体外诊断系统的装置和操作方法与流程
1.本公开涉及一种用于体外诊断系统的装置和一种用于操作的方法。
背景技术:
2.体外诊断系统适用于测试样本,诸如从人体获取的血液或组织样本。体外诊断可以检测疾病或其他状况,并可以用来监测人的整体健康状况,以帮助治愈、治疗或预防疾病。体外诊断也可以应用于精密医学中,以识别可能从特定治疗或疗法中受益的患者。一些体外诊断测试用于实验室或其他健康专业机构。
3.从文献us 2016/0025756 a1中已知用于体外诊断机构中的系统和方法。该系统包括:自动化轨道,配置为沿着自动化轨道运载多个样本容器的多个载体,以及包括多个光学装置的表征站。与表征站通信的处理器被配置为分析图像以自动表征与每个载体和/或样本容器有关的物理属性。一种方法包括从表征站的多个光学装置接收多个图像,其中,多个图像包括来自由载体运输的样本容器的多个视角的图像,使用处理器自动分析多个图像以确定样本容器的某些特征,并自动将样本容器的特征与数据库中的载体相关联。
4.根据us 2016/0025756 a1,将样本容器放置在载体内可影响样本容器可检测特征(诸如光学可检测特征)的可见性。例如,样本槽的一部分视图可能被载体的保持元件(诸如将样本容器保持在槽中的尖齿)遮挡。将样本容器保持在载体中的尖齿可以基本上向上延伸到每个样本容器的侧面。通常,条形码可以以手工固定到样本容器的壁的贴纸的形式放置。尽管条形码可以围绕每个样本容器的大部分圆周延伸,但是尖齿或另一保持或支撑元件可以使该条形码的很大一部分遮挡,从而提供了盲点。
5.根据us 2016/0025756 a1,通过将样本容器移至载体中的另一个样本槽来消除盲点。当将样本容器放置在载体中时,样本处理机器人将查看并考虑条形码在样本容器上的位置,并自动选择多槽载体内的位置,在该位置处,槽的构造和条形码的取向提供表征站内摄像机不受遮挡的视线。通过将样本容器从载体中的一个槽更换为另一个槽,提供这样不受遮挡的视线。这需要对样本容器进行复杂的处理,包括以下步骤:取出样本容器,在将样本容器移至新槽时保持该样本容器,并将样本容器置于载体中的新槽中。
技术实现要素:
6.本公开的一个目的是提供一种用于体外诊断系统中的装置和一种用于操作的方法,其支持容纳在自动化轨道的载体中的样本容器的可靠和且安全的处理。
7.为了解决该问题,提供了一种根据权利要求1所述的用于体外诊断系统的装置。此外,提供了一种根据权利要求9所述的用于操作体外诊断系统中的装置的方法。在从属权利要求中公开了进一步的实施例。
8.根据一个方面,提供了一种用于体外诊断系统的装置,该装置包括:自动化轨道;多个载体,该多个载体被配置为沿着自动化轨道运载一个或多个样本容器,其中,一个或多个样本容器每者均设有数据载体;以及沿自动化轨道放置的控制站。该控制站设有以下:摄
像装置,该摄像装置被配置为从容纳在来自多个载体的载体中的一个或多个样本容器检测样本容器的图像,该图像示出了至少部分设置在样本容器上的数据载体;数据载体读取器,该数据载体读取器被配置为通过读出窗口读取由载体运载的样本容器上的数据载体,其中,读出窗口由至少部分地被载体的结构构件包围的载体的开口提供;重定位装置,该重定位装置被配置为响应于控制数据而将样本容器重定位在载体上;以及与摄像装置通信的控制装置。该控制装置被配置为:当样本容器位于起始位置时,提供指示样本容器上的数据载体的测量特征的测量数据,该测量特征由摄像装置检测到的图像确定;当样本容器位于起始位置时,当检测到图像时,提供指示由载体的结构构件遮挡了数据载体的一部分的遮挡数据;从测量数据和遮挡数据,确定不同于所测量的特征并包括数据载体在样本容器上的位置以及数据载体的大小的数据载体的特征;并基于数据载体的特征提供控制数据,该控制数据被配置为将样本容器相对于读出窗口从起始位置重定位到读出位置,从而提供最佳的可见性,以用于由数据载体读取器通过读出窗口读取数据载体。
9.根据另一方面,提供了一种操作体外诊断系统中的装置的方法。该方法包括:提供自动化轨道;提供沿着该自动化轨道运载一个或多个样本容器的多个载体,其中,该一个或多个样本容器各自设有数据载体;以及操作沿着该自动化轨道放置的控制站。控制站的操作包括以下:由摄像装置从容纳来自多个载体的一个载体中的一个或多个样本容器检测样本容器的图像,该图像至少部分示出设置在样本容器上的数据载体;由数据载体读取器通过读出窗口读取由载体运载的样本容器上的数据载体,其中,读出窗口由至少部分地被载体的结构构件包围的载体的开口提供;响应于控制数据,由重定位装置将样本容器重定位在载体上;并提供与摄像装置和重定位装置通信的控制装置。在控制装置中,该方法进一步包括:当样本容器位于起始位置时,提供指示样本容器上的数据载体的测量特征的测量数据,该测量特征由摄像装置检测到的图像确定;当样本容器位于起始位置时,当检测到图像时,提供指示由载体的结构构件遮挡了数据载体的一部分的遮挡数据;从测量数据和遮挡数据,确定不同于所测量的特征并包括数据载体在样本容器上的位置以及数据载体的大小的数据载体的特征;并基于数据载体的特征提供控制数据,该控制数据被配置为将样本容器相对于读出窗口从起始位置重定位到读出位置,从而提供最佳的可见性,以用于由数据载体读取器通过读出窗口读取数据载体。
10.在控制装置中,在预备步骤中,提供测量数据,该测量数据指示设置在样本容器上的数据载体的测量特征。然而,数据载体的一部分被载体的结构构件或元件遮挡,从而导致一个或多个盲点。通过遮挡数据提供有关此类遮挡的信息。随后,可以通过处理或分析测量数据和遮挡数据来确定数据载体的实际特征,从而“校正”所测量的特征(包括数据载体的遮挡部分(盲点))。在确定了数据载体的(校正的)特征之后,可以生成控制数据,以用于相对于读出窗口重定位样本容器或将样本容器移动到读出位置,在该位置中,提供了用于由数据载体读取器通过读出窗口读取数据载体的优化或改善的可见性(视线)。可以避免对数据载体的误读或误解。可以在体外诊断系统的装置中更安全地处理样本容器。
11.响应于控制数据,载体中的样本容器被重定位或移动。例如,可以通过样本容器在容纳开口内的旋转来提供重定位,在该开口中,样本容器在起始位置和读出位置都被容纳在其中。响应于控制数据,样本容器的重定位或移动提供了数据载体中运载的样本容器相对于读出窗口的相对运动。样本容器的重定位可以例如在由摄像装置拍摄图像时沿着测量
(视线)的方向(视野)在读出窗口和数据载体之间提供优化的重叠。
12.可以通过具有圆形或正方形形状的开口来提供读出窗口。可以提供狭缝开口。
13.数据载体可以包括一维条形码、二维条形码、三维条形码、矩阵条形码和qr码中的至少一者。可替代地,数据载体可以由rfid标签(rfid-射频标识)提供。可以将数据载体读取器设置为被配置为读出一种或多种类型的数据载体的扫描仪装置。
14.该控制装置可以进一步被配置为:通过考虑指示选自以下组的结构构件的至少一个特征的结构构件数据来确定遮挡数据:结构构件的大小,结构构件的形状,结构构件在载体上的位置,遮挡区域的大小(盲点)和遮挡区域的形状。遮挡数据包括关于结构构件的特征的信息。从而,可以进一步改善数据载体的特征的确定。例如,可以分析数据载体上的盲点的形状和关于结构构件的形状的数据,以用于确定数据载体的特征(针对盲点进行校正)。可以更正确地确定数据载体的特征。作为响应,可以以更高的精度施加样本容器在载体中的重定位或对准。例如,可以通过数字图像分析从图像导出结构构件数据。可替代地或另外地,可以从数据库提供结构构件数据,该数据库包括指示载体和/或整个载体的一个或多个结构构件的特征的电子数据。
15.可以通过载体的开口来提供读出窗口,该载体的开口至少部分地被载体的壁构件和设置用于将样本容器固定/支撑在载体上的固定或支撑构件中的至少一者包围。例如,固定构件可以设置为将样本容器保持或支撑在载体中的指状元件。固定构件可以为柔性固定构件,其可以响应于所施加的一些力而柔性地弯曲。
16.从由摄像装置检测到的图像确定的数据载体的测量特征,对于数据载体,可以指示样本容器中的测量大小和测量位置中的至少一者。在确定数据载体的特征的过程中,可以对测量的大小和测量的位置中的至少一者进行校正或修正,从而为样本容器上的数据载体提供校正的大小和/或校正的位置。
17.控制装置可以进一步被配置为提供窗口数据,该窗口数据指示从以下组中选择的读出窗口的至少一个特征:读出窗口的大小,读出窗口的形状,载体上的读出窗口的位置以及读出窗口相对于数据载体读取器的位置。例如,关于读出窗口的大小/形状,窗口数据可以指示设有第一尺寸的读出窗口的第一窗口范围和设有第二尺寸的读出窗口的第二窗口范围,第二尺寸不同于第一尺寸。在重定位样本容器的过程中(在容纳样本容器的槽内),可以针对第一和第二窗口范围中的一者优化数据载体的可见性。例如,数据载体可以相对于第一或第二窗口范围集中定位。
18.例如,窗口数据可以用于确定要由数据载体读取器读出的数据载体与读出窗口之间的改善的重叠。在实施例中,数据载体可以设置在相对于处于读出位置的读出窗口的中心位置。可以规定,在读出位置,由数据载体读取器通过读出窗口(仍然)看不到数据载体的边界或边缘区域。然而,通过响应于控制数据相对于读出窗口定位数据载体,可以相对于读出窗口将优化的读出定位应用于数据载体。由于考虑到遮挡数据,因此优化了这种定位,从而避免了对数据载体的不正确读取。
19.控制装置可以进一步被配置为从测量数据、遮挡数据和窗口数据确定数据载体的特征。
20.控制装置可以被配置为通过考虑指示来自以下组的结构构件的装置的至少一个特征的数据来确定遮挡数据:结构构件的数量,所选择的可能遮挡数据载体的一部分的结
构构件的标识;以及结构构件之间的距离。例如,指示装置的特征的数据可以提供关于结构构件的装置中的相邻结构构件的信息。
21.上面关于体外诊断系统的装置所公开的实施例可以应用于用于操作经过必要修改的装置的方法。
附图说明
22.接下来,参考附图以示例的方式描述实施例。在附图中示出:图1为用于体外诊断系统的装置的自动化轨道的示意图;图2为用于体外诊断系统中的控制站的装置的示意图;图3为容纳在载体的槽中的样本容器的示意图;图4为容纳在载体的槽中的样本容器的另一示意图;以及图5为设置为具有不同设计的保持指状件的载体的多个不同结构构件。
具体实施方式
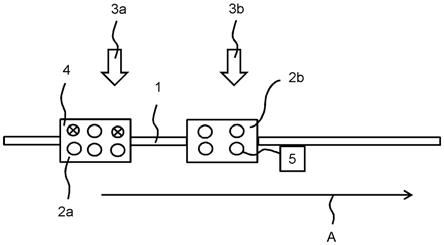
23.图1示出了用于体外诊断系统的装置的自动化轨道1的示意图。例如,可以在体外诊断系统中提供自动化轨道1,该体外诊断系统适用于测试样本,诸如从人体获取的血液或组织样本。体外诊断测试可以在实验室或其他卫生专业机构中使用。
24.自动化轨道1设有多个载体2a、2b,其可沿自动化轨道1在图1中的箭头a所示的方向上移动。通过沿着自动化轨道1移动载体2a、2b,载体2a、2b可以被移动到体外诊断系统的不同的处理或操作站3a、3b。在不同的处理站或操作站3a、3b中,可以将多个施加步骤施加到容纳在载体2a、2b的槽5中的样本容器4。例如,可以对设置在操作站3b中的样本容器4中的一个样本容器中的样本适用光学分析。由此,已知设有自动化轨道的体外诊断系统的不同装置。
25.图2示出了控制站20的示意图。控制站20设有摄像装置21,该摄像装置21被配置为检测容纳在载体2a中的样本容器4的图像。该图像至少部分地示出了设置在样本容器4上的数据载体。数据载体(另请参见下面的图3和图4)用于提供有关样本容器4的信息,例如,生成日期、原产地和/或样本内容。数据载体可以设有以下中的至少一者:一维条形码,二维条形码,三维条形码,矩阵条形码和qr码。而且,可以提供rfid标签。
26.可以通过数据载体读取器22,例如通过扫描仪装置来读出设置在数据载体上的信息。数据载体读取器22被配置为通过读出窗口30(参见图3和图4)来读出样本容器4上的数据载体。在替代示例中,数据载体读取器22可以由摄像装置21实现。
27.摄像装置21和数据载体读取器22与设置在控制站20中的控制装置23通信。控制装置23被配置为生成控制数据,该控制数据被提供给连接至控制装置23的重定位装置24。重定位装置24被配置为将样本容器4重定位在载体2a中。例如,通过在槽5内旋转样本容器4来施用这种重定位或移动,从而将样本容器4从第一位置重定位到读出位置,这提供了容纳在样本容器4上的改善的数据载体的可见性(视线),以用于通过数据载体读取器22读出关于数据载体的信息。
28.图3和图4示出了容纳在载体2a的槽5中的样本容器4的示意图。在图3和图4中的左手侧,设置在样本容器4上的数据载体30被载体2a的结构构件31部分地遮挡。由于这种盲
点,当样本容器4位于图3和4中左手侧所示的第一位置时,通过数据载体读取器22无法正确读出数据载体30。在图3中,读出窗口40的一侧被结构构件31限制,该结构构件31被设置为用于将样本容器4保持或支撑在载体2a中的指状件。在图4中,读出窗口40在两侧被结构构件41a、41b限制。在图4中,数据载体30设置在相对于读出窗口40的中心位置。在图3中,读出窗口的一侧是敞开的(没有被某些结构构件包围)。
29.通过旋转使样本容器4重定位,以用于使样本容器4移动到图3和图4中的右手侧所示的第二位置(读出位置),从而将数据载体30定位在相对于读出窗口40的位置,从而提供了改善的数据载体的可见性,以用于用数据载体读取器22进行读取。
30.当数据载体2a移动到控制站20时,应用用于改变数据载体30相对于读出窗口40(图3和4中所示)的相对位置的过程。样本容器4的图像由摄像装置21收集。在控制站23中,通过数字图像分析来处理图像。提供测量数据,该数据指示样本容器4上的数据载体30的测量特征,样本容器4处于第一位置或起始位置(图3和图4中的左手侧)。在控制装置23中,提供了遮挡数据,该遮挡数据指示通过载体2a的结构构件31、41a、41b遮挡数据载体30的一部分(盲点)。例如,可以通过考虑指示出选自以下组的结构构件31、41a、41b的至少一个特征的结构构件数据来确定遮挡数据:结构构件的侧面,结构构件的形状,结构构件在载体2a上的位置,遮挡区域(盲点)的侧面以及遮挡载体的形状。
31.为了确定不同于测量的特征并且包括数据载体30在样本容器4上的位置和数据载体30的大小的数据载体30的校正特征,可以考虑遮挡数据。基于数据载体30的特征,通过控制装置23生成控制数据,以用于使样本容器4相对于读出窗口40从第一位置(参见图3和图4中的左手侧)重定位到图3和4中右手侧所示的第二或读出位置。在重定位的过程中,样本容器4保持在槽5中,但相对于读出窗口40旋转以进行相对运动。
32.可以将载体2a、2b的结构构件41a、41b设置为结构元件的装置,例如,多个尖齿或指状件,该多个结构构件具有相同或不同的设计。图5示出了这种结构元件的多个设计选项。
33.关于确定遮挡数据,可以应用以下方面。例如,如果遮挡摄像装置21的视野的结构构件31、41a、41b的形状为矩形的,则可以识别出结构构件31、41a、41b的形状。然后,可以通过从摄像装置21所拍摄的图像中进行特征提取来检测该矩形形状,例如基于霍夫变换或边缘检测。
34.与样本容器4相比,可以通过颜色或亮度差来识别诸如指状件或尖齿的结构构件31、41a、41b。可替代地或另外地,可以识别通过摄像装置21可以检测到的在结构构件31、41a、41b上的特殊标记,诸如在结构构件的外部上的特定颜色标记、特定形状、特定图案和/或特定符号。
35.可替代地或附加地,可以考虑载体2a、2b的主体或壳体的特殊标记。
36.对于结构构件31、41a、41b的装置的已知设计,例如图5中所示的一个设计,可以在控制站20中应用的过程中识别出各方面。可以施用已知数量的结构构件以及结构构件之间的距离来估算遮挡样本容器的结构构件的最可能位置。
37.所提到的实施例中的一个或多个实施例可以应用于提高整个结构构件位置检测过程的可靠性。
38.如果已经通过前述方法之一在由摄像装置21拍摄的图像中识别出几个用于识别
为载体2a、2b的结构构件的候选,则结构构件41a、41b之间的距离以及结构构件41a、41b的数量的知识可以用于确定那些候选中的哪些实际上可能为诸如指状件或尖齿的结构构件。例如,如果两个候选的距离小于实际结构构件距离,则可以排除其中一个。在另一个示例中,如果候选的数量大于结构构件的实际数量,则其中一个实际上不能成为结构构件。
39.而且,可以存在并考虑具有相等且已知距离的结构构件形状的图案,可选地包括在载体2a、2b的结构构件和/或壳体上的特征或特殊标记的图案。这样的结构构件数据可以与在控制装置23中由摄像装置21拍摄的图像中提取的一组特征匹配。最佳匹配将为结构构件给出最可能的位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1