一种预应力筋应力检测方法与流程
1.本发明涉及一种预应力检测技术领域中的预应力筋有效应力检测方法。
背景技术:
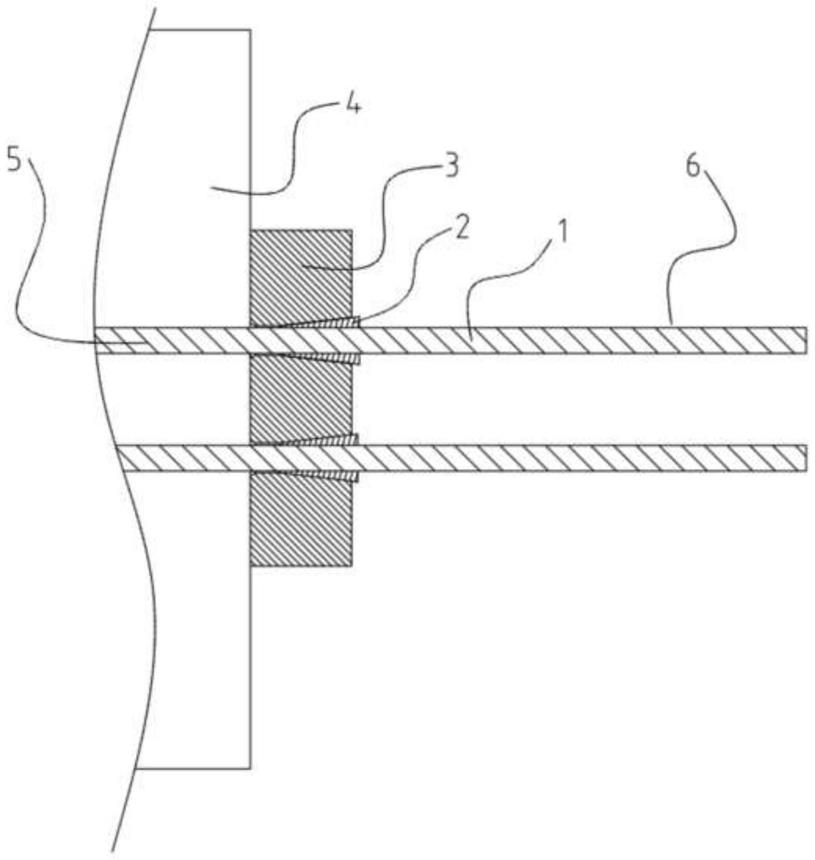
2.预应力施工工艺在公路水运中应用广泛,它是影响施工质量的关键因素。预应力施工的一般结构如图1所示:预应力筋6(通常为钢绞线)穿过相应混凝土4(或箱梁等部件),预应力筋通过工作锚片2与锚板3相连,有效应力即指穿设于混凝土内的这一段预应力筋因弹性变形而产生的拉力,其等于锚板对锚片的挡止力,为方便说明问题,在本发明中将穿设于混凝土内的这一段预应力筋称为工作锚片内侧的预应力筋5,将穿设于混凝土外的这一段预应力筋称为工作锚片外侧的预应力筋1。
3.现有技术中通常采用反拉法来对有效应力进行检测,其过程为通过张拉装置对预应力筋的端部进行张拉,通过一个位移传感器记录张拉装置动作端的位移变化s,通过测力传感器记录张拉装置对预应力筋的作用力f,其中s与f的关系如图2所示:张拉机构在对预应力筋的端部张拉时,测力传感器显示的曲线大致分为三段,即oa段、ab段和dc段,oa为只有工作锚片外侧预应力筋参与张拉的第一稳态段,dc为工作锚片外侧预应力筋和工作锚片内侧预应力筋均参与张拉的第二稳态段,ad段是连接于第一稳态段与第二稳态段间的非稳态段,其中oa段表示张拉力f小于预应力筋的有效应力f1,只有工作锚片外侧的预应力筋参与张拉过程,ab段的起点a表示张拉力f与有效应力f1相同时,随后随着f的增加,工作锚片具有向外的驱动趋势,工作锚片与锚板之间产生摩擦力f2,f=f1+f2,因此ab段的斜率大于oa段的斜率,在b点时,工作锚片与锚板脱离,f2消失,随后继续张拉过程中,工作锚片内侧的预应力筋也参与到张拉过程,参与张拉的预应力筋的长度增加,因此dc段的斜率小于oa段的斜率。
4.现有这种检测方法存在的问题在于:预应力筋的真正有效应力值应该是a点所对应的力值,但是摩擦力f2值的参与对整个曲线曲率影响不是特别大,因此ab 段的斜率与oa段的斜率差别并不太大,因此a点从位移力关系图上并不太好找,现有技术中通常的做法是,如果不考虑f2对有效应力测量的影响,则选b 点所对应的力值作为有效应力,如果考虑f2对有效应力测量的影响,则选择d 点所对应的力值作为有效应力,无论选取b点还是d点,其有效应力值与真实的a点有效应力值均是有差异的,也就是说现有技术中,无法准确的获得预应力筋的有效应力值。
技术实现要素:
5.本发明的目的在于提供一种预应筋应力检测方法,以解决现有技术无法准确获得预应筋有效应的技术问题。
6.为解决上述技术问题,本发明中的技术方案如下:
7.一种预应力筋应力检测方法,该方法包括以下步骤,第一步,张拉装置的张拉结构对工作锚片外侧的预应力筋进行张拉,使工作锚片与锚板脱离;第二步,减小张拉装置的输
出张拉力f
外
,张拉结构朝锚板移动过程中,工作锚片朝向锚板移动,第一位移传感器测量张拉结构的位移变化,通过测力传感器测量输出张拉力f
外
,得到该过程中f
外
与s的直线方程,y=kx+b(1),式(1)中x 对应横坐标s,y对应纵坐标f
外
;第三步,工作锚片与锚板接触直至工作锚片被锚板挡止而停止移动,记录此时的s值,将该s值带入式(1),求得y即为预应力筋的有效应力。
8.张拉装置包括装置架和具有丝杠、丝母的丝杠丝母传动机构,丝杠上设置有供相应预应力筋穿过的预应力筋穿孔,丝杠、丝母中的一个部件为与所述装置架转动配合的扭矩输入端,另外一个部件为与所述装置架止转导向配合的直线动作输出端,张拉装置还包括与所述扭矩输入端传动连接的电机动力机构,张拉结构设置于直线动作输出端上。
9.第一位移传感器设置于所述张拉结构上以检测张拉结构相对于锚板的位移变化。
10.张拉结构包括与所述直线动作输出端同轴线螺纹连接的施力拉套,施力拉套具有锥形内孔,锥形内孔中设置有用于卡紧所述预应力筋的工具锚片。
11.所述丝杠为滚珠丝杆,电机动力机构中的电机为自锁电机。
12.装置架包括上支架臂、下支架臂及连接于上支架臂与下支架臂之间的连接臂,上支架臂、下支架臂和连接臂构成c形结构,下支架臂上设置有供预应力筋穿过的支架穿孔,扭矩输入端转动装配于上支架臂上。
13.装置架包括下侧支架部分和上侧支架部分,下侧支架部分上设置有位于丝杆一侧的支撑杆,装置架还包括铰接于所述支撑杆上端的传力杠杆,传力杠杆的一端与所述下侧支架部分之间通过所述测力传感器相连,传力杠杆的另外一端与所述上侧支架部分铰接相连,扭矩输入端转动装配于所述上侧支架部分上,下侧支架部分上设置有供预应力筋穿过的支架穿孔。
14.装置架包括上下设置的上侧支架部分和下侧支架部分,扭矩输入端转动设置于上侧支架部分的中部,测力传感器有两个,两个测量传感器分别连接于上侧支架部分的两端与下侧支架部分的两端之间。
15.装置架为套设于丝杠外外围的套状结构。
16.张拉装置还包括用于检测工作锚片相对锚板位移变化的第二位移传感器。
17.本发明的有益效果为:本发明中针对工作锚片与锚板接触后产生摩擦力而影响测力稳定性的问题,提出了先对预应力筋进行张拉,然后再利用预应力筋回弹而使得工作毛片与锚板挡止的方案,在回弹过程中,工作锚片未与锚板接触时,f
外
=f
内
,f
内
表示工作锚片内侧的预应力筋所产生的拉力,工作锚片内侧和预应力筋和工作锚片外侧的预应力筋同时参与变形,没有摩擦力的介入,复合正常弹性体的形变规律,根据胡克定律,可以形成稳定的线性曲线,从而得到该过程中f
外
与s的直线方程,y=kx+b(1),随后工作锚片与锚板接触而有摩擦力产生,f
外
与s的关系曲线不再稳定,但是当工作锚片被锚板挡止的瞬间,f
内
=f
有
=f
外
,f
有
表示预应力筋的有效应力,工作锚片与锚板之间的相对运动趋势消失,摩擦力的影响消失,因此在该时刻f
外
与s的关系与y=kx+b一致,可以直接越过摩擦力影响的那一段,通过s值求得对应的f
外
,即预应力筋的有效应力。
附图说明
18.图1是本发明背景技术中预应力施工的结构示意图;
19.图2是本发明背景技术中张拉力f与张拉位移s的关系图;
20.图3是本发明中有效应力检测方法的实施例1中输出张拉力f
外
与张拉结构的位移变化s之间的关系图;
21.图4是有效应力检测方法的实施例1中张拉装置与预应力筋的配合示意图;
22.图5是有效应力检测方法的实施例2中张拉装置与预应力筋的配合示意图;
23.图6是有效应力检测方法的实施例3中张拉装置与预应力筋的配合示意图;
24.图7是有效应力检测方法的实施例4中张拉装置与预应力筋的配合示意图;
25.图8是有效应力检测方法的实施例5中张拉装置的结构示意图。
具体实施方式
26.本发明中预应力筋应力检测方法的实施例1如图3~4所示:
27.该方法包括以下步骤,第一步,张拉装置的张拉结构对工作锚片外侧的预应力筋进行张拉,使工作锚片与锚板脱离;第二步,减小张拉装置的输出张拉力f 外
,张拉结构朝锚板移动过程中,工作锚片朝向锚板移动,第一位移传感器测量张拉结构的位移变化,通过测力传感器测量输出张拉力f
外
,得到该过程中f
外
与s的直线方程,y=kx+b(1),式(1)中x对应横坐标s,y对应纵坐标f
外
;第三步,工作锚片与锚板接触直至工作锚片被锚板挡止而停止移动,记录此时的s值,将该s值带入式(1),求得y即为预应力筋的有效应力。
28.如图3所示,ab段直线即对应直线方程y=kx+b,b点对应工作锚片回弹过程中开始与锚板接触的时刻,c点对应工作锚片被锚板挡止而不能继续移动的时刻,虚拟点d的横坐标与c点相同,其处于ab段的延长线上,d点的纵坐标即为预应力筋的有效应力。在实际测试过程中,ab段的斜线方程中的x通过第一位移传感器测得,y通过测力传感器获得,因此任意选择两组数据可求得直线方程的k和b值。
29.张拉装置包括装置架8和具有丝杠3、丝母2的丝杠丝母传动机构,装置架 8包括上支架臂1、下支架臂9及连接于上支架臂1与下支架臂9之间的连接臂 7,上支架臂、下支架臂和连接臂构成c形结构,下支架臂9上设置有供预应力筋4穿过的支架穿孔。丝母2转动装配于上支架臂1上,丝母2构成用于扭矩输入的扭矩输入端,丝杠3构成与装置架止转导向配合的直线动作输出端,丝杠上设置有供预应力筋穿过的预应力筋穿孔14,张拉装置还包括电机动力机构,电机动力机构包括电机,电机与丝母传动连接,本实施例中,丝杠为滚柱丝杠,电机为具有无刷自锁电机。丝杠上下端设置有用于与预应力筋连接的预张拉结构,预张拉结构包括与丝杠下端同轴线螺纹连接的施力拉套6,施力拉套6具有锥形内孔,锥形内孔中设置有用于卡紧所述预应力筋的工具锚片5。下支架臂9 的下侧设置有测力传感器10,测力传感器10为环形结构,测力传感器的下侧设置有传力套11,传力套用于顶在锚板上。施力拉套上设置有用于检测直线动作输出端相对锚板之间位移变化的第一位移传感器(图中未示出)。图中项13表示锚板,项12表示用于实现预应力筋与锚板连接的工作锚片。
30.使用时如图4所示,预应力筋依次穿过传力套、测力传感器、下支架臂、施力拉套、工具锚片和丝杠,电机动力机构带动丝母旋转,丝母旋转带动丝杠直线动作,施力拉套通过工具锚片夹紧预应力筋从而实现对预应力筋进行张拉。丝杠与丝母的传动较为高效,同时也避免了液压结构体积大、成本高、重量大和使用不便的问题。预应力筋穿设于丝供的预应力筋穿孔中,有效的减小了整个产品的尺寸。
31.在本发明的其它实施例中,丝杠也可以与装置架转动配合,此时丝杠构成丝杠丝母机构的扭矩输入端,丝母与装置架止转导向配合,丝母构成丝杠丝母机构的直线动作输出端,预张拉结构直接与丝母相连;预应力筋拦截结构也可以不是工具锚片、施力拉套结构,比如说通过其它夹紧固定结构,只有能够实现对预应力筋拉拽时,预张拉结构与预应力筋之间不产生相对滑移即可;滚珠丝杠还可以被梯形丝杠代替,当采用梯形丝杠时,因梯形丝杠局部停机自锁能力,因此电机不需具有自锁功能;张拉装置也可以采用现有技术中的液压张拉装置。
32.应力检测方法的实施例2如图5所示:实施例2与实施例1不同的是,本实施例中的张拉装置的装置架与实施例1中张拉装置的装置架结构不同,装置架8为套设于丝杠外围的套状结构,丝母2转动装配于装置架8上端,装置架的上端具有与丝杠止转导向配合的装置架内孔。
33.应力检测方法的实施例3如图6所示,实施例3与实施例1不同的是,装置架包括下侧支架部分16和上侧支架部分17,下侧支架部分上固定有位于丝杠 3一侧的支撑杆19,装置架还包括铰接于支撑杆19上端的传力杠杆18,传力杠杆18的一端与下侧支架部分16之间通过测力传感器10相连,测力传感器10 的上端与传力杠杆18铰接相连,测力传感器的下端与下侧支架部分17铰接相连。传力杠杆18的另外一端与上侧支架部分17铰接相连,扭矩输入端转动装配于所述上侧支架部分上,下侧支架部分16上设置有供预应力筋穿过的支架穿孔,使用时,下侧支架部分可以直接顶在锚板13上。本方案中测力传感器位于丝杠的一侧,并不与丝杠同轴线布置,通过传力杠杆18传力,来实现对张拉力的检测。
34.应力检测方法的实施例4如图7所示,实施例4与实施例3不同的是,装置架8的上侧支架部分7和下侧支架部分16采用左右对称结构,扭矩输入端转动设置于上侧支架部分的中部,测力传感器有两个10,两个测量传感器分别连接于上侧支架部分的两端与下侧支架部分的两端之间,测力传感器的上端与上侧支架部分铰接相连,测力传感器的下端与下侧支架部分铰接相连。
35.应力检测方法的实施例5如图8所示,实施例5与实施例1不同的是,在本实施例中,除了设置有用于检测直线动作输出端相对锚板之间位移变化的第一位移传感器20,还设置有用于检测工作锚片12相对锚板13之间位移量的第二位移传感器21。第一位移传感器设置于施力拉套6上。
36.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1