MEMS陀螺正交误差校正系统
mems陀螺正交误差校正系统
技术领域
1.本发明涉及微机电系统(micro-electro-mechanical system,mems)惯性传感器领域的技术领域,特别是涉及一种mems陀螺正交误差校正系统。
背景技术:
2.陀螺仪是惯性导航系统的关键传感器之一,其性能直接决定了导航系统的精度。传统的激光陀螺、光纤陀螺和原子陀螺等具有精度高、稳定性好等优点,但是价格昂贵、体积较大,无法满足导航系统的小型化要求。基于mems技术的微机械陀螺,体积小、功耗低且易批量化生产,是未来陀螺仪传感器的一个重要发展方向。因此,如何实现mems陀螺达到导航级精度水平一直是该领域研究的重点和难点。
3.正交误差是目前影响mems陀螺精度提高的最显著误差源之一。这是由于mems陀螺在微加工过程中不可避免的存在非线性刚度耦合误差。与敏感模态的角速率位移相比,陀螺驱动位移较大,导致刚度耦合误差产生的正交位移也很大。这严重影响了mems陀螺的各项指标精度。现有的mems陀螺正交误差校正(抑制)技术主要包括以下两种:
4.(1)机械校正技术
5.机械校正需要mems陀螺结构具有特定的校正电极,通过在校正电极加载dc直流电压来调整陀螺刚度误差,实现陀螺模态刚度同性对称。
6.(2)电路校正技术
7.电路校正需要外围接口电路产生反馈静电力去平衡抵消mems陀螺上的等效正交误差力,达到校正的结果。
8.现有研究表明,基于高阶微机电sigma-delta力平衡闭环调制的mems陀螺技术,兼具数字静电力反馈平衡和高阶sigma-delta信号调制输出的优点,是实现高精度导航级mems 陀螺传感器的有效技术之一,在传感器系统的灵活性、稳定性和集成性等方面均具有显著的优势。但是,现有的微机电sigma-delta陀螺技术还无法对mems陀螺正交误差进行有效的校正,这也制约了微机电sigma-delta陀螺精度的进一步提高。
技术实现要素:
9.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种mems陀螺正交误差校正系统,能够在不增加特定校正电极的前提下,解决现有技术中对mems陀螺正交误差抑制能力和校正实时性不强的问题,有效提高了mems陀螺的精度。
10.为实现上述目的及其他相关目的,本发明提供一种mems陀螺正交误差校正系统,包括: mems陀螺敏感模态电极,用于生成位移信号;预处理组件,与所述mems陀螺敏感模态电极相连,用于将所述位移信号转换为数字电压信号;数字解调组件,与所述多位量化器和所述mems陀螺敏感模态电极相连,用于根据所述数字电压信号生成同相1比特脉宽密度调制信号和正交相1比特脉宽密度调制信号,并反馈至所述mems陀螺敏感模态电极。
11.于本发明一实施例中,所述mems陀螺敏感模态电极包括检测电极和反馈电极;所
述检测电极用于生成所述位移信号;所述反馈电极用于接收所述同相1比特脉宽密度调制信号和所述正交相1比特脉宽密度调制信号。
12.于本发明一实施例中,所述预处理组件包括:
13.前置电路,与所述mems陀螺敏感模态电极相连,用于将所述mems陀螺敏感模态电极生成的位移信号转换为模拟电压信号;
14.多位量化器,与所述前置电路相连,用于将所述模拟电压信号转换为数字电压信号。
15.于本发明一实施例中,所述数字解调组件包括同向解调模块、正交相解调模块、同相低通滤波模块、正交相低通滤波模块、同向调制模块、正交相调制模块、同相sigma-delta调制单元、正交相sigma-delta调制单元和反馈控制开关;
16.所述同向解调模块与所述预处理组件的输出端相连,用于根据所述数字电压信号生成同相解调信号;
17.所述正交相解调模块与所述预处理组件的输出端相连,用于根据所述数字电压信号生成正交相解调信号;
18.所述同相低通滤波模块与所述同向解调模块相连,用于对所述同相解调信号进行低通滤波;
19.所述正交相低通滤波模块与所述正交向解调模块相连,用于对所述正交相解调信号进行低通滤波;
20.所述同向调制模块与所述同相低通滤波模块相连,用于将低通滤波后的同相解调信号调制为高频同相信号;
21.所述正交相调制模块与所述正交相低通滤波模块相连,用于将低通滤波后的正交相解调信号调制为高频正交相信号;
22.所述同相sigma-delta调制单元与所述同相调制模块相连,用于根据所述高频同相信号生成所述同相1比特脉宽密度调制信号;
23.所述正交相sigma-delta调制单元与所述正交相调制模块相连,用于根据所述高频正交相信号生成所述正交相1比特脉宽密度调制信号;
24.所述反馈控制开关与所述同相sigma-delta调制单元和所述正交相sigma-delta调制单元相连,用于根据控制时序将所述同相1比特脉宽密度调制信号和所述正交相1比特脉宽密度调制信号反馈至所述mems陀螺敏感模态电极。
25.于本发明一实施例中,所述同相sigma-delta调制单元包括sigma-delta调制器、数字补偿器和1比特量化器;所述sigma-delta调制器用于对所述高频同相信号进行sigma-delta调制,生成同相脉宽密度调制信号;所述数字补偿器用于对所述同相脉宽密度调制信号进行数字补偿;所述1比特量化器用于根据所述同相脉宽密度调制信号生成所述同相1比特脉宽密度调制信号。
26.于本发明一实施例中,所述sigma-delta调制器采用sigma-delta前馈结构或分布多反馈结构。
27.于本发明一实施例中,所述正交相sigma-delta调制单元包括sigma-delta调制器、数字补偿器和1比特量化器;所述sigma-delta调制器用于对所述高频正交相信号进行sigma-delta 调制,生成正交相脉宽密度调制信号;所述数字补偿器用于对所述正交相脉
宽密度调制信号进行数字补偿;所述1比特量化器用于根据所述正交相脉宽密度调制信号生成所述正交相1 比特脉宽密度调制信号。
28.于本发明一实施例中,所述sigma-delta调制器采用sigma-delta前馈结构或分布多反馈结构。
29.于本发明一实施例中,所述数字解调组件还包括时序控制单元,用于生成控制时序并输入所述反馈控制开关。
30.于本发明一实施例中,所述数字解调组件基于fpga实现。
31.如上所述,本发明的mems陀螺正交误差校正系统,具有以下有益效果:
32.(1)通过将mems陀螺敏感模态的输出信号进行解调和调制,形成两路正交的微机电 sigma-delta调制闭环测控回路,从而在实现角速率科氏力平衡闭环的同时,对陀螺正交误差力进行平衡闭环校正;
33.(2)能够在不增加特定校正电极的前提下,解决现有技术中对mems陀螺正交误差抑制能力和校正实时性不强的问题,有效提高了mems陀螺的精度;
34.(3)相比借助于特定电极的传统机械校正方法,能够在数字域实现,具有较高的灵活性和集成性。
附图说明
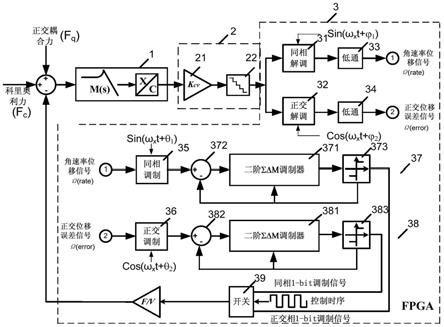
35.图1显示为本发明的mems陀螺正交误差校正系统于一实施例中的结构示意图;
36.图2显示为本发明的mems陀螺于一实施例中的微机械结构原理图;
37.图3显示为本发明的sigma-delta调制单元于一实施例中的结构原理图;
38.图4显示为本发明的mems陀螺进行sigma-delta正交误差校正前后的仿真结果图;
39.图5显示为本发明的mems陀螺进行sigma-delta正交误差校正前后的测试结果图。
具体实施方式
40.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
41.需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
42.本发明的mems陀螺正交误差校正系统通过将mems陀螺敏感模态的输出信号进行解调和调制,能够在不增加特定校正电极的前提下,有效提高mems陀螺的精度,同时解决现有技术中对mems陀螺正交误差抑制能力和校正实时性不强的问题,极具实用性。
43.如图1和图2所示,于一实施例中,本发明的mems陀螺正交误差校正系统包括mems 陀螺敏感模态电极1、预处理组件2和数字解调组件3。
44.所述mems陀螺敏感模态电极1用于生成位移信号。具体地,所述mems陀螺敏感模态
电极包括检测电极和反馈电极。所述检测电极用于生成位移信号,其中所述位移信号包括正交位移误差信号和角速率位移信号,为二者的叠加。所述反馈电极用于接收所述数字解调组件3返回的同相1比特脉宽密度调制信号和正交相1比特脉宽密度调制信号,从而通过闭环方式实现mems陀螺正交误差校正。
45.所述预处理组件2与所述mems陀螺敏感模态电极1相连,用于将所述位移信号转换为数字电压信号。于本发明一实施例中,所述预处理组件2包括串联的前置电路21和多位量化器22。所述前置电路21与所述mems陀螺敏感模态电极1相连,用于将所述mems陀螺敏感模态电极1生成的位移信号转换为模拟电压信号v
sense
(t)。优选地,所述前置电路21采用电容电压特征测试装置,从而将以电容表征的位移信号转换模拟电压信号。所述多位量化器 22用于将所述模拟电压信号v
sense
(t)转换为数字电压信号v
sense
(z)。
46.数字解调组件3与所述多位量化器22和所述mems陀螺敏感模态电极1相连,用于根据所述数字电压信号生成同相1比特脉宽密度调制信号和正交相1比特脉宽密度调制信号,并反馈至所述mems陀螺敏感模态电极1。
47.于本发明一实施例中,所述数字解调组件3包括同向解调模块31、正交相解调模块32、同相低通滤波模块33、正交相低通滤波模块34、同向调制模块35、正交相调制模块36、同相sigma-delta调制单元37、正交相sigma-delta调制单元38和反馈控制开关39。
48.所述同向解调模块31与所述预处理组件2的输出端相连,用于根据所述数字电压信号 v
sense
(z)生成同相解调信号v
rate
(z)。其中,所述同相解调信号v
rate
(z)为角速率位移信号。所述同相解调模块31包括一路输入的解调基准信号,即0
°
相移的驱动模态位移信号v
in-phase
(z)。
49.所述正交相解调模块32与所述预处理组件2的输出端相连,用于根据所述数字电压信号 v
sense
(z)生成正交相解调信号v
error
(z)。其中,所述正交相解调信号v
error
(z)为正交位移误差信号。所述正交相解调模块32包括一路输入的解调基准信号,即90
°
相移的驱动模态位移信号v
quad-phase
(z)。
50.所述同相低通滤波模块33与所述同向解调模块31相连,用于对所述同相解调信号v
rate
(z) 进行低通滤波。
51.所述正交相低通滤波模块34与所述正交向解调模块32相连,用于对所述正交相解调信号v
error
(z)进行低通滤波。
52.所述同向调制模块35与所述同相低通滤波模块33相连,用于将低通滤波后的同相解调信号v
rate
(z)调制为高频同相信号v’rate
(z)。其中,所述同相调制模块35包括一路输入的调制基准信号,即同相调制基准信号v’in-phase
(z)。
53.所述正交相调制模块36与所述正交相低通滤波模块34相连,用于将低通滤波后的正交相解调信号调制为高频正交相信号v’error
(z)。其中,所述正交相调制模块36包括一路输入的调制基准信号,即正交相调制基准信号v’quad-phase
(z)。
54.所述同相sigma-delta调制单元37与所述同相调制模块35相连,用于根据所述高频同相信号v’rate
(z)生成所述同相1比特脉宽密度调制信号b
in-phase
(t)。于本发明一实施例中,所述同相sigma-delta调制单元37包括sigma-delta调制器371、数字补偿器372和1比特量化器373。所述sigma-delta调制器371用于对所述高频同相信号v’rate
(z)进行sigma-delta调制,生成同相脉宽密度调制信号。所述数字补偿器372用于对所述同相脉宽密度调
制信号进行数字补偿。所述1比特量化器373用于根据所述同相脉宽密度调制信号生成所述同相1比特脉宽密度调制信号b
in-phase
(t)。优选地,所述sigma-delta调制器371采用可选的高阶sigma-delta调制器,可以是sigma-delta前馈结构(feed-forward)或分布多反馈结构(multi-feedback)。
55.所述正交相sigma-delta调制单元38与所述正交相调制模块36相连,用于根据所述高频正交相信号v’error
(z)生成所述正交相1比特脉宽密度调制信号b
quad-phase
(t)。于本发明一实施例中,所述正交相sigma-delta调制单元38包括sigma-delta调制器381、数字补偿器382和1 比特量化器383。所述sigma-delta调制器381用于对所述高频正交相信号v’error
(z)进行 sigma-delta调制,生成正交相脉宽密度调制信号。所述数字补偿器382用于对所述正交相脉宽密度调制信号进行数字补偿。所述1比特量化器383用于根据所述正交相脉宽密度调制信号生成所述正交相1比特脉宽密度调制信号b
quad-phase
(t)。优选地,所述sigma-delta调制器 381采用可选的高阶sigma-delta调制器,可以是sigma-delta前馈结构(feed-forward)或分布多反馈结构(multi-feedback)。
56.所述反馈控制开关39与所述同相sigma-delta调制单元37和所述正交相sigma-delta调制单元38相连,用于根据控制时序将所述同相1比特脉宽密度调制信号b
in-phase
(t)和所述正交相1比特脉宽密度调制信号b
quad-phase
(t)反馈至所述mems陀螺敏感模态电极1,从而与所述 mems陀螺敏感模态电极1一起形成了同相微机电sigma-delta闭环调制回路和正交相微机电sigma-delta闭环调制回路。
57.于本发明一实施例中,所述数字解调组件3还包括时序控制单元(图中未示出),用于生成控制时序并输入所述反馈控制开关39。其中,所述反馈控制开关34包括第一端、第二端、第三端和第四端;所述第一端和所述第二端分别与所述同相1比特脉宽密度调制信号b
in-phase
(t) 和所述正交相1比特脉宽密度调制信号b
quad-phase
(t)相连;所述第三端和所述第四端分别与所述mems陀螺敏感模态电极1和所述时序控制单元相连接。
58.优选地,本发明的mems陀螺正交误差校正系统还包括频率电压转换电路(f/v),与所述反馈控制开关39和所述mems陀螺敏感模态电极1,用于将所述反馈控制开关39输出的频率形式的控制信号转换电压信号再反馈至所述mems陀螺敏感模态电极1中。
59.于本发明一实施例中,所述数字解调组件基于fpga实现。
60.下面通过具体实施例来进一步阐述本发明的mems陀螺正交误差校正系统。
61.在该实施例中,采用的mems陀螺为圆盘轮式谐振结构,首先陀螺在驱动电极激励作用下,内环和外环惯性转子沿着z轴平面内转动谐振,当陀螺基座沿着x/y轴转动时,角速率与惯性谐振转子一起在陀螺结构上产生科氏力,该科氏力导致惯性转子在z轴方向进行差分振动,通过提取该差分振动信号就可以用于表征角速率信号。其中,mems陀螺驱动模态和敏感模态中心转动惯量(μg
×
μm2)分别为id=1.11
×
107、is=1.11
×
107;谐振品质因素(q值) 分别为:qd=5.1
×
105、qs=8000;谐振频率(hz)分别为fd=4660、fs=4760。mems陀螺敏感结构同时受产生的科氏力和正交误差力作用,作用力的表达式分别可以写为:
62.f
coriolis
(t)=2
·m·
ω
·
ωd·a·
sin(ωdt)
[0063][0064]ftotal
(t)=f
coriolis
(t)+f
quad
(t)
[0065]
=ωd·a·
m(2
·
ω
·
sin(ωdt)+ε
·
ωd·
cos(ωdt))
[0066]
其中,m、ω、ωd、a和ε分别为mems陀螺的有效转动惯量、外部输入角速率、驱动谐振频率、驱动谐振幅值和正交耦合系数。通过以上计算可以看出,mems陀螺敏感模态检测电极输出的是正交位移误差信号和角速率位移信号叠加的电容信号δc(t)。该电容信号δ c(t)经过前置电路转换为电压信号δv(t),电压信号δv(t)经过18位量化器转换为数字电压信号v
sense
(z),其中z=nt,n为采样数,t为采样周期。
[0067]
该数字电压信号v
sense
(z)进入数字解调组件中的同相解调模块、正交相解调模块、同相低通滤波模块和正交相低通滤波模块。在同相解调模块和正交相解调模块中分别与解调参考信号和进行同相和正交相解调,解调之后分别得到信号v
′
rate
(nt)和 v
′
error
(nt);v
′
rate
(nt)和v
′
error
(nt)再分别经过同相低通滤波模块和正交相低通滤波模块分别得到同相角速率电压信号v
rate
(nt)和正交相误差电压信号v
error
(nt)。以上各部分信号的表达式如下所示:
[0068]v′
rate
(nt)=ωd·a·m·
(2ω(1-cos(2ωdnt))+0.5εωdsin(2ωdnt))
[0069]v′
error
(nt)=ωd·a·m·
(2ωsin(2ωdnt))+0.5εωd(1+cos(2ωdnt))
[0070]
|v
rate
(nt)|=|2ωd·a·m·
ω|
[0071][0072]
同相角速率信号v
rate
(nt)和正交相误差信号v
error
(nt)分别进入数字调制组件中的同相调制模块和正交相调制模块,与调制参考信号sin(ωdnt+θ1)和cos(ωdnt+θ2)分别进行调制得到高频同相角速率调制电压信号v
″
rate
(nt)和高频正交相误差调制电压信号v
″
error
(nt)。v
″
rate
(nt)和 v
″
error
(nt)的信号表达式分别如下:
[0073]v″
rate
(nt)=2ωd·a·m·
ω
·
sin(ωdnt+θ1)
[0074][0075]
图3所示即为同相回路和正交相回路中的二阶分布反馈式sigma-delta调制器,调制器中包括多分布式反馈通道b和b1、c和c1、电前馈通道d和d1。
[0076]
同相回路要处理的信号包括科氏力信号fc、电噪声信号e
noise
和量化噪声信号q
noise1
和 q
noise2
,正交相回路输出数字信号b
in-phase
(t)表达式为 b
in-phase
(t)=stf
×
(f
coriolis force
)+entf
×enoise
+q1ntf
×qnoise_1
+q2ntf
×qnoise_2
。正交相回路要处理的信号包括正交耦合误差力信号fq、电噪声信号e'
noise
和量化噪声信号q'
noise_1
和q'
noise_2
,正交相回路输出数字信号b
quad-phase
(t)表达式为b
in-phase
(t)=stf'
×
(f
coriolisforce
)+entf
×enoise
+q1ntf
×
q'
noise_1
+q2ntf
×
q'
noise_2
。其中包括科氏力传递函数(stf)、正交误差力传递函数(stf')、电噪声传递函数(entf) 和量化噪声传递函数(q1ntf和q2ntf),表达式分别为:
[0077][0078][0079][0080]
[0081][0082]
其中,m(z)为陀螺敏感模态传递函数表达式,k
po
为c/v前置接口电路增益系数,k
fb
为反馈增益系数,其中t(z)和l(z)的表达式分别为和k
q1
和k
q2
分别为多位adc和1位量化器的量化增益。
[0083]
如图4所示为本发明mems陀螺simulink系统模型仿真输出信号功率谱密度(psd),其中输出信号的sigma-delta噪声整形中心频率位于4760hz,正交误差信号频率位于4660hz,在正交误差校准前陀螺系统正交误差等效输出角速率值为200/s,经过sigma-delta正交误差校准之后陀螺正交误差幅值的衰减度超过了80db,小于0.02/s。
[0084]
基于加工封装完成的mems陀螺芯片构建了角速率传感系统,如图5所示,整个mems 陀螺传感系统的面积为6cm
×
3cm,采用单电源+5v供电。输出信号的功率谱密度也如图5所示。其中sigma-delta噪声整形中心频率也位于4760hz,正交误差等效输入角速率值为200/s, 64hz带宽范围内底噪为-120db。经过sigma-delta正交误差校准之后陀螺正交误差幅值的衰减度达到了80db,与仿真结果相吻合。
[0085]
综上所述,本发明的mems陀螺正交误差校正系统通过将mems陀螺敏感模态的输出信号进行解调和调制,形成两路正交的微机电sigma-delta调制闭环测控回路,从而在实现角速率科氏力平衡闭环的同时,对陀螺正交误差力进行平衡闭环校正;能够在不增加特定校正电极的前提下,解决现有技术中对mems陀螺正交误差抑制能力和校正实时性不强的问题,有效提高了mems陀螺的精度;相比借助于特定电极的传统机械校正方法,能够在数字域实现,具有较高的灵活性和集成性。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
[0086]
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1