稳定模式分隔翅片传感器的制作方法
1.下面描述的实施方式涉及传感器,更具体地,涉及流量传感器。
背景技术:
2.现有的翅片传感器在生成模式分离方面存在问题。通常,同相模式与异相模式之间的频率差是最小的,这会混淆流体流动特性的计算。此外,当在现有翅片传感器中产生卷曲时,几乎没有幅度反差,从该幅度反差中得出产生流动特性的相位差测量值。
3.在现有的翅片传感器中,测量值会因从它们驻留的管道中心朝向传感器组件的显著净移动而混淆。这样做的原因是翅片的旋转轴由板上的翅片定位和驱动器的位置来控制。翅片的旋转轴通常围绕它们驻留的基座的边缘。这会产生不平衡,从而导致校准上的错误和问题。来自同相模式的力导致过程耦接处的净运动。此外,管和平衡杆可能难以或不可能驱动到相等的同相模式形状。产生的不平衡会导致校准和测量误差。这些问题限制了翅片传感器的有效性,使其在许多工业应用中变得不切实际。
4.因此,需要改进的翅片传感器。
技术实现要素:
5.公开了翅片传感器(102)的实施方式。翅片传感器(102)的实施方式具有基座(106),该基座耦接至第一翅片(108a)和第二翅片(108b),翅片传感器(102)还具有耦接至翅片(108a和108b)的至少两个换能器(104a和104b),第一翅片(108a)通过至少一个翅片耦接器(120a和/或120b)耦接至第二翅片(108b)。
6.公开了翅片传感器(102)的另一个实施方式。翅片传感器(102)的另一个实施方式具有基座(106)和平衡肋(118),基座(106)耦接至第一翅片(108a)和第二翅片(108b),翅片传感器(102)还具有耦接至翅片(108a和108b)的至少两个换能器(104a和104b),平衡肋(118)耦接至基座(106)和基座耦接器(116)中的一个或更多个。
7.公开了一种制造翅片耦接器组件的方法的实施方式。该方法的实施方式具有翅片耦接器组件,该翅片耦接器组件具有至少一个翅片(108a和/或108b)和至少一个翅片耦接器(120a和/或120b),该方法包括形成翅片耦接器组件的步骤,在所述翅片耦接器组件中至少一个翅片(108a和/或108b)耦接至至少一个翅片耦接器(120a和/或120b)。
8.公开了制造平衡基座组件的方法的实施方式。制造平衡基座组件的方法的实施方式包括以下步骤:形成基座(106);形成平衡肋(118);以及将平衡肋(118)耦接至基座(106)和基座耦接器(116)中的一个或更多个。
9.公开了使用翅片传感器(102)的方法的实施方式。使用翅片传感器(102)的方法的实施方式,翅片传感器(102)具有在第一翅片(108a)和第二翅片(108b)中驱动振动的驱动换能器(104b),第一翅片和第二翅片(108a和108b)耦接至基座(106),翅片传感器(102)具有接收响应数据的至少一个感测换能器(104a),该方法具有如下步骤:通过至少一个翅片耦接器(120a和/或120b)至少部分地限制相对于第二翅片(108b)的运动的第一翅片(108a)
的运动。
10.公开了使用翅片传感器(102)的方法的实施方式。使用翅片传感器(102)的方法的实施方式可以具有翅片传感器(102),该翅片传感器(102)具有在第一翅片(108a)和第二翅片(108b)中驱动振动的驱动换能器(104b),第一翅片(108a)和第二翅片(108b)耦接至基座(106),翅片传感器(102)具有接收响应数据的至少一个感测换能器(104a),翅片传感器(102)具有平衡肋(118),该方法具有通过平衡肋(118)至少部分地限制基座(106)的运动的步骤。
11.方面
12.根据一方面,公开了翅片传感器(102)的实施方式。翅片传感器(102)的实施方式具有基座(106),该基座耦接至第一翅片(108a)和第二翅片(108b),翅片传感器(102)还具有耦接至翅片(108a和108b)的至少两个换能器(104a和104b),第一翅片(108a)通过至少一个翅片耦接器(120a和/或120b)耦接至第二翅片(108b)。
13.优选地,至少一个翅片耦接器(120a和/或120b)是棒形翅片耦接器(220a)。
14.优选地,至少一个翅片耦接器(120a和/或120b)是撑杆(220c)。
15.优选地,至少一个翅片耦接器(120a和/或120b)是带形翅片耦接器(220b)。
16.优选地,带形翅片耦接器(220b)具有至少一个锥形端。
17.优选地,带形翅片耦接器(220b)是锥形的,使得带形翅片耦接器(220b)的上游(143)端和下游(145)端中的一个或更多个在由纵轴(151)与横轴(cross axis)(131)限定的平面中的截面面积小于带形翅片耦接器(220b)的沿着流动轴线(141)的更中心的位置在由纵轴(151)与横轴(131)限定的平面中的截面面积。
18.优选地,带形翅片耦接器(220b)在由纵轴与流动轴线限定的平面中的截面在纵轴(151)上在截面的上游(143)端和下游(145)端中的一个或更多个处比在截面的上游(143)端与下游(145)端之间的流动轴线(141)上的至少一个中心部分处窄。
19.优选地,至少一个翅片耦接器(120a和/或120b)在在翅片(108a和108b)的对应面上的基本相同的位置处耦接翅片(108a和108b)。
20.优选地,翅片被布置成具有相同的放置位,使得当翅片(108a和108b)被放置在由流动轴线(141)和纵轴(151)限定的平面中的相同或基本相同的定位中时,至少一个翅片耦接器(120a和/或120b)与横轴(131)平行。
21.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和108b)中的每一个上的不同位置处耦接。
22.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和/或108b)中至少之一的面的、由翅片(108a和/或108b)中的至少一个的最下方(downward)(155)和最上游(143)象限部分表示的区域或投影区域中被耦接至翅片(108a和/或108b)中至少之一。
23.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和/或108b)中的至少一个的面的、由翅片(108a和/或108b)中的至少一个的最下方(155)和最下游(145)象限部分表示的区域或投影区域中被耦接至翅片(108a和/或108b)中的至少一个。
24.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和/或108b)中的至少一个的面的、由翅片(108a和/或108b)中的至少一个的最下方(155)和最上游(143)角表示的区域或投影区域中被耦接至翅片(108a和/或108b)中的至少一个。
25.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和/或108b)中的至少一个的面的、由翅片(108a和/或108b)中的至少一个的最下方(155)和最下游(145)角表示的区域或投影区域中被耦接至翅片(108a和/或108b)中至少之一。
26.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和/或108b)中的至少一个的面的、由翅片(108a和/或108b)中的至少一个的中心九分之一部分表示的区域或投影区域中被耦接至翅片(108a和/或108b)中的至少一个。
27.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和/或108b)中的至少一个的面的、由翅片(108a和/或108b)中的至少一个的纵轴(151)上的中间三分之一部分和上游(143)三分之一部分限定的区域或投影区域表示的区域中被耦接至翅片(108a和/或108b)中的至少一个。
28.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和/或108b)中的至少一个的面的、由翅片(108a和/或108b)中的至少一个的纵轴(151)上的中间三分之一部分和下游(145)三分之一部分限定的区域或投影区域表示的区域中被耦接至翅片(108a和/或108b)中的至少一个。
29.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和/或108b)中的至少一个的面的、由翅片(108a和/或108b)中的至少一个的上方(153)三分之一部分和上游(143)三分之一部分限定的区域或投影区域表示的区域中被耦接至翅片(108a和/或108b)中的至少一个。
30.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和/或108b)中的至少一个的面的、由翅片(108a和/或108b)中的至少一个的上方(153)三分之一部分和下游(145)三分之一部分限定的区域或投影区域表示的区域中被耦接至翅片(108a和/或108b)中的至少一个。
31.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和/或108b)中的至少一个的面的、由翅片(108a和/或108b)中的至少一个的下方(155)三分之一部分和上游(143)三分之一部分限定的区域或投影区域表示的区域中被耦接至翅片(108a和/或108b)中的至少一个。
32.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和/或108b)中的至少一个的面的、由翅片(108a和/或108b)中的至少一个的在纵轴(151)上的下方(155)三分之一部分和下游(145)三分之一部分限定的区域或投影区域表示的区域中被耦接至翅片(108a和/或108b)中的至少一个。
33.优选地,至少一个翅片耦接器(120a和/或120b)以增加翅片传感器(102)的浸入元件的轴向刚度的方式耦接至第一翅片(108a)和第二翅片(108b)。
34.优选地,翅片(108a和108b)具有翅片突出部(114a和114b),翅片突出部(114a和114b)穿过基座(106)中的孔突出,换能器(104a和104b)在翅片突出部(114a和114b)处耦接至翅片(108a和108b)。
35.优选地,基座(106)具有浸入侧(342)和外侧(344),翅片突出部(114a和114b)穿过基座(106)突出至外侧(344)。
36.优选地,翅片突出部(114a和114b)具有对应的段,其中,对应的段是至少部分地在横轴(131)上对准的段。
37.优选地,换能器(104a和104b)各自耦接至两个对应的段。
38.优选地,至少一个翅片耦接器(120a和/或120b)在基座(106)的外侧上耦接至翅片(108a和108b)。
39.优选地,至少一个翅片耦接器(120a和/或120b)耦接至翅片突出部(114a或114b)中的至少一个翅片突出部(114a或114b)。
40.优选地,至少一个翅片耦接器(120a和/或120b)耦接至至少一个翅片突出部(114a或114b)的段。
41.优选地,至少一个翅片耦接器(120a和/或120b)在翅片(108a和108b)与至少两个换能器(104a和104b)之间的耦接的下方(155)定位处耦接至翅片(108a和108b)。
42.优选地,至少一个翅片耦接器(120a和/或120b)在基座(106)的外侧(344)上比翅片(108a和/或108b)上换能器(104a至104c)被耦接的位置更靠近基座(106)的定位处耦接至翅片(108a和108b)。
43.优选地,至少一个翅片耦接器(120a和/或120b)在基座(106)的外侧(344)上与距基座(106)相比更靠近翅片(108a和/或108b)上的换能器(104a至104c)被耦接的位置的定位处耦接至翅片(108a和108b)。
44.优选地,翅片突出部(114a和114b)具有对应的段,其中,对应的段是至少部分地在横轴(131)上对准的段。
45.优选地,换能器(104a和104b)各自耦接至两个对应的段。
46.优选地,至少一个翅片耦接器(120a和/或120b)包括第一翅片耦接器(120a)和第二翅片耦接器(120b),第一翅片耦接器(120a)在第二翅片耦接器(120b)耦接至翅片(108a和108b)的位置的上游位置处耦接至翅片(108a和108b)。
47.优选地,感测换能器(104a)在驱动换能器(104b)耦接至翅片(108a和108b)的位置的上游耦接至翅片(108a和108b)。
48.优选地,基座(106)是具有变化的硬度的变化的基座(306)。
49.优选地,变化的基座(306)在变化的基座(306)的中间具有较软的部分,而在变化的基座(306)的边缘具有较硬的部分,中间和边缘是变化的基座(306)在横轴(131)上的中间和边缘。
50.优选地,变化的基座(306)在中间比边缘薄。
51.优选地,变化的基座(306)具有沿横轴(131)变化的材料成分。
52.优选地,变化的基座(306)在横轴(131)上在变化的基座(306)的中间具有较软的材料,而在变化的基座(306)的边缘具有较硬的材料。
53.优选地,翅片传感器(102)还包括平衡肋(118),其耦接至基座(106)和基座耦接器(116)中的一个或更多个,平衡肋(118)被配置成至少部分地限制基座(106)沿基座(106)的中间部分在纵轴(151)上的运动,基座(106)的中间部分是由横轴(131)的中间限定的部分。
54.优选地,翅片传感器(102)还包括仪表电子设备(112),至少两个换能器(104a和104b)中的一个是驱动换能器(104b),仪表电子设备(112)被配置成将表示命令的数据传输至驱动换能器(104b)以便以同相(ip)模式和异相(oop)模式中的一种或更多种驱动翅片(108a和108b)。
55.优选地,至少两个换能器(104a和104b)中的另一个是感测换能器(104a),仪表电
子设备(112)从感测换能器(104a)接收信号数据以使用受控反馈回路来维持驱动模式。
56.优选地,至少一个翅片耦接器(120a和/或120b)中的至少一个和翅片(108a和/或108b)中的至少一个中的一个或更多个具有耦接元件,该耦接元件被配置成将至少一个翅片耦接器(120a和120b)中的至少一个经由耦接元件耦接至翅片(108a和/或108b)中的至少一个。
57.优选地,第一翅片耦接器(120a)具有耦接元件,并且第一翅片(108a)具有另外的耦接元件(120b),其中,耦接元件与另外的耦接元件互补,使得耦接元件被配置成耦接至另外的耦接元件。
58.优选地,耦接元件是第一翅片(108a)中的凹槽。
59.优选地,至少一个翅片耦接器(120a和/或120b)既不是基座(106)的元件,也不是至少两个换能器(104a至104c)中的任何一个的元件。
60.优选地,至少一个翅片耦接器(120a和/或120b)以与基座(106)影响翅片(108a和108b)的运动的方式及至少两个换能器(104a至104c)影响翅片(108a和108b)的运动的方式不同的方式影响翅片(108a和108b)的运动。
61.优选地,至少一个翅片耦接器(120a和/或120b)既不耦接至基座(106)也不耦接至至少两个换能器(104a至104c)中的任何一个。
62.根据一个方面,公开了翅片传感器(102)的另一个实施方式。翅片传感器(102)的另一个实施方式具有基座(106)和平衡肋(118),基座(106)耦接至第一翅片(108a)和第二翅片(108b),翅片传感器(102)还具有耦接至翅片(108a和108b)的至少两个换能器(104a和104b),平衡肋(118)耦接至基座(106)和基座耦接器(116)中的一个或更多个。
63.优选地,平衡肋(118)被配置成至少部分地限制基座(106)沿基座(106)的中间部分在纵轴(151)上的运动,基座(106)的中间部分是由横轴(131)的中间限定的部分。
64.优选地,平衡肋(118)在基座(106)的中间部分处耦接至基座(106)。
65.优选地,平衡肋(118)耦接至基座耦接器(116)的中间部分。
66.优选地,平衡肋(118)被配置成至少部分地防止翅片(108a和108b)在纵轴(151)上的净运动。
67.优选地,平衡肋(118)在第一翅片(108a)与第二翅片(108b)之间耦接至基座(106)。
68.优选地,平衡肋(118)在横轴(131)上的、在基座(106)上的第一翅片(108a)被耦接或将被耦接的定位与基座(106)上的第二翅片(108b)被耦接或将被耦接的不同定位之间的定位处耦接至基座(106)。
69.优选地,平衡肋(118)在横轴(131)上与定位和不同定位等距地耦接。
70.优选地,平衡肋(118)耦接至基座(106),使得平衡肋(118)的中心线(198)平行于流动轴线(141)。
71.优选地,平衡肋(118)在至少一个轴线上关于中心线(198)是对称的。
72.优选地,平衡肋(118)在平衡肋(118)的下游(145)端和平衡肋(118)的上游(143)端中的一个或更多个上在平衡肋(118)的横轴(131)上具有一定厚度,该厚度小于平衡肋(118)的中间部分在横轴(131)上的厚度。
73.优选地,平衡肋(118)在平衡肋(118)的下游(145)端和平衡肋(118)的上游(143)
端中的一个或更多个上在平衡肋(118)的横轴(131)上具有一定厚度,该厚度大于平衡肋(118)的中间部分在横轴(131)上的厚度。
74.优选地,翅片传感器(102)还包括至少一个翅片耦接器(120a和/或120b),该至少一个翅片耦接器(120a和/或120b)耦接至翅片(108a和108b)。
75.优选地,基座(106)是具有变化的硬度的变化的基座(306)。
76.优选地,变化的基座(306)在变化的基座(306)的中间具有较软的部分,在变化的基座(306)的边缘具有较硬的部分,中间和边缘是变化的基座(306)在横轴(131)上的中间和边缘。
77.优选地,变化的基座(306)沿横轴(131)在变化的基座(306)的中间比在变化的基座(306)边缘上薄。
78.优选地,变化的基座(306)具有沿横轴(131)变化的材料成分。
79.优选地,变化的基座(306)在沿横轴(131)的中间具有较软的材料而在边缘具有较硬的材料。
80.优选地,变化的基座(306)的沿横轴(131)在翅片(108a和108b)之间的部分比变化的基座(306)的在横轴(131)上的在翅片(108a和108b)中的每一个与变化的基座(306)的边缘之间的部分软。
81.优选地,较软部分(314)和较硬部分(310和312)可以通过将翅片(108a和108b)中的至少一个耦接成在横轴(131)上与距平衡肋(118)相比更靠近变化的基座(306)的边缘来形成。
82.根据一个方面,公开了一种制造翅片耦接器组件的方法的实施方式。该方法的实施方式具有翅片耦接器组件,该翅片耦接器组件具有至少一个翅片(108a和/或108b)和至少一个翅片耦接器(120a和/或120b),该方法包括形成翅片耦接器组件的步骤,在所述翅片耦接器组件中,至少一个翅片(108a和/或108b)耦接至至少一个翅片耦接器(120a和/或120b)。
83.优选地,耦接组件通过模制形成,使得至少一个翅片耦接器(120a和/或120b)形成为已经耦接至至少一个翅片(120a和/或120b)。
84.优选地,形成翅片耦接器组件包括形成翅片耦接器(120a),其中,翅片耦接器(120a)不同于基座(106)和换能器(104a至104c)。
85.优选地,形成翅片耦接器组件还包括形成至少一个翅片(108a和/或108b)中的翅片(108a)以及将至少一个翅片耦接器(120a和/或120b)中的翅片耦接器(120a)耦接至翅片(108a)。
86.优选地,将翅片耦接器(120a)耦接至翅片(108a)包括:在与翅片(108a)的耦接或将要耦接至基座(106)的定位相比更靠近翅片(108a)的自由边缘(199)的定位处将翅片耦接器(120a)耦接至翅片(108a)。
87.优选地,该方法还包括将至少一个翅片耦接器(120a和/或120b)中的第一翅片耦接器(120a)耦接至翅片(108a和108b)中的两个翅片,以及将至少一个翅片耦接器(120a和/或120b)中的第二翅片耦接器(120b)耦接至翅片(108a和108b)中的两个翅片,其中,第一翅片耦接器(120a)在如下至少一个定位处被耦接,该至少一个定位处于或将处于沿流动轴线(141)与第二翅片耦接器(120b)被耦接的至少一个定位不同的点。
88.优选地,形成具有耦接元件的翅片耦接器组件包括:形成至少一个翅片(108a和/或108b)和至少一个翅片耦接器(120a和/或120b)中的一个或更多个,该耦接元件被配置成促进至少一个翅片(108a和/或108b)与至少一个翅片耦接器(120a和/或120b)之间的耦接。
89.优选地,至少一个翅片(108a和/或108b)在至少一个翅片耦接器(120a和/或120b)的驻留或将驻留在基座(106)的浸入侧(342)上的部分上耦接至至少一个翅片耦接器(120a和/或120b)。
90.优选地,至少一个翅片(108a和/或108b)在至少一个翅片耦接器(120a和/或120b)的驻留或将驻留在基座(106)的外侧(344)上的部分上耦接至至少一个翅片耦接器(120a和/或120b)。
91.优选地,该方法还包括:形成平衡肋(118)并将平衡肋(118)耦接至基座(106)和基座耦接器(116)中的一个或更多个。
92.优选地,基座(106)形成为具有变化的硬度的变化的基座(306)。
93.优选地,至少一个翅片耦接器(120a和/或120b)形成为棒形翅片耦接器(220a)。
94.优选地,至少一个翅片耦接器(120a和/或120b)形成为撑杆(220c)。
95.优选地,至少一个翅片耦接器(120a和/或120b)形成为带形翅片耦接器(220b)。
96.优选地,该方法还包括:形成基座(106)并将基座(106)耦接至翅片(108a和108b)。
97.优选地,翅片(108a和108b)形成为具有翅片突出部(114a和114b),翅片突出部(114a和114b)穿过基座(106)中的孔突出,至少一个换能器(104a和/或104b)在翅片突出部(114a和114b)处耦接至翅片(108a和108b)。
98.优选地,翅片突出部(114a和114b)形成有对应的段,其中对应的段是至少部分地在横轴(131)上对准的段,至少一个翅片耦接器(120a和/或120b)在对应的段处耦接至翅片(108a和108b)。
99.优选地,基座(106)形成为具有变化的硬度的变化的基座(306)。
100.优选地,变化的基座(306)形成为在横轴(131)上在变化的基座(306)的中间部分比变化的基座(306)的边缘软。
101.优选地,该方法还包括:将平衡肋(118)耦接至基座(106)和基座耦接器(116)中的一个或更多个。
102.优选地,至少一个翅片耦接器(120a和/或120b)相对于平衡肋(118)在第一方向(133)上的至少一个位置处和在平衡肋(118)在第二方向(135)上的至少一个位置处耦接至翅片(108a和108b)。
103.优选地,该方法还包括形成仪表电子设备(112)并将仪表电子设备(112)通信地耦接至换能器(104a和/或104b和/或104c),仪表电子设备(112)具有处理器和存储器,存储器配置成存储命令和数据以供处理器执行操作,以及将仪表电子设备(112)配置成以同相和异相模式驱动。
104.根据一个方面,公开了制造平衡基座组件的方法的实施方式。制造平衡基座组件的方法的实施方式包括以下步骤:形成基座(106);形成平衡肋(118);以及将平衡肋(118)耦接至基座(106)和基座耦接器(116)中的一个或更多个。
105.优选地,基座(106)形成为变化的基座(306)。
106.优选地,变化的基座(306)通过在模制中使变化的基座(306)的厚度变化或通过切
除变化的基座(306)的一部分而形成。
107.优选地,使厚度变化,使得在横轴(131)上变化的基座(306)的中间比变化的基座(306)的边缘薄。
108.优选地,变化的基座(306)通过至少沿着横轴(131)使构成变化的基座(306)的材料变化而形成。
109.优选地,使材料变化包括由变化的基座(306)中间的材料构成变化的基座(306)的至少一部分,在横轴(131)上该变化的基座(306)中间的材料比变化的基座(306)的边缘处的材料软。
110.优选地,形成平衡肋(118)包括将平衡肋(118)形成为长形构件。
111.优选地,将平衡肋(118)耦接至基座(106)包括:在基座(106)在横轴(131)上的中间的定位处,将平衡肋(118)耦接至基座(106)。
112.优选地,将平衡肋(118)耦接至基座(106)包括:在基座(106)上的第一翅片(108a)被耦接或将被耦接的定位与基座(106)上的第二翅片(108b)被耦接或将被耦接的不同定位之间的定位处,将平衡肋(118)耦接至基座(106),该定位和该不同定位在横轴(131)上。
113.优选地,在基座(106)上的第一翅片(108a)被耦接或将被耦接的定位与基座(106)上的第二翅片(108b)被耦接或将被耦接的不同定位之间的定位处,将平衡肋(118)耦接至基座(106)包括:在横轴(131)上与该定位和该不同定位等距地耦接平衡肋(118)。
114.优选地,将平衡肋(118)耦接至基座(106)包括:将平衡肋(118)耦接至基座(106),其中平衡肋(118)的中心线(198)平行于流动轴线(141)。
115.优选地,形成平衡肋(118)包括:将平衡肋(118)形成为使得平衡肋(118)在至少一个轴线上关于中心线(198)对称。
116.优选地,形成平衡肋(118)还包括:将平衡肋(118)形成为使得在平衡肋(118)的下游(145)端和平衡肋(118)的上游(143)端中的一个或更多个上的平衡肋(118)的横轴(131)的厚度小于平衡肋(118)在流动轴线(141)上的中间部分在横轴(131)上的厚度。
117.优选地,形成平衡肋(118)还包括:将平衡肋(118)形成为使得在平衡肋(118)的下游(145)端和平衡肋(118)的上游(143)端中的一个或更多个上的平衡肋(118)的在横轴(131)上的厚度大于平衡肋(118)在流动轴线(141)上的中间部分在横轴(131)上的厚度。
118.优选地,该方法还包括:形成翅片(108a和108b)并将翅片(108a和108b)耦接至基座(106)。
119.优选地,该方法还包括形成至少一个翅片耦接器(120a和/或120b)并将至少一个翅片耦接器(120a和/或120b)耦接至翅片(108a和108b)。
120.优选地,所述至少一个翅片耦接器(120a和/或120b)相对于平衡肋(118)在第一方向(133)上耦接至翅片中第一翅片(120a),并且至少一个翅片耦接器(120a和/或120b)相对于平衡肋(118)在第二方向(135)上耦接至翅片中的第二翅片(120b)。
121.优选地,翅片(108a和/或108b)中的至少一个在横轴(131)上的相对于平衡肋(118)的第一方向(133)上的定位处耦接至基座(106),并且与距平衡肋(118)相比,该定位更靠近基座(106)的相对于平衡肋(118)在第一方向(133)上的边缘。
122.优选地,翅片(108a和/或108b)中的至少一个在横轴(131)上的相对于平衡肋(118)的第一方向(133)上的定位处耦接至基座(106),并且与距平衡肋(118)相比,该定位
距基座(106)的相对于平衡肋(118)在第一方向(133)上的边缘更远。
123.优选地,该方法还包括:形成仪表电子设备(112)并将仪表电子设备(112)通信地耦接至换能器(104a和/或104b和/或104c),该仪表电子设备(112)具有处理器和存储器,该存储器被配置成存储命令和数据以供处理器执行操作;以及将仪表电子设备(112)配置成以同相和异相模式驱动翅片(108a和108b)。
124.根据一方面,公开了使用翅片传感器(102)的方法的实施方式。使用翅片传感器(102)的方法的实施方式,翅片传感器(102)具有在第一翅片(108a)和第二翅片(108b)中驱动振动的驱动换能器(104b),第一翅片和第二翅片(108a和108b)耦接至基座(106),翅片传感器(102)具有接收响应数据的至少一个感测换能器(104a),该方法具有如下步骤:通过至少一个翅片耦接器(120a和/或120b)至少部分地限制相对于第二翅片(108b)的运动的第一翅片(108a)的运动。
125.优选地,通过至少一个翅片耦接器(120a和/或120b)至少部分地限制相对于第二翅片(108b)的运动的第一翅片(108a)的运动包括:至少部分地限制第一翅片(108a)的自由边缘(199)相对于第二翅片(108b)的自由边缘(199)的运动。
126.优选地,振动由驱动换能器(104b)驱动以便以异相(oop)模式驱动翅片(108a和108b)。
127.优选地,异相(oop)模式表示第一翅片(108a)和第二翅片(108b)的运动之间的约180
°
的相位分离。
128.优选地,通过至少一个翅片耦接器(120a和/或120b)至少部分地限制相对于第二翅片(108b)的运动的第一翅片(108a)的运动包括:至少部分地限制至少一个翅片耦接器(120a和/或120b)耦接至第一翅片(108a)的任何定位处的相对于第二翅片(108b)的运动的第一翅片(108a)的运动。
129.优选地,至少一个翅片耦接器(120a和/或120b)不直接限制基座(106)的任何元件的移动,至少一个翅片耦接器(120a和/或120b)不耦接至基座(106)的元件、也不是基座(106)的元件。
130.优选地,该方法还包括用平衡肋(118)至少部分地限制基座(106)的运动。
131.根据一方面,公开了使用翅片传感器(102)的方法的实施方式。使用翅片传感器(102)的方法的实施方式可以具有翅片传感器(102),该翅片传感器(102)具有在第一翅片(108a)和第二翅片(108b)中驱动振动的驱动换能器(104b),第一翅片(108a)和第二翅片(108b)耦接至基座(106),翅片传感器(102)具有接收响应数据的至少一个感测换能器(104a),翅片传感器(102)具有平衡肋(118),该方法具有通过平衡肋(118)至少部分地限制基座(106)的运动的步骤。
132.优选地,通过平衡肋(118)至少部分地限制基座(106)的运动包括:至少部分地限制基座(106)沿基座(106)的中间部分在纵轴(151)上的运动,中间部分是由横轴(131)的中间限定的部分。
133.优选地,通过平衡肋(118)至少部分地限制基座(106)的运动包括:至少部分地防止翅片(108a和108b)在纵轴(151)上的净运动。
134.优选地,通过平衡肋(118)至少部分地限制基座(106)的运动包括:至少部分地防止翅片传感器(102)在纵轴(151)上的净运动。
135.优选地,至少部分地限制基座(106)的运动包括:至少部分地在横轴(131)上在基座(106)上第一翅片(108a)被耦接或将被耦接的定位与基座(106)上第二翅片(108b)被耦接或将被耦接的不同定位之间的定位处限制基座(106)。
136.优选地,至少部分地限制基座(106)的运动包括:至少部分地限制基座(106)的在横轴(131)上与该定位和该不同定位等距的定位处的运动。
137.优选地,至少部分地限制基座(106)的运动包括:至少部分地限制基座(106)的至少沿着基座(106)的平行于流动轴线(141)的直线部分的运动。
138.优选地,至少部分地限制基座(106)的运动包括:至少部分地限制基座(106)的运动,使得基座(106)的下游(145)端和基座(106)的上游(143)端中的一个或更多个的移动被限制少于基座(106)的中间,基座(106)的中间是基座(106)在流动轴线(141)上的中间。
139.优选地,至少部分地限制基座(106)的运动包括:至少部分地限制基座(106)的运动,使得基座(106)的下游(145)端和基座(106)的上游(143)端中的一个或更多个的移动被限制多于基座(106)的中间,基座(106)的中间是基座(106)在流动轴线(141)上的中间。
附图说明
140.在所有附图中,相同的附图标记代表相同的元件。应当理解,附图不一定按比例绘制。
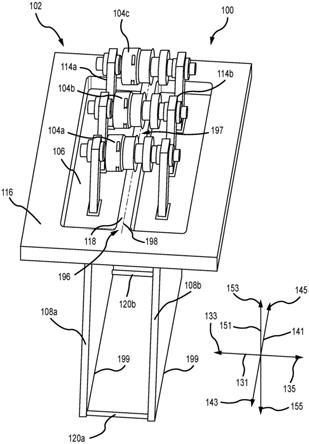
141.图1示出了具有翅片型传感器的流量传感器系统100的实施方式的透视图。
142.图2a示出了具有棒形翅片耦接器220a的翅片耦接器组件200a的实施方式的透视图。
143.图2b示出了具有带形翅片耦接器220b的翅片耦接器组件200b的实施方式的透视图。
144.图2c示出了具有撑杆形翅片耦接器220c的翅片耦接器组件200c的实施方式的透视图。
145.图3是具有翅片传感器302的流量传感器系统300的实施方式的剖视图,该翅片传感器302具有在平衡基座组件中的变化基座306。
146.图4示出了计算机系统400的实施方式的框图。在实施方式中,计算机系统400可以是仪表电子设备,例如,仪表电子设备112。
147.图5示出了用于使用翅片传感器102的翅片耦接器组件的方法500的实施方式的流程图。
148.图6示出了用于使用翅片传感器102的平衡基座组件的方法600的实施方式的流程图。
149.图7示出了制造翅片传感器102的翅片耦接器组件的方法700的实施方式的流程图。
150.图8示出了制造翅片传感器102的平衡基座组件的方法800的实施方式的流程图。
151.图9示出了制造翅片传感器102的平衡基座和翅片耦接器组件的方法900的实施方式的流程图。
152.图10示出了在以同相(ip)模式和异相(oop)模式驱动的基座106的浸入侧342上具有和不具有翅片耦接器120a和120b的翅片传感器102的实施方式的比较1000。
153.图11示出了在未变形和变形定位处具有和不具有平衡肋118的翅片传感器102的实施方式的比较1100。
154.图12示出了在以同相(ip)模式和异相(oop)模式驱动的基座106的外侧344上具有和不具有翅片耦接器120a和120b的翅片传感器102的实施方式的比较1200。
具体实施方式
155.图1至图12以及下面的描述描绘了具体的示例,以教导本领域技术人员如何制造和使用翅片传感器的翅片耦接器组件和平衡基座组件的实施方式的最佳模式。出于教导发明原理的目的,已经简化或省略了一些传统方面。本领域技术人员将理解落入本说明书的范围内的这些示例的变型。本领域技术人员将理解,以下描述的特征可以以各种方式组合,以形成用于翅片传感器的翅片耦接器组件和平衡基座组件的多种变型。因此,下面描述的实施方式不限于下面描述的具体示例,而仅由权利要求及其等同物来限定。
156.图1示出了具有翅片型传感器的流量传感器系统100的实施方式的透视图。系统100具有翅片传感器102,该翅片传感器102具有上游换能器104a、驱动换能器104b、下游换能器104c、基座106、第一翅片108a、第二翅片108b、管道110(未示出)、仪表电子设备112(未示出)、第一翅片突出部114a、第二翅片突出部114b、基座耦接器116、平衡肋118、第一翅片耦接器120a、第二翅片耦接器120b、具有第一方向133和第二方向135的横轴131、具有上游方向143和下游方向145的流动轴线141、具有上方方向153和下方方向155的纵轴151、平衡肋的末端196、平衡肋的中间部分197、平衡肋的中心线198以及自由边缘199。图1至图4和图10至图12中的图像可能没有相对于系统100的各种实施方式成比例。
157.流动系统100可以使用翅片传感器102来确定流动特性。例如,翅片传感器102可以驱动翅片传感器102的元件,翅片传感器102使用换能器来在翅片传感器102的元件中驱动振动。换能器可以是任何类型的驱动装置或拾取装置,例如压电装置或磁体和线圈布置。换能器中的任何、一些或所有换能器可以测量由换能器测量的信号的相位差或时间差,以便确定流动特征,例如确定质量流率。在实施方式中,翅片传感器102是科里奥利流量传感器,该科里奥利流量传感器使用可以依赖翅片传感器102中的元件上的科里奥利力来生成这些流率的换能器布置。相位差或时间延迟可以由驱动元件和测量元件生成,例如,相位差或时间延迟可以通过使基座振动并测量换能器中的响应来生成,通过使翅片振动并测量翅片处的响应来生成,或者通过将用于生成振动的信号(驱动信号)与翅片处的响应进行比较来生成。流率测量结果可以根据由换能器104a至104c获取的相位差和/或频率响应信号生成。翅片传感器102可以用于通过确定振荡频率并使用本领域已知的根据这些频率确定密度的方法来生成密度测量结果。例如,密度测量结果可以根据由换能器104a至104c获取的频率响应信号生成。粘度测量结果可以在翅片传感器102中根据换能器测量的相位差或时间延迟、例如基于两个可能得出的非共振频率驱动的相位差而得出。振动计的流率、密度和粘度测量方法在本领域中都是公认的。可以使用翅片耦接器将翅片耦接在特定位置处。在各种实施方式中,翅片传感器102可以是科里奥利流量计、翅片计量器或叉式计量器(可能具有翅片或齿(tine))中的一种或更多种。
158.翅片耦接器120a和120b可以用于增强同相(下文中称为“ip”)模式与异相(下文中称为“oop”)模式之间的模式分隔。在实施方式中,oop模式可以是其中第一翅片108a与第二
翅片108b以彼此相差180度或大约相差180度的相位差振动的模式。此外,翅片耦接器可以引入更多的卷曲运动,以增强翅片传感器102测量的灵敏度。在实施方式中,基座106可以是沿着横轴131具有薄的中间部分和厚的外部部分的板。基座106还可以具有控制挠曲的平衡肋118,并且可以限制翅片传感器102在纵轴151上相对于基座所耦接的管道的净运动。
159.在实施方式中,翅片传感器102可以具有两个翅片,第一翅片108a和第二翅片108b。第一翅片108a和第二翅片108b是在翅片传感器102的工作期间至少部分地浸入在流动流体中的翅片。考虑了使用更多翅片的实施方式。例如,考虑具有3个、4个、5个、6个、7个、8个、9个、10个、11个、12个、13个、14个、15个、16个或更多个翅片的实施方式。在其他实施方式中,可以使用齿来代替翅片,其中齿具有本说明书中公开的翅片108a和108b的相同特性和布置中的一些或全部。当说明书提到翅片时,说明书也考虑了使用齿的实施方式。
160.翅片108a和108b可以彼此平行地布置,并且可以布置成其长度平行于或基本平行于管道中流体流动的预期路径。翅片108a和108b可以被布置成使得它们具有延伸穿过基座106的部分,翅片108a和108b可能在基座106的不具有翅片108a和108b被浸入在流动流体中的部分(如图3中所示,具有被浸入的元件的一侧是浸入侧342)的一侧(图3的外侧344)上具有翅片突出部114a和114b。
161.翅片108a和108b可以具有自由边缘199,自由边缘199可能被定义为翅片的最下方155边缘。翅片耦接器(例如,翅片耦接器120a和120b)可以用于可能通过将第一翅片108a的自由边缘199的一部分耦接至第二翅片108b的自由边缘199的一部分或者可能通过将翅片108a和108b的其他部分进行耦接来限制第一翅片108a的自由边缘199相对于耦接的第二翅片108b的运动。
162.翅片108a和108b可以使用一个或更多个翅片耦接器彼此耦接。翅片耦接器120a和120b是将翅片108a和108b的运动耦合在翅片108a和108b上的特定位置处的元件。出于本说明书的目的,第一翅片耦接器120a被示出为相对于第二翅片耦接器120b的上游143翅片耦接器。在各种实施方式中,可以使用任意数目的翅片耦接器来耦接相邻的翅片和/或非相邻的翅片。例如,耦接每个经耦接的翅片组的耦接器可以是1个、2个、3个、4个、5个、6个、7个、8个、9个、10个、11个、12个、13个、14个、15个、16个以及任何其他数目的耦接器120a和120b。在各种实施方式中,一定数目的翅片可以被耦接,而一定数目的翅片可以不被耦接,例如,所有的翅片、四分之三的翅片、三分之二的翅片、一半的翅片、四分之一的翅片、三分之一的翅片、八分之一的翅片、十分之一的翅片或者类似比例的翅片可以被耦接。
163.在实施方式中,翅片108a和108b中的一个、组合或全部可以延伸或基本上延伸基座106的整个长度。例如,在该上下文中,基本上可以意指:翅片没有延伸到基座106的用于将基座耦接至管道的部分,或者翅片没有延伸到刚好邻近基座106的耦接至管道110和/或基座耦接器116的部分的基座的部分。
164.管道110是流体可以流过的管道。可以使用本领域已知的任何类型的管道。管道110没有在图1中示出,但是流体管道以及流量传感器例如翅片传感器102耦接至管道的方式在流量传感器领域中是熟知的。
165.翅片耦接器120a和120b可以在翅片之间的多个位置处耦接翅片108a和108b。例如,翅片耦接器120a和120b可以在翅片108a和108b的对应面上的基本相同的位置处耦接翅片108a和108b,翅片可能被布置成具有相同的放置位,使得当翅片108a和108b被放置在由
流动轴线141与纵轴151限定的平面中的相同定位时(例如,如果翅片具有相同的形状和尺寸),翅片耦接器120a和120b平行于或基本平行于横轴131,或者翅片耦接器120a和120b可以耦接在各个翅片108a和108b中的每一个上的不同位置处。翅片耦接器120a和120b可以在翅片108a和108b中的至少一个的由如下内容所表示的区域中的定位中的一个、组合或者全部处被耦接至翅片108a和108b中的一个或更多个:翅片108a和108b中的至少一个的最下方155和上游143象限部分(该象限可能不包括翅片108a和108b中的至少一个的至少一个的中心定位);翅片108a和108b中的至少一个的最下方155和下游145象限部分(该象限可能不包括翅片108a和108b中的至少一个的至少一个的中心定位);翅片108a和108b中的至少一个的最下方155和上游143角;翅片108a和108b中的至少一个的最下方155和下游145角;翅片108a和108b中的至少一个的中央九分之一区域部分;由翅片108a和108b中的至少一个的纵轴151上的中间三分之一区域部分与上游143三分之一部分限定的区域;由翅片108a和108b中的至少一个的纵轴151上的中间三分之一部分与下游145三分之一部分限定的区域;由翅片108a和108b中的至少一个的纵轴151上的上方153三分之一部分与上游143三分之一部分限定的区域;由翅片108a和108b中的至少一个的纵轴151上的上方153三分之一部分与下游145三分之一部分限定的区域;由翅片108a和108b中的至少一个的纵轴151上的下方155三分之一部分与上游143三分之一部分限定的区域;由翅片108a和108b中的至少一个的纵轴151上的下方155三分之一部分与下游145三分之一部分限定的区域;和/或类似区域。
166.考虑了翅片的面不具有平坦表面的实施方式。在这种情况下,在前面的段落中陈述的区域可以表示从由流动轴线141与纵轴151限定的任何平面中的最大翅片截面的那些相关区域的投影,所述相关区域投影到面向另一翅片的内面(例如108b的内面)的翅片的面(例如108a的内面)的区域,所述相关区域沿着横轴上的线进行投影。出于权利要求的目的,这些区域被称为“投影区域”。
167.翅片耦接器120a和120b可以具有不同的形状和确认。例如,翅片耦接器120a和120b中的一个或更多个可以是例如棒形或圆柱形、撑杆、梁(当不存在流动时,可能具有相对于由流动轴线141与纵轴151限定的平面的正方形、圆形、三角形、其他多边形、椭圆形和/或类似形状的截面)、具有平坦区域(当不存在流动时,该区域相对于由流动轴线141与纵轴151限定的平面是平坦的或基本平坦的,或者相对于由纵轴151与横轴131限定的平面是平坦的)的带、螺旋结构等。本说明书考虑了不同形状的翅片耦接器120a和/或120b的组合,例如,翅片传感器102可以具有作为棒的上游翅片耦接器120a和由一个或更多个撑杆表示的下游翅片耦接器120b。这些仅是示例性的,并且所有形状和确认的组合都被说明书所考虑。
168.翅片耦接器120a和120b可以由任意数目的材料构成,并且可以具有与管道110、基座106、换能器104a至104c、翅片108a和108b和/或翅片108a和108b的与翅片耦接器120a和/或120b耦接的部分中的一个、任意组合或全部不同的材料。翅片耦接器120a和120b可以由贯穿翅片传感器102的相同的材料构成,或者可以在它们之间具有不同的成分。
169.翅片耦接器120a和120b中的一个或更多个可以由柔性材料制成以允许翅片耦接器120a和120b中的一个或更多个的一些挠曲和模式柔性,这可能在一些模式中比在其他模式中增强翅片108a和108b中的一个或更多个或翅片耦接器120a和120b中的一个或更多个的运动的灵活性。翅片耦接器120a和120b中的一个或更多个可以由刚性材料制成以限制翅片耦接器120a和120b中的一个或更多个的挠曲和模式柔性,这可能在一些模式下比在其他
模式下增强翅片108a和108b中的一个或更多个或翅片耦接器120a和120b中的一个或更多个的运动的灵活性。翅片耦接器120a和120b可以与翅片108a和108b组装在一起,该组件在本说明书中称为翅片耦接器组件。
170.当翅片120a和120b以异相模式被驱动时,翅片耦接器120a和120b可以增加翅片108a和108b的卷曲。翅片耦接器120a和120b可以增加轴向刚度,这可以导致卷曲增强。增强的卷曲可以允许翅片传感器102更好地将翅片耦合至流动的介质并引起科里奥利响应,这可能类似于典型的科里奥利质量流量计、叉式计量器或翅片计量器。此外,与在同相模式中类似驱动的翅片传感器102相比,在异相模式中通过包括翅片耦接器120a和120b而在翅片108a和108b中生成的卷曲可以提供不同的、潜在更高的频率,这潜在地生成模式分离。由翅片耦接器120a和120b提供的轴向刚度也可以导致翅片108a和108b的自由边缘199尖端静止、基本静止,或者至少限制翅片108a和108b的自由边缘相对于翅片108a和108b在翅片108a和108b没有被翅片耦接器120a和120b耦接的情况下将具有的移动性的移动性,这可以减小它们在流动的介质中的阻力,并且可以对流体结构的相互作用产生较少的影响。
171.翅片耦接器120a和120b应当被理解为独立于基座106和换能器104a至104c作用的功能性元件。翅片耦接器120a和120b可以与基座106和换能器104a至104c分离,并且翅片耦接器120a和120b可以是没有耦接至换能器104a至104c以及基座106中的一个或更多个(可能没有耦接至任何一个)的元件。在这种布置中,翅片耦接器120a和120b可以以不同于基座106和换能器104a至104c影响翅片108a和108b的运动的方式来影响翅片108a和108b的运动。
172.出于本说明书的目的,翅片耦接器组件是其中至少一个翅片(108a和/或108b)被耦接至至少一个翅片耦接器(120a和/或120b)的组件。考虑了更多翅片耦接器与翅片被耦接的实施方式。例如,在实施方式中,翅片耦接器组件具有通过例如两个(如图所示,120a和120b)、三个、四个、五个、六个或更多个翅片耦接器进行耦接的两个翅片(108a和108b)。在另外的实施方式中,翅片耦接器组件可以具有用于将翅片耦接至翅片耦接器的耦接元件。这些耦接元件可以形成为翅片和/或翅片耦接器中的任一或两个的部件,或者整个翅片耦接器组件可以被模制。耦接元件的示例可以包括凹槽、突片、销、螺纹制品、与铜焊、焊料或焊接件一起使用的段、紧固件、粘合剂和/或类似物。
173.基座106是翅片传感器102的与翅片耦接的基座。基座106可以限制翅片108a和108b的运动。在实施方式中,基座106具有孔,翅片108a和108b通过这些孔定位,其中翅片108a和108b在基座106的上方153侧和下方155侧上具有元件。
174.在实施方式中,基座106与管道共形,使得基座106用作管道的元件,其中基座106的一侧(在所示实施方式中可能是下方155侧)暴露于操作期间管道110中流动的流体。
175.在实施方式中,基座106可以是或具有板。在实施方式中,该板可以是厚度(或硬度)小于或大于限定管道110的壁的材料的厚度的板。在实施方式中,板可以在板的某些部分较厚,而在其他部分较薄。例如,板的中心可以比板耦接至管道的区域薄,板相对于横轴131的中间可以比板的在横轴131上与管道110相邻的边缘薄,板相对于横轴131的中间可以比板的在横轴131上与管道110相邻的边缘厚,板的厚度可以具有从板的至少在横轴131上与管道相邻的边缘到板在横轴131上的中间连续增加或减少中的一种的等级等。在实施方式中,可以使材料变化而不是使板的厚度变化,这使得板的较软区域和较硬区域成为可能。
所公开的板中关于厚度和薄度的任何关系都分别相对于硬度和柔软度(可能通过使材料变化)进行考虑。板中变化的厚度(或柔软度)可以允许力在纵轴151上更好的净抵消。
176.基座耦接器116是将基座106耦接至使用翅片传感器102的环境的元件。例如,基座耦接器116可以用于将翅片传感器102的基座106耦接至测量流量的位置(例如管道110)。基座耦接器116可以沿着基座106的周边将基座106耦接至管道。基座106可以以本领域已知的任何方式——例如,通过焊接、铜焊、粘合接合或机械配合中的一种或多种——耦接至基座耦接器116。在实施方式中,基座106可以与基座耦接器116形成为整体部件。
177.平衡肋118是在基座106的某些位置部分地限制基座106的挠曲的元件。平衡肋118可以是长形构件。平衡肋118可以由足够坚硬以限制移动诸如振动和/或振荡移动的材料构成。平衡肋118可以帮助消除翅片传感器102在纵轴151上相对于管道110的净运动。平衡肋118可以耦接至基座106、管道110和基座耦接器116中的一个或更多个。在实施方式中,平衡肋118被直接耦接至翅片108a和108b中的至少一个,但在其他实施方式中,平衡肋118可以不耦接至翅片108a和108b。在各种实施方式中,平衡肋118可以在沿着基座106的多个位置处——例如,沿着基座的至少包括基座106的中心的位置、沿着基座106的表示基座106在横轴131上的中间沿着流动轴线141的一部分的部分的位置等——耦接至基座106。在实施方式中,平衡肋118可以跨基座106的长度延伸或基本上跨基座106的长度延伸,基座106的长度可能是基座106的整个长度或基座106的不受基座耦接器116限制的长度。基座耦接器116可以在沿着横轴131与翅片突出穿过基座106的部分等距的位置处耦接至基板。通过或许将平衡肋118沿着横轴131与突出部等距地定位在翅片突出部之间,平衡肋118可以迫使翅片沿着在基座106的边缘处或基座106的边缘处的点处或基本上在基座106的边缘处的点附近的旋转点——其中基座106不受限制——旋转。这可以迫使翅片不具有净纵轴151运动,并且因此不具有周围结构的反作用运动。
178.在实施方式中,如果平衡肋118沿着平衡肋118的最长长度关于中心线198对称,则平衡肋118可以具有代表该长度的中心的中心线198。尽管在图1中描绘为表面上可见的虚线,但是中心线在平衡肋118的内部,中心线可能在由横轴131与纵轴151的平面限定的每个截面的质心处。在实施方式中,平衡肋118可以被耦接至翅片传感器102,使得中心线198平行于或基本平行于流动轴线141。在实施方式中,平衡肋118可以沿着流动轴线141在中心线198周围具有均匀的厚度。在另一实施方式中,平衡肋118可以沿着流动轴线141在中心线198周围具有变化的厚度和/或沿着流动轴线141本身具有变化的在横轴131上的厚度。例如,在实施方式中,平衡肋关于中心线198的至少一个末端196在横轴131上的厚度可以大于平衡肋关于中心线198的中间部分197在横轴131上的厚度。在另一实施方式中,平衡肋关于中心线198的至少一个末端196在横轴131上的厚度可以小于平衡肋关于中心线198的中间部分197在横轴131上的厚度。
179.考虑了其中形成了平衡基座组件的实施方式。平衡基座组件可以至少包括基座106和平衡肋118。在各种实施方式中,平衡基座组件还可以包括翅片108a和108b。此外,基座106可以被配置为如图3所示以及说明书中通常所描述的变化的基座306。在实施方式中,该平衡基座组件可以是翅片传感器102的部件。
180.换能器104a至104c是驱动和/或测量翅片108a和108b的运动的元件。虽然图中示出了三个换能器,但是可以使用任何数目的换能器。在图1所示的实施方式中,上游换能器
104a是测量第一翅片108a与第二翅片108b之间的相对运动的上游振荡的感测换能器。在图1所示的实施方式中,驱动换能器104b是充当驱动器并且使第一翅片108a的位于中间的突出部和/或突出部114a的段或突出部114a的段以及第二翅片108b的位于中间的突出部114b或突出部114b的段振动的换能器,中间位置是翅片沿着流动轴线141的中间位置。在其他实施方式中,用作驱动器的驱动换能器104b可以驱动基座106,或者可以驱动翅片108a和108b中的更少或更多的翅片。在另一实施方式中,驱动换能器104b可以位于基座106的内部,并且使翅片108a和108b中至少之一和/或基座106中的一个或更多个振动。在图1所示的实施方式中,下游换能器104c是测量第一翅片108a与第二翅片108b之间的相对运动的下游振荡的感测换能器。可以测量上游振荡与下游振荡之间的相位差或时间延迟,以便产生流过翅片和/或围绕翅片流动的流体的质量流率。在另一实施方式中,代替或除了上游或下游测量的振动响应,可以使用来自驱动换能器104b的命令信号来确定相位差。换能器104a至104c也可以用于驱动和进行可以与已知技术一起使用以确定密度和/或粘度的测量。将这些测量进行结合可以产生体积流率。这些测定的方法在本领域中被熟知。
181.在实施方式中,换能器104a至104c可以被耦接至翅片突出部114a和114b。翅片突出部114a和114b可以具有用于耦接换能器的不同段。例如,在实施方式中,114a和114b中的每一个可以具有三个段,这些段可能具有在翅片突出部114a与114b之间彼此相对的互补面。换能器104a至104c中的每一个可以耦接至翅片突出部114a和114b的对应段之一(对应段可能在横轴131上彼此面对)。在该实施方式中,三个换能器104a至104c可以在流动轴线141上彼此对齐(至少当翅片传感器102不操作时)。在该实施方式中,换能器104a至104c可以在位于基座106的如下侧上的定位中耦接至翅片108a和108b,该侧与基座106的具有翅片108a和108b被浸入的部分的一侧相对。
182.在各种实施方式中,翅片耦接器120a和/或120b可以将浸入侧342或外侧344上的翅片108a和/或108b进行耦接。例如,在实施方式中,其中翅片耦接器通过将翅片突出部114a和114b进行耦接——例如,通过将代表翅片突出部114a和114b的段进行耦接——而将外侧上的翅片108a和108b进行耦接。翅片耦接器120a和/或120b可以在翅片108a和/或108b上耦接换能器104a至104c中的一个或更多个换能器的区域的下方155和/或上方153的定位处耦接至翅片。在实施方式中,翅片耦接器120a和/或120b在比翅片108a和/或108b上将换能器104a至104c进行耦接的位置更靠近基座106的位置处耦接至基座106的外侧344上的翅片。在实施方式中,翅片耦接器120a和/或120b在与距基座106相比更靠近翅片108a和/或108b上换能器104a至104c被耦接的位置的定位处耦接至基座106的外侧344上的翅片。在翅片耦接器120a和/或120b被耦接至基座106的外侧344上的翅片108a和/或108b的实施方式中,可以理解的是,翅片耦接器120a和/或120b可以在流体流的外部,并且可以降低翅片耦接器120a和/或120b影响流动轮廓和/或易受侵蚀和/或腐蚀的可能性。在翅片耦接器120a和/或120b被耦接至基座106的外侧344上的翅片108a和/或108b的实施方式中,翅片耦接器120a和/或120b仍可以引起模式分隔和/或仍可以引起oop模式中的更多卷曲。
183.仪表电子设备112是根据流量测量来确定流动特性的电子逻辑电路集。仪表电子设备112在图1中没有示出,但是仪表电子设备的配置和耦接方法在本领域中熟知。仪表电子设备112可以具有表示处理元件的逻辑电路、表示存储器的逻辑电路、用于发送和接收数据的逻辑电路以及耦接至传感器、驱动器、计算装置、其他仪表电子设备112等的通信耦合
器。仪表电子设备112可以通过处理器执行存储在存储器中的命令以发送驱动信号、接收传感器数据(例如来自诸如上游换能器104a和下游换能器104c的感测换能器)、确定流动特征、和/或将原始数据或确定的数据发送到外部计算装置或传感器等。仪表电子设备112可以用于确定和/或发送代表例如质量流率、密度、体积流率等的数据。仪表电子设备112可以被配置成使用驱动换能器104b以不同的频率、相位和/或不同的模式驱动或发送驱动翅片108a和108b的指令。在实施方式中,仪表电子设备112可以耦接至基座106或翅片108a和108b,并且可能耦接在基座106的外侧344上。在另一实施方式中,仪表电子设备112可以是翅片传感器102外部的装置。仪表电子设备112可以是图4的计算机系统400的实施方式。
184.在实施方式中,电子元件中的一个、任意组合或全部可以在流体流的外部和/或可以在基座的外部。电子元件可以包括换能器104a至104c和/或仪表电子设备112中的一个、任意组合或全部。
185.流动轴线141是管道中流动流体的预期流动的总体方向,流动轴线141正交于横轴131和纵轴151。在直管道中,流动轴线可以由管道内部沿着代表流体流动的线的中心来限定。上游方向143被定义为流动流体从其开始沿着流动轴线141流动的方向上游。下游方向145被定义为流动流体沿着流动轴线141流向的方向下游。
186.纵轴151是如下线,其在管道被耦接的情况下将管道110的内部截面(具有与整个管道相同的内部半径的截面)的中心点和基座106平分,纵轴151正交于流动轴线141和横轴131。上方方向153被定义为沿着纵轴151从管道110的中心到基座106的方向。下方方向155被定义为沿着纵轴151从基座106到管道110的中心的方向。
187.横轴131是被定义为平行或基本平行于基座106(如果基座弯曲,则横轴可以平行于表示基座106距管道110的中心的平均距离的线)并正交于流体流的轴线,横轴131正交于流动轴线141和纵轴151。第一方向133和第二方向135是沿着横轴131的相反方向。在所示实施方式中,第一方向133可以是在从面向下游方向145的视角观察管道110的由纵轴151与横轴131限定的截面时的到管道110的左边的方向。虽然方向和参考轴线看起来与翅片传感器102和通过其的流有关,但是应当理解,翅片传感器仪表的特定元件的公开实施方式在相对于方向和参考轴线进行描述时可以被认为是具有如下方向和参考轴线的独立元件,所述方向和参考轴线总体上仅用于展示与翅片传感器102和通过其中的流隔离的那些元件的相对定位、耦接、放置和配置。例如,如果平衡肋118的厚度沿着流动轴线变化,则该变化通常可能仅与图中的平衡肋118本身有关,而与流或流量传感器102无关。此外,应当理解,所公开的翅片传感器102及其元件的实施方式主要涉及如下这些参考:这些参考表示翅片传感器102没有经历流时——例如在制造或安装时——的相对定位、耦接、放置和配置。
188.图2a至图2c示出了翅片耦接器组件200a至200c的实施方式的透视图。翅片耦接器组件200a至200c可以是图1的描述中公开的翅片耦接器组件的实施方式。应当理解,所示图像可能不按比例,并且考虑了具有不同的相对尺寸的实施方式。为了清楚起见,对于图2a至图2c的特定透视图,示出了具有参考方向和轴线的参考。
189.图2a示出了具有棒形翅片耦接器220a的翅片耦接器组件200a的实施方式的透视图。棒形翅片耦接器220a可以是翅片耦接器(120a和120b)的实施方式。出于本说明书的目的,翅片耦接器组件是其中至少一个翅片(108a和/或108b)被耦接至至少一个翅片耦接器(120a和/或120b)的组件。棒形翅片耦接器220a可以是翅片耦接器120a或120b的实施方式。
190.图2b示出了具有带形翅片耦接器220b的翅片耦接器组件200b的实施方式的透视图。带形翅片耦接器220b可以是翅片耦接器120a和/或120b的实施方式。在可替选实施方式中,带的平坦部分例如在管道中没有流时可以平行于由横轴131与流动轴线141限定的平面、可以平行于由纵轴151与横轴131限定的平面或者可以具有以螺旋方式扭曲的部分。在另一实施方式中,带形翅片耦接器220b可以具有至少一个锥形端。例如,带形翅片耦接器220b可以是锥形的,使得带形翅片耦接器220b的上游143端和下游145端中的一个或更多个在由纵轴151与横轴131限定的平面中的截面面积小于带形翅片耦接器220b的沿着流动轴线141的更中心的位置在由纵轴151与横轴131限定的平面中的截面面积。例如,带形翅片耦接器220b在由纵轴151与流动轴线141限定的平面中的截面在纵轴151上在截面的上游143端和下游145端中的一个或更多个处可以比截面在流动轴线141上的至少一个更中心部分更窄。
191.图2c示出了具有撑杆形状的翅片耦接器220c的翅片耦接器组件200c的实施方式的透视图。撑杆形状的翅片耦接器220c可以是翅片耦接器120a或120b的实施方式。撑杆形状的翅片耦接器220c的曲线204c(未示出)可以使得撑杆形状的翅片耦接器220c被耦接在翅片108a和108b的相应面的不同定位或相同定位之间。例如,撑杆形状的翅片耦接器220c可以是以下情况中的一种或更多种:耦接至第一翅片108a上的如下定位,该定位在第二翅片108b的相应面上同一撑杆形状的翅片耦接器220c可以耦接至的定位的上方153;耦接至第一翅片108a上的如下定位,该定位在第二翅片108b的相应面上同一撑杆形状的翅片耦接器220c可以耦接至的定位的上游143;等。
192.在图2a至图2c所示的实施方式中,应当理解,无论形状或构造如何,翅片耦接器120a和/或120b中的任何一个都可以以本说明书中公开的任何定位或方式耦接至翅片108a和/或108b中的每一个。
193.图3是具有翅片传感器302的流量传感器系统300的实施方式的截面视图,该翅片传感器具有平衡基座组件中的变化的基座306。截面视图的截面是由纵轴151与横轴131限定的平面中的截面。流量传感器系统300可以具有翅片传感器302,该翅片传感器具有变化的基座306、第一翅片308a、第二翅片308b、浸入侧342以及外侧344。流量传感器系统300、翅片传感器302、变化的基座306、第一翅片308a和第二翅片308b可以分别是来自图1的翅片传感器系统100、翅片传感器102、基座106、第一翅片108a和第二翅片108b的实施方式。变化的基座306可以具有第一较硬部分310、第二较硬部分312和较软部分314。参考方向和轴线对应于图3的视图示出。应当理解,所示图像可能不按比例,并且考虑了具有不同的相对尺寸的实施方式。
194.在所示实施方式中,较软的部分314位于变化的基座306的中间(变化的基座306在横轴131上的中间),以及变化的基座306的第一较硬部分310和第二较硬部分312位于变化的基座306的侧部,所述侧部靠近变化的基座306被耦接至管道的地方。可以理解的是,在各种实施方式中,较软部分314与较硬部分310和312之间的过渡可以在从变化的基座306的中间到变化的基座306的第一侧和第二侧中的每一个上的边缘中的每个边缘的硬度增加方面是平滑的,或者该过渡可以随着从变化的基座306的中间到变化的基座的第一侧和第二侧中的每一个上的边缘中的每个边缘的块的硬度增加而逐步发生。在实施方式中,可以通过使较软的部分更薄而较硬的部分更厚——可能通过切除基座106的一部分或将基座106形
成为具有变化的厚度的变化的基座306——来促进柔软度和硬度的差异。在另一实施方式中,可以通过沿着横轴131使用不同的材料或合金来改变柔软度和硬度,所述不同的材料或合金在较硬部分310和312中较硬而在较软部分314中较软。平衡肋118可以在变化的基座306的横轴131的中间连接至变化的基座306,平衡肋118的长度沿着或基本上沿着流动轴线141(在该图中表示横轴131和纵轴151的平面中不可见)。
195.如图中所绘,随着平衡肋118耦接至变化的基座306,较软部分314可以代表平衡肋118周围的区域。可以理解,在缺少平衡肋118的情况下,314不一定代表单独的较软部分,如图中所绘(平衡肋118可以在耦接至传感器302时增加刚性)。在实施方式中,变化的基座306的在两个翅片108a与108b之间的部分(沿着横轴131)可以比变化的基座306的在翅片108a和108b中的每一个与变化的基座306的边缘之间的部分(在横轴131上)更软。在实施方式中,较软部分314与较硬部分310和312可以通过将翅片108a和108b中的至少一个耦接成在横轴131上与距平衡肋118相比更靠近变化的基座306的边缘来形成。
196.考虑了其中变化的基座306不具有平衡肋118的实施方式以及其中翅片传感器102在不具有变化的基座306的情况下具有平衡肋118的实施方式。例如,实施方式可以具有隔离特性均匀的基座106,使得厚度和材料一致(由于与环境(诸如管道110)的耦接而在板中具有任意可变性),并且仍然可以具有平衡肋118。在该实施方式中,基座106可以是均匀的薄板。
197.在实施方式中,基座106是相对于两个相对表面的表面区域具有薄的边缘的基本平坦的构件。两个表面中的一个可以被表征为浸入侧342表面,并且与浸入侧342表面相对的侧可以被称为外侧344表面。浸入侧342代表基座106的如下侧:在该侧上,翅片108a和108b的一部分和/或基座106被暴露于待测量的流动流体。外侧344代表基座106的如下侧:翅片突出部114a和114b可以位于该侧上并且可能耦接至换能器。
198.在实施方式中,翅片突出部114a和114b可以具有段,当组装翅片传感器302时,所述段可能各自通过基座106中的孔突出。在实施方式中,换能器104a至104c可以耦接至翅片突出部114a和114b。翅片突出部114a和114b可以具有用于将换能器进行耦接的不同的段。例如,在实施方式中,114a和114b中的每一个可以具有三个段,所述段可能具有在翅片突出部114a与114b之间彼此相对的互补面。换能器104a至104c中的每一个可以耦接至翅片突出部114a和114b的对应的段中的一个(对应的段可能在横轴131上彼此面对)。在该实施方式中,三个换能器104a至104c可以在流动轴线141上彼此对齐(至少当翅片传感器102不操作时)。在该实施方式中,换能器104a至104c可以在位于基座106的外侧344上的定位处耦接至翅片108a和108b。
199.图4示出了计算机系统400的实施方式的框图。在实施方式中,计算机系统400可以是仪表电子设备,例如仪表电子设备112。在各种实施方式中,计算机系统400可以由专用集成电路构成,或者可以具有分立的处理器原件和存储器元件,该处理器元件用于处理来自存储器元件的命令并将数据存储在存储器元件上。计算机系统400可以是隔离的物理系统、虚拟机和/或可以建立在云计算环境中。
200.计算机系统可以具有处理器410、存储器420、输入/输出430和通信耦合器440。存储器420可以存储和/或可以具有代表例如驱动模块422、信号模块424和处理模块426的集成电路。在各种实施方式中,计算机系统400可以具有集成到所述元件中或者除了所述计算
机元件之外或者与所述计算机元件通信的其他计算机元件,例如总线、其他通信协议等。
201.处理器410是数据处理元件。处理器410可以是用于进行处理的任何元件,诸如中央处理单元、专用集成电路、其他集成电路、模拟控制器、图形处理单元、现场可编程门阵列、这些或其他公共处理元件的任意组合等。处理器410可以具有存储处理数据的高速缓冲存储器。处理器410可以受益于本说明书中的方法,因为这些方法可以提高计算的解决并减少使用所提出的创造性结构的那些计算的误差。
202.存储器420是用于电子存储装置的装置。存储器420可以是任何非暂态存储介质,并且可以包括以下项中的一项、一些项或所有项:硬盘驱动器、固态驱动器、易失性存储器、集成电路、现场可编程门阵列、随机存取存储器、只读存储器、动态随机存取存储器、可擦除可编程只读存储器、电可擦除可编程只读存储器、高速缓冲存储器等。处理器410可以执行来自存储器420的命令并利用存储在存储器420中的数据。
203.计算机系统400可以被配置成存储要由驱动模块422、信号模块424和/或处理模块426使用的任何数据,并且可以在存储器420中存储表示由驱动模块422、信号模块424和/或处理模块426接收或使用的任何参数的任何时间量的历史数据。计算机系统400还可以在存储器420中存储表示任何中间体的确定的任何数据,所述任何数据可能带有表示何时获取或确定数据的时间戳。虽然驱动模块422、信号模块424和处理模块426被示出为三个独立且分立的模块,但是本说明书考虑了协同工作以实现本说明书中表达的方法的任意数目(甚至是指定的一个或三个)和各种各样的模块。
204.驱动模块422是将驱动器信号发送至换能器(例如,图1的驱动换能器104b)以使传感器组件的元件振动的模块。驱动器模块422可以被配置为发送表示以各种不同的模式进行驱动的命令的数据。例如,驱动模块422可以被配置成发送表示以ip模式和/或oop模式进行驱动的命令的数据。
205.信号模块424是接收传感器数据(例如,代表相位差、时间延迟和/或频率响应的数据)的模块。在翅片传感器102中,信号模块424可以从上游换能器104a和下游换能器104c接收频率数据。确定由上游换能器104a和下游换能器104c的频率数据表示的频率之间的相位差或时间延迟。
206.处理模块426是如下模块,其确定翅片传感器102的行为,以及/或者输出与翅片传感器102相关的数据。处理模块426可以根据由信号模块424接收的数据来确定流动特征。例如,处理模块426可以使用相位差或时间延迟数据来使用本领域已知的方法计算流动流体质量流率。在实施方式中,处理模块426可以使用来自驱动模块422的驱动信号作为从中得出时间延迟或相位差的信号(当与另一换能器信号比较时)。处理模块426还可以根据由信号模块424接收的频率数据得出流动流体密度。处理模块426还可以根据由信号模块424接收的频率和/或相位数据得出流动流体粘度。
207.处理模块426还可以被配置成:确定对驱动器进行驱动的模式和/或频率,可能通过驱动闭合或开放的反馈回路来实现期望的频率或相位差中的一个或更多个。在确定了表示待驱动的驱动模式的数据命令后,处理模块426可以将该命令发送至驱动模块422以发送对驱动电路进行驱动(例如对驱动换能器104b进行驱动)的命令。
208.驱动模块422、信号模块424和处理模块426的能力相对于所呈现的流程图来考虑,并且反映了所呈现的流程图中执行的方法。本说明书中的所有方法相对于每个流程图和流
程图描述来考虑,并且出于遵循本说明书的任何方法权利要求的目的,驱动模块422、信号模块424和处理模块426的所有方法和能力按照所呈现的步骤的顺序以及在本说明书的上下文中对本领域普通技术人员有意义的任何其他顺序来考虑。
209.输入/输出430是用于将计算机系统400通信地耦接至外部元件的装置。输入/输出430能够使用已知的技术(例如,通用串行总线、prolink、串行通信、串行高级技术附属装置等)将计算机系统400连接至外部元件。输入/输出430可以具有通信耦合器440。通信耦合器440用于将计算机系统400与计算机系统400外部的部件——例如与外部计算装置、传感器、换能器(例如,换能器104a至104c)、其他传感器组件等——进行耦合。
210.流程图
211.图5至图9示出了用于制造和使用翅片耦接器组件、平衡基座组件以及组合的翅片耦接器和平衡基座组件的实施方式的方法的实施方式的流程图。流程图中公开的方法是不详尽的,并且仅展示了步骤和顺序的潜在实施方式。这些方法必须在整个说明书的上下文——包括图1至图4的描述中公开的元件,包括例如基座106(例如,变化的基座306)、翅片108a和108b、平衡肋118以及翅片耦接器120a和120b——中解释。
212.图5示出了使用翅片传感器102的翅片耦接器组件的方法500的实施方式的流程图。方法500的方法步骤使用包括对其他附图和其他附图的描述中呈现的元件的引用的实施方式来呈现。在其他附图和其他附图的描述中公开的这些元件的所有能力、构造、相对耦接和定位出于执行这些步骤而被考虑。
213.步骤502通过处理模块426确定表示要由驱动换能器104b进行驱动的第一振动的数据。在实施方式中,由驱动换能器104b驱动的第一驱动可以是ip模式和oop模式中的一种或更多种。在实施方式中,异相模式是翅片108a和108b的振动的频率之间间隔180
°
的模式。处理模块426本身可以将表示第一振动的数据发送至驱动器(例如驱动换能器104b),或者可以经由驱动模块422进行发送。
214.步骤504由驱动换能器104b基于表示待驱动的第一振动的数据进行振动。
215.步骤506通过将第一翅片108a耦接至第二翅片108b的至少一个翅片耦接器120a和/或120b至少部分地限制第一翅片108a相对于第二翅片108b的运动。在实施方式中,至少部分地限制可以限制相对于第二翅片108b的自由边缘199的运动的第一翅片108a的自由边缘199的运动。在实施方式中,至少部分地限制包括限制第一翅片108a在至少一个翅片耦接器120a和/或120b被耦接至第一翅片的任何位置处相对于第二翅片108b的运动的运动。在实施方式中,至少一个翅片耦接器120a和/或120b没有直接限制基座106的任何元件的移动,至少一个翅片耦接器120a和/或120b没有耦接至基座106或作为基座106的元件。在实施方式中,至少一个翅片耦接器120a和/或120b没有直接限制换能器104a至104c的任何元件的移动,至少一个翅片耦接器120a和/或120b没有耦接至换能器104a至104c或作为换能器104a至104c的元件。翅片108a和108b以及翅片耦接器120a和120b的所有耦接方法、构造和替选布置都被考虑用于该步骤。
216.步骤508可选地通过信号模块424或处理模块426接收表示至少一个传感器信号的数据。在信号模块424接收表示至少一个传感器信号的数据的实施方式中,信号模块424可以将该信息或从表示来自信号模块的至少一个信号的数据得出的经处理的输出传送至处理模块426。
217.步骤510可选地通过处理模块426确定流动流体特性,例如质量流率和/或密度。
218.在实施方式中,图5所示的方法的步骤中的每个步骤是不同的步骤。在另一实施方式中,尽管在图5中被描绘为不同的步骤,但是步骤502至512可以不是不同的步骤。在其他实施方式中,图5所示的方法可以不具有以上步骤中的所有步骤和/或可以具有除了以上列出的步骤之外或代替以上列出的步骤的其他步骤。图5所示的方法的步骤可以以另外的顺序执行。上面作为图5所示的方法的一部分列出的步骤的子集可以用来形成它们自己的方法。方法500的步骤可以以任何组合和顺序重复任何次数,例如,连续循环以便保持监视。
219.图6示出了使用翅片传感器102的平衡基座组件的方法600的实施方式的流程图。方法600的方法步骤使用包括对其他附图和其他附图的描述中呈现的元件的引用的实施方式来呈现。在其他附图和其他附图的描述中公开的这些元件的所有能力、构造、相对耦接和定位出于执行这些步骤的目的被考虑。
220.步骤602通过驱动换能器104b驱动翅片108a和108b的运动。
221.步骤604通过平衡肋118限制基座106响应于驱动的运动。在实施方式中,平衡肋118可以限制基座106沿着基座106的中间或基本上中间的部分的运动,该中间被定义为横轴131的中间。步骤604可以导致翅片108a和108b的如下运动:在从管道的中心通过传感器组件的中间的方向上不生成净运动,从而提供平衡并且不相对于翅片传感器102所耦接的支撑结构移动传感器组件。在实施方式中,这可以不提供翅片108a和/或108b和/或翅片传感器102在从管道的中心穿过基座106的中间的方向上(可能被定义为沿着纵轴151)的净运动。可以理解,在一些实施方式中,翅片传感器102的翅片108a和108b可以围绕翅片108a和108b的相应中心点旋转。在实施方式中,平衡肋118至少部分地限制基座106沿着基座106的中间部分在纵轴151上的运动,该中间部分是由横轴131的中间限定的部分。在实施方式中,平衡肋118至少部分地在横轴131上在基座106上第一翅片108a耦接或将要耦接的定位与基座106上第二翅片108b耦接或将要耦接的不同定位之间的定位处限制基座106。在实施方式中,平衡肋118可以至少部分地限制基座106在在横轴131上与第一翅片108a的定位和第二翅片108b的不同定位等距的定位处的运动。在实施方式中,平衡肋118可以至少部分地限制基座106至少沿着基座106的平行于流动轴线141的线性部分的运动。在实施方式中,平衡肋118可以至少部分地限制基座106的运动,使得基座106的下游145端和基座106的上游143端中的一个或更多个的移动被限制少于基座106的中间,基座106的中间是基座106在流动轴线141上的中间。可替选地,平衡肋118可以至少部分地限制基座106的运动,使得基座106的下游145端和基座106的上游143端中的一个或更多个的移动被限制多于基座106的中间,基座106的中间是基座106在流动轴线141上的中间。
222.在实施方式中,图6所示的方法中的每个步骤是不同的步骤。在另一实施方式中,尽管在图6中被描绘为不同的步骤,但是步骤602至604可以不是不同的步骤。在其他实施方式中,图6所示的方法可以不具有以上步骤中的所有步骤和/或可以具有除了以上列出的步骤之外或代替以上列出的步骤的其他步骤。图6所示的方法的步骤可以以另外的顺序执行。上面作为图6所示的方法的一部分列出的步骤的子集可以用来形成它们自己的方法。方法600的步骤可以以任何组合和顺序重复任何次数,例如,可以连续循环以便保持监视。
223.图7示出了制造翅片传感器102的翅片耦接器组件的方法700的实施方式的流程图。方法700的方法步骤使用包括对其他附图和其他附图的描述中呈现的元件的引用的实
施方式来呈现。在其他附图和其他附图的描述中公开的这些元件的所有能力、构造、相对耦接和定位出于执行这些步骤的目的被考虑。在实施方式中,翅片耦接器组件可以与基座106(例如,变化的基座306)和/或平衡肋118结合,以形成经结合的平衡基座和翅片耦接器组件。在实施方式中,翅片耦接器组件可以是翅片传感器102的部件。
224.步骤702可选地形成第一翅片108a和第二翅片108b。用于形成这些部件的制造方法可以是本领域已知的任何合适的制造技术,例如模制、挤压和其他方法和/或这些方法的任意组合。翅片耦接器可以由例如金属或复合材料形成,并且可以通过例如添加(3d打印)制造、由实心块加工、零件加工以及使用紧固件、粘合剂、焊件、铜焊等中的任何一种或任何组合进行组装来形成。
225.步骤704形成至少一个翅片耦接器(例如,第一翅片耦接器120a和第二翅片耦接器120b)。用于制造诸如翅片耦接器的元件的制造方法——例如模制、挤压和其他方法——在本领域中被熟知。翅片耦接器可以由例如金属、塑料或其他复合材料形成。至少一个翅片耦接器可以以多种形状——例如以棒、带或撑杆——形成。在实施方式中,至少一个翅片耦接器可以与翅片108a和108b形成为单件,从而不需要形成翅片108a和108b的单独步骤(如步骤702中)和/或将至少一个翅片耦接器耦接至翅片108a和108b的单独步骤。在实施方式中,至少一个翅片耦接器可以形成为具有一个或更多个耦接元件,所述一个或更多个耦接元件被配置成更容易和/或更有效地将至少一个翅片耦接器耦接至翅片108a和108b例如至少一个翅片耦接器的一个或两个末端。在另一实施方式中,翅片108a和108b中的一个或更多个可以形成为具有耦接元件,以更容易和/或更有效地将至少一个翅片耦接器耦接至翅片108a和108b。在又一实施方式中,至少一个翅片耦接器和翅片108a和108b都可以各自具有相应的或互补的耦接元件,以将至少一个翅片耦接器耦接至翅片108a和108b。在实施方式中,至少一个翅片耦接器可以是两个、三个、四个、五个、六个或任何其他数目的翅片耦接器。在实施方式中,至少一个翅片108a和/或108b和至少一个翅片耦接器120a和/或120b中的一个或更多个可以形成为具有耦接元件,该耦接元件被配置成促进至少一个翅片108a和/或108b与至少一个翅片耦接器120a和/或120b之间的耦接。
226.步骤706将至少一个翅片耦接器耦接至第一翅片108a和第二翅片108b。在翅片108a和108b中的一个或更多个和至少一个翅片耦接器具有耦接元件的实施方式中,至少一个翅片耦接器和翅片108a和108b可以在耦接元件处和/或通过耦接元件耦接。考虑了任何耦接的方法,例如,焊接、铜焊、3d打印、焊合、粘合剂粘合、塑料模制或熔化、互补的物理或机械连接器(例如螺钉)、安装在凹槽中和/或类似方法。在实施方式中,翅片耦接器120a在如下定位处耦接至翅片108a:与翅片108a的被耦接至或将耦接至基座106的边缘相比,该定位更靠近翅片108a的自由边缘199。在实施方式中,两个翅片耦接器120a和120b被耦接至翅片108a和108b。在该实施方式中,第一翅片耦接器120a可以被耦接在如下至少一个定位处:该至少一个定位作为或将作为可以耦接第二翅片耦接器120b的至少一个定位沿着流动轴线141的不同点。
227.步骤708可选地将仪表电子设备112配置成存储和/或执行驱动模块422、信号模块424和/或处理模块426中的一个或更多个。
228.步骤710可选地将翅片108a和108b耦接至基座106。在实施方式中,翅片108a和108b穿过基座106中的孔突出,使得翅片108a和108b具有被构造成浸入在流体流中的浸入
部分以及从基座106的与浸入部分相对的一侧突出的翅片突出部114a和114b。
229.在实施方式中,图7所示的方法的步骤中的每个步骤是不同的步骤。在另一实施方式中,尽管在图7中被描绘为不同的步骤,但是步骤702至710可以不是不同的步骤。在其他实施方式中,图7所示的方法可以不具有以上步骤中的所有步骤和/或可以具有除了以上列出的步骤之外或代替以上列出的步骤的其他步骤。图7所示的方法的步骤可以以另外的顺序执行。上面作为图7所示的方法的一部分列出的步骤的子集可以用来形成它们自己的方法。方法700的步骤可以以任何组合和顺序重复任何次数,例如可以连续循环以便保持监视。
230.图8示出了制造翅片传感器102的平衡基座组件的方法800的实施方式的流程图。方法800的方法步骤使用包括对其他附图和其他附图的描述中呈现的元件的引用的实施方式来呈现。在其他附图和其他附图的描述中公开的这些元件的所有能力、构造、相对耦接和定位出于执行这些步骤的目的被考虑。在实施方式中,平衡基座组件可以被制造为具有一个或更多个翅片耦接器120a和/或120b,以便制成组合的平衡基座和翅片耦接器组件。在实施方式中,平衡基座组件可以是翅片传感器102的部件。
231.步骤802可选地形成换能器104a至104c、第一翅片108a和第二翅片108b、仪表电子设备112、平衡肋118、基座耦接器116以及第一翅片耦接器120a和第二翅片耦接器120b。用于形成这些部件的制造方法在本领域中已经确立,例如,3d打印、模制、耦接单独形成的部件等。
232.步骤804形成至少一个基座106。基座106可以是平坦或基本平坦的构件,该构件相对于其较大表面的面积具有小的厚度。在实施方式中,基座106可以形成为薄的和/或可以形成为具有变化的或均匀的硬度。例如,基座106可以形成为变化的基座306,使得变化的基座306的中间(作为横轴131的中间)的硬度低于(变化的基座306在横轴131上的)边缘的硬度。这种变化可以通过模制使得生成中间(沿着横轴131)比(变化的基座306在横轴131上的)边缘更薄(具有更少的材料)的变化的基座306从而形成基座106来实现。在另一实施方式中,该变化可以通过移除——可能通过切割——基座106的一部分以使基座106成为中间(沿着横轴131)比(变化的基座306在横轴131上的)边缘更薄(具有更少的材料)的变化的基座来实现。在另一实施方式中,基座106可以由沿着横轴131使基座成为变化的基座306的不同的材料构成,从而使得变化的基座306的中间(沿着横轴131)比(变化的基座306在横轴131上的)边缘更软。
233.步骤806形成平衡肋118。平衡肋118可以是长形构件,并且可以使用任何标准的制造方法来制造,并且可以由本领域已知的足以至少在某种程度上限制基座106的运动的任何材料来制造。在实施方式中,如果平衡肋118在至少一个轴线上沿该平衡肋的最长长度对称(例如在横轴131上关于中心线198对称),则平衡肋118可以具有代表该最长长度的中心的中心线198。平衡肋118可以沿着中心线198的长度在中心线198周围具有变化的厚度。例如,在实施方式中,平衡肋118关于中心线198的至少一个末端在横轴131上的厚度可以大于平衡肋关于中心线198的中间部分197在横轴131上的厚度。在另一实施方式中,平衡肋118关于中心线198的至少一个末端在横轴131上的厚度可以小于平衡肋关于中心线198的中间部分197在横轴131上的厚度。
234.步骤808将平衡肋118耦接至基座106。平衡肋118可以在基座在横轴131上的中间
定位处耦接至基座,平衡肋可能具有沿着或基本上沿着流动轴线141的长形部分。在基座106具有耦接至基座106的翅片108a和108b或者将具有耦接至基座106的翅片108a和108b的实施方式中,平衡肋118可以在被耦接的翅片108a与108b之间耦接至基座106,可能沿着横轴131耦接在翅片108a与108b之间,以及也可能沿着横轴131与用于耦接或耦接至第一翅片108a的定位和用于耦接或耦接至第二翅片108b的不同定位等距地进行耦接。当平衡肋118被耦接至基座106(或变化的基座306)时形成的组件可以被认为是翅片传感器102的平衡基座组件。在实施方式中,平衡肋118可以耦接至翅片传感器102,使得中心线198平行于或基本平行于流动轴线141。在实施方式中,平衡肋118可以沿着流动轴线141在中心线198周围具有均匀的厚度。在另一实施方式中,平衡肋118可以在中心线198周围沿着流动轴线141具有变化的在横轴131上的厚度。例如,在实施方式中,平衡肋118关于中心线198的至少一个末端在横轴131上的厚度可以大于平衡肋关于中心线198的中间部分197在横轴131上的厚度。例如,在实施方式中,平衡肋118关于中心线198的至少一个末端在横轴131上的厚度可以小于平衡肋关于中心线198的中间部分197在横轴131上的厚度。
235.步骤810可选地通过将平衡基座组件耦接至翅片108a和108b(可能在基座106上的翅片108a与108b之间具有平衡肋118)、换能器104a至104c、仪表电子设备112、基座耦接器116和/或第一翅片耦接器120a和第二翅片耦接器120b来形成翅片传感器102。在实施方式中,翅片突出部114a和114b可以具有段,当翅片传感器302被组装时,这些段可能各自突出穿过基座106中的孔。在实施方式中,换能器104a至104c可以耦接至翅片突出部114a和114b。翅片突出部114a和114b可以具有用于将换能器进行耦接的不同的段。例如,在实施方式中,翅片突出部114a和114b中的每一个可以具有三个段,这些段可能具有在翅片突出部114a与114b之间彼此相对的互补面。换能器104a至104c中的每一个可以耦接至翅片突出部114a和114b的对应的段之一(对应的段可能在横轴131上彼此面对)。在该实施方式中,三个换能器104a至104c可以在流动轴线141上彼此对齐(至少当翅片传感器102不操作时)。在该实施方式中,换能器104a至104c可以在基座106的一侧上的定位处耦接至翅片108a和108b,所述基座106的一侧与基座106的具有翅片108a和108b被浸入的部分的一侧相对。仪表电子设备112可以耦接至基座106或翅片108a和108b,并且可能耦接在基座106的外侧344上。
236.在实施方式中,图8所示的方法的步骤中的每个步骤是不同的步骤。在另一实施方式中,尽管在图8中被描绘为不同的步骤,但是步骤802至810可以不是不同的步骤。在其他实施方式中,图8所示的方法可以不具有以上步骤中的所有步骤和/或可以具有除了以上列出的步骤之外或代替以上列出的步骤的其他步骤。图8所示的方法的步骤可以以另外的顺序执行。上面作为图8所示的方法的一部分列出的步骤的子集可以用来形成它们自己的方法。方法800的步骤可以以任意组合和顺序重复任意次数,例如,可以连续循环以便保持监视。
237.图9示出了制造翅片传感器102的平衡基座和翅片耦接器组件的方法900的实施方式的流程图。方法900的方法步骤使用包括对其他附图和其他附图的描述中呈现的元件的引用的实施方式来呈现。在其他附图和其他附图的描述中公开的这些元件的所有能力、构造、相对耦接和定位出于执行这些步骤的目的被考虑。在实施方式中,平衡基座组件可以是翅片传感器102的部件。
238.步骤902可选地形成换能器104a至104c、第一翅片108a和第二翅片108b、仪表电子
设备112、基座耦接器116以及第一翅片耦接器120a和第二翅片耦接器120b。用于形成这些部件的制造方法在本领域中已经确立,例如,3d打印、模制、耦接单独形成的部件等。
239.步骤904形成至少一个基座106。基座106可以是平坦或基本平坦的构件,该构件相对于其较大表面的面积具有小的厚度。在实施方式中,基座106可以形成为薄的和/或可以形成为具有变化的或均匀的硬度。例如,基座106可以形成为变化的基座306,使得变化的基座306的中间(作为横轴131的中间)的硬度低于(变化的基座306在横轴131上的)边缘的硬度。这种变化可以通过模制使得生成中间(沿着横轴131)比(变化的基座306在横轴131上的)边缘更薄(具有更少的材料)的变化的基座306从而形成基座106来实现。在另一实施方式中,该变化可以通过移除——可能通过切割——基座106的一部分以使基座106成为中间(沿着横轴131)比(变化的基座306在横轴131上的)边缘更薄(具有更少的材料)的变化的基座来实现。在另一实施方式中,基座106可以由沿着横轴131使基座成为变化的基座306的不同的材料构成,从而使得变化的基座306的中间(沿着横轴131)比(变化的基座306在横轴131上的)边缘更软。
240.步骤906形成平衡肋118。平衡肋118可以是长形构件,并且可以使用任何标准的制造方法来制造,并且可以由本领域已知的足以至少在某种程度上限制基座106的运动的任何材料来制造。在实施方式中,如果平衡肋118在至少一个轴线上沿该平衡肋的最长长度对称(例如,在横轴131上关于中心线198对称),则平衡肋118可以具有代表该最长长度的中心的中心线198。平衡肋118可以沿着中心线198的长度在中心线198周围具有变化的厚度。例如,在实施方式中,平衡肋118关于中心线198的至少一个末端在横轴131上的厚度可以大于平衡肋关于中心线198的中间部分197在横轴131上的厚度。在另一实施方式中,平衡肋118关于中心线198的至少一个末端在横轴131上的厚度可以小于平衡肋关于中心线198的中间部分197在横轴131上的厚度。
241.步骤908将平衡肋118耦接至基座106。平衡肋118可以在基座在横轴131上的中间定位处耦接至基座,该平衡肋可能具有沿着或基本上沿着流动轴线141的长形部分。在基座106具有耦接至基座106的翅片108a和108b或者将具有耦接至基座106的翅片108a和108b的实施方式中,平衡肋118可以在被耦接的翅片108a与108b之间耦接至基座106,可能沿着横轴131耦接在翅片108a与108b之间,以及也可能沿着横轴131与用于耦接或耦接至第一翅片108a的定位和用于耦接或耦接至第二翅片108b的不同定位等距地进行耦接。当平衡肋118被耦接至基座106(或变化的基座306)时形成的组件可以被认为是翅片传感器102的平衡基座组件。在实施方式中,平衡肋118可以耦接至翅片传感器102,使得中心线198平行于或基本平行于流动轴线141。在实施方式中,平衡肋118可以沿着流动轴线141在中心线198周围具有均匀的厚度。在另一实施方式中,平衡肋118可以在中心线198周围沿着流动轴线141具有变化的在横轴131上的厚度。例如,在实施方式中,平衡肋118关于中心线198的至少一个末端在横轴131上的厚度可以大于平衡肋关于中心线198的中间部分197在横轴131上的厚度。例如,在实施方式中,平衡肋118关于中心线198的至少一个末端在横轴131上的厚度可以小于平衡肋关于中心线198的中间部分197在横轴131上的厚度。
242.步骤910形成至少一个翅片耦接器(例如,第一翅片耦接器120a和/或第二翅片耦接器120b)。用于制造诸如翅片耦接器的元件的制造方法——例如模制、挤压和其他方法——在本领域中被熟知。翅片耦接器可以由例如金属或复合材料形成。至少一个翅片耦
接器可以以多种形状——例如以棒、带或撑杆——形成。在实施方式中,至少一个翅片耦接器可以与翅片108a和108b形成为单件,而不需要用于形成翅片108a和108b的单独步骤(如步骤702)和/或用于将至少一个翅片耦接器耦接至翅片108a和108b的单独步骤。在实施方式中,至少一个翅片耦接器可以形成为具有一个或更多个耦接元件,所述一个或更多个耦接元件被配置成更容易和/或更有效地将至少一个翅片耦接器耦接至翅片108a和108b(例如,至少一个翅片耦接器的一个或两个末端)。在另一实施方式中,翅片108a和108b中的一个或更多个可以形成为具有耦接元件,以更容易和/或更有效地将至少一个翅片耦接器耦接至翅片108a和108b。在又一实施方式中,至少一个翅片耦接器和翅片108a和108b都可以各自具有相应的或互补的耦接元件,以将至少一个翅片耦接器耦接至翅片108a和108b。在实施方式中,至少一个翅片耦接器可以是两个、三个、四个、五个、六个或任意其他数目的翅片耦接器。
243.步骤912将至少一个翅片耦接器耦接至第一翅片108a和第二翅片108b。在翅片108a和108b中的一个或更多个和至少一个翅片耦接器具有耦接元件的实施方式中,至少一个翅片耦接器与翅片108a和108b可以在耦接元件处和/或通过耦接元件进行耦接。考虑了任何耦接的方法,例如,焊接、铜焊、焊合、粘合剂粘合、塑料模制或熔化、互补的物理或机械连接器等。
244.步骤914将翅片108a和108b耦接至基座106。翅片108a和108b可以以如下任何方式耦接至基座106:例如,通过模制一起形成、通过粘合剂粘合、焊接或铜焊进行耦接以及本领域中的其他已知的方法。在实施方式中,基座106具有翅片突出部114a和114b可以通过其突出的孔,并且基座106与翅片突出部114a和114b通过标准的耦接方法——诸如粘合剂粘合、焊接和铜焊——建立耦接。
245.步骤916可选地通过将平衡基座组件耦接至翅片108a和108b(可能在基座106上的翅片108a和108b之间具有平衡肋118)、换能器104a至104c、仪表电子设备112和/或基座耦接器116来形成翅片传感器102。在实施方式中,翅片突出部114a和114b可以具有段,当翅片传感器302被组装时,这些段可能各自通过基座106中的孔突出。在实施方式中,换能器104a至104c可以耦接至翅片突出部114a和114b。翅片突出部114a和114b可以具有用于将换能器进行耦接的不同的段。例如,在实施方式中,翅片突出部114a和114b中的每一个可以具有三个段,这些段可能具有在翅片突出部114a与114b之间彼此相对的互补面。换能器104a至104c中的每一个可以耦接至翅片突出部114a和114b的对应的段之一(对应的段可能在横轴131上彼此面对)。在该实施方式中,三个换能器104a至104c可以在流动轴线141上彼此对齐(至少当翅片传感器102不操作时)。在该实施方式中,换能器104a至104c可以在位于基座106的一侧上的定位处耦接至翅片108a和108b,所述基座106的一侧与基座106的具有翅片108a和108b被浸入的部分的一侧相对。
246.说明书考虑了这些步骤的可替选顺序,包括在某些步骤的必要顺序下合理的所有顺序。例如,翅片耦接器120a和120b被耦接至翅片108a和108b的步骤以及翅片108a和108b被耦接至基座106的步骤可以相对于彼此以任何顺序进行。此外,平衡基座组件可以在翅片耦接器组件形成之前、期间或之后形成。
247.在实施方式中,图9所示的方法的步骤中的每个步骤是不同的步骤。在另一实施方式中,尽管在图9中被描绘为不同的步骤,但是步骤902至916可以不是不同的步骤。在其他
实施方式中,图9所示的方法可以不具有以上步骤中的所有步骤和/或可以具有除了以上列出的步骤之外或代替以上列出的步骤的其他步骤。图9所示的方法的步骤可以以另外的顺序执行。上面作为图9所示的方法的一部分列出的步骤的子集可以用来形成它们自己的方法。方法900的步骤可以以任意组合和顺序重复任意次数,例如,可以连续循环以便保持监视。
248.比较
249.图10至图11示出了对申请人在本说明书中呈现的特征的实施方式的某些效果进行解释的比较。
250.图10示出了在同相(ip)模式和异相(oop)模式下驱动的具有和不具有翅片耦接器120a和120b的翅片传感器102的实施方式的比较1000。翅片传感器102a和102b分别是不具有和具有翅片耦接器120a和120b的翅片传感器102的实施方式。比较1000具有第一行1042、第二行1044、第一图像1052、第二图像1054、第三图像1056和第四图像1058。
251.第一行1042是表示不具有翅片耦接器120a和120b的翅片传感器102a的图像的行,第一行1042具有第一图像1052和第二图像1054。第一图像1052示出了不具有翅片耦接器120a和120b的翅片传感器102a的实施方式,该翅片传感器102a以同相模式驱动。第二图像1054示出了以异相模式驱动的翅片传感器102a的实施方式。可以看出,在点1055处,异相模式的翅片显示出极小的卷曲,基本上保持平坦。可以理解,在同相模式与异相模式之间存在极小的频率分离,因为这两者都以相同的力进行驱动,它们的响应频率接近基本相同的值。振动模式之间缺乏分离可能导致驱动模式与自然模式的耦合,并使预期的激励形状不纯,从而可能导致校准和测量误差。
252.第二行1044是表示具有翅片耦接器120a和120b的翅片传感器102b的图像的行,第二行1044具有第三图像1056和第四图像1058。第三图像1056示出了具有翅片耦接器120a和120b的翅片传感器102b的实施方式,该翅片传感器102b以同相模式驱动。第二图像1054示出了以异相模式驱动的具有翅片耦接器120a和120b的翅片传感器102b的实施方式。可以看出,在点1059处,异相模式显示出相当大的卷曲,生成更大的振幅、频率和相位分辨率。这在同相模式与异相模式之间生成相当大的频率分离,因为这两者都以相同的力进行驱动,其中异相模式下的翅片传感器102b生成的频率在该实施方式中比由同相模式生成的频率高20%。同相模式与异相模式之间的这种频率分离至少可以限制同相模式与异相模式之间的耦合,这潜在地允许更好的测量和校准。增加的卷曲可以允许翅片传感器102b更好地将翅片耦接至流动的介质并引起科里奥利响应,这可能类似于典型的科里奥利质量流量计。
253.图11示出了在未变形和变形的定位处具有和不具有平衡肋118的翅片传感器102的实施方式的比较1100。翅片传感器102c和102d分别是具有和不具有平衡肋118的翅片传感器102的实施方式。比较1100具有第一行1142、第二行1144、第一图像1152、第二图像1154、第三图像1156和第四图像1158。
254.第一行1142是表示不具有平衡肋118的翅片传感器102c的图像的行,第一行1142具有第一图像1152和第二图像1154。第一图像1152示出了不具有平衡肋118的翅片传感器102c的实施方式,该翅片传感器102c处于未变形的定位。第二图像1154示出了在变形的定位处不具有平衡肋118的翅片传感器102c的实施方式。可以看出,在点1155a和1155b处,翅片108a和108b的旋转的轴线位于基座106的边缘处。可以理解,所产生的传感器组件的运动
将通过传感器组件在纵轴151的方向上生成净运动,这引起不平衡并使传感器组件相对于翅片传感器102c所耦接的支撑结构移动。
255.第二行1144是表示具有平衡肋118的翅片传感器102d的图像的行,第二行1144具有第三图像1156和第四图像1158。第三图像1156示出了具有平衡肋118的翅片传感器102d的实施方式,翅片传感器102d处于未变形的定位。第四图像1154示出了具有平衡肋118的翅片传感器102d的实施方式,该翅片传感器102d处于变形的定位。可以看出,在点1159a和1159b处,翅片108a和108b的旋转的轴线位于翅片108a和108b与基座106的耦接处。可以理解,所产生的翅片108a和108b的运动将不会通过传感器组件的中间在纵轴151上生成净运动,这提供了平衡并且不会使传感器组件相对于翅片传感器102d所耦接的支撑结构移动。在实施方式中,这可以不提供翅片(或齿)在垂直方向上的净运动。可以理解,在一些实施方式中,翅片传感器102d的翅片108a和108b可以围绕翅片108a和108b的相应中心点旋转(分别在1159a和1159b处)。
256.图12示出了在同相(ip)模式和异相(oop)模式下驱动的在基座106的外侧344上具有和不具有翅片耦接器120a和120b的翅片传感器102的实施方式的比较1200。翅片传感器102e和102f分别是不具有和具有翅片耦接器120a和120b的翅片传感器102的实施方式。比较1200具有第一行1242、第二行1244、第一图像1252、第二图像1254、第三图像1256和第四图像1258。
257.第一行1242是表示不具有翅片耦接器120a和120b的翅片传感器102e的图像的行,第一行1242具有第一图像1252和第二图像1254。第一图像1252示出了不具有翅片耦接器120a和120b的翅片传感器102a的实施方式,该翅片传感器102a以同相模式驱动。第二图像1254示出了以异相模式驱动的翅片传感器102a的实施方式。可以看出,在点1255处,异相模式的翅片显示出极小的卷曲,基本上保持平坦。可以理解,同相模式与异相模式之间存在极小的频率分离,因为这两者都以相同的力进行驱动,它们的响应频率接近基本相同的值。振动模式之间缺乏分离可能导致驱动模式与自然模式的耦合,并使预期的激励形状不纯,从而可能导致校准和测量误差。
258.第二行1244是表示具有翅片耦接器120a和120b的翅片传感器102b的图像的行,第二行1244具有第三图像1256和第四图像1258。第三图像1256示出了具有翅片耦接器120a和120b的翅片传感器102b的实施方式,翅片传感器102b以同相模式进行驱动。第二图像1254示出了以异相模式驱动的具有翅片耦接器120a和120b的翅片传感器102b的实施方式。这在同相模式与异相模式之间生成相当大的频率分离,因为这两者都以相同的力被驱动,其中异相模式下的翅片传感器102b生成的频率在该实施方式中比由同相模式生成的频率高20%。同相模式与异相模式之间的这种频率分离至少可以限制同相模式与异相模式之间的耦合,这潜在地允许更好的测量和校准。增加的卷曲可以允许翅片传感器102b更好地将翅片耦接至流动的介质并引起科里奥利响应,这可能类似于典型的科里奥利质量流量计。
259.上述实施方式的详细描述并不是发明人认为在本说明书的范围内的所有实施方式的详尽描述。实际上,本领域技术人员将认识到,上述实施方式的某些元素可以被不同地组合或消除以创建另外的实施方式,并且这样的另外的实施方式落入本说明书的范围和教导内。对于本领域普通技术人员来说将明显的是,在本说明书的范围和教导内,上述实施方式可以全部或部分地组合以创建另外的实施方式。当使用陈述“和/或”时,应解释成,出于
本说明书的目的,充分考虑和公开应用“和”和“或”中的一个或更多个的实施方式。
260.因此,尽管本文出于说明的目的描述了具体实施方式,但是如相关领域的技术人员将认识到的,各种等同的修改在本说明书的范围内是可行的。本文提供的教导可以应用于用于确定振动元件的振动响应参数的其他方法和设备,而不只是应用于以上描述的和附图所示的实施方式。因此,上述实施方式的范围应当由所附权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1