行拍摄或测距等的感测进行控制,而不使用通过无线通信部或无线雷达等利用电波进行的感测结果,并且,为了对通过无线通信部或无线雷达等利用电波进行的感测进行控制,而不使用通过一个或者多个相机进行拍摄或测距等的感测结果,另外,也可以将双方的感测结果与一个应用进行组合来使用。
[0204]
(实施方式3)
[0205]
在本实施方式中,例如,系统由进行通信的装置、进行感测的装置、进行通信以及感测的装置之中的一个以上构成。首先,对进行感测的装置、进行通信以及感测的装置的构成等进行说明。
[0206]
图14示出了对感测用的信号进行发送,并对从周围的物体反射回来的感测用的信号进行接收,进行感测的装置x100的构成的一个例子。
[0207]
发送装置x101生成发送信号x102_1至x102_m,以用作感测用的信号,将发送信号x102_1至x102_m的每一个从天线x103_1至x103_m发送。在此,用于发送的天线的数量为m,m是1以上的整数、或者2以上的整数。
[0208]
发送装置x101例如可以针对相同的感测信号乘以按每个天线规定的系数,来生成发送信号x102_1至x102_m,并从天线x103_1至x103_m发送,据此,进行感测信号的指向性控制。并且也可以是,发送装置x101例如针对多个感测信号的每一个,按每个感测信号来乘以按每个天线规定的系数并进行合成,来生成发送信号x102_1至x102_m,并从天线x103_1至x103_m发送。据此,能够按照每个感测信号来进行指向性控制。上述的按每个天线规定的系数、或者按每个感测信号且按每个天线规定的系数由复数或者实数来表示。按照该系数的值,从各天线发送的感测信号的振幅以及/或者位相被变更。不过,系数可以为1,在这种情况下,由发送装置x101生成的感测信号从系数值为1的天线被直接发送。
[0209]
另外,发送装置x101也可以不进行指向性控制,而对发送信号进行发送。例如,发送装置x101可以将多个感测信号的的每一个,作为对应的天线的发送信号来直接输出,从天线x103_1至x103_m发送。另外,在上述说明中,对感测用信号以及天线的数量为多个的情况进行了说明,发送装置x101所生成的感测用信号的数量以及对感测用信号进行发送的天线的数量也可以是1。
[0210]
从天线x103_1至x103_m发送的感测用信号在物体#1x110_1或物体#2x110_2反射,反射的感测用信号由装置x100所具备的天线x104_1至x104_n接收。在此,对感测用信号进行接收的天线的数量为n,n为1以上的整数、或者2以上的整数。用于发送的天线的数量m可以与用于接收的天线的数量n相同,也可以不同。
[0211]
由天线x104_1至x104_n接收的接收信号x105_1至x105_n被输入导接收装置x106。接收装置x106针对接收信号x105_1至x105_n,进行如下的处理,并输出估计信号x107,所述处理例如是指,仅对感测用信号被发送的频带或者频带内的信道的成分进行提取的滤波处理、从无线频带范围变换到中间频带(if)或基带信号的频带范围的频率变换处理、针对n个接收信号进行加权合成处理等。
[0212]
针对n个接收信号进行加权合成处理中所使用的系数能够按接收信号x105_1至
x105_n的每一个来设定,并且能够通过对系数的值进行变更,来进行接收的指向性控制。系数可以是预先估计的,也可以使用接收信号x105_1至x105_n,来估计加权合成后的感测信号成分的振幅或者信噪比(snr(signal-to-noise ratio))比采用了其他的系数的情况下大、或者超过规定的阈值的系数。并且也可以是,接收装置x106通过使用多个与接收信号x105_1至x105_n对应的n个系数的组,来同时获得与各系数的组对应的指向性的信号。不过,也可以不进行加权合成来执行。
[0213]
估计部x108使用估计信号x107,来进行感测,即进行与周围环境相关的估计处理。关于估计部x108进行估计处理的详细将在以后说明。
[0214]
控制信号x109是被输入到发送装置x101、接收装置x106、以及估计部x108的控制信号,针对发送装置x101、接收装置x106、以及估计部x108,进行感测的执行指示、或者感测范围、感测定时的控制等。
[0215]
以上是关于本实施方式中的装置x100的构成的一个例子的说明。
[0216]
另外,在图14中举例说明了,在装置x100生成的信号由m个天线发送,以n个天线接收的信号在接收装置x106被信号处理的情况,执行本实施方式中说明的感测方法的装置的构成并非受此所限。
[0217]
例如,用于信号的发送的发送天线部可以由分别包括多个天线的多个天线单元来构成。在此,多个天线单元可以具有相同的指向性以及指向性控制功能,在天线单元间能够进行指向性控制的范围可以不同。此时,一个发送装置x101的构成可以是,从多个天线单元中,选择用于感测信号的发送的天线单元来使用,也可以从多个天线单元同时发送相同的感测信号。并且,发送装置x101可以对一个感测信号从一个天线单元发送、与从多个天线单元同时发送进行切换。并且,装置x100可以具备多个发送装置x101,也可以按每个天线单元来具备发送装置x101。
[0218]
以天线x104_1至x104_n接收的接收信号x105_1至x105_n被输入到接收装置x106。接收装置x106针对接收信号x105_1至x105_n进行如下的处理,对估计信号x107进行输出,所述处理例如是指,仅提取发送了感测用信号的频带或者频带内的信道的成分的滤波处理、从无线频带变换为中间频带(if)或基带信号的频带的频率变换处理、或针对n个接收信号的加权合成处理等。
[0219]
针对n个接收信号的加权合成处理所使用的系数可以按接收信号x105_1至x105_n每一个来设定,并且可以通过对系数的值进行变更,来进行接收的指向性控制。系数可以被预先估计,并且可以使用接收信号x105_1至x105_n,来估计加权合成后的感测信号成分的振幅或者信噪比(snr)比采用了其他的系数的情况下大、或者超过规定的阈值的系数。并且,接收装置x106通过使用多个与接收信号x105_1至x105_n对应的n个系数的组,从而能够同时获得与各系数的组对应的指向性的信号。不过,也可以不进行加权合成来执行。
[0220]
估计部x108使用估计信号x107进行感测,即进行与周围环境相关的估计处理。关于估计部x108进行的估计处理的详细将在以后说明。
[0221]
控制信号x109是被输入到发送装置x101、接收装置x106、以及估计部x108的控制信号,针对发送装置x101、接收装置x106、以及估计部x108进行感测的执行指示、或感测范围、感测定时的控制等。
[0222]
以上是有关本实施方式中的装置x100的构成的一个例子的说明。
[0223]
另外,在图14中虽然举例说明了,由装置x100生成的信号以m个天线发送,以n个天线接收的信号在接收装置x106被信号处理的情况,执行本实施方式所说明的感测方法的装置的构成并非受此所限。
[0224]
例如,用于信号的发送的发送天线部可以由分别包括多个天线的多个天线单元构成。在此,多个天线单元可以具有相同的指向性以及指向性控制功能,并且在天线单元间,能够进行指向性控制的范围可以不同。此时,一个发送装置x101的构成可以是,从多个天线单元中选择用于感测信号的发送的天线单元来使用,并且可以从多个天线单元同时发送相同的感测信号。并且,发送装置x101可以对一个感测信号从一个天线单元发送、与多个天线单元同时发送进行切换。并且,装置x100可以具备多个发送装置x101,也可以按照每个天线单元具备发送装置x101。
[0225]
同样,用于信号的发送的接收天线部可以由分别包括多个天线的多个天线单元构成。在此,多个天线单元可以是相同的指向性的控制范围以及指向性控制精确度等指向性控制能力,天线单元间的指向性控制能力也可以不同。并且,多个天线单元虽然可以是指向性的控制范围以及指向性控制精确度等指向性控制能力相同,也可以被设置成能够进行指向性控制的空间区域不同。此时,一个接收装置x106的构成可以是,从多个天线单元中选择用于接收信号的获得的天线单元来使用,也可以对从多个天线单元接收的信号同时进行信号处理。并且,接收装置x106可以对如下的信号处理进行切换,这些信号处理是指,仅对一个天线单元接收的接收信号进行的信号处理,以及同时对多个天线单元接收的接收信号进行的信号处理。并且,装置x100可以具备多个接收装置x106,也可以按照每个天线单元来具备接收装置x106。
[0226]
并且,装置x100可以不必另外具备用于发送的多个天线和用于接收的多个天线,而可以具备既能够用于信号的发送又能够用于信号的接收的多个天线。在这种情况下,装置x100可以选择是按每个天线进行发送还是进行接收,并可以对此进行切换,还可以在时间上对是将多个天线用于发送还是用于接收进行切换。
[0227]
并且,装置x100也可以具备能够在信号的发送以及接收中共用的收发天线部。在此,收发天线部可以包括多个天线单元,并能够按照每个天线单元来对是用于发送还是用于接收进行切换。装置x100也可以具备选择部,对用于在发送装置x101生成的信号的发送的天线单元、与用于在接收装置x106被信号处理的信号的接收的天线单元进行选择以及切换。
[0228]
另外,在利用多个天线单元对感测信号进行同时发送的情况下,从各天线单元发送的信号的指向性可以相同也可以不同。在装置x100从多个天线单元以相同的指向性对感测信号进行发送的情况下,具有能够增长感测信号的到达距离、或者能够增长到达可以接收被反射的感测信号的反射位置的距离的可能性。
[0229]
另外,构成上述所说明的天线单元的天线的数量无需在天线单元间为一致,天线单元间的天线数量可以不同。
[0230]
接着将要举例说明的是,估计部x108进行的估计处理。
[0231]
估计部x108例如对自身装置与反射了感测信号的物体之间的距离进行估计。自身装置与反射了感测信号的物体之间的距离的估计例如能够通过如下的方法来导出,即检测针对感测信号的发送时刻的接收时刻的延迟时间,通过在延迟时间上乘以电磁波的传播速
度来导出。并且,估计部x108例如采用music(multiple signal classification:多信号分类)算法等波达方向估计法(direction of arrival estimation),对接收信号的波达方向即反射了感测信号的物体的方向进行估计。估计部x108通过对自身装置与物体之间的距离以及方向进行估计,从而能够对反射了被发送的信号的物体的位置进行估计。估计部x108例如通过music法等波达方向估计、发送天线的位置、接收天线的位置、发送指向控制的方向的信息等,来进行三角测量,从而能够对物体的位置进行估计。估计部x108也可以使用接收信号来进行物体的检测,例如检测物体的动作、物体的材质等。
[0232]
在此,物体的位置可以由极坐标系来表示,也可以由三维的正交坐标系来表示。坐标系的原点例如可以是装置x100内的任意的位置,坐标系的坐标轴可以是任意的朝向。另外,在具备装置x100的设备除装置x100以外,还具备多个与装置x100相同或者不同构成的无线传感器或其他的距离传感器的情况下,由各传感器获得的数据的坐标系的原点以及坐标轴在传感器间可以是共通的,也可以是按各个传感器而固有的。估计部x108可以将上述固有的坐标系所表示的位置信息直接输出,也可以变换为在设备内共通的坐标系来输出。变换后的坐标系可以是设备固有的坐标系,也可以是与该设备所利用的三维地图数据相同的坐标系等与其他的设备共通的坐标系。
[0233]
并且也可以是,估计部x108在多个方向的每一个方向中,对到反射了信号的物体的距离进行估计,将被估计的多个反射位置的三维坐标作为点云来获得。另外,在估计部x108获得的多个测距结果的数据的格式可以不是具有三维坐标的值的点云格式,例如可以是距离图像或其他的格式。在使用距离图像的格式的情况下,距离图像的二维平面内的位置(坐标)与从自身装置来看时的接收信号的波达方向对应,到与各图像的像素位置对应的方向中的物体的距离,作为像素的采样值而被存放。
[0234]
估计部x108也可以进一步使用上述的点云数据或者距离图像数据,来进行物体的形状的估计等识别处理。例如,“距离为规定的范围内的接近位置上的一个以上的点”,或者,将多个点或者图像区域视为同一物体来提取,能够根据该一个或多个点的位置关系或者图像区域的形状,来估计物体的形状。估计部x108可以将被感测的物体的识别等,作为采用了物体的形状的估计结果的识别处理来执行。在这种情况下,估计部x108例如可以对在感测范围内的是人、还是其他的动物进行识别,或者进行物体的种类的识别等。另外,估计部x108进行的识别处理也可以是物体的识别以外的处理。例如,估计部x108可以将对感测范围内的人的数量、或车辆的数量等进行的检测,作为识别处理,来对检测到的人脸的位置或姿勢等进行估计。估计部x108也可以进行与上述的识别处理不同的识别处理,例如进行人脸识别等处理,判断检测到的人脸的形状是否与预先登记的人物一致,并判断是哪个人等。
[0235]
并且也可以是,估计部x108以不同的定时对自身装置与物体之间的距离进行多次测量,来获得自身装置与物体之间的距离或者检测到的点的位置的时间的变化。在这种情况下,估计部x108可以对移动的物体的速度或加速度等进行估计,以此作为利用了自身装置与物体之间的距离或者点的位置的时间的变化的识别处理。例如,估计部x108可以对在感测范围内行使的车辆的速度进行估计,或者对移动方向等进行估计。另外,估计部x108利用距离或点的位置的时间的变化来进行的识别处理,也可以是物体的速度或加速度的估计以外的处理。例如,估计部x108根据检测到的人的姿势的变化,来检测人是否进行了特定的
动作,将装置x100作为智能手机、平板电脑、个人电脑等电子设备的姿势输入用的装置来利用。
[0236]
另外,上述的移动的物体的速度的估计可以通过对发送的感测信号的频率与接收的反射信号的频率进行比较,对通过反射信号所受到的多普勒效应的频率的变化进行估计来导出。
[0237]
接着,举例对发送装置x101以及接收装置x106中所使用的感测信号进行说明。
[0238]
装置x100可以发送非专利文献1或非专利文献2中公开的脉冲信号,以用作感测用的信号。装置x100以用于感测的频带对脉冲信号进行发送,根据针对脉冲信号的发送时刻的反射信号的接收时刻的延迟时间,来测量到反射了感测用信号的物体的距离。
[0239]
作为感测用的信号的不同的例子,装置x100可以使用非专利文献3中记载的frequency modulated continuous wave(fmcw)方式或phase modulated continuous wave(pmcw)方式的信号。fmcw信号是在时间上对频率进行了变更的chirp信号被变换为无线频率的信号。估计部x108利用混频器,对从装置x100发送的信号与由接收装置x106接收的信号进行重叠,以作为采用了fmcw信号的估计处理。其结果是,由于重叠后的信号成为依照接收的信号的飞行时间的频率的中间频率的信号,因此,通过对重叠后的信号中包括的频率成分进行检测,则能够测量到反射了fmcw信号的物体的距离。
[0240]
作为感测用的信号的不同的例子,装置x100可以使用将规定的频率的调制信号,频率变换为用于感测的频带的信号后的信号。在这种情况下,估计部x108例如能够根据从装置x100发送的信号的调制成分的相位与由接收装置x106接收的信号的调制成分的相位的差,来估计到反射了感测用信号的物体的距离。并且,估计部x108也可以通过对发送的调制信号的频率与接收的调制信号的频率进行比较,来检测感测信号进行反射并到被接收为止,因多普勒效应而受到的频率的变动,从而对移动的物体的移动速度和方向进行估计。另外,调制信号中包括的频率成分可以是多个,例如,作为非专利文献4所记载的调制信号,可以使用包括多个频率成分的ofdm信号。
[0241]
另外,作为感测用的信号的例子,并非受上述所限,可以是通过调制方式来调制的信号,也可以是无调制的载波,并且还可以使用除此以外的信号。
[0242]
如以上所述,装置x100可以使用多个天线对多个感测信号进行同时发送,也可以使用分别包括多个天线的多个天线单元,来对多个感测信号进行同时发送。
[0243]
在本实施方式中举例说明的例子是,作为估计部x108所进行的估计处理,根据感测信号的发送时刻与反射信号的接收时刻的差,来测量距离。不过,估计部x108所进行的估计处理并非受上述所限。例如,估计部x108根据接收的反射信号来估计传输路径的状态,基于被估计的传输路径状态在时间上的变化、或者与过去被估计的传输路径状态的平均值、特征量的比较来进行识别处理,据此,进行感测范围是否有物体的判断、或者进行是否有物体的移动的检测等。并且,估计部x108可以根据接收信号的衰减状况,来检测是否有降雨。
[0244]
并且,在本实施方式中对将发送的感测信号的反射波用于感测的例子进行了说明。然而,利用感测信号来进行的感测,并非限定于发送了该感测信号的装置。例如也可以是,装置x100的接收装置x106接收从其他的装置发送来的感测信号,估计部x108根据该接收信号,来判断其他的装置是否位于能够收到感测信号的范围,并可以对其他的装置的方向进行估计。并且,可以根据接收的感测信号的信号强度,来估计到其他的装置的距离。并
且,装置x100的发送装置x101也可以发送感测信号,以使其他的装置能够用于感测。此时被发送的感测信号可以是自身装置为了利用反射波来进行感测而发送的感测信号,也可以为了其他的装置的感测而周期性的发送感测信号。并且,装置x100在接收到从其他的装置发送来的感测信号的情况下,也可以利用发送装置x101,向接收了该接收信号的方向发送感测信号。另外,针对其他的装置发送的感测信号,可以不进行指向性的控制而被发送。
[0245]
并且,在图14中示出的例子虽然是进行感测装置x100接收由物体#1、物体#2反射的信号,不过也可以是,由进行感测的装置x100获得从物体#1、物体#2反射后,再经由其他的物体、物质的反射而得到的信号,来进行物体的检测、与物体的距离、位置等的估计。
[0246]
接着,对使用了与图14不同的电波的感测方法的例子进行说明。
[0247]
图15例如示出了使用电波来进行感测的装置x200的构成的一个例子。对于图15所示的构成中具有与图14相同的功能的构成,赋予相同的编号,并省略对这些构成的详细说明。
[0248]
装置x200与装置x100的不同之处是,利用感测用的调制信号以及/或者通信用的调制信号来进行感测。在此具有特点之处是,例如装置x200发送信号,作为通信对方的终端通过掌握到装置x200所发送的信号的变化,从而对物体(例如,图15的物体#1)的位置、大小、与物体(例如,图15的物体#1)的距离等进行估计。另外,在装置x200发送了通信用的调制信号的情况下,则也能够与终端进行数据通信。以下对利用通信用的调制信号来进行感测的情况进行说明。
[0249]
发送装置x201将控制信号x109以及发送数据x210作为输入,执行纠错编码处理、调制处理、预编码、多重化处理等,生成通信用的发送信号x202_1至x202_m。装置x200将发送信号x202_1至x202_m的每一个从天线x103_1至x103_m发送。
[0250]
关于发送信号以及用于发送的天线的数量,与图14中的相关说明相同,可以是2个以上的多个,也可以是1个。若与图14的相关说明进行比较,不同之处是,图14中的相关说明的发送信号包括感测信号的成分,而本说明的发送信号包括对发送数据进行调制后的信号的成分,相同之处是,通过用于发送装置x201生成发送信号的加权合成处理中所使用的系数来进行指向性控制。并且,装置x200与装置x100同样,可以仅具备一个由具备多个天线的天线单元,也可以具备多个天线单元。
[0251]
另外,在进行指向性控制的情况下,图14中说明的发送装置x101进行的指向性控制是为了向想要进行感测的方向进行发送,而图15的发送装置x201以提高与作为通信对方的终端的通信质量为目的,来进行发送的指向性控制。不过,发送装置x201也可以向想要进行感测的方向,进行发送信号的指向性控制,并且也可以是,作为通信对方的终端使用装置x200所发送的信号,在进行感测的基础上,以能够得到所期待的感测结果的方式,来进行指向性控制。在为了终端中的感测,发送装置x201进行指向性控制的情况下,发送装置x201使用由终端指定的系数来进行信号的发送。在此所发送的信号可以包括使用发送数据而被调制的信号成分,也可以不包括使用发送数据而被调制的信号成分。不包括使用发送数据而被调制的信号成分的信号例如是,前导码或基准(reference)信号等在终端侧以已知的值而别调制的信号。并且,发送装置x201在对包括使用发送数据而被调制的信号成分的信号进行发送的情况,与不包括使用发送数据而被调制的信号成分的信号的情况下,进行不同的指向性控制。
[0252]
另外,终端在接收到由装置x200发送的调制信号时,在得到数据(进行通信)的同时,也执行感测。
[0253]
并且,终端发送信号,作为通信对方的装置x200通过掌握到终端所发送的信号的变化,从而可以对物体(例如,图15的物体#1)的位置、大小、与物体(例如,图15的物体#1)的距离、物体(例如,图15的物体#1)的种类、材质等进行估计。另外,在终端发送了通信用的调制信号的情况下,也能够进行与装置x200的数据通信。
[0254]
例如,利用天线x104_1至x104_n,接收由终端发送的调制信号。于是,接收装置x206将控制信号x109以及接收信号x205_1至x205_n作为输入,进行解调处理以及纠错解码处理等,获得接收数据。并且,接收装置x206将通过接收处理而得到的传输路径特性等,作为估计信号x207来输出。
[0255]
针对n个接收信号的加权合成处理中所使用的系数能够按照接收信号x105_1至x105_n的每一个来进行设定,并且能够通过变更系数的值,来进行接收的指向性控制。系数可以被预先估计,也可以被估计成在使用接收信号x105_1至x105_n,进行加权合成后的感测信号成分的振幅或者信噪比(cnr)比使用其他的系数的情况下大、或者超过规定的阈值的系数。并且,可以通过接收装置x206使用多个与接收信号x105_1至x105_n对应的n个系数的组,来同时获得与各系数的组对应的指向性的信号。
[0256]
估计部x208将控制信号x109以及估计信号x207作为输入,使用估计信号x207来进行估计处理。估计部x208例如根据估计信号x207中包括的传输路径特性,来进行周围是否存在物体等的周围环境的估计。并且,估计部x208可以根据传输路径特性在时间上的变化,来检测物体的移动或物体的接近等。估计部x208例如可以利用music法等的波达方向估计法,来估计接收信号的波达方向,即估计反射了感测信号的物体的方向。估计部x208例如可以利用music法等的波达方向估计、天线位置(例如,发送装置和接收装置的位置)、发送指向性控制的方向的信息等,来进行三角测量,以对物体的位置进行估计。估计部x208使用接收信号,来进行物体的检测、物体的动作、物体的材质等的检测。
[0257]
估计部x208针对估计信号x207执行上述的估计处理,例如执行与想要进行的上述的物体是否存在或物体的移动的有无等的检测相对应的信号处理。此时,估计处理例如根据由信号处理而被提取的特征量是否超过规定的阈值的判断结果来执行。并且,估计处理也可以根据上述例子以外的信号处理来执行。例如,估计处理可以通过利用了多层结构的神经网络的机器学习而作成的模型来执行。在针对估计处理利用通过采用了多层结构的神经网络的机器学习而作成的模型的情况下,估计部x208可以针对估计信号x207进行规定的前处理,将前处理后的数据输入到通过利用多层结构的神经网络的机器学习而作成的模型。并且,估计部x208也可以利用在通信所使用的频带或者频带内的信道编号等信息。并且,估计部x208也可以使用发送了接收的通信用的信号的通信装置的地址、或作为该信号的发送目的地的通信装置的地址。这样,通过使用与频带或通信装置的地址等的接收的通信用的信号相关的信息,从而能够对发送了信号的通信装置的位置或信号发送时所使用的指向性等条件相同、或者类似的通信用的信号间进行比较,这样会有提高估计精确度的可能性。
[0258]
在上述的说明中,对利用通信对方发送的通信用的信号来进行感测的情况进行了说明。在图15中虽然举例示出了装置x200的如下的不同构成,即作为用于执行发送处理的
构成的发送装置x201、天线x103_1至x103_m、作为用于执行接收处理的构成的接收装置x206以及天线x104_1至x104_n,不过装置x200的构成并非受此所限。例如,发送装置x201和接收装置x206可以作为一个构成要素来实现,也可以将多个天线在发送和接收中共享。并且,与图14的说明同样,装置x200中的发送用的多个天线可以由多个天线单元构成,接收用的多个天线可以由多个天线单元构成。并且,装置x200中的发送用的多个天线以及接收用的多个天线可以由共通的收发天线部构成。
[0259]
并且也可以取代通信用的信号,而使用感测用的信号。即可以是,第1装置使用其他的装置发送的感测用的信号,来进行物体(例如,图15的物体#1)的位置、大小、与物体(例如,图15的物体#1)的距离、物体(例如,图15的物体#1)的种类、材质等估计。
[0260]
于是,使用了通信用的信号的感测方法能够以与利用图14说明的针对其他的装置发送感测信号的例子相同的目的来利用。即,装置x200不是利用从终端等其他的装置发送来的通信用的信号,根据该信号的传输路径特性等来进行周围的环境的感测,而可以用于其他的装置是否位于能够收到通信用的信号的范围的判断、或其他的装置的方向估计。
[0261]
另外,装置x200在接收作为通信对方的例如终端所发送的通信用的调制信号时,可以不进行感测的工作,而可以仅进行解调工作。
[0262]
接着将要说明的是,进行通信以及感测的装置。
[0263]
图16示出了进行通信以及感测的装置的构成的一个例子。在图16所示的构成中,对于具有与图14以及图15所示的构成相同的功能的构成赋予相同的编号,并省略对这些构成的详细说明。
[0264]
装置x300进行利用了感测用的调制信号的感测,并且进行利用了通信用的调制信号的感测。即装置x300的发送装置x301与发送装置x101同样,具有发送感测用的信号的功能,并且与发送装置x201同样,具有向其他的通信装置发送通信用的信号的功能。并且,装置x300的接收装置x306与接收装置x106同样,具有接收感测用的信号的功能,并且与接收装置x206同样,具有接收由其他的通信装置发送的通信用的信号的功能。并且,估计部x308与估计部x108同样,进行使用了感测用的信号的估计处理,并且与估计部x208同样,进行使用了通信用的信号的估计处理。
[0265]
装置x300的各构成要素所执行的处理,在发送/接收感测用信号的情况下,与图14的装置x100相同,在发送/接收通信用信号的情况下,与图15的装置x200相同。
[0266]
在图16中虽然示出了装置x300的不同构成,即示出了作为用于执行发送处理的构成的发送装置x301以及天线x103_1至x103_m、与作为用于执行接收处理的构成的接收装置x306以及天线x104_1至x104_n的不同的构成,装置x300的构成并非受此所限。例如,发送装置x301和接收装置x306可以作为一个构成要素来实现,也可以将一个以上或者多个天线在发送以及接收中共享。
[0267]
并且,装置x300除了通信用的发送装置以外,还可以另外具备感测用的发送装置。此时,通信用的发送装置与感测用的发送装置同样,可以对一个以上或者多个天线进行切换,也可以具备通信用与感测用不同的一个以上或者多个天线。另外,通信用以及感测用信号发送装置x301也可以根据控制信号x309中包括的模式的信息,对感测用的信号的发送与通信用的调制信号的发送进行切换,来从天线发送,即可以存在发送感测用的信号的模式和发送通信用的调制信号的模式。并且,通信用以及感测用发送装置x301也可以发送将感
测用的信号与通信用的调制信号合在一起的信号。
[0268]
并且,装置x300也可以与通信用的接收装置不同,另外具备感测用的接收装置。此时,通信用的接收装置与感测的接收装置同样,可以对一个以上或者多个天线进行切换,也可以在通信用与感测用中具备不同的一个以上或者多个天线。并且,装置x300可以分别具备通信用的发送装置、感测用的发送装置、通信用的接收装置、感测的接收装置。并且,装置x300也可以具备通信用的收发装置以及感测用的收发装置。并且,装置x300也可以具备通信用的收发装置、感测用的发送装置、感测用的接收装置。
[0269]
并且,即使在本实施方式中也与图14的说明以及图15的说明同样,发送用的一个以上或者多个天线可以由一个以上或者多个天线单元来构成,接收用的一个以上或者多个天线也可以由一个以上或者多个天线单元来构成。并且,发送用的一个以上或者多个天线以及接收用的一个以上或者多个天线可以由共同的收发天线部构成。
[0270]
通过采用以上这样的装置的构成,尤其能够使以后将要说明的实施方式成为可能,据此,能够得到各实施方式中所记载的效果。因此,以下对实施方法的具体的例子进行说明。
[0271]
(实施方式4)
[0272]
在本实施方式中,对具有无线通信功能的访问接入点(ap)或终端进行感测的情况下的感测方法的一个例子进行说明。
[0273]
图17示出了本实施方式中的系统构成的一个例子。在图17中,z100为访问接入点(ap),z101_1、z101_2、z101_3分别是与ap进行无线通信的终端。另外,在图17虽然示出了各终端与ap之间进行通信的情况,各终端也可以具备在终端间进行通信的功能。
[0274]
图18示出了apz100以及终端z101_1、z101_2、z101_3所具备的能够进行通信以及感测的装置的构成的一个例子。图18的装置利用能够用于与实施方式3所说明的图16的装置x300同样的通信的一个或者多个频带以及每个频带中的一个或者多个信道,来进行感测。
[0275]
图18的装置具备收发部z201、感测部z202、收发天线部z203、发送用信号选择部z204、接收用信号选择部z205、以及控制部z206。
[0276]
收发部z201进行通信用的信号的收发。收发部所进行的通信用的信号的收发处理与实施方式3中说明的发送装置x201进行的发送处理以及接收装置x206进行的接收处理相同。
[0277]
感测部z202根据接收信号进行感测。感测部z202可以执行发送实施方式3中所说明的感测用的信号,利用接收的反射信号来进行感测的感测方法,或者可以执行利用从实施方式3中所说明的终端或ap等其他的通信装置接收的通信用的信号,来进行感测的感测方法。并且,感测部z202也可以执行发送感测信号的感测方法与利用了接收的通信用的信号的感测方法这双方。在执行对感测信号进行发送的感测方法的情况下,感测部z202进行与实施方式1中的发送装置x101同样的处理,生成感测用的信号并输出。另外,感测部z202也可以不执行对感测信号进行发送的感测方法,在仅执行利用了通信用的信号的感测方法的情况下,感测部z202也可以不发送信号。
[0278]
收发天线部z203进行信号的收发。发送用信号选择部z204将在收发部z201以及感测部z202生成的信号,从收发天线部z203发送。接收用信号选择部z205将由收发天线部
z203接收的信号输入到收发部z201以及感测部z202。控制部z206生成用于对收发部z201、感测部z202、发送用信号选择部z204、接收用信号选择部z205的工作进行控制的控制信号,对进行通信的频率以及期間、以及进行感测的频率以及期間进行控制等。另外,发送用信号选择部z204也对感测用的信号与通信用的信号进行组合,生成依照了帧的信号,进行输出。并且,接收用信号选择部z205也根据接收信号,生成通信用的信号、感测用的信号,并对这双方进行输出。
[0279]
图19至图37是本实施方式中的装置进行收发的帧的结构的例子。从图19至图37中,横轴为时间,在图19、图20、以及图22至图37中,纵轴为频率。纵轴的频率例如可以是ofdm(orthogonal frequency division multiplexing)信号的子载波等,也可以是一个频带中的一个信道内的频率,并且可以是一个或者多个频带内的多个信道。并且,纵轴的频率可以是跨在多个信道上的ofdm信号的多个子载波。因此,可以是单载波传输方式,也可以是ofdm等多载波传输方式。并且,在用于感测的帧、用于感测的信号的情况下,例如可以是被频带限制的脉冲信号,也可以是单音信号或载波。因此,在将图19至图37的帧用于通信以及/或者感测的情况下,图19的帧可以不是单载波传输方式的信号、也可以不是多载波传输方式信号。
[0280]
图19至图37示出的基准码元是用于本实施方式中的装置执行感测的码元。另外,基准码元也可以具有用于“通信对方进行信号检测、时间同步、频率同步、信道估计等”的功能。并且,基准码元也可以是用于进行数据通信的手续中所需要的控制信息、mac(media access control)帧。
[0281]
控制信息码元例如是用于通知数据码元中的通信方法的码元。因此,控制信息码元例如包括纠错编码方法(编码率、块长(码长)、纠错码的信息等)的信息、调制方式的信息、发送方法的信息(例如,利用了单流传输或者多流传输的哪一个的信息)(mcs(modulation and coding scheme:调制与编码策略)的信息)、数据长等的信息。
[0282]
数据码元是用于向通信对方传输数据的码元。
[0283]
防护区间是紧接在基准信号之后而被配置的用于对感测进行辅助的区间。防护区间例如是为了回避被配置在该防护区间的前后的信号或码元彼此间的干扰而被设置的,或者是为了对防护区间前的码元与防护区间后的码元的发送指向性、接收指向性进行变更而被设置。例如,防护区间可以不存在信号。另外,针对帧可以不设置防护区间。感测部z202被用于在防护区间,获得例如自身通信装置或者其他通信装置没有发送感测用的信号或者通信用的信号的状态下的信号的接收状态。
[0284]
另外,图19至图37所示的帧结构仅为一个例子,帧结构并非受此所限。例如,帧内也可以包括其他的码元。并且,在发送帧时可以采用单载波传输方式,也可以采用ofdm等多载波传输方式。
[0285]
在基准码元中可以包括传输数据的区域。在该传输数据的区域中,可以包括用于识别发送信号用于“是发送通信用的信号”、或者“是发送用于物体检测的信号”的数据。
[0286]
并且,在此虽然称为基准码元,名称并非受此所限,也可以将基准码元称为导频码元、训练码元、训练字段、前导码、控制信息码元、midamble码(中间码)等。例如,可以利用导频码元、训练码元、训练字段、前导码、控制信息码元、midamble码等来执行感测。
[0287]
图19是本实施方式的装置进行通信时的帧结构。
[0288]
图19所示的帧包括前导码、控制信息码元、数据码元。
[0289]
图20示出了本实施方式的装置进行感测时的帧结构。
[0290]
图20的左侧示出了为了进行感测而发送的基准码元的帧结构。图20的左侧所示的帧包括基准码元。
[0291]
图20的右侧示出了针对用于感测的基准码元而附加的前导码、控制信息码元。图20的右侧所示的帧包括前导码、控制信息码元、基准信号。
[0292]
对图20的右侧的帧进行接收的装置例如即使是仅具备通信功能的装置,通过接收前导码、控制信息码元,也能够知道感测的信号的存在,据此,能够得到的效果是,该装置能够对调制信号的发送定时进行控制,以便不发生干扰。此时的信号的存在例子由图21示出。
[0293]
如图21所示,在某个频带能够存在通信用的调制信号和感测用的调制信号。
[0294]
另外,本实施方式的装置也可以是能够进行图19的帧的收发的仅具备通信功能的装置。
[0295]
并且,本实施方式的装置也可以是能够进行图20的帧的收发的仅具备感测的功能的装置。
[0296]
本实施方式的装置也可以是能够进行图22至图37的帧的收发的对通信和感测进行并行处理的装置。关于图22至图37的帧将在以后说明。另外,图22至图37示出了能够进行感测的帧的例子,除了感测以外还有能够进行通信的情况。并且,在图22至图37的帧中,虽然有存在防护区间的帧,即使不存在防护区间也能够执行。另外,在考虑图22至图37的帧的基础上,考虑图17的状态。而且,能够将ap作为中继器来考虑。图22所示的帧包括前导码、控制信息码元、数据码元、midamble码、以及数据码元。此时,midamble码是用于数据码元的解调的码元以及/或者用于感测的码元。关于这一点在其他的附图中也是同样。并且,前导码虽然是为了实现通信而被配置的,也可以为了进行感测,而由装置来使用前导码以及/或者控制信息码元。关于这一点在其他的附图中也是同样。
[0297]
图23所示的帧包括前导码、控制信息码元、数据码元、midamble码、以及数据码元。并且,在midamble码与数据码元之间设置防护区间。另外,在防护区间前的码元与防护区间后的码元中,发送指向性可以不同。关于这一点在其他的附图中也是同样。并且,可以在midamble码之前设置防护区间。而且,也可以是不存在防护区间的帧。关于这一点在其他的附图中也是同样。
[0298]
图24所示的帧包括前导码、控制信息码元、数据码元、以及基准信号。数据码元被配置在彼此不同的2个频带f81以及f83。基准信号被配置在与配置了数据码元的频带不同的频带f82。并且,基准信号在频带f82以空出时间间隔的方式而被配置了3个。在基准信号之间设置防护区间。即3个基准信号夹着防护区间而被配置。另外,基准信号被用于感测。另外,关于这一点,在其他的附图中也是同样。并且,防护区间前的基准信号与防护区间后的基准信号的发送指向性可以不同。另外,关于这一点,在其他的附图中也是同样。
[0299]
于是,在2个以上的频带或者2个以上的信道中配置数据码元或基准信号的情况下,可以采用通过ofdma(orthogonal frequency division multiple access)方式的多路访问。在这种情况下,数据码元或基准信号在时间方向以及频率方向上被分别配置在指定的范围。在此,将上述范围也称为由时间以及频率规定的资源即时间频率资源。并且,将包括通信数据的码元被配置的时间频率资源称为通信用资源,将用于通过电波来进行感测的
码元被配置的时间频率资源称为感测用资源。以后也是同样。
[0300]
图25所示的帧包括前导码、控制信息码元、数据码元、以及基准信号。数据码元被配置在彼此不同的5个频带f91至f95。基准信号被配置在频带f92以及f94。在频带f92以及f94,在基准信号与数据码元之间设置了防护区间。如频带f92、f94所示,在一部分的频率资源中,数据码元与基准信号可以混在。这样,能够得到提高频率利用效率的效果。另外,防护区间前后的基准信号与数据码元的发送指向性可以不同。关于这一点,在其他的附图中也是同样。
[0301]
图26所示的帧包括前导码、控制信息码元、数据码元、以及基准信号。数据码元被配置在频带f101以及f103至f105。基准信号在频带f102中,以夹着防护区间的方式而被配置3个。并且,从频带f101直到f105配置了基准信号。在该基准信号之后,在频带f101至f103以及f105配置了数据码元,在频带f104中,基准信号以夹着防护区间的方式被配置2个。一个具有特点之处是,存在宽频带的基准信号和窄频带的基准信号。据此,能够进行高精确度的感测的可能性增高。
[0302]
图27所示的帧包括前导码、控制信息码元、给用户的数据码元。给用户的数据码元包括将用户#1、#2、#3以及#4作为发送目的地的数据码元,分别被配置在频带f111、f112、f113以及f114。该帧结构能够考虑为是ofdma的帧的例子。例如能够考虑为是ap、中继器等发送的帧。
[0303]
图28所示的帧包括前导码、控制信息码元、给用户的数据码元、以及midamble码。给用户的数据码元包括以用户#1、#2、#3以及#4为发送目的地的数据码元,分别被配置在频带f121、f122、f123以及f124。并且,给用户的数据码元以夹着midamble码的方式而被配置。该帧结构能够考虑为是ofdma的帧的例子。例如能够考虑为是ap、中继器等发送的帧。
[0304]
图29所示的帧包括前导码、控制信息码元、给用户的数据码元、以及midamble码。给用户的数据码元包括以用户#1、#2、#3以及#4为发送目的地的数据码元,分别被配置在频带f131、f132、f133以及f134。给用户的数据码元以夹着midamble码的方式而被配置。在midamble码与给用户的数据码元之间设置防护区间。另外,可以在midamble码之前设置防护区间。该帧结构能够考虑为是ofdma的帧的例子。例如,能够考虑为是ap、中继器等发送的帧。
[0305]
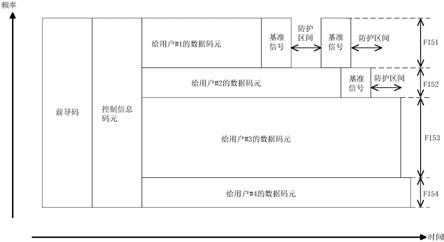
图30所示的帧包括前导码、控制信息码元、给用户的数据码元、以及基准信号。给用户的数据码元包括以用户#1、#3以及#4为发送目的地的数据码元,分别被配置在频带f141、f143以及f144。在频带f142中,3个基准信号以夹着防护区间的方式而被配置。在利用ofdma的情况下,会有不被用于给用户的数据码元的频带(例如图30中的频带f142)的情况,在这种情况下,在不被用于给用户的数据码元的频带配置基准信号。另外,频带f142能够用于对某个给用户的数据码元进行的传输中。并且,例如能够考虑为是ap、中继器等发送的帧。图31所示的帧包括前导码、控制信息码元、给用户的数据码元、以及基准信号。给用户的数据码元包括以用户#1、#2、#3以及#4为发送目的地的数据码元,分别被配置在频带f151、f152、f153以及f154。并且,在频带f151中,在给用户#1的数据码元之后,以夹着防护区间的方式配置2个基准信号。在频带f152中,在给用户#2的数据码元之后配置基准信号,在该基准信号之后设置防护区间。
[0306]
在利用ofdma的情况下,给用户的数据码元的时间长度会有因每个用户而不同的
情况,在这种情况下,在没有被用于给用户的数据码元的频带以及时间段配置基准信号。例如,与给用户#4的数据码元的时间长度相比,给用户#1的数据码元的时间长度短,能够利用给用户#1的数据码元后的时间,发送基准码元。另外,例如能够考虑为是ap、中继器等发送的帧。图32所示的帧包括前导码、控制信息码元、给用户的数据码元、以及基准信号。给用户的数据码元包括以用户#1、#3以及#4为发送目的地的数据码元,分别被配置在频带f161、f163以及f164。并且,基准信号被配置在从频带f161到f164,在该基准信号之后设置防护区间。在频带f162,在基准信号之间设置防护区间。例如,能够考虑为是ap、中继器等发送的帧。
[0307]
图33所示的帧包括前导码、控制信息码元、给用户的数据码元、以及基准信号。给用户的数据码元包括以用户#1、#2、#3以及#4为发送目的地的数据码元,分别被配置在频带f171、f172、f173以及f174。并且,基准信号被配置在从频带f171至f174,在该基准信号之后设置防护区间。在频带f171,在防护区间之后配置给用户#1的基准信号,在此之后设置防护区间。在频带f172,在防护区间之后配置给用户#2的基准信号,在此之后设置防护区间。在频带f171和f172,给用户的数据码元、基准信号以及防护区间的时间长度彼此不同。例如,能够考虑为是ap、中继器等发送的帧。
[0308]
图34所示的帧是终端所发送的帧结构例,例如是由用户#1所持有的终端发送的帧的结构例,包括前导码、控制信息码元、(由用户#1所持有的终端发送的)数据码元。(由用户#1所持有的终端发送的)数据码元被配置在频带f181。频带f182没有被分配给用户#1所持有的终端。不过,频带f182能够用于其他的用户所持有的终端(用户#1以外的终端)对数据码元、基准信号进行的发送中。
[0309]
图35所示的帧是终端所发送的帧结构例,例如是由用户#1所持有的终端发送的帧的结构例,包括前导码、控制信息码元、(由用户#1所持有的终端发送的)数据码元、以及基准信号。(由用户#1所持有的终端发送的)数据码元被配置在频带f191。频带f192没有被分配在用户#1所持有的终端。并且,在由用户#1所持有的终端发送的数据码元之后,设置基准信号以及防护区间。并且,在下一个由用户#1所持有的终端发送的数据码元之后,设置基准信号以及防护区间。不过,频带f192能够用于其他的用户所持有的终端(用户#1以外的终端)对数据码元、基准信号进行的发送中。
[0310]
图36所示的帧是终端所发送的帧结构例,例如是由用户#1所持有的终端发送的帧的结构例,包括前导码、控制信息码元、(由用户#1所持有的终端发送的)数据码元、以及基准信号。(由用户#1所持有的终端发送的)数据码元被配置在频带f201以及f202。频带f203没有被分配在用户#1所持有的终端。并且,在频带f201,与图35的频带f191同样,在(由用户#1所持有的终端发送的)数据码元之后,设置基准信号以及防护区间,在下一个(由用户#1所持有的终端发送的)数据码元之后设置基准信号以及防护区间。在频带f202,与图34的频带f181同样,配置了(由用户#1所持有的终端发送的)数据码元,没有设置基准信号以及防护区间。不过,频带f203能够用于其他的用户所持有的终端(用户#1以外的终端)对数据码元、基准信号进行的发送中。
[0311]
图37所示的帧是由终端发送的帧结构例,例如是由用户#1所持有的终端发送的帧的结构例,包括前导码、控制信息码元、(由用户#1所持有的终端发送的)数据码元、以及基准信号。(由用户#1所持有的终端发送的)数据码元被配置在频带f211以及f212。频带f213
没有被分配在用户#1所持有的终端。并且,在频带f211,与图35的频带f191同样,在(由用户#1所持有的终端发送的)数据码元之后设置基准信号以及防护区间,在下一个(由用户#1所持有的终端发送的)数据码元之后也设置基准信号以及防护区间。在频带f212,配置了(由用户#1所持有的终端发送的)的数据码元与基准信号。不过,频带f213能够用于其他的用户所持有的终端(用户#1以外的终端)对数据码元、基准信号进行的发送中。作为一个特点是,宽频带的基准信号与在频带的基准信号均存在。据此,能够以更高的精确度来进行感测的可能性增高。
[0312]
本实施方式的装置也可以是能够进行图19的帧、或图20的帧的收发的处理的装置。
[0313]
本实施方式的装置也可以是能够进行图19的帧、图22至图37的帧的收发的处理的装置。
[0314]
本实施方式的装置也可以是能够进行图20的帧、图22至图37的帧的收发的处理的装置。
[0315]
本实施方式的装置也可以是能够进行图19的帧、图20的帧、图22至图37的帧的收发的处理的装置。
[0316]
另外,在本实施方式的装置例如发送图19至图37的帧的情况下,本实施方式的装置可以从一个天线发送图19至图37的帧,并且,本实施方式的装置也可以从多个天线发送图19至图37的帧。
[0317]
并且,在本实施方式的装置例如接收图19至图37的帧的调制信号的情况下,本实施方式的装置可以由一个天线来接收图19至图37的帧的信号,并且,本实施方式的装置也可以由多个天线来接收图19至图37的帧的信号。因此,作为传输方式,可以是siso(single-input single-output)、miso(multiple-input single-output)、simo(single-input multiple-output)、mimo(multiple-input multiple-output)的任一个方式。
[0318]
通过以上所述,能够得到的效果是,ap(或者中继器)、终端能够执行感测以及通信。
[0319]
如以上所述,发送装置具备帧构成部以及发送部,帧构成部构成依照了ofdma方式的且包括多个由时间以及频率规定的资源即时间频率资源,发送部将由帧构成部构成的帧通过电波来发送,帧构成部将包括通信用资源和感测用资源的帧作为上述帧来构成,通信用资源是配置了包括通信数据的码元的时间频率资源,感测用资源是配置了用于通过发送部所发送的电波来进行感测的码元的时间频率资源。
[0320]
例如,上述帧可以至少包括2个感测用资源,上述2个感测用资源的时间不同而频率相同,并且2个感测用资源以夹着防护区间的方式在时间方向上相邻配置。例如,图30的频带f142中的基准信号相当于上述2个感测用资源。
[0321]
例如,上述帧可以至少包括2个防护区间,上述2个防护区间的时间长度不同,并且频率也不同。例如,图33的频带f171的防护区间、以及频带f172的防护区间相当于上述2个防护区间。
[0322]
例如,上述帧可以至少包括2个感测用资源,上述2个感测用资源的频率不同,且时间长度也不同。例如,图33的频带f171的基准信号、以及频带f172的基准信号相当于上述2个感测用资源。
[0323]
而且,上述感测处理至少包括通过对由接收部接收的反射波进行解析,而进行的检测物体的位置的处理、检测物体的有无的处理、或检测物体的外形的处理中的一个处理。
[0324]
(实施方式5)
[0325]
在本实施方式中将要对一控制系统进行说明,该控制系统利用实施方式1至4说明的检测装置等,对设备的工作进行控制。
[0326]
本实施方式中的检测装置进一步具备控制部,根据通过处理部进行的感测处理的结果,对电气设备的驱动进行控制。于是,本实施方式的控制系统具备检测装置和上述电气设备。
[0327]
图38示出了本实施方式中的控制系统的构成的一个例子。
[0328]
图38所示的控制系统具备设备a11、以及检测装置a12。在此,设备a11是能够在设备a11的装置的控制下来动作的电气设备,例如是电动摩托车、电动滑板车、吸尘器、电动车等。并且,设备a11是智能手机或平板电脑等的信息处理装置。
[0329]
设备a11具备接口#1和#2、控制部a111、驱动部a112、传感器a113、以及通信部a114。
[0330]
接口#1以及#2是与检测装置a12进行通信的接口装置。接口#1以及#2在图38的例子中,是不经由中继装置等其他的装置来进行通信的接口。另外,在此的通信例如可以是bluetooth(注册商标)、无线lan、光通信等无线通信,并且例如也可以是usb(universal serial bus)、plc(power line communication)等有线通信。并且,与图38的例子不同,可以经由中继器等其他的装置。接口#1从检测装置a12的接口#3接收信号(也称为第1信号)。接口#2向检测装置a12的接口#4发送信号(也称为第2信号)。另外,接口#1也可以从检测装置a12接收电力的供给。
[0331]
控制部a111是进行驱动部a112的驱动的控制、以及传感器a113的控制的处理部。控制部a111经由接口#1来接收来自检测装置a12的信号,根据接收的信号,进行驱动部a112的驱动的控制、以及传感器a113的控制。并且,控制部a111获得示出驱动部a112以及传感器a113的状态等的信息,经由接口#2发送到检测装置a12。另外,控制部a111可以经由通信部a114,来获得用于使控制部a111工作的软件程序。
[0332]
驱动部a112是使设备a11驱动的处理部。驱动部a112例如包括用于使设备a11移动的车轮、对车轮的朝向进行控制的掌舵装置、对车轮的转速进行控制的加速装置或制动装置等。驱动部a112也可以进一步具备作为用于车轮的驱动的动力源的电池等。驱动部a112通过由控制部a111进行的控制来工作,使设备a11的移动速度加速或减速,并且变更移动方向。并且,驱动部a112将示出驱动部a112的状态等的信息输出到控制部a111。
[0333]
传感器a113是对设备a11的周围进行感测的传感器。传感器a113例如是对温度、湿度或照度等进行计测的传感器、或者是对到周围的物体的距离进行测量的距离传感器。传感器a113通过控制部a111进行的控制来工作,将传感器值等输出到控制部a111。
[0334]
通信部a114是与ap(访问接入点)间进行无线通信的通信接口。不过,虽然记载为ap,也可以是基站、通信装置等。
[0335]
检测装置a12具备:接口#3和#4、控制部a121、处理部a122、图像传感器a123、应用存储部a124、通信部#1和#2、以及感测部a125。
[0336]
接口#3以及#4是与设备a11进行通信的接口装置。接口#3以及#4在图38的例子中,
是不经由中继装置等其他的装置来进行通信的接口。另外,在此的通信例如可以是bluetooth(注册商标)、无线lan、光通信等无线通信,并且,例如也可以是usb、plc等有线通信。并且,也可以与图38的例子不同,经由中继器等其他的装置。接口#3向设备a11的接口#1发送信号。接口#4从设备a11的接口#2接收信号。另外,接口#3也可以向设备a11供给电力。
[0337]
控制部a121是对设备a11的工作进行控制的处理部。控制部a121从设备a11,经由接口#4,例如获得由传感器a113获得的传感器值、或示出驱动部a112的状态等的信息,根据获得的传感器值或信息,生成对驱动部a112的驱动以及/或者对控制部a111进行控制的信号。控制部a121将生成的信号经由接口#3,发送到设备a11,例如对控制部a111以及/或者驱动部a112进行控制。
[0338]
对其他的方法进行说明。控制部a121是对设备a11的工作进行控制的处理部。控制部a121将由感测部a125获得的传感器值,经由处理部a122来获得,根据获得的传感器值,生成对驱动部a112的驱动以及/或者控制部a111进行控制的信号。另外,控制部a121在生成对驱动部a112的驱动以及/或者控制部a111进行控制的信号时,也可以使用从驱动部a112以及/或者传感器a113得到的信息。于是,控制部a121将生成的信号经由接口#3发送到设备a11,例如对控制部a111以及/或者驱动部a112进行控制。
[0339]
处理部a122是进行检测装置a12中的信息处理的运算装置。处理部a122例如由cpu构成。
[0340]
图像传感器a123是对检测装置a12的周围进行拍摄,并生成图像的传感器。图像传感器a123将与生成的图像相关的数据提供到处理部a122。
[0341]
应用存储部a124是存储用于设备a11或检测装置a12的控制的应用(软件程序)的存储装置。应用存储部a124例如经由通信部#1或#2,来获得上述应用(软件程序)。
[0342]
另外,通过对应用进行更新,从而控制部a121的控制的精确度提高,这样,能够得到由设备a11、检测装置a12构成的系统的驱动关联中的安全性提高的效果。
[0343]
通信部#1是与ap(访问接入点)之间进行无线通信的通信接口。
[0344]
通信部#2是与便携式电话的运营商网络的基站之间进行无线通信的通信接口。
[0345]
感测部a125是利用用于通信的电波来进行感测的处理部。感测部a125对检测装置a12的周围的物体进行检测并对上述物体的工作进行识别,具体而言,周围的物体是指人、车辆、自行车、障碍物等。感测部a125可以通过发送与通信部#1相同的频率的电波来实现。
[0346]
在图38所示的控制系统中,设备a11可以搭载检测装置a12,也可以被配置在与检测装置a12分离的位置。
[0347]
在设备a11搭载了检测装置a12的情况下,设备a11由通过通信部a114、或者接口#1或#2而被收发的信号控制。
[0348]
例如,在经由接口#1或#2而设备a11被控制的情况下,在用户外出时使用的情况下,可以将检测装置a12搭载于设备a11。
[0349]
并且,例如在经由通信部a114而设备a11被控制的情况下,设备a11根据经由ap(访问接入点)而从检测装置a12发送的信号,而被控制。不过,在经由通信部a114进行设备a11的控制的情况下,有可能会受到功能限制。另外,在由设备a11经由通信部a114来与检测装置a12进行通信的情况下,不是经由ap(访问接入点)来进行通信,而是在检测装置a12的通信部#1之间直接进行通信。
[0350]
根据本构成,通过对检测装置a12侧的应用进行更新,从而能够进行功能的更新、控制算法的更新。这样,能够得到的效果是,能够通过应用的更新来提供新的功能。
[0351]
并且,通过针对检测装置a12来安装新的应用,从而能够将以往的设备a11的控制中没能利用的智能手机或平板电脑等的装置,利用到设备a11的控制。通过此构成,能够将以往的装置等利用于设备a11的控制。这样,例如即使没有被使用而处于放置状态的装置也能够被利用,从而能够得到没有被使用的装置所具备的cpu、gpu、内存、存储装置、调制解调器或显示器等浪费的资源能够被活用的效果。
[0352]
另外,不仅是检测装置a12侧,即使在设备a11侧,也能够进行固件或应用的更新。通过此构成,能够提供仅检测装置a12侧的应用的更新不能对应的新的功能,或者在发现了设备a11侧的安全上的问题的情况下等,能够提供解除安全上的问题的固件或应用,从而能够迅速的采取措施。应用经由通信部#1、通信部#2,例如从云服务器等外部的装置来获得。
[0353]
接着将要说明的是,以设备a11搭载了检测装置a12的状态,在用户外出时,对设备a11进行控制的控制系统的构成的一个例子。
[0354]
图39示出了本实施方式中的控制系统的构成的一个例子。
[0355]
图39所示的控制系统具备设备a11、检测装置a12、a21的ap、网络a22、基站a23、以及装置a24。
[0356]
设备a11与检测装置a12经由接口#1、#2、#3以及#4,信号的收发。另外,关于详细工作已经进行了说明。
[0357]
a21的ap是可以与检测装置a12的通信部#1连接的访问接入点。
[0358]
网络a22是与a21的ap连接,并且与基站a23连接的网络。网络a22可以包括便携式电话的运营商网络的一部分、或互联网的一部分。并且,可以与包括执行信息处理的服务器的云服务器连接。
[0359]
基站a23例如是与便携式电话的运营商网络连接的基站装置,与装置a24连接。
[0360]
装置a24例如是用户所持有的智能手机或平板电脑等可携带的信息处理装置。
[0361]
在控制系统中,检测装置a12由通信部#1经由apa21、网络a22以及基站a23,以能够与装置a24进行通信的方式而被连接。
[0362]
例如,针对吸尘器等设备a11,检测装置a12经由接口#1、#2、#3以及#4来连接。装置a24例如经由一个以上的网络,来向被搭载于设备a11的检测装置a12进行接入,经由检测装置a12来控制设备a11。
[0363]
本控制系统的特点之一是,利用由检测装置a12所具备的感测部a125感测到的数据,来进行设备a11的控制。通过此构成,能够在设备a11的控制中使用由设备a11不具备的传感器感测的数据。据此,仅以设备a11不能实现的功能也可能够实现。
[0364]
并且,设备a11经由接口#1以及/或者#2,获得由检测装置a12的感测部a125感测的数据,据此,与通过通信部a114经由网络来获得数据的情况相比,能够使安全性提高,并且能够提供在安全上受到限制的情况下而不能实现的功能。
[0365]
并且,本控制系统的特点之一是,经由被搭载于设备a11的检测装置a12,来进行设备a11的控制。通过此构成,能够将是否接受到从装置a24发送的控制用的指示这种判断,在检测装置a12执行。例如,通过在装置a24与检测装置a12之间进行认证等处理,从而能够提高针对不正当访问的安全性。
[0366]
而且,如以前所述,通过对应用存储部a124中的应用进行更新,能够提高控制部a121的控制的精确度,这样,能够得到的效果是,能够提高由设备a11、检测装置a12构成的系统的驱动关联中的安全性。
[0367]
图40示出了本实施方式中的控制系统的外观的一个例子。
[0368]
图40所示的控制系统是在相当于设备a11的电动滑板车上搭载了检测装置a12的系统。检测装置a12根据通过感测部a125进行的感测的结果,例如进行设备a11的加速、减速等控制。
[0369]
电动滑板车例如可以按照设备a11(即电动滑板车)侧或者检测装置a12侧的采用了操作输入用的输入部的用户的输入,而能够对驱动部a112进行控制。
[0370]
控制部a121对驱动部a112进行控制,来进行设备a11(即电动滑板车)的加速或者行进方向的变更等工作。并且也可以是,控制部a121对驱动部a112进行控制,来进行设备a11的减速。减速可以由制动器来实现,也可以利用发电机等制动力来实现。
[0371]
在此,控制部a121可以按照来自输入部的输入,来进行驱动部a112的控制,并可以根据从设备a11以及/或者感测部a125获得的感测数据,来进行驱动部a112的控制。
[0372]
例如,感测部a125进行采用了电波的感测。另外,关于采用了电波的感测方法,与其他的实施方式中的说明相同。例如,感测部a125进行感测,对人进行检测。控制部a121根据从感测部a125得到的“对人进行检测”这一信息,将包括对速度进行减速这一信息的控制信号,经由接口#3、接口#4传输到设备a11。并且,设备a11的控制部a111、驱动部a112进行减速控制。
[0373]
并且,感测部a125进行采用了电波的感测,对前方没有障碍物进行检测。控制部a121根据从感测部a125得到的“没有障碍物”这一信息,进行速度的加速,在此之后将包括进行单倍速行驶的这一信息的控制信号,经由接口#3、接口#4,传输到设备a11。同时,设备a11的控制部a111、驱动部a112在加速后,进行单倍速行驶这种控制。
[0374]
并且,感测部a125进行采用了电波的感测,视为检测到在右侧有障碍物。控制部a121根据从感测部a125得到的“在右侧有障碍物”这一信息,将包括进行避开障碍物的动作这一信息的控制信号,经由接口#3、接口#4传输到设备a11。同时,设备a11的控制部a111、驱动部a112进行避开障碍物这种动作的控制。
[0375]
对其他的工作例进行说明。感测部a125可以进行采用了电波的感测,根据感测的结果的信息,控制部a121进行自身位置估计或障碍物检测,并可以输出用于进行加速或减速的控制的控制信号。此时,控制部a121能够利用从图像传感器a123得到的图像信息、从传感器a113得到的信息,来进行自身位置估计或障碍物检测。控制部a121将该控制信号经由接口#3、接口#4传输到设备a11。同时,设备a11的控制部a111、驱动部a112进行基于控制信号的控制。
[0376]
作为基于从感测部a125获得的感测数据的控制的另一个例子,控制部a121根据由速度传感器或加速度传感器获得的速度或加速度的数据,来检测用户的工作,并进行加速或减速的控制。在此,作为利用感测部a125而被检测的用户的工作,虽然是用户登地面的动作,也可以是除此以外的动作。例如,可以是用户移动身体的重心,也可以是用户的脸的朝向或用户的脸的朝向的变化。此时,作为感测部a125能够使用的传感器可以是重量传感器或无线雷达通过电波来进行感测。
[0377]
通过以上这样的控制,能够得到提高用户的安全性的效果。
[0378]
图41示出了本实施方式中的控制系统的处理的一个例子。利用流程图对控制部a121进行的控制工作的上述的例子中的控制的一个例子进行说明。
[0379]
设备a11例如以如下的时刻来开始流程图的控制工作,这些时刻是指,用户通过开关或按键来执行控制工作的开始的时刻、用户接通设备a11的电源的时刻、用户将检测装置a12装配到设备a11的时刻、或者检测到用户搭乘作为设备a11的滑板车的时刻。
[0380]
在步骤s001,控制部a121在开始控制工作时,从设备a11所具备的传感器a113以及/或者检测装置a12所具备的感测部a125,获得加速度数据。
[0381]
在步骤s002,控制部a121根据加速度数据,来检测设备a11的加速动作。在检测到加速度动作的情况下(步骤s002的“是”),移向步骤s003,在没有检测到加速动作的情况下(步骤s002的“否”),移向步骤s004。
[0382]
在步骤s003,控制部a121对驱动部a112进行控制,执行辅助处理,例如使电动机旋转,从而产生向行进方向加速的力。关于用于加速的力的产生,例如在根据加速度数据判断为进行了加速的时刻,直到为了进一步提高加速度而决定的时间内被进行,也可以是在加速被执行后,在加速结束的时刻或开始减速的时刻,通过在决定的时间内维持速度而被进行。在步骤s003的辅助处理结束时,返回到步骤s001。
[0383]
在步骤s004,控制部a121判断是否结束驱动部a112的控制,在结束驱动部a112的控制的情况下结束处理,在不结束驱动部a112的控制的情况下返回到步骤s001。关于是否结束驱动部a112的控制的判断,例如可以在设备a11完全停止了的情况下,判断为结束驱动部a112的控制,也可以在用户断开设备a11的电源的情况下、用户从设备a11取下检测装置a12的情况下、或者检测到用户从作为设备a11的滑板车下来的情况下,判断为结束驱动部a112的控制。
[0384]
对图41的其他的工作进行说明。设备a11例如在如下的时刻,开始流程图的控制工作,这些时刻是指,用户通过开关或按键指示了控制工作的开始的时刻、用户接通设备a11的电源的时刻、用户将检测装置a12装配到设备a11的时刻、或者检测到用户搭乘到作为设备a11的滑板车的时刻。
[0385]
在步骤s001,控制部a111在开始控制工作时,从设备a11所具备的传感器a113获得加速度数据。
[0386]
在步骤s002,控制部a111根据加速度数据,来检测设备a11的加速动作。在检测到加速度动作的情况下(步骤s002的“是”)移向步骤s003,在没有检测到加速动作的情况下(步骤s002的“否”)移向步骤s004。
[0387]
在步骤s003,控制部a111对驱动部a112进行控制,执行辅助处理,例如使电动机旋转,而产生向行进方向加速的力。加速力的产生例如可以在根据加速度数据判断为进行了加速的时刻,直到决定进一步提高加速度的时间内被进行,也可以在进行了加速后,在加速结束的时刻或开始减速的时刻,以在被决定的时间内维持速度的方式而被进行。在步骤s003的辅助处理结束时,返回到步骤s001。
[0388]
在步骤s004,控制部a111判断是否结束驱动部a112的控制,在结束驱动部a112的控制的情况下结束处理,在不结束驱动部a112的控制的情况下返回到步骤s001。是否结束驱动部a112的控制的判断例如可以在设备a11完全停止的情况下,判断为结束驱动部a112
的控制,也可以在用户断开设备a11的电源的情况下、用户从设备a11取下检测装置a12的情况下、或者检测到用户从作为设备a11的滑板车下来的情况下,判断为结束驱动部a112的控制。
[0389]
通过进行基于用户的动作的加速的辅助,从而能够进行与用户的动作对应的详细的控制,由于能够防止不希望的加速,从而能够得到提高安全性的效果。
[0390]
(实施方式6)
[0391]
在本实施方式中,对上述实施方式中的发送装置的构成以及处理的其他的形态进行说明。
[0392]
图42示出了本实施方式6中的发送装置a3的构成的一个例子。
[0393]
如图42所示,发送装置a3具备帧构成部a31、发送部a32、接收部a33、以及处理部a34。
[0394]
帧构成部a31构成依照了单载波方式、或者ofdm这种多载波方式、或者ofdma(orthogonal frequency-division multiple access)方式的帧,且该帧包括多个由时间以及频率规定的资源即时间频率资源。
[0395]
帧构成部a31将包括通信用资源和感测用资源的帧作为上述帧来构成,通信用资源是配置了包括通信数据的码元的时间频率资源,时间频率资源是配置了用于通过由发送部a32发送的电波来进行感测的码元的感测用资源。
[0396]
发送部a32将由帧构成部a31构成的帧,通过电波来发送。
[0397]
图43示出了实施方式6中的发送装置的处理的一个例子。
[0398]
如图43所示,在步骤s1(帧构成步骤)中,构成依照了单载波方式、或者ofdm这种多载波方式、或者ofdma方式的帧,且该帧包括多个通过时间以及/或频率规定的资源即时间频率资源。在此,在帧构成步骤中,将包括通信用资源和感测用资源的帧作为上述帧来构成,通信用资源是配置了包括通信数据的码元的时间频率资源,感测用资源是配置了由在发送步骤发送的电波进行的感测的码元的时间频率资源。
[0399]
在步骤s2(发送步骤),将在帧构成步骤构成的帧通过电波来发送。
[0400]
据此,发送装置能够进行周围的感测。
[0401]
(实施方式7)
[0402]
在本实施方式中,对能够进行感测的装置的具体的实施例进行说明。
[0403]
图44示出了具有通信功能和感测功能这双方的装置的构成的一个例子。
[0404]
收发部n102将数据n101以及控制信号n100作为输入。于是,在控制信号n100示出“执行通信”的情况下,收发部n102针对数据n101进行纠错编码、调制等的处理,并输出调制信号n103。另外,在控制信号n100示出“执行感测”的情况下,收发部n102不进行工作。
[0405]
感测部n104将控制信号n100作为输入,在控制信号n100示出“执行感测”的情况下,感测部x204输出感测用信号n105。另外,在控制信号n100示出“执行通信”的情况下,感测部n104例如不进行工作。
[0406]
并且,感测部n104将与动作有关的信号n180作为输入,根据与动作有关的信号n180,来决定感测工作,并根据该决定来进行工作。关于详细将在以后说明。
[0407]
发送用信号选择部n106将控制信号n100、调制信号n103、感测用信号n105作为输入。于是,在控制信号n100示出“执行通信”的情况下,发送用信号选择部n106将调制信号
n103作为选择的信号n107来输出。并且,在控制信号n100示出“执行感测”的情况下,发送用信号选择部n106将感测用信号n105作为选择的信号n107来输出。
[0408]
功率调整部n108将选择的信号n107、控制信号n100作为输入。在控制信号n100示出“执行通信”的情况下,针对选择的信号n107,进行通信用的功率调整(例如,将与选择信号n107相乘的系数设为α),输出发送信号n109。
[0409]
并且,在控制信号n100示出“执行感测”的情况下,针对选择的信号n107进行通信用的功率调整(例如将与选择信号n107相乘的系数设为β),输出发送信号n109。
[0410]
另外,例如,α和β是0以上的实数。此时,α>β(α比β大)。这样,通过降低感测时的发送电力,据此,透过墙壁等的感测变得困难,从而能够提高确保个人隐私的可能性,并且还能够得到在通信时获得高的数据的接收质量的效果。
[0411]
并且,α和β也可以是复数。此时,|α|>|β|。此时也能够降低感测时的发送电力,据此,透过墙壁等的感测变得困难,从而能够提高确保个人隐私的可能性,并且能够得到在通信时获得高的数据的接收质量的效果。
[0412]
于是,发送信号n109作为电波,从收发天线部n110输出。
[0413]
另外,也可以不具备功率调整部n108。此时,选择的信号n107从收发天线部n110,作为电波被输出。
[0414]
收发天线部n110将接收信号n111作为输出。接收用信号选择部n112将控制信号n100、接收信号n111作为输入。在控制信号n100示出“执行通信”的情况下,接收用信号选择部n112将接收信号n111作为信号n113来输出。
[0415]
并且,在控制信号n100示出“执行感测”的情况下,接收用信号选择部n112将接收信号n111作为信号n114来输出。
[0416]
收发部n102将控制信号n100、信号n113作为输入。在控制信号n100示出“执行通信”的情况下,收发部n102针对信号n113进行解调、纠错解码等的处理,输出接收数据n115。
[0417]
感测部n104将控制信号n100,信号n114作为输入。在控制信号n100示出“执行感测”的情况,感测部n104利用信号n114等进行感测,并输出感测结果n116。
[0418]
控制部n151根据外部信号n150、接收数据n115等,生成控制信号n100并输出。
[0419]
控制部n151根据外部信号n150、接收数据n115等,生成控制信号n100并输出。
[0420]
登记部n180将外部信号n150、感测结果n116作为输入。例如,在外部信号n150示出进行用于动作登记的工作的情况下,登记部n180对包括执行动作登记的这一信息的与动作有关的信号n180进行输出。
[0421]
在与动作有关的信号n180包括执行动作登记这一信息的情况下,感测部n104生成用于感测成为对象的姿势等的感测用信号n105,并输出。
[0422]
于是,该感测用信号n105作为电波被发送,在此之后,能够感测的装置接收信号,感测部n104针对接收的信号,进行感测的估计,输出感测结果n116。
[0423]
登记部n180对感测结果n116进行登记。
[0424]
以下对具体的例子进行说明。
[0425]
例1:
[0426]
在住宅内,假设第1个人拿出“能够感测的设备”、或者“能够感测且具有通信功能的装置”,忘了放在哪里。在此,将“能够感测的设备”、或者“能够感测且具有通信功能的装
置”命名为装置#a。另外,关于装置#a的具体例子与已经进行的说明相同。
[0427]
第1个人有想要简单地找到忘了放在哪里的装置#a的需求。以下针对该需求的工作例进行说明。
[0428]
图45示出了装置#a与第1个人的关系的例子。如图45所示,首先,装置#a“决定对姿势进行登记(n201)”。因此,装置#a对感测用信号进行发送。
[0429]
对此,第1个人执行“向装置#a进行登记的动作(n202)”。另外,将该姿势命名为“第1姿势”。
[0430]
于是,装置#a进行“对第1姿势进行登记(n203)”。另外,装置#a也可以存在对是否进行了正确的姿势的登记进行确认的功能。并且,装置#a也可以具有对登记的姿势进行编辑的功能。这些功能例如可以由第1个人利用,将第1姿势正确地登记到装置#a。
[0431]
接着,使“登记的姿势(例如第1姿势)与装置#a的工作联动(n211)”。作为一个例子,与“在装置#a没有被找到时,当人进行第1姿势时,装置#a进行“发出声音”或者“振动”的工作”联动。例如,将上述(“发出声音”或者“振动”)命名为“第1工作”。另外,装置#a对与第1工作联动的内容进行登记。
[0432]
在此之后,装置#a定期的、或规则的、或不规则地执行感测。
[0433]
于是,例如,由于第1个人没有找到装置#a,因此“执行第1姿势(n212)”。另外,虽然将执行第1姿势的人视为第1个人,也可以由其他的人执行第1姿势。
[0434]
于是,通过装置#a进行感测,识别第1姿势,从而执行第1工作(n213)。
[0435]
这样,能够得到可以简单地找到装置#a的效果。此时,能够得到人可以不必持有特殊的装置的效果。
[0436]
接着,对防止姿势的误识别的方法进行说明。
[0437]
如以上所述,通过图45中的n201、n202、n203,装置#a能够对人做出的姿势进行登记。这样,装置#a对多个姿势进行登记。例如,装置#a对第1姿势、第2姿势、第3姿势、第4姿势进行登记。
[0438]
但是,如以上所示,在仅由人做出第1姿势,装置#a就“发出声音”或者“振动”,这样,在某个人无意识地做出第1姿势时,装置#a也会有进行“发出声音”或者“振动”的可能性(在此称为误工作)。
[0439]
为了防止这种误工作,而采取使多个姿势与装置#a的工作联动。
[0440]
例如在连续地执行被登记到装置#a的第1姿势和第4姿势时,在装置#a进行“发出声音”或者“振动”这种工作时,第1个人向装置#a进行登记。
[0441]
这样,在第1个人执行第1姿势和第4姿势时,装置#a对这些姿势进行识别,装置#a“发出声音”或者“振动”。
[0442]
这样,在对姿势进行多个组合时,进行了登记的第1个人以外的人偶然做出被组合的动作的概率降低,因此,能够得到明显减少装置#a的误工作的效果。
[0443]
另外,被登记到装置#a的姿势的数量并非受上述的例子所限,只要登记多个姿势就能够同样执行。并且,对于组合的姿势的数量也不受上述的例子所限,只要组合多个姿势来与装置#a的工作链接即可。
[0444]
另外,被登记到装置#a的姿势的数量并非受上述的例子所限,只要登记多个姿势就能够同样执行。并且,对于组合的姿势的数量也不受上述的例子所限,只要组合多个姿势
来与装置#a的工作链接即可。此时,作为装置#a的工作的例子,虽然对“发出声音”或者“振动”的例子进行了说明,对多个姿势与装置的工作的链接并非受这些所限,可以利用图46至图49,如以后所述那样,使多个姿势与装置(终端)的工作链接。
[0445]
并且,人执行多个姿势,并由装置#a对这些多个姿势进行识别,从而,作为装置#a执行的工作,在上述的例子中虽然对“发出声音”或者“振动”进行了说明,不过并非受此所限,装置(终端)也可以利用图46至图49如以后所述的例子所示那样进行工作。
[0446]
并且,在图45中虽然是对姿势进行登记,在此之后使姿势与装置#a的工作链接,不过,顺序并非受此所限,也可以在指定装置#a的工作之后,来登记进行链接的姿势。并且,与装置#a的工作进行链接的姿势可以是装置#a(预先)持有的姿势。在此,重要之处是,使一个或者多个姿势与终端#a的工作链接。
[0447]
例2:
[0448]
在例1中说明了使“姿势”与“装置#a的“发出声音”或者“振动”这种工作”链接的情况,在本例中对使“姿势”与“装置#a(终端#a)的通信功能的工作”链接的情况进行说明。
[0449]
图46示出了第1个人n301、“能够感测且具有通信功能”的n302的终端#a、n303的装置#b的状态的例子。在图46中,n302的终端#a与n303的装置#b能够进行通信。
[0450]
图47示出了与图46不同的例子,对于与图46相同的工作赋予相同的编号。在图47中示出了,第1个人n301、“能够感测且具备通信装置”的n302的终端#a、ap(访问接入点)n401、n303的装置#b。并且,也可以存在网络n402。在图47中,n302的终端#a与n401的ap能够进行通信,并且n303的装置#b与n401的ap能够进行通信。
[0451]
利用图48对图46的各装置的工作进行说明。
[0452]
首先,n302的终端#a“决定对姿势进行登记(n501)”。因此,n302的终端#a发送感测用信号。
[0453]
据此,第1个人n301“向n302的终端#a进行登记的动作(n502)”。另外,将该姿势命名为“第2姿势”。
[0454]
于是,n302的终端#a“对第2姿势进行登记(n503)”。另外,如以上所述,n302的终端#a也可以具有对是否正确地登记了姿势进行确认的功能。并且,n302的终端#a也可以具有对登记的姿势进行编辑的功能。这些功能例如可以由第1个人n301利用,将第2姿势正确地登记到n302的终端#a。
[0455]
接着,使“登记的姿势(例如第2姿势)与n302的终端#a的工作联动(n511)”。作为一个例子,进行如下的联动。进行“在包括第1个人n301的人做出第2姿势时,n302的终端#a针对n303的装置#b,指示执行“第2工作”。因此,n302的终端#a将指示进行第2工作的信息,发送给n303的装置#b。”这样的联动。
[0456]
在此之后,n302的终端#a执行定期的、或规则的、或不规则的感测。
[0457]
于是,第1个人n301由于想向n303的装置#b请求“第2工作”的执行,因此“执行第2姿势(n512)”。另外,虽然将执行第2姿势的人视为第1个人n301,也可以是由其他的人来执行第2姿势。
[0458]
于是,通过n0302的终端进行感测,从而识别第2姿势(n513),将指示执行“第2工作”的信息发送到n303的装置#b(n514)。
[0459]
于是,n303的装置#b执行第2工作(n515)。
[0460]
通过以上所述,能够针对装置#b简单地进行工作指示。
[0461]
此时,能够得到人无需持有特殊的装置的效果。
[0462]
利用图49对图47的各装置的工作进行说明。另外,在图49中,对于与图48同样的工作赋予相同的编号。
[0463]
首先,n302的终端#a“决定对姿势进行登记(n501)”。因此,n302的终端#a对感测用信号进行发送。
[0464]
对此,第1个人n301“向n302的终端#a进行登记的动作(n502)”。另外,将该姿势命名为“第2姿势”。
[0465]
于是,n302的终端#a“对第2姿势进行登记(n503)”。另外,如以上所述,n302的终端#a也可以具有对是否正确地登记了姿势进行确认的功能。并且,n302的终端#a也可以具有对登记的姿势进行编辑的功能。可以将这些功能例如由第1个人n301来利用,也可以将第2姿势正确地登记到n302的终端a。
[0466]
接着,使“登记的姿势(例如第2姿势)与n302的终端#a的工作联动(n611)”。作为例子,进行以下的联动。在包括第1个人n301的人做出第2姿势时,n302的终端#a针对n303的装置#b,指示执行“第3工作”。因此,n302的终端#a将指示执行第3工作的信息发送到n401的ap。于是,n401的ap将包括该信息(指示执行第3工作)的调制信号发送到n303的装置#b。
[0467]
在此之后,n302的终端#a定期的、或规则的、或不规则的进行感测。
[0468]
于是,第1个人n301由于想向n303的装置#b请求“第3工作”,因此“执行第2姿势(n612)”。另外,在此虽然将执行第2姿势的人设为第1个人n301,也可以由其他的人来执行第2姿势。
[0469]
于是,通过n302的终端#a进行感测,识别第2姿势(n613),从而将指示执行“第3工作”的信息发送到n401的ap(n614)。
[0470]
于是,n401的ap将包括该信息(第3工作执行的指示)的调制信号发送到n303的装置#b(n615)。
[0471]
据此,n303的装置#b执行第3工作(n616)。
[0472]
另外,在图47中也可以是n401的ap与网络n402进行通信。例如,n401的ap可以经由网络n402,与云服务器进行通信。于是,n401的ap从云服务器接受指示。
[0473]
例如,云服务器可以从n302的终端#a、n303的装置#b、n401的ap等,获得与感测有关的信息。
[0474]
在这种情况下,云服务器自身也可以进行姿势的登记内容的掌握、姿势的识别的运算。不过,n302的终端#a需要将成为这些的基础的信息加载到云服务器。并且,云服务器掌握与姿势联动的内容,据此,可以针对n302的终端#a、n303的装置#b、n401的ap进行指示。
[0475]
这样,能够得到针对装置#b简单地进行工作指示的效果。此时,能够得到的效果是,人可以不必持有特殊的装置就能够对设备进行指示。
[0476]
另外,在本说明中,虽然使用姿势这一用语进行了说明,也可以取代姿势而使用人的动作、人体的一部分的形状、人体的一部分的动作、人的检测、人的一部分的检测、人的认证、人的一部分的认证、物体的动作、物体的形状、物体的检测、物体的认证等,来执行本说明。
[0477]
并且,感测的方法可以使用本说明书中记载的例子,也可以使用除此以外的方法。
[0478]
(实施方式8)
[0479]
在本实施方式中,对能够进行感测的装置存在的空间中的感测的具体例子进行说明。
[0480]
图50示出了本实施方式中的各装置的状态的例子。n700作为一个例子示出了住宅内这一空间。如图50所示,例如在住宅内n700存在ap(访问接入点)n701、音响n702、“智能手机、或者智能音箱、或者平板电脑、或者计算机、或者便携式电话”等终端即设备n703、以及照明器具n704。另外,以后将设备n703称为设备#c。
[0481]
并且,人n705在住宅内n700生活。
[0482]
n701的ap如在其他的实施方式的说明所示,既能够感测又能够通信。
[0483]
于是,n701的ap例如与音响n702、n703的设备#c、照明n704等进行通信。另外,n701的ap也可以与除此以外的装置进行通信。
[0484]
并且,n701的ap经由网络n710,与(云)服务器n720进行通信。
[0485]
而且,n701的ap经由网络n710,与基站n730进行通信。
[0486]
基站n730与“智能手机、或者平板电脑、或者计算机、或者便携式电话”等终端即设备n731进行通信。另外,以后将设备n731称为设备#d。
[0487]
接着,对图50中的n701的ap的详细的工作例进行说明。
[0488]
图51示出了在住宅内设置了n701的ap时的工作例的流程图。
[0489]
首先,n701的ap进行感测(n801),将住宅内的状况的信息、例如房间数量的信息、房间的形状的信息、设置的物品的信息、例如家具的位置的信息、家具的形状的信息、家电(当然包括音响n702、照明n704)的位置的信息、家电的形状的信息、电子设备(当然包括n703的设备#c)的位置的信息、电子设备的形状的信息等加载到云服务器(n802)。
[0490]
据此,n701的ap结束初期感测(n803)。另外,在此虽然记载为初期感测,也可以在n701的ap设置后,由n701的ap定期的、或不定期的、或规则的、或不规则的进行图51的工作。
[0491]
作为其他的例子,图51示出了n703的设备#c的工作。
[0492]
首先,n703的设备#c进行感测(n801),将住宅内的状况的信息、例如房间数量的信息、房间的形状的信息、被设置的物品的信息、例如家具的位置的信息、家具的形状的信息、家电(当然包括音响n702、照明n704)的位置的信息、家电的形状的信息、电子设备的位置的信息、电子设备的形状的信息等,经由n701的ap加载到云服务器(n802)。
[0493]
据此,n703的设备#c结束初期感测(n803)。另外,虽然记载为初期感测,n703的设备#c也可以定期的、或不定期的、或规则的、或不规则的进行图51的工作。
[0494]
图52示出了n701的ap的一个工作例的流程图。
[0495]
n701的ap将通过感测而得到的住宅内的设备例如家电(当然包括音响n702、照明n704)的信息、电子设备(当然包括n703的设备#c)的信息加载到云服务器(n901)。
[0496]
于是,与住宅内的设备的工作和n701的ap进行的感测的联动的信息被加载到云服务器(n902)。另外,关于住宅内的设备的工作与能够感测的设备(在此为n701的ap)的感测的联动、联动的登记,在实施方式7中进行了举例说明。以下对与实施方式7不同的工作,尤其是联动的工作例进行说明。
[0497]
作为其他的例子,图52示出了n703的设备#c的工作。
[0498]
n703的设备#c将通过感测而得到的住宅内的设备例如家电(当然包括音响n702、
照明n704)的信息、电子设备的信息,经由n701的ap,加载到云服务器(n901)。
[0499]
于是,与住宅内的设备的工作和n703的设备#c所进行的感测的联动相关的信息被加载到云服务器(n902)。另外,关于住宅内的设备的工作和能够感测的设备(在此为n703的设备#c)的感测的联动、联动的登记,在实施方式7中进行了举例说明。以下对与实施方式7不同的工作,尤其是联动的工作例进行说明。
[0500]
图53示出了与系统有关的工作例的流程图。以下利用图53,对音响n702与感测的联动、设备#c与感测的联动、照明n704与感测的联动的例子进行说明。
[0501]
n701的ap执行感测(n1001)。
[0502]
作为感测的结果,n701的ap确认是否检测到住宅内包括人在内的可动物体(n1002)。
[0503]
n701的ap在没有检测到住宅内包括人在内的可动物体(n1002的“否”)的情况下,进入到“执行感测n1001”。
[0504]
n701的ap在检测到住宅内的包括人在内的可动物体(n1002的“是”)的情况下,n701的ap经由网络n710,将与住宅内的状况有关的信息加载到云服务器n720(n1003)。
[0505]
同时,云服务器n720向n701的ap,发送与音响n702的控制有关的信息、或者与n703的设备#c的控制有关的信息、或者与照明n704的控制有关的信息。于是,n701的ap701得到与控制有关的信息(控制信息)(n1004的“是”)。
[0506]
于是,n701的ap向成为对象的设备(在图50的情况下为音响n702、或者n703的设备#c、或者照明n704)发送控制信息(n1005)。
[0507]
同时,成为对象的设备进行基于该控制信息的控制,并结束控制(n1006)。
[0508]
于是,n701的ap进行下一个感测(n1001)。
[0509]
另外,n701的ap在检测到住宅内包括人在内的可动物体(n1002的“是”)的情况下,n701的ap经由网络n710,将与住宅内的状况有关的信息加载到云服务器n720(n1003),从而,n701的ap从云服务器n720得到控制信息(n1004的“否”)。在这种情况下,n701的ap进行下一个感测(n1001)。
[0510]
例如,在n1005可以考虑到,n701的ap针对音响n702发送控制信息的情况。在这种情况下,根据由n701的ap通过感测得到的人的位置的信息,云服务器n720将与音响n702的声音/音响的指向性控制有关的信息发送到n701的ap。于是,n701的ap将与声音/音响的指向性控制有关的信息发送到音响n702,音响n702根据与声音/音响的指向性控制有关的信息,对声音/音响的指向性进行控制。
[0511]
作为其他的例子,在n1005可以考虑到,n701的ap针对照明n704发送控制信息的情况。在这种情况下,根据由n701的ap进行感测而得到的人/可动物体的位置的信息,云服务器n720将照明n704的与照明的“on/off、或者光的照射指向性控制”有关的信息发送到n701的ap。于是,n701的ap将与“on/off、或者光的照射指向性控制”有关的信息发送到照明n704,照明n704根据与“on/off、或者光的照射指向性控制”有关的信息,进行照明的on/off、或者照明的照射方向的控制。
[0512]
如以上所述,根据住宅内的状态,来对住宅内存在的设备进行控制,据此,能够得到能够提供舒适、安全的生活的效果。
[0513]
对图53的其他的例子进行说明。
[0514]
n703的设备#c执行感测(n1001)。
[0515]
根据感测的结果,n703的设备#c对是否检测到住宅内包括人在内的可动物体进行确认(n1002)。
[0516]
n703的设备#c在没有检测到住宅内包括人在内的可动物体(n1002的“否”)的情况下,进入到“执行感测n1001”。
[0517]
n703的设备#c在检测到住宅内包括人在内的可动物体(n1002的“是”)情况下,n703的设备#c经由n701的ap、网络n710,将与住宅内的状况有关的信息加载到云服务器n720(n1003)。
[0518]
同时,云服务器n720经由网络n710、n701的ap,向n703的设备#c发送与音响n702的控制有关的信息、或者与照明n704的控制有关的信息。于是,n703的设备#c得到与控制有关的信息(控制信息)(n1004的“是”)。
[0519]
于是,n703的设备#c向成为对象的设备(在图50的情况下为音响n702、或者照明n704)发送控制信息(n1005)。不过,经由n701的ap。
[0520]
同时,成为对象的设备根据该控制信息进行控制,并结束控制(n1006)。
[0521]
于是,n703的设备#c进行下一个感测(n1001)。
[0522]
另外,n703的设备#c在检测到住宅内包括人在内的可动物体(n1002的“是”)的情况下,n703的设备#c经由n701的ap、网络n710,将与住宅内的状况有关的信息加载到云服务器n720(n1003),n703的设备#c从云服务器n720获得控制信息(n1004的“否”)。在这种情况下,n703的设备#c进行下一个感测(n1001)。
[0523]
例如,在n1005可以考虑到,n703的设备#c针对音响n702发送控制信息的情况。在这种情况下,根据由n703的设备#c进行感测而得到的人的位置的信息,云服务器n720将与音响n702的声音/音响的指向性控制有关的信息,经由n701的ap发送到n703的设备#c。于是,n703的设备#c将与声音/音响的指向性控制有关的信息,经由n701的ap发送到音响n702,音响n702根据与声音/音响的指向性控制有关的信息,进行声音/音响的指向性控制。
[0524]
作为其他的例子,在n1005中可以考虑到,n703的设备#c针对照明n704发送控制信息的情况。在这种情况下,根据由n703的设备#c进行感测而得到的人/可动物体的位置的信息,云服务器n720将照明n704的与照明的“on/off、或者光的照射指向性控制”有关的信息,经由n701的ap发送到n703的设备#c。于是,n703的设备#c将与“on/off、或者光的照射指向性控制”有关的信息,经由n701的ap,发送给照明n704,照明n704根据与“on/off、或者光的照射指向性控制”有关的信息,进行照明的on/off、或者照明的照射方向的控制。
[0525]
通过以上所述,通过根据住宅内的状态,来对住宅内存在的设备进行控制,从而能够得到能够提供舒适、安全的生活的效果。
[0526]
图54示出了住宅内的n701的ap、n720的云服务器的工作例的流程图。
[0527]
n701的ap进行感测(n1101),将住宅内的状况的信息例如房间数量的信息、房间的形状的信息、被设置的物品的信息例如家具的位置的信息、家具的形状的信息、家电(当然包括音响n702、照明n704)的位置的信息、家电的形状的信息、电子设备(当然包括n703的设备#c)的位置的信息、电子设备的形状的信息等加载到云服务器(n1102)。
[0528]
n720的云服务器对保存的与住宅内的状况有关的信息、和新得到的与住宅内的状况有关的信息进行比较。于是,n720的云服务器对“检测到新的状态了吗”进行确认
(n1103)。
[0529]
在n720的云服务器确认到新的状态(n1103的“是”)时,对与住宅内的状况有关的信息进行更新(n1104)。于是,成为下一个的n701的ap的执行感测(n1101)。
[0530]
在n720的云服务器没有确认到新的状态(n1103的“否”)时,成为下一个的n701的ap的执行感测(n1101)。
[0531]
作为其他的例子,图54示出了n703的设备#c、n720的云服务器的工作。
[0532]
n703的设备#c进行感测(n1101),将住宅内的状况的信息例如房间数量的信息、房间的形状的信息、被设置的物品的信息例如家具的位置的信息、家具的形状的信息、家电(当然包括音响n702、照明n704)的位置的信息、家电的形状的信息、电子设备的位置的信息、电子设备的形状的信息等,经由n701的ap加载到云服务器(n1102)。
[0533]
n720的云服务器对保存的与住宅内的状况有关的信息、和新得到的与住宅内的状况有关的信息进行比较。于是,n720的云服务器对“检测到新的状态了吗”进行确认(n1103)。
[0534]
在n720的云服务器确认到新的状态(n1103的“是”)时,对与住宅内的状况有关的信息进行更新(n1104)。于是,成为下一个的n703的设备#c的执行感测(n1101)。
[0535]
在n720的云服务器没有确认到新的状态(n1103的“否”)时,成为下一个的n703的设备#c的执行感测(n1101)。
[0536]
如以上所述,通过根据住宅内的状态,对住宅内存在的设备进行控制,从而能够得到能够提供舒适、安全的生活的效果,并且通过适宜地对由感测得到的信息进行更新,从而能够得到可以进行更恰当的控制的效果。
[0537]
另外,在图53中,与云服务器相关的工作由虚线表示。同样,在图54中,与云服务器相关的工作由虚线表示。
[0538]
(实施方式9)
[0539]
在本实施方式中,对能够进行感测的装置存在的空间中的感测的具体例子进行说明。
[0540]
图55示出了本实施方式中的各装置的状态的例子。另外,对于与图50同样的工作赋予相同的编号。
[0541]
n700作为例子示出了住宅内这一空间。如图55所示,例如在住宅内n700中存在,ap(访问接入点)n701、音响n702、“智能手机、或者智能音箱、或者平板电脑、或者计算机、或者便携式电话”等终端即设备n703、照明器具n704。另外,以后将设备n703称为设备#c。于是,例如在住宅内n700存在服务器q101。
[0542]
并且,人n705在住宅内n700中生活。
[0543]
n701的ap如其他的实施方式中的说明所示,既能够进行感测又能够进行通信。
[0544]
于是,n701的ap例如与音响n702、n703的设备#c、照明n704等进行通信。另外,n701的ap可以与除此以外的装置进行通信。
[0545]
并且,n701的ap经由网络q102,与服务器q101进行通信。
[0546]
并且,n701的ap经由网络n701,与基站n730进行通信。
[0547]
基站n730与“智能手机、或者平板电脑、或者计算机、或者便携式电话”等终端即设备n731进行通信。另外,以后将设备n731称为设备#d。
[0548]
接着,对图55中的n701的ap的详细的工作例进行说明。
[0549]
图56示出了在住宅内设置了n701的ap时的工作例的流程图。
[0550]
首先,n701的ap进行感测(q201),将住宅内的状况的信息例如房间数量的信息、房间的形状的信息、被设置的物品的信息例如家具的位置的信息、家具的形状的信息、家电(当然包括音响n702、照明n704)的位置的信息、家电的形状的信息、电子设备(当然包括n703的设备#c)的位置的信息、电子设备的形状的信息等,加载到服务器q101(q202)。
[0551]
据此,n701的ap结束初期感测(q203)。另外,虽然记载为初期感测,也可以在n701的ap设置后,由n701的ap定期的、或不定期的、或规则的、或不规则的进行图56的工作。
[0552]
作为其他的例子,图56示出了n703的设备#c的工作。
[0553]
首先,n703的设备#c进行感测(q201),将住宅内的状况的信息例如房间数量的信息、房间的形状的信息、被设置的物品的信息例如家具的位置的信息、家具的形状的信息、家电(当然,包括音响n702、照明n704)的位置的信息、家电的形状的信息、电子设备的位置的信息、电子设备的形状的信息等,经由n701的ap加载到服务器q101(q202)。
[0554]
据此,n703的设备#c结束初期感测(q203)。另外,虽然记载为初期感测,n703的设备#c也可以定期的、或不定期的、或规则的、或不规则的进行图56的工作。
[0555]
图57示出了n701的ap的一个工作例的流程图。
[0556]
n701的ap将由感测得到的住宅内的设备的信息例如家电(当然包括音响n702、照明n704)的信息、电子设备(当然包括n703的设备#c)的信息加载到服务器q101(q301)。
[0557]
于是,将与住宅内的设备的工作和n701的ap进行的感测的联动有关的信息加载到服务器q101(q302)。另外,关于住宅内的设备的工作与能够感测的设备(在此为n701的ap)的感测的联动、联动的登记,在实施方式7进行了举例说明。以下对与实施方式7不同的工作,尤其是联动的工作例进行说明。
[0558]
作为其他的例子,图57示出了n703的设备#c的工作。
[0559]
n703的设备#c将由感测得到的住宅内的设备例如家电(当然包括音响n702、照明n704)的信息、电子设备的信息,经由n701的ap,加载到服务器q101(q301)。
[0560]
于是,将与住宅内的设备的工作和n703的设备#c进行的感测的联动有关的信息加载到云服务器(q302)。另外,关于住宅内的设备的工作和能够感测的设备(在此为n703的设备#c)的感测的联动、联动的登记,在实施方式7中举例进行了说明。以下对与实施方式7不同的工作,尤其是联动的工作例进行说明。
[0561]
图58例如示出了与图55的系统有关的工作例的流程图。以下利用图58,对音响n702与感测的联动、设备#c与感测的联动、照明n704与感测的联动的例子进行说明。另外,在图58中,对于与服务器相关的工作用虚线示出。
[0562]
n701的ap执行感测(q401)。
[0563]
根据感测的结果,n701的ap对是否检测到住宅内包括人在内的可动物体进行确认(q402)。
[0564]
n701的ap在没有检测到住宅内包括人在内的可动物体(q402的“否”)的情况下,进入到“执行感测q401”。
[0565]
n701的ap在检测到住宅内包括人在内的可动物体(q402的“是”)的情况下,n701的ap经由网络q102,将与住宅内的状况有关的信息加载到服务器q101(q403)。
[0566]
同时,服务器q101向n701的ap,发送与音响n702的控制有关的信息、或者与n703的设备#c的控制有关的信息、或者与照明n704的控制有关的信息。于是,n701的ap701得到与控制有关的信息(控制信息)(q404的“是”)。
[0567]
于是,n701的ap向成为对象的设备(在图55的情况下,音响n702、或者n703的设备#c、或者照明n704)发送控制信息(q405)。
[0568]
同时,成为对象的设备进行基于该控制信息的控制,并结束控制(q406)。
[0569]
于是,n701的ap进行下一个的感测(q401)。
[0570]
另外,n701的ap在检测到住宅内包括人在内的可动物体(q402的“是”)的情况下,n701的ap经由网络q102,将与住宅内的状况有关的信息加载到服务器q101(q403),n701的ap不从服务器q101得到控制信息(q404的“否”)。在这种情况下,n701的ap进行下一个的感测(q401)。
[0571]
例如,在q405可以考虑到,n701的ap针对音响n702发送控制信息的情况。在这种情况下,根据由n701的ap进行感测而得到的人的位置的信息,服务器q101将与音响n702的声音/音响的指向性控制有关的信息发送到n701的ap。于是,n701的ap将与声声音/音响的指向性控制有关的信息发送到音响n702,音响n702根据与声音/音响的指向性控制有关的信息,进行声音/音响的指向性控制。
[0572]
作为其他的例子,在q405可以考虑到,n701的ap针对照明n704发送控制信息的情况。在这种情况下,根据由n701的ap进行感测而得到的人/可动物体的位置的信息,服务器q101将与照明n704的照明的“on/off、或者光的照射指向性控制”有关的信息发送到n701的ap。于是,n701的ap将与“on/off、或者光的照射指向性控制”有关的信息发送到照明n704,照明n704根据与“on/off、或者光的照射指向性控制”有关的信息,进行照明的on/off、或者照明的照射方向的控制。
[0573]
如以上所述,通过根据住宅内的状态,来控制住宅内存在的设备,从而能够得到能够提供舒适、安全的生活的效果。
[0574]
对图58的其他的例子进行说明。
[0575]
n703的设备#c执行感测(q401)。
[0576]
根据感测的结果、n703的设备#c确认是否检测到住宅内包括人在内的可动物体(q402)。
[0577]
n703的设备#c在没有检测到住宅内包括人在内的可动物体(q402的“否”)的情况下,进入到执行感测q401。
[0578]
n703的设备#c在检测到住宅内包括人在内的可动物体(q402的“是”)的情况下,n703的设备#c经由n701的ap、网络q102,将与住宅内的状况有关的信息加载到服务器q101(q403)。
[0579]
同时,服务器q101经由网络q102、n701的ap,将与音响n702的控制有关的信息、或者与照明n704的控制有关的信息,发送到n703的设备#c。于是,n703的设备#c得到与控制有关的信息(控制信息)(q404的“是”)。
[0580]
于是,n703的设备#c向成为对象的设备(在图55的情况下为音响n702、或者照明n704)发送控制信息(q405)。不过,在此经由n701的ap。
[0581]
同时,成为对象的设备根据该控制信息进行控制,并结束控制(q406)。
[0582]
于是,n703的设备#c进行下一个的感测(q401)。
[0583]
另外,n703的设备#c在检测到住宅内包括人在内的可动物体(q402的“是”)的情况下,n703的设备#c经由n701的ap、网络q102,将与住宅内的状况有关的信息加载到服务器q101(q403),n703的设备#c不从服务器q101获得控制信息(q404的“否”)。在这种情况下,n703的设备#c进行下一个的感测(q401)。
[0584]
例如,在q405可以考虑到,n703的设备#c针对音响n702发送控制信息的情况。在这种情况下,根据n703的设备#c进行感测而得到的人的位置的信息,服务器q101将与音响n702的声音/音响的指向性控制有关的信息,经由n701的ap,发送到n703的设备#c。于是,n703的设备#c将与声音/音响的指向性控制有关的信息,经由n701的ap,发送到音响n702,音响n702根据与声音/音响的指向性控制的信息,进行声音/音响的指向性控制。
[0585]
作为其他的例子,在q405可以考虑到,n703的设备#c针对照明n704发送控制信息的情况。在这种情况下,根据n703的设备#c进行感测而得到的人/可动物体的位置的信息,服务器q101将与照明n704的照明的“on/off、或者光的照射指向性控制”有关的信息,经由n701的ap,发送到n703的设备#c。于是,n703的设备#c将与“on/off、或者光的照射指向性控制”有关的信息,经由n701的ap,发送到照明n704,照明n704根据与“on/off、或者光的照射指向性控制”有关的信息,对照明的on/off、或者照明的照射方向进行控制。
[0586]
如以上所述,通过根据住宅内的状态,来控制住宅内存在的设备,从而能够得到可以提供舒适、安全的生活的效果。
[0587]
图59示出了住宅内的n701的ap、服务器q101的工作例的流程图。另外,在图59中,对于与服务器关联的工作,用虚线表示。
[0588]
n701的ap进行感测(q501),将住宅内的状况的信息例如房间数量的信息、房间的形状的信息、被设置的物品的信息例如家具的位置的信息、家具的形状的信息、家电(当然,包括音响n702、照明n704)的位置的信息、家电的形状的信息、电子设备(当然,包括n703的设备#c)的位置的信息、电子设备的形状的信息等,加载到服务器q101(q502)。
[0589]
服务器q101对保存的与住宅内的状况有关的信息、与新得到的与住宅内的状况有关的信息进行比较。于是,服务器q101对“检测到新的状态了吗”进行确认(q503)。
[0590]
服务器q101在确认到新的状态(q503的“是”)时,对与住宅内的状况有关的信息进行更新(q504)。于是,成为下一个的n701的ap的执行感测(q501)。
[0591]
服务器q101在没有确认到新的状态时(q503的“否”),成为下一个的n701的ap的执行感测(q501)。
[0592]
作为其他的例子,图59示出了n703的设备#c、服务器q101的工作。
[0593]
n703的设备#c进行感测(q501),将住宅内的状况的信息例如房间数量的信息、房间的形状的信息、被设置的物品的信息例如家具的位置的信息、家具的形状的信息、家电(当然,包括音响n702、照明n704)的位置的信息、家电的形状的信息、电子设备的位置的信息、电子设备的形状的信息等,经由n701的ap,加载服务器q101(q502)。
[0594]
服务器q101对保存的与住宅内的状况有关的信息、与新得到的与住宅内的状况有关的信息进行比较。于是,服务器q101对“检测到新的状态了吗”进行确认(q503)。
[0595]
服务器q101在确认到新的状态时(q503的“是”),对与住宅内的状况有关的信息进行更新(q504)。于是,成为下一个的n703的设备#c的执行感测(q501)。
[0596]
服务器q101在没有确认到新的状态时(q503的“否”),成为下一个的n703的设备#c的执行感测(q501)。
[0597]
如以上所述,通过根据住宅内的状态,来控制住宅内存在的设备,从而能够得到可以提供舒适、安全的生活的效果,并通过适宜地对感测到的信息进行更新,从而能够得到更优选的控制的效果。
[0598]
另外,在图55中,n701的ap、q102的网络、服务器q101可以由一个装置来构成。此时,网络q102既可以是有线通信也可以是无线通信,因此,n701的ap与服务器q101在装置内可以是有线连接,也可以是无线连接。
[0599]
(实施方式10)
[0600]
在本实施方式中,对至少具有感测的功能的装置的具体的利用方法的例子进行说明。
[0601]
例1:
[0602]
根据通过感测而得到的物体,来生成特性,并显示到画面上。
[0603]
通过在应用中利用特性,从而能够实现应用的多样性,并且能够得到相应的效果。
[0604]
图60示出了本实施方式中的系统的构成的一个例子。
[0605]
在图60中,第2装置搭载了监视器。
[0606]
第1装置至少具有感测的功能。于是,第1装置进行感测,例如通过抓住第1个人物的特征,来生成信息,并将该信息传输到第2装置。
[0607]
于是,第2装置从第1个人物的特征的信息,生成将在第2装置的监视器显示的第1特性。于是,第2装置的监视器能够对第1特性进行显示。另外,也可以针对第1特性来进行某种变形的符合需求的设计。
[0608]
作为其他的方法,第1装置进行感测,例如抓住第2物体的特征,来生成第2特性的信息,并将该信息传输到第2装置。
[0609]
于是,第2装置根据第2特性的信息,将第2特性显示到第2装置的监视器。另外,也可以针对第2特性来进行某种变形的符合需求的设计。
[0610]
另外,可以由第1装置和第2装置来形成一个装置。
[0611]
图61示出了与图60不同的本实施方式中的系统的构成的一个例子。
[0612]
在图61中,第2装置能够与外部监视器连接。
[0613]
第1装置至少具有感测的功能。于是,第1装置进行感测,例如通过抓住第1个人物的特征,来生成信息,并将该信息传输到第2装置。
[0614]
于是,第2装置从第1个人物的特征的信息,生成将要在与第2装置连接的监视器显示的第1特性。于是,在监视器能够显示第1特性。另外,也可以针对第1特性进行某种变形的符合需求的设计。
[0615]
作为其他的方法,第1装置进行感测,例如通过抓住第2物体的特性,来生成第2特性的信息,并将该信息传输到第2装置。
[0616]
于是,第2装置根据第2特性的信息,在监视器显示第2特性。另外,也可以针对第2特性进行某种变形的符合需求的设计。
[0617]
例2:
[0618]
通过利用由相机等能够拍摄图像的传感器得到的物体的图像(静止图像、或者运
动图像),例如通过利用无线的感测而得到的物体的估计信息,能够再现物体的三维空间。
[0619]
图62示出了本实施方式中的系统的构成的一个例子。
[0620]
在图62中,第3装置搭载了监视器。
[0621]
第3装置具备相机等能够拍摄图像的传感器、以及通过无线的感测部。
[0622]
通过利用无线的感测部,来获得物体的三维的空间估计信息。
[0623]
通过由相机等能够拍摄图像的传感器来拍摄图像,来获得物体的二维(或者三维)的图像信息以及颜色信息。
[0624]
三维空间估计部根据“物体的三维的空间估计信息”、“物体的二维(或者、三维)的图像信息以及颜色信息”,来生成物体的(带有颜色的)三维空间的估计信息,并显示到监视器。
[0625]
另外,物体的(带有颜色的)三维空间的估计信息所具有的优点是,由于得到的是三维的信息,因此在监视器进行显示时,用于显示物体的视点能够自由地变更。
[0626]
图63示出了与图62不同的本实施方式中的系统的构成的一个例子。
[0627]
在图63中,第3装置能够与外部监视器连接。
[0628]
各部的基本的工作与图62的说明相同。
[0629]
另外,关于各实施方式中的感测的方法,进行补充说明。
[0630]
图64以及图65示出各实施方式中的感测的方法。
[0631]
图64是在三维上示出空间的模式图。如图64所示,在空间内存在物体和检测装置。检测装置例如通过电波等无线的方式来感测物体。另外,物体的形状可以是任意的。
[0632]
图65示出了贯通物体的平面的一个例子,该平面是与图64的xy平面平行的平面,例如,示出了检测装置发送的电波的路径。在此,检测装置从物体获得的电波,可以是到达物体的电波由物体反射的反射波,也可以是物体自身反射的电波。
[0633]
如图65所示,检测装置接收由物体自身反射,且直接到达检测装置的电波(称为直接波)w1。并且,检测装置发送电波,在墙壁反射后到达物体的电波由物体反射,进一步由墙壁反射,到达检测装置的电波(也称为反射波)w2、w3以及w4,由检测装置接收。
[0634]
图65示出了截取三维空间的xy平面这一二维平面的例子,在截取三维空间的二维平面中,与上述的说明相同,检测装置能够利用直接波以及反射波,来检测物体的位置以及形状。换而言之,能够得到的效果是,检测装置能够检测相机等能够拍摄图像的传感器不能拍摄到的物体的一个部分。
[0635]
(补充1)
[0636]
当然,在本公开中所说明的实施方式、补充等其他的内容可以通过多个组合来实施。
[0637]
在本公开中,虽然举例说明了将检测装置a12作为相机来执行的情况,不过,本公开中的检测装置a12也可以通过除此以外的形态来实现。检测装置a12例如可以是智能手机或个人电脑,也可以是车辆、机器人、无人机等。
[0638]
(补充2)
[0639]
当然、在本公开中所说明的实施方式、补充等其他的内容也可以通过进行多个组合来实施。
[0640]
于是,终端与访问接入点(ap)进行通信,在发送调制信号时,可以发送一个调制信
号,也可以将多个调制信号通过多个天线来发送。因此,可以采用mimo(multiple-input multiple-output)的传输方式。因此,终端、ap可以是具有多个接收的天线的构成。
[0641]
并且,在并说明书中,为了说明的简化,在实施方式中命名为终端、ap、基站、装置、检测装置、设备来进行了说明,关于名称并非受此所限。例如,“终端”也可以被称为基站、访问接入点、便携式电话(mobile phone)、智能手机、平板电脑等的通信/广播设备、电视机、无线电、个人电脑等的通信设备、通信装置、中继器、服务器。并且,“ap”也可以被称为基站、终端、便携式电话、智能手机、平板电脑等的通信/广播设备、电视机、无线电、个人电脑等的通信设备、通信装置、中继器、服务器。并且,“基站”也可以被称为ap、终端、便携式电话、智能手机、平板电脑等的通信/广播设备、电视机、无线电、个人电脑等的通信设备、通信装置、中继器、服务器。而且,进行感测的设备也可以被称为ap、终端、便携式电话、智能手机、平板电脑等的通信/广播设备、电视机、无线电、个人电脑等的通信设备、通信装置、中继器、服务器。“装置”、“检测装置”也可以被称为ap、终端、便携式电话、智能手机、平板电脑等的通信/广播设备、电视机、无线电、个人电脑等的通信设备、通信装置、中继器、服务器。“设备”、“设备a”也可以被称为ap、终端、便携式电话、智能手机、平板电脑等的通信/广播设备、电视机、无线电、个人电脑等的通信设备、通信装置、中继器、服务器、电动摩托车(e-摩托车)、电动滑板车、吸尘器、电动车、电动辅助自行车、电动辅助滑板车、摩托车、自动车辆、传播、飞机。
[0642]
关于各实施方式仅为一个例子,例如举例示出了“调制方式、纠错编码方式(使用的纠错码、码长、编码率等)、控制信息等”,不过在适用了其他的“调制方式、纠错编码方式(使用的纠错码、码长、编码率等)、控制信息等”的情况下,也能够同样执行。
[0643]
关于调制方式,即使可以使用本说明书记载的调制方式以外的调制方式,也能够执行本说明书中的实施方式、其他的内容。例如,可以适用apsk(amplitude phase shift keying:幅度相移键控,例如16apsk、64apsk、128apsk、256apsk、1024apsk、4096apsk等),pam(pulse amplitude modulation:脉冲幅度调制,例如4pam、8pam、16pam、64pam、128pam、256pam、1024pam、4096pam等),psk(phase shift keying:相移键控,例如bpsk、qpsk、8psk、16psk、64psk、128psk、256psk、1024psk、4096psk等),qam(quadrature amplitude modulation:正交振幅控制,例如4qam、8qam、16qam、64qam、128qam、256qam、1024qam、4096qam等),在各调制方式可以是均一映射、也可以是非均一映射。并且,i-q平面中的2个、4个、8个、16个、64个、128个、256个、1024个等信号点的配置方法(具有2个、4个、8个、16个、64个、128个、256个、1024个等的信号点的调制方式),并非受本说明书所示的调制方式的信号点配置方法所限。
[0644]
并且,本公开中的发送装置、接收装置是具有通信功能的设备,该设备的构成为,能够经由某种接口与电视机、收音机、个人计算机、便携式电话等用来执行应用的装置连接。并且,在本实施方式中,数据码元以外的码元,例如导频码元(前导码、独特字、后同步信号、基准码元、midamble码等)、控制信息用的码元、空字符等在帧中可以是任意的配置。并且,在此虽然命名为基准码元、控制信息用的码元,命名的方式可以是任意的,功能本身是重要的。
[0645]
基准码元以及基准信号例如在收发机中,只要是使用psk调制进行了调制的已知的码元就可以,接收机利用该码元,进行频率同步、时间同步、各调制信号的信道估计(csi(channel state information)的估计)、信号的检测等。或者,基准码元以及基准信号也可
以通过与接收机同步,从而接收机能够知道由发送机发送的码元。
[0646]
并且,控制信息用的码元是用来传输用于实现数据(应用等的数据)以外的通信的、需要传输给通信对方的信息(例如,在通信中使用的调制方式、纠错编码方式、纠错编码方式的编码率、上位层中的设定信息等)的码元。
[0647]
另外,本公开并非受各实施方式所限,能够进行各种变更来实施。例如在各实施方式中,虽然对作为通信装置的情况进行了说明,但是并非受此所限,也可以将该通信方法作为软件来执行。
[0648]
另外,例如可以将执行上述通信方法的程序预先存放到rom中,通过cpu来使该程序工作。
[0649]
并且,可以将执行上述通信方法的程序存放到计算机可读取的存储介质,将存放在存储介质的程序记录到计算机的ram,使计算机按照该程序工作。
[0650]
并且,上述的各实施方式等各构成典型的可以作为具有输入端子以及输出端子的集成电路即lsi来实现。它们既可以单独地制成一个芯片,也可以将各实施方式的所有的结构或者一部分的结构包括在一个芯片中。在此,虽然设为lsi,但是根据集成度的不同,也有称作ic、系统lsi、超级lsi、极大规模lsi的情况。并且,集成电路化的方法并非受lsi所限,也可以由专用电路或通用处理器来实现。也可以利用在lsi制造后能够编程的fpga(field programmable gate array:现场可编程门阵列)、或能够再构成lsi内部的电路单元的连接及设定的可重构处理器。进而,如果因半导体技术的进步或派生的其他技术而出现代替lsi的集成电路化的技术,则当然也可以使用该技术进行功能块的集成化。也有生物技术的应用等可能性。
[0651]
另外,ap、终端终端所对应的发送方法可以是ofdm等多载波方式,也可以是单载波方式。并且,ap、终端也可以对应多载波方式、单载波方式这双方。此时,生成单载波方式的调制信号的方法为多个,不论哪个方式的情况都能够实施。例如,作为单载波方式的例子有“dft(discrete fourier transform)-spread ofdm(orthogonal frequency division multiplexing)”、“trajectory constrained dft-spread ofdm”、“ofdm based sc(single carrier)”、“sc(single carrier)-fdma(frequency division multiple access)”、“guard interval dft-spread ofdm”等。
[0652]
并且,fpga(field programmable gate array:现场可编程门阵列)以及cpu(central processing unit)的至少一方可以被构成为,能够通过无线通信或者有线通信来下载用于实现本公开中所说明的通信方法所需要的软件的全部或一部分。而且,可以构成为将用于更新的软件的全部或一部分通过无线通信或者有线通信来下载。而且,可以将下载的软件保存到存储部,根据被保存的软件使fpga以及cpu的至少一方工作,来执行本公开中说明的数字信号处理。
[0653]
此时,具备fpga以及cpu的至少一方的设备可以通过无线或有线与通信调制解调器连接,可以通过该设备和通信调制解调器,来实现在本公开中说明的通信方法。
[0654]
例如,本说明书所记载的ap、终端等的通信装置可以具备fpga以及cpu中的至少一方,通信装置可以具备用来从外部获得用于使fpga以及cpu的至少一方工作的软件的接口。而且,通信装置可以具备用于存放从外部获得的软件的存储部,可以通过根据存放的软件使fpga、cpu工作,来实现本公开中说明的信号处理。
[0655]
另外,在本说明书中记载的“感测”或“感测处理”至少包括如下处理之一,这些处理是指:对物体的位置进行检测的处理、对物体的有无进行检测的处理、对物体的材质进行预测的处理、对物体的动作进行检测的处理、对能够执行感测的装置的周围状况进行估计的处理、对能够进行感测的装置与物体的距离进行估计的处理、对物体的外形进行检测的处理。另外,在对物体的位置进行检测的处理中,会有物体的检测与物体的动作的检测同时进行的情况。并且,在对物体的有无进行检测的处理、或对物体的外形进行检测的处理中,也有确定对象物的情况。
[0656]
另外,在上述实施方式中,当检测到物体(人、动物、车辆等)时,可以按下快门,即可以拍摄静止图像。并且,当检测到物体时,也可以拍摄运动图像。进行的检测中,可以是预先规定的姿势。
[0657]
并且,感测例如可以通过采用了电波的无线来进行,也可以采用更高频率的无线,例如可以采用光来进行感测。
[0658]
针对图14所示的感测用的装置与图15所示的通信用的装置,例如经由接口进行连接,从而可以实现能够进行感测和通信的图16所示的能够进行感测以及通信的装置。
[0659]
另外,利用空间的感测的目的或用途、利用环境是多样化的,可以按照用途或利用环境,检测成为对象的物体、或者检测与成为对象的物体的距离、想要检测的距离的精确度、允许的延迟时间、或者想要与物体的检测同时获得的信息等可以不同。因此,可以按照利用空间的感测的目的或用途、利用环境,来对感测方法进行切换,或者可以组合多个的感测方法,获得与目的对应的感测结果的发送装置以及发送方法则成为一种需求。
[0660]
在上述形态的检测装置中,通过进行利用了电波的与物体之间的距离的检测、利用了图像信息的检测位置的控制,从而能够容易地对距离的检测对象的物体进行确定,来进行距离的检测。
[0661]
例如,根据被显示在具有触控面板等显示部和输入部的功能的装置的映像,在用户对检测对象的物体进行指定、或者输入选择的信号的情况下,进行采用了电波的感测的对象物能够容易地由用户指定。
[0662]
并且,例如,通过使用了以摄像部获得的图像信息的图像处理,在对成为检测对象的物体进行检测,并对检测到的物体之间的距离进行测量的情况下,能够将图像信息中包括的颜色或形状等特征量用于物体的检测,这与仅通过电波进行检测的情况相比,能够促进物体的检测精确度的提高、以及物体的识别能力的提高。
[0663]
在本公开中以三角测量为例进行了说明。以下利用图66对使用三角测量,来测量或者估计位置的其他的方法进行说明。
[0664]
处理a:
[0665]
在图66中,第1装置6601例如利用电波来发送信号。于是,该信号在第2装置6602反射,第1装置6601得到该反射的信号,据此知道“第1装置6601与第2装置6602的距离”。另外,第1装置6601与第2装置6602也可以共享“第1装置6601与第2装置6602的距离”的信息。
[0666]
处理b:
[0667]
第1装置6601例如利用电波来发送信号。于是,该信号在对象物(物体)6603反射,第1装置6601得到该反射的信号,从而知道“第1装置6601与对象物(物体)6603的距离”。另外,第1装置6601与第2装置6602也可以共享“第1装置6601与对象物(物体)6603的距离”的
信息。
[0668]
处理c:
[0669]
第2装置6602例如利用电波来发送信号。于是,该信号在对象物(物体)6603反射,第2装置6602获得该反射的信号,从而知道“第2装置6602与对象物(物体)6603的距离”。另外,第2装置6602与第1装置6601可以共享“第2装置6602与对象物(物体)6603的距离”的信息。
[0670]
处理d:
[0671]
第1装置6601以及/或者第2装置6602通过处理a、处理b、处理c,获得“第1装置6601与第2装置6602的距离”的信息、“第1装置6601与对象物(物体)6603的距离”的信息、“第2装置6602与对象物(物体)6603的距离”的信息,利用这些信息来进行三角测量,据此能够知道对象物(物体)6603的位置。
[0672]
接着,对与上述不同的方法进行说明。
[0673]
处理e:
[0674]
第1装置6601以及/或者第2装置6602例如以设置的时刻来保持“第1装置6601和第2装置6602的距离”的信息。
[0675]
处理f:
[0676]
第1装置6601例如利用电波来发送信号。于是,该信号在对象物(物体)6603反射,第1装置6601获得该反射的信号,据此知道“第1装置6601与对象物(物体)6603的距离”。另外,第1装置6601与第2装置6602可以共享“第1装置6601与对象物(物体)6603的距离”的信息。
[0677]
处理g:
[0678]
第2装置6602例如利用电波来发送信号。于是,该信号在对象物(物体)6603反射,第2装置6602获得该反射的信号,据此知道“第2装置6602与对象物(物体)6603的距离”。另外,第2装置6602与第1装置6601可以共享“第2装置6602与对象物(物体)6603的距离”的信息。
[0679]
处理h:
[0680]
第1装置6601以及/或者第2装置6602通过处理e、处理f、处理g,获得“第1装置6601与第2装置6602的距离”的信息、“第1装置6601与对象物(物体)6603的距离”的信息、“第2装置6602与对象物(物体)6603的距离”的信息,利用这些信息来进行三角测量,据此能够知道对象物(物体)6603的位置。另外,可以由第1装置6601以及第2装置6602构成一个装置。
[0681]
在本公开中,对使姿势与装置的工作联动进行说明。以下对用于使姿势与装置的工作联动的登记处理的例子进行说明。
[0682]
在本公开的实施方式7中,对使被登记的第1姿势、与装置#a的“发出声音”或者“振动”等的工作即第1工作的联动的例子进行说明。此时,对第1姿势与装置#a的工作进行组合,作为联动工作而登记的处理,例如可以利用用于设定设备#a中的设备的联动工作的设定画面等来进行。
[0683]
例如,为了使姿势与设备的工作联动,用户操作设备#a,当打开设定画面时,在设定画面显示一个或多个候选姿势。在此,当用户从设定画面上显示的一个或者多个候选姿势中选择第1姿势时,在装置#a被允许利用的一个或者多个候选工作被显示在设定画面。当
用户从多个候选工作中选择第1工作时,是否将第1姿势与第1工作联动的姿势和设备工作作为组合来决定的确认画面被显示,通过用户进行确认的输入,来进行登记。
[0684]
另外,采用了上述的设定画面的姿势与设备工作的联动的登记方法是多个联动登记方法的一个例子,本公开中的姿势与设备工作的联动登记方法并非受上述的方法所限。
[0685]
例如,不是在姿势的选择后来选择联动的工作,而可以在联动的工作的选择后来选择姿势。在这种情况下,在选择了联动的工作后,能够进行联动的多个姿势候选被显示在设定画面。
[0686]
另外,如该例子所示,用于使姿势与装置的工作联动的多个的处理的流程、多个的处理的顺序并非受本说明书中的记载所限。
[0687]
并且,姿势与设备工作的联动登记方法也可以通过图形用户界面(gui)来提供。在采用了gui的情况下,例如与多个姿势候选的每一个对应的图符或方框、与多个设备的工作候选的每一个对应的图符或方框等被显示在画面上,可以通过触控面板或鼠标等操作来移动这些图符或方框并进行连接,从而图符或方框间以线等连接器而被连接,据此来描述联动处理,并能够将被描述的联动处理进行登记。
[0688]
另外,在上述说明中,对使姿势与设备的工作联动的情况进行了说明,不过,在设定画面中不仅是姿势,通过音声进行的指示等设备#a所具备的其他的传感器能够检测的周围的环境或用户的行动等,都可以作为能够与设备工作联动的输入的候选,而被有选择性的提示。通过上述构成,由于能够根据姿势以外的用户的行动或利用了设备的场所等,来对设备的工作进行控制,因此,能够实现操作的简单化或误操作的抑制的可能性增高,并会有助于操作性的提高。
[0689]
另外,在上述说明中,虽然对姿势与设备工作的联动在设备#a的设定画面中进行的情况做了说明,也可以利用与设备#a不同的其他的设备来进行设定。在这种情况下,在其他的设备的设定画面,可以由用户从其他的设备中选择,能够进行联动工作的设定的多个候选设备中的成为进行设定的对象的设备。
[0690]
并且,例如在实施方式8的说明中,在能够感测的设备所存在的住宅内等空间中,在将能够感测的设备所检测到的姿势等用户的动作与设备的工作的组合作为联动工作,登记到服务器等的情况下,可以由用户进行如下的选择,例如,能够感测的多个设备、或者传感器中哪个设备或传感器被联动登记的选择,将提供能够利用的工作的多个设备中的哪个设备进行联动登记的选择。
[0691]
例如,为了进行联动登记,用户使用智能手机、平板电脑、计算机、便携式电话等的设备打开设定画面,将能够用于联动登记的一个或者多个候选设备或者候选传感器显示在设定画面。在用户从设定画面中显示的候选设备或者候选传感器中,选择了第1设备时,在被选择的第1设备中显示能够检测的一个或者多个候选姿势。在用户从被显示在设定画面的一个或者多个候选姿势中选择了第1姿势时,能够联动的一个或者多个候选装置被显示在设定画面。在用户从被显示的多个候选装置中选择了装置#a时,在装置#a中被允许利用的一个或者多个候选工作被显示在设定画面。在用户从多个候选工作中选择了第1工作时,是否作为使第1姿势与第1工作联动的姿势和设备工作的组合来决定的确认画面被显示,通过用户进行确认的输入,来进行登记。
[0692]
通过上述的构成,例如由被配置在住宅内等对象空间中的能够联动的任意的设备
或者传感器检测到的姿势、与能够联动的任意的设备的工作的联动登记成为可能。这样,例如即使针对不具备姿势的检测功能的设备,也能够进行基于姿势的工作的控制,因此,能够期待设备的操作性的提高等。
[0693]
另外,利用了上述的设定画面的姿势与设备以及设备工作的组合的联动登记方法只是多个联动登记方法的一个例子,本公开中的姿势与设备以及设备工作的组合的联动登记方法并非受上述的方法所限。
[0694]
例如,可以取代选择了联动的设备或者传感器后,被选择的设备或者传感器能够检测的姿势候选被显示的方式,而是针对多个设备或者传感器,按照设备或者传感器能够检测的一个或者多个姿势候选可以同时被显示在设定画面。同样,可以取代选择了联动的设备后,被选择的设备的工作候选被显示的方式,而是针对多个设备,按照每个设备而能够选择的多个工作被同时显示在设定画面。通过上述的构成,用户仅通过一次的输入操作就能够选择联动的设备与工作的组合,因此,操作变得简单,从而能够提高操作性。并且,也可以不是在选择了姿势后,选择设备的工作,而可以是在选择了设备的工作后,选择姿势。在这种情况下,在选择了设备的工作后,能够联动的多个候选姿势被显示在设定画面。
[0695]
并且,在将多个姿势的组合与设备工作建立对应的情况下,也可以对由彼此不同的多个设备或者传感器能够检测的姿势进行组合来利用。
[0696]
作为对能够由多个设备或者传感器检测的姿势进行了组合的联动工作的一个例子,对在图50或者图55中,ap(访问接入点)n701、音响n702各自具备感测功能的情况进行说明。
[0697]
ap(访问接入点)n701从由ap(访问接入点)n701所具备的第1传感器获得的第1感测数据的时间的变化中,检测事前登记的第1变化模式。在此,第1变化模式是用户进行了第1姿势的情况下被检测的模式。另外,在此,虽然说明了由ap(访问接入点)n701执行从第1感测数据检测第1变化模式的处理,检测处理例如也可以由图50的云服务器n720、图55的服务器q101感测数据或者其他的设备等其他的设备来执行。在这种情况下,ap(访问接入点)n701将第1感测数据,经由网络传送到其他的设备,在该其他的设备中利用第1感测数据,进行包括第1变化模式的一个或者多个变化模式的检测处理。
[0698]
音响n702从由音响n702所具备的第2传感器获得的第2感测数据的时间的变化中,检测事前登记的第2变化模式。在此,第2变化模式是用户进行了第1姿势的情况下被检测的模式。另外,在此,虽然说明了由音响n702执行从第2感测数据检测第2变化模式的处理,检测处理例如也可以由ap(访问接入点)n701、图50的云服务器n720、图55的服务器q101感测数据或者其他的设备等其他的设备来执行。在这种情况下,音响n702将第1感测数据经由网络传送给其他的设备,在该其他的设备中利用第1感测数据,进行包括第2变化模式的一个或者多个变化模式的检测处理。另外,在进行检测处理的其他的设备中,考虑到安全等,可以限制为ap(访问接入点)n701这种能够直接进行无线通信的设备、直接以有线的通信电缆来连接的设备。
[0699]
在此,对将彼此不同的多个设备或者传感器进行组合,来用于姿势检测的第1例进行说明。在第1例中,在进行联动功能登记时,在从第1感测数据的第1变化模式的检测、从第2感测数据的第2变化模式的检测这双方发生了的情况下,例如以进行第4工作来建立对应后登记,第4工作例如是指,“提高从音响n702所搭载的例如扬声器输出的声音的音量、或
者、增大以从音响输出端子输出的音声信号传输的音声成分的振幅”、或者“降低从音响n702所搭载的例如扬声器输出的声音的音量、或者减小以从音响输出端子输出的音声信号传输的音声成分的振幅”等。即,在从从第1感测数据检测到第1变化模式、从第2感测数据检测到第2变化模式的情况下,由音响n702进行第4工作。
[0700]
作为上述的构成中的联动工作的一个例子,对用户进行了与第1姿势不同的第2姿势的情况进行说明。在用户进行第2姿势时,从ap(访问接入点)n701的位置,获得与第1姿势类似的感测结果,从音响n702的位置,获得不与第1姿势类似的感测结果。在这种情况下,在仅利用了第1感测数据的判断中,第1变化模式被检测,在音响n702,第4工作被执行。这是对于进行了第2姿势的用户来说,并非是有意识进行的动作。另外,在除了第1感测数据以外,还利用第2感测数据进行了判断的情况下,从第2感测数据中不会检测到第2变化模式,因此,第4工作不被执行。即,通过利用具有上述的多个的感测功能的设备或者传感器,进行用户的姿势的判断,将判断结果与任意的设备的工作进行联动的构成,则能够期待抑制用户不需要的设备工作的发生。
[0701]
接着,对将彼此不同的多个设备或者传感器进行组合,用于姿势检测的第2例进行说明。在第2例中,在进行联动功能登记时,第1变化模式从第1感测数据被检测,且第2变化模式没有从第2感测数据被检测到的情况下,以执行第4工作的方式建立对应来登记。即,在从第1感测数据检测到第1变化模式、从第2感测数据没有检测到第2变化模式的情况下,在音响n702,第4工作被执行。
[0702]
作为上述的构成中的联动工作的一个例子,对用户在能够从与音响n702近的位置等的ap(访问接入点)n701进行感测,且从音响n702也能够进行感测的位置,进行了第1姿势的情况进行说明。在这种情况下,由于从第1感测数据检测到第1变化模式、从第2感测数据检测到第2变化模式,因此,音响n702不执行第4工作。接着,作为上述的构成中的联动工作的其他的例子,对用户在远离音响n702的位置等的ap(访问接入点)n701能够进行感测、且从音响n702不能进行感测的位置(即音响n702的感测区域外的位置),进行了第1姿势的情况进行说明。在这种情况下,由于从第1感测数据检测第1变化模式,从第2感测数据没有检测到第2变化模式,因此,音响n702不执行第4工作。
[0703]
在上述说明中,对在从ap(访问接入点)n701的感测结果,检测到第1姿势、从音响n702的感测结果没有检测到第1姿势的情况下,音响n702进行第4工作的情况的例子进行了说明,利用本公开中的具有多个的感测功能的设备或者传感器,来判断用户是否做出姿势,并且将判断结果与任意的设备的工作进行联动的构成,并非受这些例子所限。
[0704]
例如,音响n702所执行的感测不进行姿势的检测,而可以是判断周围是否有物体存在的感测。在这种情况下,取代“从音响n702的感测结果没有检测到第1姿势”这一条件,例如采用“从音响n702的感测结果没有检测到周围有物体存在”这一条件。在此,“从音响n702的感测结果没有检测到周围有物体的存在”是指,例如在实施方式8或者9中说明的初期感测,检测到的物体以外的物体没有被检测到的状态、与在初期感测时得到的第2感测数据类似的第2感测数据被获得的状态。
[0705]
并且,在从ap(访问接入点)n701的感测结果检测到第1姿势、从音响n702的感测结果检测到第1姿势的情况下,音响n702执行与第4工作不同的第5工作,在从ap(访问接入点)n701的感测结果检测到第1姿势、从音响n702的感测结果没有检测到第1姿势的情况下,音
响n702可以执行第4工作。
[0706]
如以上说明所示,通过利用具有多个感测功能的设备或者传感器,来进行用户是否做出了姿势的判断,将判断结果与任意的设备的工作进行联动的构成,即使用户做出了相同的姿势,也能够按照用户的位置或朝向、姿勢等,来对是否进行联动工作进行切换,并且能够根据用户的位置或朝向、姿勢等,来对执行的设备工作进行切换。这样,能够提高用户对设备的操作性,从而能够期待抑制用户不需要的设备工作的发生。
[0707]
并且,对于上述的以多个设备或者传感器的感测数据能够检测的事项和设备工作的联动登记方法,也可以利用图形用户界面(gui)来提供。在采用了gui的情况下,例如,与以多个设备或者传感器的感测数据能够检测的事项的候选的每一个对应的图符或方框、与多个设备的工作候选的每一个对应的图符或方框等被显示在画面上,这些图符或方框可以通过触控面板或鼠标等的操作而被移动并连接,通过以线等来对图符或方框之间进行连接,来描述联动处理,并能够对描述的联动处理进行登记。
[0708]
在上述的设定画面以及联动登记方法中说明的例子是,例如进行被指定的姿势是否被检测到、或者被指定的事项是否利用感测数据被检测到这种条件判断,执行在检测到的情况下、或者没有检测到的情况下被指定的设备工作的联动处理,提供对这种联动处理进行描述并登记的功能。不过,本公开能够登记的联动处理并非受此所限。例如,上述的设定画面以及联动登记方法可以提供如下的功能,即为了描述复杂的联动处理,例如使用逻辑和、逻辑积、异或、否定等任意的逻辑运算符,来描述多个姿势间、或姿势与设备工作间的关系性。并且,上述的设定画面以及联动登记方法也可以提供如下的功能,即为了描述复杂的联动处理,例如使用逻辑和、逻辑积、异或、否定等任意的逻辑运算符,来描述多个事项间、或事项与设备工作间的关系性。并且,除了基于感测数据的条件判断以外,例如可以对基于时刻信息的条件判断、或基于与网络连接的设备的数量、或设备所具备的功能等的条件判断等任意的条件判断进行组合来利用。
[0709]
并且,在本公开中,用于感测的传感器并非受限于采用了电波的感测。例如,可以是采用了lidar(light detection and ranging)等光的感测。并且,在对多个传感器进行组合来利用的情况下,组合的传感器也可以是任意的。例如,可以将作为传感器而使用相机而拍摄的映像自身、执行用于提取针对该映像的特征量的图像处理或者模式识别等图像处理而得到的结果,作为感测数据来利用。并且,例如可以将用户所装配的可配戴的终端所具备的例如麦克风、位置传感器、加速度传感器、肌肉电位传感器、温度传感器等任意的传感器所得到数据,作为感测数据来利用。
[0710]
并且,在上述的说明中对如下的情况作为例子进行了说明,即对利用多个感测数据而检测到的事项进行组合的联动工作的登记,由用户利用设定画面或gui等而被登记的情况,不过,也可以采用其他的方法来登记。例如,在向实施方式7所记载的设备的姿势的登记处理中,可以自动地被制作。例如,在实施方式8或者9所说明的系统中,在用户指示开始姿势的登记时,在用户做出姿势的期间中,同一设备或者彼此不同的多个设备所具备的第1传感器和第2传感器分别进行感测数据的获得,对由各自的传感器得到的感测数据的时间的变化的模式进行存储。在此之后,对登记的姿势是否被执行的判断,使用由第1传感器得到的感测数据和由第2传感器获得的感测数据来进行。通过上述构成,能够得到的效果是,能够简化对利用多个感测数据而检测到的事项进行了组合的联动工作的登记。
[0711]
另外,在采用利用电波来进行感测的传感器的情况下,在上述的处理中所使用的感测数据例如可以是示出以点云网格等任意的形式表现的三维的位置或形状的数据,针对接收信号进行任意的信号处理而得到的数据,例如根据导频码元或基准信号而被估计的传输路径特性、基準信号与接收信号的相关值或者ofdm信号中的子载波间的相位差等数据。并且,感测数据例如可以是提取了如下感测结果的差分的数据,这些感测结果是指,在上述的初期感测等没有移动的对象物的状态下得到的感测结果、为了对象物的检测等而进行的通常的感测所得到的感测结果。
[0712]
另外,在上述各实施方式中,各构成要素可以由专用的硬件来构成,也可以通过执行适于各构成要素的软件程序来实现。各构成要素可以通过cpu或者处理器等程序执行部,读出被记录在硬盘或者半导体存储器等记录介质的软件程序,并执行来实现。在此,实现上述各实施方式的发送装置等的软件可以是如下的程序。
[0713]
即该程序使计算机执行如下的发送方法,该发送方法包括:帧构成步骤,构成基于ofdma方式且包括多个时间频率资源的帧,所述时间频率资源是由时间以及频率规定的资源,所述ofdma是指,orthogonal frequency-division multiple access即正交频分多址;以及发送步骤,将在所述帧构成步骤构成的所述帧,通过电波发送,在所述帧构成步骤中,将包括通信用资源和感测用资源的帧作为所述帧来构成,所述通信用资源是配置包括通信数据的码元的时间频率资源,所述感测用资源是配置用于通过电波的感测的码元的时间频率资源,所述电波是在所述发送步骤发送的电波。
[0714]
以上基于实施方式对一个或者多个形态所涉及的发送装置等进行了说明,基于本公开而能够掌握的发明并非受这些实施方式所限定。在不脱离本公开的主旨的范围内,将本领域技术人员所能够想到的各种变形执行于本实施方式而得到的形态、对不同的实施方式的构成要素进行组合而构筑的形态均包括在一个或者多个形态的范围内。
[0715]
本公开包括例如能够适用于无线通信装置、有线通信装置以及具备这些装置的终端或设备的发明。
[0716]
符号说明
[0717]
a3、x101、x201、x301、y101
ꢀꢀꢀ
发送装置
[0718]
a11、n703、n731
ꢀꢀꢀ
设备
[0719]
a111、a121、n151、z206
ꢀꢀꢀ
控制部
[0720]
a112
ꢀꢀꢀ
驱动部
[0721]
a113
ꢀꢀꢀ
传感器
[0722]
a114
ꢀꢀꢀ
通信部
[0723]
a12
ꢀꢀꢀ
检测装置
[0724]
a122、a34
ꢀꢀꢀ
处理部
[0725]
a123
ꢀꢀꢀ
图像传感器
[0726]
a124
ꢀꢀꢀ
应用存储部
[0727]
a125、n104、x204、z202
ꢀꢀꢀ
感测部
[0728]
a21、n701、y1104、z100
ꢀꢀꢀ
ap
[0729]
a22、n402、n710
ꢀꢀꢀ
网络
[0730]
a23、n730
ꢀꢀꢀ
基站
[0731]
a24、x100、x200、x300、y1101
ꢀꢀꢀ
装置
[0732]
a31
ꢀꢀꢀ
帧构成部
[0733]
a32
ꢀꢀꢀ
发送部
[0734]
a33
ꢀꢀꢀ
接收部
[0735]
f81、f82、f83、f91、f92、f93、f94、f95、f101、f102、f103、f104、f105、f111、f112、f113、f114、f121、f122、f123、f124、f131、f132、f133、f134、f141、f142、f143、f144、f151、f152、f153、f154、f161、f162、f163、f164、f171、f172、f173、f174、f181、f182、f191、f192、f201、f202、f203、f211、f212、f213
ꢀꢀꢀ
频带
[0736]
n100、x109、x309、y100
ꢀꢀꢀ
控制信号
[0737]
n102、z201
ꢀꢀꢀ
收发部
[0738]
n103、y1302
ꢀꢀꢀ
调制信号
[0739]
n106、z204
ꢀꢀꢀ
发送用信号选择部
[0740]
n110、z203
ꢀꢀꢀ
收发天线部
[0741]
n112、z205
ꢀꢀꢀ
接收用信号选择部
[0742]
n720
ꢀꢀꢀꢀ
服务器
[0743]
x102_1、x102_n、x202_1、x202_n、y102
ꢀꢀꢀ
发送信号
[0744]
x103_1、x103_n、x104_1、x104_n、y103_1、y103_m、y104_1、y104_n
ꢀꢀꢀ
天线
[0745]
x105_1、x105_n、x205_1、x205_n
ꢀꢀꢀ
接收信号
[0746]
x106、x206、x306、y106
ꢀꢀꢀ
接收装置
[0747]
x107、x207
ꢀꢀꢀ
估计信号
[0748]
x108、x208、x308
ꢀꢀꢀ
估计部
[0749]
x210
ꢀꢀꢀ
发送数据
[0750]
y1002
ꢀꢀꢀ
第4装置
[0751]
y105_1、y105_n
ꢀꢀꢀ
接收信号群
[0752]
y107
ꢀꢀꢀ
物体估计信息
[0753]
y108
ꢀꢀꢀ
第1处理部
[0754]
y109
ꢀꢀꢀ
物体估计信号
[0755]
y110
ꢀꢀꢀ
透镜控制部
[0756]
y1102
ꢀꢀꢀ
物体
[0757]
y1103、z101_1、z101_2、z101_3
ꢀꢀꢀ
终端
[0758]
y111
ꢀꢀꢀ
区域信息
[0759]
y112
ꢀꢀꢀ
选择部
[0760]
y113
ꢀꢀꢀ
显示部
[0761]
y114
ꢀꢀꢀ
区域信号
[0762]
y115
ꢀꢀꢀ
选择区域信号
[0763]
y116
ꢀꢀꢀ
第2处理部
[0764]
y117
ꢀꢀꢀ
估计距离信息
[0765]
y118
ꢀꢀꢀ
工作控制信号
[0766]
y119
ꢀꢀꢀ
透镜部
[0767]
y120、y122
ꢀꢀꢀ
物体信号
[0768]
y1201
ꢀꢀꢀ
通信用基准码元
[0769]
y1202
ꢀꢀꢀ
通信用控制信息码元
[0770]
y1203
ꢀꢀꢀ
通信用数据码元
[0771]
y121
ꢀꢀꢀ
快门部
[0772]
y123
ꢀꢀꢀ
传感器部
[0773]
y124
ꢀꢀꢀ
图像信息
[0774]
y125
ꢀꢀꢀ
存储部
[0775]
y200
ꢀꢀꢀ
附带快门功能的传感器部
[0776]
y400
ꢀꢀꢀ
通信装置
[0777]
y401
ꢀꢀꢀ
数据库
[0778]
y402
ꢀꢀꢀ
查询数据部
[0779]
y403
ꢀꢀꢀ
数据群
[0780]
y404
ꢀꢀꢀ
识别信息
[0781]
y701
ꢀꢀꢀ
第1装置
[0782]
y702
ꢀꢀꢀ
第2装置
[0783]
y703
ꢀꢀꢀ
第1接口
[0784]
y704
ꢀꢀꢀ
第2接口
[0785]
y801
ꢀꢀꢀ
第1’装置
[0786]
y802
ꢀꢀꢀ
第3装置
[0787]
y803
ꢀꢀꢀ
第3接口
[0788]
y804
ꢀꢀꢀ
第4接口
[0789]
y901
ꢀꢀꢀ
第1”装置
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1