多转测量系统的制作方法
1.本发明涉及一种测量系统,更具体地,涉及一种能够测量多转旋转的测量系统。
背景技术:
2.现有测量系统用于测量轴的多转旋转,其指示轴的角位置以及轴在给定时间点所经历的转数。这种测量系统例如用在缆线致动位置传感器中,其中,缆线缠绕在轴上,并且轴随着缆线从轴拉出和解绕而旋转。轴的角位置和轴的转数表示在各种应用中为测量线性位置而解绕的缆线的长度。
3.在这样的测量系统中,轴的角位置和轴的转数通常由电位计测量;轴的旋转线性地改变电位计的输出电压。但是,高精度的电位计非常昂贵。此外,电位器由于制造不可靠而极易发生机械故障,从而导致电气问题和相应的不准确测量。
技术实现要素:
4.一种多转测量系统包括多个齿轮、接合多个齿轮的多个小齿轮、分别设置在多个齿轮中的一个上的多个磁体、以及多个磁场传感器。所述小齿轮绕中心轴线的旋转驱动所述多个齿轮的旋转。磁体各自具有磁场,其基于所述多个齿轮中的一个的角位置而变化。磁场传感器各自设置为感测所述多个磁体中的一个的磁场。
附图说明
5.现在将参照附图以举例的方式描述本发明,在附图中:
6.图1是根据实施例的多转测量系统的透视图;
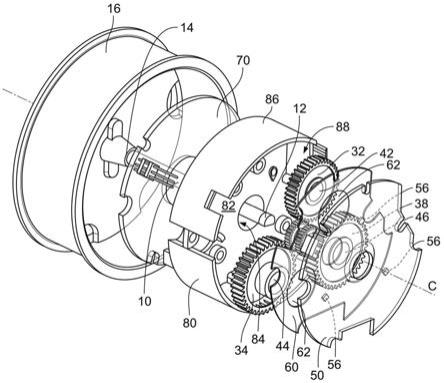
7.图2是多转测量系统的分解透视图,其透明地示出了多转测量系统的传感器板和电磁屏蔽件;
8.图3是多转测量系统的轴、多个小齿轮、多个齿轮和多个磁体的透视图;
9.图4是多转测量系统的小齿轮、齿轮、磁体、传感器板和电磁屏蔽件的一部分的详细侧视图;以及
10.图5是传感器板的透视图。
具体实施方式
11.在下文中将参考附图详细描述本公开的示例性实施例,其中,相同的附图标记指代相同的元件。然而,本公开可以以许多不同的形式来体现,并且不应被解释为限于这里阐述的实施例;相反,提供这些实施例是为了使本公开将本公开的构思传达给本领域技术人员。另外,在下面的详细描述中,出于解释的目的,阐述了许多具体细节以便提供对所公开的实施例的透彻理解。然而,显而易见的是,没有这些具体细节也可以实现一个或多个实施例。
12.图1和图2示出了根据实施例的多转测量系统。如图1和图2所示,测量系统包括轴
10、设置在轴10上且可随轴10旋转的多个小齿轮20、接合所述多个小齿轮20且由小齿轮20的旋转驱动的多个齿轮30、设置在齿轮30上的多个磁体40、以及设置在齿轮30和磁体40附近的传感器板50。
13.如图2和图3所示,轴10沿着中心轴线c在第一端12和第二端14之间延伸。在图1和图2所示的实施例中,第一端12是自由端,第二端14可旋转地固定到线轴16,线轴16围绕轴10的一部分延伸。在该实施例中,本领域普通技术人员已知的缆线、绳索或任何其他长度的材料可以缠绕在线轴16上,而一定长度的材料的解绕使线轴16旋转并使轴10相应地旋转。在另一实施例中,轴10不固定到线轴16;在该实施例中,本领域普通技术人员已知的各种其他元件可以使轴10旋转。
14.如图2-4所示,多个小齿轮20包括第一小齿轮22和第二小齿轮24。第一小齿轮22是圆形构件,其具有围绕第一小齿轮22的外周均匀地设置的多个第一小齿轮齿22t。第二小齿轮24是圆形构件,其具有围绕第二小齿轮24的外周均匀地设置的多个第二小齿轮齿24t。第一小齿轮齿22t的数量不同于第二小齿轮齿24t的数量,且第一小齿轮22的直径不同于第二小齿轮24的直径。在所示的实施例中,第一小齿轮齿22t的数量小于第二小齿轮齿24t的数量,且第一小齿轮22的直径小于第二小齿轮24的直径。在所示的实施例中,第一小齿轮齿22t的数量为十六,且第二小齿轮齿24t的数量为十八。在其他实施例中,第一小齿轮22和第二小齿轮24的特定和相对的齿数和直径可以不同。
15.如图3所示,小齿轮20设置在轴10的第一端12上。第一小齿轮22和第二小齿轮24沿着中心轴线c设置在不同位置。在所示的实施例中,第二小齿轮24设置成比第一小齿轮22更靠近轴10的第二端14。小齿轮20旋转固定到轴10,并且与轴10的旋转相对应地同时绕中心曲线c旋转。
16.如图2和图3所示,多个齿轮30包括第一齿轮32、第二齿轮34和第三齿轮38。如图3所示,第一齿轮32是圆形构件,具有第一齿轮直径方向32d和围绕第一齿轮32的外周均匀地设置的多个第一齿轮齿32t。第一齿轮32绕第一旋转轴线32b旋转。第二齿轮34是圆形构件,具有第二齿轮直径方向34d和绕第二齿轮34的外周均匀地设置的多个第二齿轮齿34t。第二齿轮34绕旋转轴线34b旋转。如图3所示,第二齿轮34具有延伸部36,其位于第二齿轮34的中心处且沿着第二旋转轴线34b从第二齿轮34凸出。第三齿轮38是圆形构件,其具有第三齿轮直径方向38d和绕第三齿轮38的外周均匀地设置的多个第三齿轮齿38t。第三齿轮38绕第三旋转轴线38b旋转。第一旋转轴线32b、第二旋转轴线34b和第三旋转轴线38b彼此平行且平行于中心轴线c。
17.第一齿轮齿32t的数量不同于第二齿轮齿34t的数量,且第一齿轮32的直径不同于第二齿轮34的直径。第二齿轮齿34t的数量等于第三齿轮齿38t的数量,且第二齿轮34的直径等于第三齿轮38的直径。在所示的实施例中,第一齿轮齿32t的数量小于第二齿轮齿34t和第三齿轮齿38t的数量,且第一齿轮32的直径小于第二齿轮34和第三齿轮38的直径。在所示的实施例中,第一齿轮齿32t的数量为四十二,且第二齿轮齿32t和第三齿轮齿38t的数量为四十八。在其他实施例中,第一齿轮32、第二齿轮34和第三齿轮38的特定和相对的齿数和直径可以不同。
18.如图3所示,第一齿轮32和第三齿轮38沿着中心轴线c设置在与第二齿轮34不同的位置;第一齿轮32和第三齿轮38设置为接合第一小齿轮22,且第二齿轮34设置为接合第二
小齿轮24。第一齿轮32和第三齿轮38沿着中心轴线c在相同的位置对齐。第一小齿轮22的旋转驱动第一齿轮32绕第一旋转轴线32b的旋转和第三齿轮38绕第三旋转轴线38b的旋转,且第二小齿轮24的旋转驱动第二齿轮34绕第二旋转轴线34b的旋转。
19.如图2和图3所示,多个磁体40包括设置在第一齿轮32上的第一磁体42、设置在第二齿轮34上的第二磁体44和设置在第三齿轮38上的第三磁体46。如图3所示,第二磁体44设置在第二齿轮34的延伸部36上,使其与第一磁体42和第三磁体46共面。每个磁体40居中地设置在相应的齿轮30的旋转轴线32b、34b、38b上。每个磁体40的磁化方向42m、44m、46m(即,在磁体40的北极和南极之间延伸的方向)在相应的齿轮30的直径方向32d、34d、38d上延伸。磁体40各自随相应的齿轮30旋转。
20.如图1、2、4和5所示,传感器板50是印刷电路板,其具有第一侧52和相反的第二侧54。多个磁场传感器56设置在传感器板50的第一侧52。磁场传感器56的数量对应于设置在齿轮30上的磁体40的数量;在所示的实施例中,存在三个磁场传感器56。在实施例中,每个磁场传感器56是各向异性磁阻(amr)传感器。
21.如图1所示,集成电路58设置在传感器板50的第二侧54。集成电路58通过传感器板50的布线电连接到每个磁场传感器56且能够从每个磁场传感器56接收电信号。集成电路58包括处理器和连接到处理器的存储器。存储器是一种非暂时性计算机可读介质,并且在其上存储算法,该算法可由处理器执行以如下所述基于来自磁场传感器56的输入信号生成输出信号。在所示的实施例中,集成电路58是由ic haus制造的被称为ic-mnf的可商购的专用集成电路(“asic”)。
22.如图1、2和4所示,传感器板50设置在齿轮30附近,传感器板50的第一侧52面向齿轮30和磁体40。每个磁场传感器56沿着相应的磁体40的旋转轴线32b、34b、38b与一个磁体40居中地对齐。
23.在图2和图4所示的实施例中,多转测量系统包括电磁屏蔽件60。如图2所示,电磁屏蔽件60由材料片形成,并且包括延伸穿过电磁屏蔽件60的多个传感器通道62。在实施例中,传感器通道62在材料片中冲出。在所示的实施例中,电磁屏蔽件60由钢材形成。在其他实施例中,电磁屏蔽件60可以由铁材料或本领域普通技术人员已知的能够执行电磁屏蔽的任何其他材料形成。
24.如图2和图4所示,电磁屏蔽件60位于传感器板50的第一侧52,并且布置在齿轮30与传感器板50之间。每个磁场传感器56设置在电磁屏蔽件60的传感器通道62之一中,并被电磁屏蔽件60围绕。如图4所示,每个磁场传感器56从传感器板50的第一侧52凸出大约与电磁屏蔽件60的厚度相同的量。
25.在图1和图2所示的实施例中,多转测量系统包括通信板70。通信板70是电连接到传感器板50的印刷电路板,并适于接收来自集成电路58的输出信号。通信板70具有多种不同类型的电连接端口之一和/或多种不同类型的信号格式之一,其由安装在通信板70上的本领域普通技术人员已知的多个电气部件实现。
26.在图1和图2所示的实施例中,多转测量系统包括壳体80,在壳体80中组装轴10、小齿轮20、齿轮30、磁体40、传感器板50、电磁屏蔽件60和通信板70。如图2所示,壳体80具有基部82、居中地延伸穿过基部82的轴通道84、以及绕中心轴线c从基部82延伸的侧壁86。基部82和侧壁86限定部件接收空间88。
27.如图1和2所示,轴10延伸穿过轴通道84,小齿轮20、齿轮30、磁体40、传感器板50和电磁屏蔽件60设置在所述部件接收空间88内。齿轮30固定至基部82,并且能够相对于壳体80绕它们各自的旋转轴线32b、34b、38b旋转。传感器板50(电磁屏蔽件60设置在传感器板50的第一侧52)设置为封闭部件接收空间88的大部分。在组装状态下,如图4所示,磁场传感器56和电磁屏蔽件60设置为在平行于中心轴线c的方向上以间隔89与齿轮30上的磁体40隔开。通信板70在基座82的与部件接收空间88相背的一侧设置在壳体80内。如图1的实施例所示,多个紧固件90可用于将多转测量系统固定于组装状态。
28.多转测量系统测量轴10绕中心轴线c的转数和轴10绕中心轴线c的角位置,现将更详细地描述。
29.轴10绕中心轴线c的旋转可以由线轴16的旋转驱动,或者可以由外部元件直接驱动。当轴10绕中心轴线c旋转时,小齿轮20同时绕中心轴线c旋转,并驱动齿轮30绕它们各自的旋转轴线32b、34b、38b旋转,如图3所示。由于小齿轮20具有不同数量的齿22t、24t,并且一些齿轮30具有不同数量的齿32t、34t、38t,并且接合不同的小齿轮20,所以齿轮30各自具有不同的齿数比,并且各自具有绕其旋转轴线32b、34b、38b的不同角度位置。小齿轮20的相关的齿22t、24t和齿轮30的齿32t、34t、38t的布置,以及不同的齿轮30与不同的小齿轮20的接合,使得需要较大的轴10的转数才能到达每个齿轮30返回相同起始角位置的位置。
30.每个磁体40具有磁场,该磁场由于相应的齿轮30的旋转而基于相应的齿轮30的角位置而变化。如图2和图4所示,与磁体40对齐的磁场传感器56分别感测多个磁体40之一的磁场。磁场传感器56各自输出传感器信号到集成电路58,该信号表示与磁场传感器56对齐的磁体40的磁场;由磁场传感器56输出的传感器信号由于相应的齿轮30的旋转而随每个磁体40的磁场变化。磁场传感器56在电磁屏蔽件60的传感器通道62内的定位改善了磁场传感器56输出的传感器信号的质量,从而限制了外部电场和来自未与磁场传感器56对齐的其他磁体40的杂散磁场对于对齐的磁体40的磁场的检测的影响。
31.集成电路58从每个磁场传感器56接收传感器信号。在所示的实施例中,集成电路58接收三个传感器信号;第一传感器信号,表示绕第一旋转轴线32b的第一磁体42的磁场,第二传感器信号,表示绕第二旋转轴线34b的第二磁体44的磁场,以及第三传感器信号,表示绕第三旋转轴线38b的第三磁体46的磁场。
32.因为每个齿轮40的磁场由于相应的齿轮30的旋转而变化,所以在集成电路58处接收到的传感器信号表示给定时间点的每个齿轮30的角位置。存储在集成电路58上的算法部分地基于vernier原理来处理接收到的传感器信号。集成电路58存储来自磁场传感器56的三个传感器信号的可能组合,每个组合与轴10的唯一的旋转位置相关联,包括轴10的转数和当前旋转内的轴10的角位置。也就是说,由于齿轮30各自具有不同的齿轮比且各自通过轴10的大转数具有绕其旋转轴线32b、34b、38b的不同角位置,因此每组三个传感器信号(其表示齿轮30上的磁体40的磁场)是可区分的,并且可以分别与轴围绕中心轴线c的特定旋转位置相关联。在集成电路58的实施例中,表示齿轮30旋转期间的磁体40的磁场的传感器信号的每个组合可以与轴10的唯一旋转位置相关联,多至轴10在顺时针和逆时针旋转方向上绕中心轴线c旋转八十四圈。
33.集成电路58基于算法的执行确定与在给定时间接收的传感器信号相关联的唯一旋转位置,以此确定给定时间的轴10的唯一旋转位置。集成电路58能够在多转测量系统运
行期间的任何给定时间(包括在打开多转测量系统后立即)确定轴10的唯一旋转位置。在实施例中,集成电路58仅基于从磁场传感器56接收的传感器信号来确定轴10的唯一旋转位置。
34.以ic haus制造的ic-mnf实现的集成电路58适用于对齿轮30之间的角速度和角位置的特定关系执行上述计算。多个小齿轮20允许来自磁场传感器56的传感器信号由集成电路58处理,齿轮30具有较小数量的齿32t、34t、38t,从而减小了多转测量系统的整体尺寸。
35.集成电路58以通信板70可读取的格式将轴10的唯一旋转位置作为输出信号发送至通信板70。在实施例中,集成电路58将输出信号输出为串行外围接口(spi)信号。如图1和2所示,通信板70将输出信号从集成电路58发送到多转测量系统外部的设备。通信板70是可更换的,并且基于期望的连接布置和输出信号的信号格式选择与多转测量系统一起使用的特定的通信板70。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1