船舶监测系统及船舶监测方法与流程
1.本发明涉及船舶领域,具体涉及一种船舶监测系统及船舶监测方法。
背景技术:
2.目前,用于监测船舶气态污染物的监测系统采用单一监测装置,数据源单一,很难较准确地监测船舶排放情况,并且市面上没有一整套用于监测船舶气态污染物排放的监测系统。
3.为此,本发明提供一种船舶监测系统及船舶监测方法,用以至少部分地解决上述问题。
技术实现要素:
4.在发明内容部分中引入了一系列简化形式的概念,这将在具体实施例部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
5.为至少部分地解决上述技术问题,本发明提供了一种船舶监测系统,用于监测预定航道内的船舶的烟羽浓度,其特征在于,包括:
6.固定监测设备,固定监测设备用于监测固定监测区域内的固定监测烟羽浓度信息;
7.移动监测设备,移动监测设备能够移动至船舶处,以监测船舶处的船舶烟羽浓度信息;以及
8.控制中心,控制中心电连接至固定监测设备和移动监测设备,控制中心构造为根据固定监测设备监测的数据对船舶进行粗筛,并根据移动监测设备监测的数据对满足粗筛条件的船舶进行精筛,以将满足精筛条件的船舶确定为超标船舶。
9.根据本发明的船舶监测系统,船舶监测系统通过对在预定航道内航行的船舶进行粗筛和精筛,可以准确的确定超标船舶。
10.可选地,船舶监测系统包括红外监测设备,红外监测设备构造为通过红外监测红外监测区域内的红外监测烟羽浓度信息,控制中心构造为根据红外监测烟羽浓度信息进行初筛,控制中心电连接至船舶自动识别系统,以通过船舶自动识别系统定位当前位于红外监测区域内的船舶,并对满足初筛条件的船舶进行粗筛。
11.可选地,船舶监测系统还包括用于监测预定航道内的影像的视频影像设备,控制中心电连接至视频影像设备,控制中心构造为根据视频影像设备监测的数据将满足精筛条件和影像条件的船舶确定为超标船舶。
12.可选地,预定航道的两侧均设置有固定监测设备。
13.可选地,视频影像设备位于海岸上。
14.可选地,船舶监测系统包括至少两个红外监测设备,沿预定航道的延伸方向,固定监测设备位于相邻的红外监测设备之间。
15.可选地,固定监测烟羽浓度信息包括co2浓度和so2浓度,控制中心通过燃油含硫量计算算法确定的数值进行粗筛,并且/或者
16.船舶烟羽浓度信息均包括co2浓度和so2浓度,控制中心通过燃油含硫量计算算法确定的数值进行精筛。
17.可选地,固定监测烟羽浓度信息包括no
x
浓度、co2浓度、so2浓度、风向,以及风速,控制中心根据no
x
浓度、co2浓度、so2浓度、风向,以及风速,通过烟羽识别算法、烟羽溯源算法,以及燃油含硫量计算算法确定的数值进行粗筛。
18.可选地,控制中心包括云端数据平台。
19.本发明还提供了一种船舶监测方法,用于前述的船舶监测系统,包括:
20.根据固定监测设备监测的数据进行粗筛;
21.根据移动监测设备监测的数据对满足粗筛条件的船舶进行精筛;
22.将满足精筛条件的船舶确定为超标船舶。
23.根据本发明的船舶监测方法,船舶监测系统通过对在预定航道内航行的船舶进行粗筛和精筛,可以准确的确定超标船舶。
24.可选地,船舶监测系统包括红外监测设备,粗筛的步骤之前,船舶监测方法还包括:
25.红外监测设备通过红外监测红外监测区域内的红外监测烟羽浓度信息;
26.根据红外监测烟羽浓度信息进行初筛;
27.通过船舶自动识别系统定位当前位于红外监测区域内的船舶;
28.对满足初筛条件的船舶进行粗筛。
29.可选地,船舶监测系统还包括视频影像设备,船舶监测方法还包括:
30.根据视频影像设备监测的数据将满足精筛条件和影像条件的船舶确定为超标船舶。
31.可选地,固定监测烟羽浓度信息包括co2浓度和so2浓度,粗筛的步骤包括:
32.通过燃油含硫量计算算法确定的数值进行粗筛,并且/或者
33.船舶烟羽浓度信息均包括co2浓度和so2浓度,精筛的步骤包括:
34.通过燃油含硫量计算算法确定的数值进行精筛。
35.可选地,固定监测烟羽浓度信息包括no
x
浓度、co2浓度、so2浓度、风向,以及风速,粗筛的步骤包括:
36.根据no
x
浓度、co2浓度、so2浓度、风向,以及风速,通过烟羽识别算法、烟羽溯源算法,以及燃油含硫量计算算法确定的数值进行粗筛。
附图说明
37.为了使本发明的优点更容易理解,将通过参考在附图中示出的具体实施方式更详细地描述上文简要描述的本发明。可以理解这些附图只描绘了本发明的典型实施方式,因此不应认为是对其保护范围的限制,通过附图以附加的特性和细节描述和解释本发明。
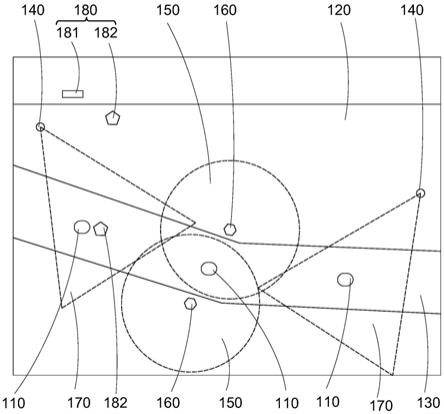
38.图1为根据本发明的优选实施方式的监测系统设置在水域处的示意图;以及
39.图2为用于图1的监测系统的一个优选实施方式的监测方法的流程示意图;以及
40.图3为根据本发明的一个优选实施方式的监测方法的流程示意图。
41.附图标记说明
42.110:船舶
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
120:海洋
43.130:预定航道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
140:红外监测设备
44.150:固定监测区域
ꢀꢀꢀꢀꢀ
160:固定监测设备
45.170:红外监测区域
ꢀꢀꢀꢀꢀ
180:移动监测设备
46.181:无人机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
182:无人船
具体实施方式
47.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员来说显而易见的是,本发明实施方式可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明实施方式发生混淆,对于本领域公知的一些技术特征未进行描述。
48.以下参照附图对本发明的优选实施方式进行说明。需要说明的是,本文中所使用的术语“上”、“下”以及类似的表述只是为了说明的目的,并非限制。
49.在本文中,本技术中所引用的诸如“第一”和“第二”的序数词仅仅是标识,而不具有任何其它含义,例如特定的顺序等。而且,例如,术语“第一部件”其本身不暗示“第二部件”的存在,术语“第二部件”本身不暗示“第一部件”的存在。
50.为了彻底了解本发明实施方式,将在下列的描述中提出详细的结构。显然,本发明实施方式的施行并不限定于本领域的技术人员所熟习的特殊细节。本发明的较佳实施方式详细描述如下,然而除了这些详细描述外,本发明还可以具有其他实施方式。
51.本发明提供了一种船舶监测系统。该船舶监测系统可以用于监测预定航道130内的船舶110排放的烟羽(气体),进而确定排放超标的船舶110。需要说明的是预定航道130可以是河流、湖泊以及海洋120等水域中的航道。本实施方式以海洋120中的航道为例进行说明。
52.请参考图1,船舶监测系统包括固定监测设备160、移动监测设备180,以及控制中心(未示出)。固定监测设备160用于设置于海洋中的固定监测位置,以监测固定监测区域150内的固定监测烟羽浓度信息。其中,固定监测烟羽浓度信息可以包括co2浓度和so2浓度。
53.优选地,固定监测设备160可包括no
x
分析仪、so2分析仪、co2分析仪、气象仪、用于定位的北斗模块、用于过滤和干燥气体的气体处理装置、用于吹扫以除去前述各个分析仪中的残气的扫气装置。no
x
分析仪设置有用于感测其所在地的气体中的no
x
(no2和no)的no
x
传感器。气象仪设置有用于采集风速信息和风向信息的气象传感器。so2分析仪用于感测其所在地的气体中的so2的浓度。co2分析仪用于感测其所在地的气体中的co2的浓度。固定监测设备160还用于采集其所在地的气温信息、气压信息、相对湿度信息、降雨量信息,以及经纬度信息。
54.请参考图1,移动监测设备180可移动地设置,以用于移动至后文的粗筛疑似船舶的附近,以跟随粗筛疑似船舶并监测粗筛疑似船舶处的烟羽。
55.优选地,移动监测设备180包括设置有移动嗅探设备的无人机181和无人船182。移动嗅探设备包括用于感测no
x
(no2、no)的电化学传感器、用于感测so2的电化学传感器、用于感测co2的电化学传感器、气象传感器,以及定位传感器。移动嗅探设备用于监测其所在地
的气体中的no2的浓度、no的浓度、so2的浓度,以及co2的浓度。移动嗅探设备还用于监测其所在地的气温信息、气压信息、相对湿度信息,以及经纬度信息。
56.当后文的控制中心确定粗筛疑似船舶时,控制中心控制无人机181和/或无人船182移动至粗筛疑似船舶处,以将移动嗅探设备移动至粗筛疑似船舶处,进而监测粗筛疑似船舶排放的烟羽的船舶烟羽浓度信息。
57.控制中心电连接固定监测设备160和移动监测设备180,以控制固定监测设备160和移动监测设备180的动作。控制中心可以通过固定监测设备160采集固定监测区域150内的固定监测烟羽浓度信息,以及可以通过移动监测设备180采集船舶处的船舶烟羽浓度信息。
58.控制中心可以包括云端数据平台。云端数据平台上设置有基于高斯烟羽扩散模型的烟羽识别算法、烟羽溯源算法,以及燃油含硫量计算算法。云端数据平台可以电连接至后文的红外监测设备140、固定监测设备160,以及移动监测设备180。这样,云端数据平台可以和后文的红外监测设备140、固定监测设备160,以及移动监测设备180进行无线通信。控制中心还可以和ais系统(船舶自动识别系统,automatic identification system)通信,以获取船舶信息,进而通过ais系统定位船舶。
59.控制中心可以根据固定监测烟羽浓度信息对船舶进行粗筛。如果当前的固定监测烟羽浓度信息满足粗筛条件(可以预先确定),则说明在当前时刻位于固定监测区域150内的船舶可能为排放超标船舶。控制中心将在当前时刻位于固定监测区域150内的船舶确定粗筛疑似船舶。
60.优选地,在进行前述的粗筛时,控制中心根据固定监测烟羽浓度信息的co2浓度和so2浓度,以及通过燃油含硫量计算算法确定粗筛燃油含硫量。控制中心根据粗筛燃油含硫量进行前述的粗筛。此时粗筛条件包括粗筛燃油含硫量大于粗筛预定燃油含硫量。如果粗筛燃油含硫量大于粗筛预定燃油含硫量,则判定当前位于固定监测区域150内的船舶满足粗筛条件。
61.在确定粗筛疑似船舶后,控制中心可以控制移动监测设备180移动至该粗筛疑似船舶处,以监测该粗筛疑似船舶处的船舶烟羽浓度信息。控制中心可以通过船舶烟羽浓度信息对粗筛疑似船舶进行精筛,进而判断该粗筛疑似船舶是否为超标船舶。如果粗筛疑似船舶的船舶烟羽浓度信息满足精筛条件,则说明粗筛疑似船舶排放超标,此时可以将粗筛疑似船舶确定为超标船舶。其中,船舶烟羽浓度信息包括co2浓度和so2浓度。
62.优选地,在进行前述的精筛时,控制中心根据船舶烟羽浓度信息的co2浓度和so2浓度,以及通过燃油含硫量计算算法确定船舶燃油含硫量。控制中心根据船舶燃油含硫量进行前述的精筛。此时精筛条件包括船舶燃油含硫量大于船舶预定燃油含硫量。如果船舶燃油含硫量大于船舶预定燃油含硫量,则判定当前的粗筛疑似船舶满足精筛条件。
63.进一步优选地,控制中心通过移动监测设备180采集粗筛疑似船舶处的nox浓度。控制中心根据nox浓度,以及通过基于高斯烟羽扩散模型的烟羽识别算法判定粗筛疑似船舶处是否有烟羽。如果判定粗筛疑似船舶处有烟羽,则通过移动监测设备180采集船舶烟羽浓度信息,并根据船舶烟羽浓度信息确定船舶燃油含硫量。由此,可以进一步减少船舶监测系统的计算量。
64.本实施方式中,船舶监测系统通过对在预定航道130内航行的船舶110进行粗筛和
精筛,可以准确的确定超标船舶。
65.如图1所示,船舶监测系统还包括和控制中心电连接的红外监测设备140。红外监测设备140用于设置于海洋中的红外监测位置,以监测红外监测区域170内的红外监测烟羽浓度信息。
66.红外监测设备140用于通过例如红外光谱遥测技术监测红外监测区域170内烟羽的红外监测烟羽浓度信息。其中,红外监测区域170为红外监测设备140的遥测区域。其中,红外监测烟羽浓度信息可以包括co2浓度和so2浓度。
67.请参考图1,海洋120中设置有预定航道130。船舶监测系统包括两个红外监测设备140。在预定航道130的延伸方向上(大致为图1的左右方向),两个红外监测设备140之间有间隔。这样,在预定航道130的延伸方向上,一个红外监测区域170和另一个红外监测区域170之间存在间隔。
68.在图示实施方式中,沿预定航道130的延伸方向,固定监测设备160设置在两个红外监测设备140之间。
69.船舶监测系统可包括两个固定监测设备160。两个固定监测设备160分别设置在预定航道130的延伸方向的两侧。
70.由此,沿预定航道130航行的船舶110(包括沿图1的左右方向自右向左航行的船舶110,以及自左向右航行的船舶110)均先经过一个红外监测区域170,然后进入一个固定监测区域150。需要说明的是,如图1所示,红外监测区域170、固定监测区域150以及预定航道130存在重叠。
71.船舶在预定航道130内航行时,船舶监测系统可以先通过红外监测设备140对航行于红外监测区域170内的船舶110进行监测,进而根据红外监测设备140监测的数据(红外监测烟羽浓度信息)对在红外监测区域170内航行的船舶进行初筛,以将满足初筛条件的船舶确定为初筛疑似船舶。在初筛时,控制中心还可以通过ais系统定位在红外监测区域170内航行的船舶。
72.当初筛疑似船舶进入固定监测区域150内时,可以通过固定监测设备160对初筛疑似船舶进行粗筛,以将满足粗筛条件的初筛疑似船舶确定为粗筛疑似船舶。然后控制移动监测设备180移动至粗筛疑似船舶处,以对粗筛疑似船舶进行精筛。
73.可以理解,在未示出的实施方式中,船舶监测系统可以通过红外监测设备140对在经过红外监测区域170的船舶进行初筛。并且对经过固定监测区域150的船舶进行粗筛。将同时满足粗筛条件和初筛条件的船舶确定为粗筛疑似船舶,进而控制中心控制移动监测设备180移动至粗筛疑似船舶处,以对粗筛疑似船舶进行精筛。
74.优选地,控制中心根据红外监测烟羽浓度信息的co2浓度和so2浓度,以及通过燃油含硫量计算算法确定初筛燃油含硫量。控制中心根据初筛燃油含硫量进行前述的初筛。此时初筛条件包括初筛燃油含硫量大于初筛预定燃油含硫量。如果初筛燃油含硫量大于初筛预定燃油含硫量,则判定当前位于红外监测区域170内的船舶满足初筛条件。
75.优选地,在进行前述的粗筛时,控制中心根据no
x
浓度、co2浓度、so2浓度、风向,以及风速,通过烟羽识别算法、烟羽溯源算法,以及燃油含硫量计算算法确定的数值进行粗筛。
76.具体地,在进行粗筛时,控制中心通过固定监测设备160采集固定监测区域150内
的no
x
浓度。控制中心根据no
x
浓度,以及通过基于高斯烟羽扩散模型的烟羽识别算法判定固定监测区域150内是否有烟羽。如果判定固定监测区域150内有烟羽,则通过固定监测设备160采集固定监测烟羽浓度信息,并根据固定监测烟羽浓度信息确定粗筛燃油含硫量。由此,可以减少船舶监测系统的计算量。
77.在进行粗筛时,控制中心还根据固定监测区域150内的风向信息、风速信息,以及通过ais系统获取的船舶信息,通过烟羽溯源算法确定粗筛疑似船舶的实时位置。由此可以更加准确的定位粗筛疑似船舶。
78.船舶监测系统还可以包括视频影像设备(未示出),例如摄像机。视频影像设备可以设置在海岸上。视频影像设备与控制中心电连接。视频影像设备用于拍摄预定航道130的影像。这样,控制中心可以通过视频影像设备实时监控预定航道130。控制中心可以通过比较视频影像设备拍摄的影像,进而将满足影像条件和后文的精筛条件的船舶确定为超标船舶。由此,进一步提高确定超标船舶的准确性。
79.如图2所示,船舶监测系统对预定航道130内的船舶110排放的烟羽进行监测的船舶监测方法包括步骤s1、s2与s3。
80.具体地,步骤s1:根据固定监测设备160监测的数据进行粗筛。
81.控制中心通过固定监测设备160采集固定监测区域150内的固定监测烟羽浓度信息,进而根据固定监测烟羽浓度信息对船舶进行粗筛,以判断当前的固定监测烟羽浓度信息是否满足粗筛条件,进而将满足粗筛条件的船舶确定为粗筛疑似船舶。
82.步骤s2:根据移动监测设备180监测的数据对满足粗筛条件的船舶进行精筛。
83.通过步骤s1的粗筛以确定粗筛疑似船舶后,控制中心实时定位粗筛疑似船舶,以控制移动监测设备180移动至粗筛疑似船舶的附近,进而进一步监测粗筛疑似船舶排放的烟羽的船舶烟羽浓度信息。然后根据船舶烟羽浓度信息对粗筛疑似船舶进行精筛。
84.步骤s3:将满足精筛条件的船舶确定为超标船舶。
85.控制中心判断船舶烟羽浓度信息是否满足精筛条件,如果满足,则表示当前的粗筛疑似船舶的排放超标,此时可以将该粗筛疑似船舶确定为超标船舶。
86.由此,船舶监测系统通过对在预定航道130内航行的船舶110进行粗筛和精筛,可以准确的确定超标船舶。
87.优选地,在步骤s1之前,控制船舶监控方法的步骤还包括初筛步骤。初筛步骤包括步骤一、步骤二、步骤三,以及步骤四。
88.步骤一、控制中心控制红外监测设备140通过红外监测红外监测区域170内的红外监测烟羽浓度信息,执行步骤二。
89.步骤二、控制中心根据红外监测烟羽浓度信息进行初筛。步骤二通过红外监测烟羽浓度信息进行初筛大致相同于前述的初筛,这里不再赘述。通过步骤二可以确定初筛疑似船舶。
90.步骤三、通过船舶自动识别系统定位当前位于红外监测区域170内的船舶。在粗筛之前,控制中心还可以通过船舶自动识别系统实时定位通过红外监测区域170的船舶,进而实时定位被确定为初筛疑似船舶的位置。
91.步骤四、对满足初筛条件的船舶进行粗筛。
92.当初筛疑似船舶经过固定监测区域150时,执行前述的步骤s1,以对满足初筛条件
的船舶进行粗筛。
93.优选地,在确定超标船舶的过程中,船舶控制方法还包括影像判断步骤。影像判断步骤包括:根据视频影像设备监测的数据将满足精筛条件和影像条件的船舶确定为超标船舶。
94.控制中心可以通过视频影像设备实时监控预定航道130。控制中心可以通过比较在不同时刻视频影像设备拍摄的影像,以将满足影像条件和精筛条件的船舶确定为超标船舶。由此,进一步提高确定超标船舶的准确性。其中,控制中心比较相隔预定时间段拍摄的两个影像,如果两个影像之间的烟羽面积(烟羽在影像中的面积)的差满足面积预定条件(预先确定),则可以判定在该预定时间段内航行于预定航道内船舶满足影像条件。
95.优选地,粗筛的步骤包括:通过燃油含硫量计算算法确定的数值进行粗筛。
96.精筛的步骤包括:通过燃油含硫量计算算法确定的数值进行述精筛。
97.进一步优选地,粗筛的步骤包括:根据no
x
浓度、co2浓度、so2浓度、风向,以及风速,通过烟羽识别算法、烟羽溯源算法,以及燃油含硫量计算算法确定的数值进行粗筛。
98.如图3所示,本发明还提供了另一种船舶监测方法的优选实施方式。该实施方式的船舶监测方法包括:
99.步骤s21:红外监测设备140通过红外监测红外监测区域170内的红外监测烟羽浓度信息。
100.步骤s22:判断红外监测烟羽浓度信息是否满足初筛条件。如果是则执行后续步骤,以进行粗筛。如果不是,则返回执行步骤s21,以进行新的一次初筛。
101.在进行粗筛之前,控制中心通过步骤s21和步骤s22监测红外监测烟羽浓度信息,并且根据红外监测烟羽浓度信息对经过红外监测区域170内的船舶进行初筛,以将红外监测烟羽浓度信息满足初筛条件的船舶确定为初筛疑似船舶。
102.步骤s23:通过船舶自动识别系统定位当前位于红外监测区域170内的船舶。
103.在进行粗筛之前,通过步骤s23定位经过红外监测区域170的船舶,以实时定位初筛疑似船舶。
104.步骤s24:通过固定监测设备160监测的固定监测烟羽浓度信息。
105.步骤s25:判断固定监测烟羽浓度信息是否满足粗筛条件。如果是则执行后续步骤,以进行精筛。否则返回执行步骤s24,以进行新的一次粗筛。
106.在进行初筛之后,控制中心通过步骤s24和步骤s25监测固定监测烟羽浓度信息,以及根据固定监测烟羽浓度信息对经过固定监测区域150内的初筛疑似船舶进行粗筛,以将固定监测烟羽浓度信息满足粗筛条件的初筛疑似船舶确定为粗筛疑似船舶。
107.步骤s26:通过移动监测设备180监测船舶烟羽浓度信息。
108.步骤s27:判断船舶烟羽浓度信息是否满足精筛条件。如果是则执行后续步骤s28,否则返回执行步骤s26,以进行新的一次精筛。
109.步骤s28:将满足精筛条件的船舶确定为超标船舶。
110.在进行粗筛之后,控制中心通过步骤s26、步骤s27与步骤s28监测船舶烟羽浓度信息,以及根据船舶烟羽浓度信息对粗筛疑似船舶进行精筛,以将船舶烟羽浓度信息满足精筛条件的粗筛疑似船舶确定为超标船舶。
111.本发明已经通过上述实施例进行了说明,但应当理解的是,上述实施例只是用于
举例和说明的目的,而非意在将本发明限制于所描述的实施例范围内。此外本领域技术人员可以理解的是,本发明并不局限于上述实施例,根据本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。本发明的保护范围由附属的权利要求书及其等效范围所界定。
112.除非另有定义,本文中所使用的技术和科学术语与本发明的技术领域的技术人员通常理解的含义相同。本文中使用的术语只是为了描述具体的实施目的,不是旨在限制本发明。本文中出现的诸如“部件”等术语既可以表示单个的零件,也可以表示多个零件的组合。本文中出现的诸如“安装”、“设置”等术语既可以表示一个部件直接附接至另一个部件,也可以表示一个部件通过中间件附接至另一个部件。本文中在一个实施方式中描述的特征可以单独地或与其它特征结合地应用于另一个实施方式,除非该特征在该另一个实施方式中不适用或是另有说明。
113.本发明已经通过上述实施方式进行了说明,但应当理解的是,上述实施方式只是用于举例和说明的目的,而非意在将本发明限制于所描述的实施方式范围内。本领域技术人员可以理解的是,根据本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1