一种针对断控体的数据驱动速度建模方法及系统与流程
1.本发明涉及地球物理勘探地震资料的处理、解释领域,尤其涉及一种针对断控体的数据驱动速度建模方法及系统。
背景技术:
2.随着勘探开发面临的地质目标越来越复杂,例如以断控油气藏为主的塔里木盆地顺北油气田,发育着大量走滑断裂,具有方向性强、断距小、断裂破碎带内部速度低的特点,这种与方位相关的小尺度低速异常目标很难通过常规的速度反演技术获得,即使是现有的高精度建模技术,也无法处理这种速度的方向性变化,导致该地区断溶体成像的精度有限,也影响了后续断裂解释、储层预测及圈闭评价的准确度,制约着该地区地质难题的解决。
3.常规的深度域速度建模技术只能反演出中长波长的速度变化,反演的精度非常有限,即使是高精度的多信息约束深度域建模技术,也只是通过增加一定的约束和控制,在地质认识的指导下适当的减小反演尺度,此类技术并非纯数据驱动,受人为因素影响较大,应用效果与建模人员对地质现象的认识和理解密切相关,所建模型很难有统一的标准,应用过程需要非常小心谨慎。
4.目前,面临速度沿一定方向分布的特殊异常地质体时,常规基于offset道集的速度反演技术,均未考虑方向性的速度变化,反演的结果体现的是对各个方位的平均和平滑效应。
技术实现要素:
5.本发明的特征和优点在下文的描述中部分地陈述,或者可从该描述显而易见,或者可通过实践本发明而学习。
6.为克服现有技术的问题,本发明提供一种针对断控体的数据驱动速度建模方法,包括:
7.s1、将叠前道集进行ovt域叠前深度偏移,形成ovg道集;
8.s2、将所述ovg道集分为多组ovg子道集,并单独对每个所述ovg子道集进行剩余时差拾取并建立层析方程;
9.s3、通过多组所述层析方程获得高精度的模型更新量;
10.s4、更新速度模型,进行深度域偏移成像。
11.可选地,所述步骤s1之前,包括:
12.对叠前道集进行优化处理,所述优化处理包括去噪和/或多次波压制。
13.可选地,所述步骤s1包括:
14.利用常规速度建模获得的最佳模型,对优化处理后的叠前道集进行ovt域叠前深度偏移,并对其ovt域成像道集,按偏移距和方位角分选形成ovg道集。
15.可选地,所述步骤s2中进行剩余时差拾取时包括:通过对拾取的剩余时差与相应的ovg子道集叠合显示,质控拾取的质量,确保所拾剩余时差的准确性。
16.可选地,所述步骤s2中,基于不同方位的剩余时差分别建立层析方程。
17.本发明提供一种针对断控体的数据驱动速度建模系统,包括:
18.道集建立模块,用于将叠前道集进行ovt域叠前深度偏移,形成ovg道集;
19.分组层析方程建立模块,用于将所述ovg道集分为多组ovg子道集,并单独对每个所述ovg子道集进行剩余时差拾取并建立层析方程;
20.更新量获取模块,用于通过多组所述层析方程获得高精度的模型更新量;
21.成像模块,用于更新速度模型,进行深度域偏移成像。
22.可选地,进一步包括优化处理模块,用于对叠前道集进行优化处理,所述优化处理包括去噪和/或多次波压制。
23.可选地,所述道集建立模块用于:利用常规速度建模获得的最佳模型,对优化处理后的叠前道集进行ovt域叠前深度偏移,并对其ovt域成像道集,按偏移距和方位角分选形成ovg道集。
24.可选地,所述分组层析方程建立模块用于:
25.通过对拾取的剩余时差与相应的ovg子道集叠合显示,质控拾取的质量,确保所拾剩余时差的准确性;
26.基于不同方位的剩余时差分别建立层析方程。
27.本发明提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行的至少一个程序,所述至少一个程序被所述计算机执行时使所述计算机执行上述所述的方法中的步骤。
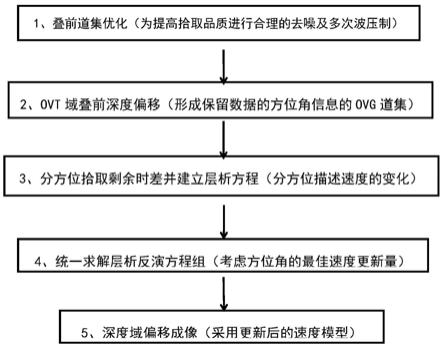
28.本发明以针对性的道集优化处理为基础,结合前期常规叠前深度偏移已有的最佳速度模型,完成ovt域叠前深度偏移,再对其成像道集进行方位角划分,保留住道集中的方位角信息,然后分方位拾取剩余曲率,获得不同方位道集的不同剩余时差,从而建立出不同方位的层析方程组,再进行联合层析反演,获得与地质异常体速度变化相关的速度模型更新量,有利于提高深度域偏移成像精度。
29.本发明是针对该地区的高精度速度反演技术,有助于提高速度模型反演精度,更加精细地反演出断裂带的方向性速度变化,提升奥陶系目的层断溶体成像精度,同时为精细储层解释提供更为准确的基础数据。
30.通过阅读说明书,本领域普通技术人员将更好地了解这些技术方案的特征和内容。
附图说明
31.下面通过参考附图并结合实例具体地描述本发明,本发明的优点和实现方式将会更加明显,其中附图所示内容仅用于对本发明的解释说明,而不构成对本发明的任何意义上的限制,在附图中:
32.图1为本发明实施例的针对断控体的数据驱动速度建模方法的流程示意图。
33.图2是优化前、五维去噪后及多次波压制后的cmp道集对比图。
34.图3是常规速度反演与针对断控体的数据驱动速度反演的速度模型更新量与地震剖面的叠合对比图。
35.图4是成像效果对比图。
36.图5是成像道集对比图。
37.图6为本发明实施例的针对断控体的数据驱动速度建模系统的结构示意图。
具体实施方式
38.下面结合具体实施例对本发明进行具体的描述,有必要在此指出的是以下实施例只用于对本发明的进一步说明,不能理解为对本发明保护范围的限制,本领域技术人员根据本发明内容对本发明做出的一些非本质的改进和调整仍属本发明的保护范围。
39.本发明采用叠前五维的ovt域道集,由于具有限定范围的偏移距和方位角特点,可在成像道集中保留住方位信息,有利于从纯数据驱动的角度反演出与方位相关的速度变化,例如断裂带方向性的速度异常。
40.下面结合附图对本发明作进一步详细描述:
41.如图1所示,本发明提供一种针对断控体的数据驱动速度建模方法,包括步骤:
42.s10、对叠前道集进行去噪、多次波压制等优化处理;
43.针对断溶体成像的速度建模技术,需要以突出弱有效信号的叠前道集为基础,因此需要对道集进行合理优化。首先通过五维去噪技术,可大大提高资料信噪比,增强有效信号的同时,也凸显出多次波类的干扰,然后进一步采用相关多次波去除技术,压制多次波能量,达到增强有效信号的优化处理目的,为下一步速度模型的建立提供良好的基础数据。
44.请同时参照图2,图2是优化前、五维去噪后及多次波压制后的cmp道集对比,可见通过五维去噪,可大幅度提高资料信噪比,再结合多次波压制,可减少多次波对有效能量的影响,实现增强叠前数据有效信号的道集优化处理。
45.s20、将叠前道集进行ovt域的叠前深度偏移,形成ovg道集;
46.利用常规速度建模获得的最佳模型,对优化处理后的叠前道集进行ovt域叠前深度偏移,并对其ovt域成像道集,按偏移距和方位角分选形成ovg道集。
47.s30、将所述ovg道集分为多组ovg子道集,并单独对每个所述ovg子道集进行剩余时差拾取并建立层析方程;
48.根据ovg道集中的方位角信息将其分为多组不同优势方位的ovg子道集,然后对不同方位的ovg子道集进行单独的剩余时差拾取,分别控制拾取范围、拾取密度及曲率范围等,分方位后道集的规律性更好,会更容易拾取。
49.在具体实施时,可以通过对拾取的剩余时差与相应的ovg子道集叠合显示,质控拾取的质量,确保所拾剩余时差的准确性,是下一步精细反演的基础。
50.根据分方位拾取的剩余时差,分别构建出多个不同方位的层析反演方程:
[0051][0052]
其中,a是与方位角相关的射线路径长度,是方位角,δt是从道集中提取的不同方位时的剩余时差,δm是待求解的反演模型更新量。
[0053]
s40、联合求解多方位层析反演方程组,获得高精度的模型更新量;
[0054]
上述不同方位的层析反演方程构成多方位层析反演方程组。对多方位层析反演方程组进行联合求解,更新量包括速度残差。
[0055]
常规层析反演由于未考虑数据的方位角信息,其结果可看作是对各个方位的一种
平滑效应,多信息约束反演则受限于人为因素,好的结果较大程度依赖于地质认识,而本发明从纯数据角度出发,将不同方位不同的剩余时差反应在层析反演方程组中,其反演结果综合反应了不同方位的速度变化情况,可获得与地质异常体速度变化相关的速度模型更新量,实现高精度深度域偏移成像,且更为客观有效。
[0056]
s50、更新速度模型,即把速度模型更新量加到前期最佳的速度模型中进行深度域偏移成像。
[0057]
请参照图3,图3是常规速度反演与针对断控体的数据驱动速度反演的速度模型更新量与地震剖面的叠合对比,本发明技术能够更好地反演出走滑断裂的方向性速度变化。
[0058]
请参照图4,图4是成像效果对比,通过针对断控体的数据驱动速度建模技术,断裂成像精度明显提升,串珠成像更加聚焦,断溶体特征更为清晰,这对断控体储层内幕成像精度的提高有很大帮助。
[0059]
请参照图5,图5是成像道集对比,从常规反演最佳和针对断控体的数据驱动速度反演后的成像道集对比,可见在常规道集已经拉平,无法再迭代后,通过针对断控体的数据驱动速度建模技术还可进一步提升成像道集质量,同相轴连续性更好,微小的细节改善,有利于获得精细的成像效果。
[0060]
本发明提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行的至少一个程序,所述至少一个程序被所述计算机执行时使所述计算机执行上述方法中的步骤。
[0061]
如图6所示,本发明提供一种针对断控体的数据驱动速度建模系统,包括:优化处理模块11、道集建立模块12、分组层析方程建立模块13、更新量获取模块14、成像模块15。
[0062]
优化处理模块11用于对叠前道集进行优化处理,所述优化处理包括去噪和/或多次波压制。更具体地,首先通过五维去噪技术,可大大提高资料信噪比,增强有效信号的同时,也凸显出多次波类的干扰,然后进一步采用相关多次波去除技术,压制多次波能量,达到增强有效信号的优化处理目的。
[0063]
道集建立模块12与优化处理模块11相连,用于将叠前道集进行ovt域叠前深度偏移,形成ovg道集;更具体地,利用常规速度建模获得的最佳模型,对优化处理后的叠前道集进行ovt域叠前深度偏移,并对其ovt域成像道集,按偏移距和方位角分选形成ovg道集。
[0064]
分组层析方程建立模块13与道集建立模块12相连,用于将所述ovg道集分为多组ovg子道集,并单独对每个所述ovg子道集进行剩余时差拾取并建立层析方程。更具体地,根据ovg道集中的方位角信息将其分为多组不同优势方位的ovg子道集,然后对不同方位的ovg子道集进行单独的剩余时差拾取,分别控制拾取范围、拾取密度及曲率范围等,分方位后道集的规律性更好,会更容易拾取。
[0065]
在具体实施时,可以通过对拾取的剩余时差与相应的ovg子道集叠合显示,质控拾取的质量,确保所拾剩余时差的准确性,是下一步精细反演的基础。
[0066]
根据分方位拾取的剩余时差,分别构建出多个不同方位的层析反演方程:
[0067][0068]
其中,a是与方位角相关的射线路径长度,是方位角,δτ是从道集中提取的不同方位时的剩余时差,δm是待求解的反演模型更新量。
[0069]
更新量获取模块14与分组层析方程建立模块13相连,用于通过多组所述层析方程获得高精度的模型更新量;更具体地,对以上多个不同方位的层析反演方程进行联合求解,更新量包括速度残差。常规层析反演由于未考虑数据的方位角信息,其结果可看作是对各个方位的一种平滑效应,多信息约束反演则受限于人为因素,好的结果较大程度依赖于地质认识,而本发明从纯数据角度出发,将不同方位不同的剩余时差反应在层析反演方程组中,其反演结果综合反应了不同方位的速度变化情况,可获得与地质异常体速度变化相关的速度模型更新量,实现高精度深度域偏移成像,且更为客观有效。
[0070]
成像模块15与更新量获取模块14相连,用于更新速度模型,即把速度模型更新量加到前期最佳的速度模型中,进行深度域偏移成像。
[0071]
本发明提供了一种针对断控体的数据驱动速度建模方法及系统,充分利用了ovt域数据的方位角信息,通过分方位独自拾取剩余时差的方式,将不同方位的速度变化带入整体的层析反演中,进而反演出方向性的速度变化特征。该方法从纯数据驱动的角度,反演出断裂带的方向性速度变化,有效提高速度模型精度,其成果能够为精细储层描述、圈闭落实及井位部署提供有效的支撑数据。
[0072]
本发明基于ovt域数据,从纯数据驱动的角度实现了多方位高精度速度反演,得到了随着方位变化速度模型更新量,新的速度模型精度更高,速度变化趋势也更加符合地质认识。采用该技术获得的速度模型进行叠前深度偏移,成像精度得到提高,断裂刻画更为清晰,缝洞体能量更好聚焦,构造形态更加合理,较常规反演的速度模型的深度偏移效果有着很大提升,取得了良好的应用效果。
[0073]
以上参照附图说明了本发明的优选实施例,本领域技术人员不脱离本发明的范围和实质,可以有多种变型方案实现本发明。举例而言,作为一个实施例的部分示出或描述的特征可用于另一实施例以得到又一实施例。以上仅为本发明较佳可行的实施例而已,并非因此局限本发明的权利范围,凡运用本发明说明书及附图内容所作的等效变化,均包含于本发明的权利范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1