自适应调整扫描角度的激光扫描探测装置及方法与流程
[0001]
本发明属于激光探测领域,具体涉及一种自适应调整扫描角度的激光扫描探测装置及方法。
背景技术:
[0002]
激光扫描探测装置是一种可以精确、快速获取目标三维空间信息的主动探测成像系统,由于激光具有的高相干性、方向性、单色性等优点,激光扫描探测装置能够实现远距离、高精度的快速测距功能。激光扫描探测装置主要由发射系统、接收系统、信息处理系统等部分组成,其基本工作原理是通过激光发射器发射激光束探测目标,然后由激光接收器收集被目标反射的光信号,经光电转换、信号放大和处理,通过激光测距技术可以取得目标距离、方位、高度、速度、姿态等信息,信息处理系统对这些信息进行处理,从而对目标进行探测、识别和跟踪。
[0003]
将单点激光测距功能的激光探测装置通过扫描或多元阵列探测的形式扩展到二维,可构建具有成像能力的激光雷达。激光成像雷达可用于探测和跟踪目标,获得目标方位及速度信息等。激光成像雷达通过弹体同轴的直流电机周期性旋转完成一维的扫描过程,通过弹体与目标的相对飞行完成另一维的扫描,从而获得目标的二维图像。相比于普通雷达,激光成像雷达具有更高的分辨率及更远的探测距离,除了在机器人、无人驾驶等热门领域的应用,在军事、海洋探测、航空航天、工业等领域应用也较为广泛,激光成像雷达通过对发射激光束来探测目标的位置,对飞机、潜艇、水雷等目标进行探测,识别和跟踪。
[0004]
郑震在《基于dhgf算法的激光线扫描成像引信目标识别方法》一文中,采用激光线扫描方式完成激光探测成像,根据目标数据序列建立目标识别模型。但由于激光收发频率和旋转速度比例保持不变,这样在探测装置工作时,激光束每次都会射在相同角度的点上,接收的也都是同一角度位置的反馈信息,即在旋转扫描时只能扫描到固定角度点的目标数据信息,其他的角度点的信息则无法获取,而且对存在障碍物的目标环境,运用传统激光扫描装置可能无法获得同一扫描方向上的目标轮廓信息。为了获取更精确的目标特征,需要改变激光扫描目标时扫描线的角度,获取新的扫描角度点上的信息。
技术实现要素:
[0005]
本发明的目的在于提供一种自适应调整扫描角度的激光扫描探测装置及方法,解决了传统激光扫描探测装置固定角度扫描和存在障碍盲区问题。
[0006]
实现本发明目的的技术解决方案为:一种自适应调整扫描角度的激光扫描探测装置,包括角度调整装置、激光扫描探测装置、主控模块和外壳组件,角度调整装置、激光扫描探测装置、主控模块均设置在外壳组件内,角度调整装置和激光扫描探测装置分别与主控模块连接,通过主控模块控制角度调整装置实现旋转电机轴线的角度调整功能,控制激光扫描探测装置实现目标探测与识别功能。
[0007]
一种自适应调整扫描角度的激光扫描探测方法,调整扫描角度步骤如下:
[0008]
步骤1、探测装置开机上电,主控模块向旋转电机、激光发射器和激光接收器发送启动信号,激光发射器持续发射脉冲激光,旋转电机带动发射棱镜和接收棱镜旋转周视扫描目标,激光接收器将获取的回波信号传输给主控模块;
[0009]
步骤2、主控模块根据回波信号解算旋转电机轴线和目标运动方向在垂直投影上的夹角θ;
[0010]
步骤3、主控模块根据旋转电机轴线和目标运动方向在垂直投影上的夹角θ,运用最佳角度模型求解第一步进电机和第二步进电机的最小脉冲数k1和k2;
[0011]
步骤4、通过主控模块分别第一步进电机和第二步进电机发送k1和k2脉冲数,控制角度调整装置中的第一步进电机和第二步进电机旋转相应角度,改变旋转电机轴线的垂直投影方向,改变激光探测装置扫描目标过程中旋转电机转动时形成的扫描线方向,从而改变激光扫描目标方向;
[0012]
步骤5、探测装置重新扫描目标,获得角度调整后的目标回波信号,主控模块生成角度调整后的目标轮廓图像。
[0013]
本发明与现有技术相比,其显著优点在于:
[0014]
(1)在传统激光扫描探测系统上增加角度调整装置,能自动调整扫描镜轴线的方向,改变激光线扫描方向,解决了弹目交汇角度随机的问题,使引战配合效率更高;
[0015]
(2)自动调整激光探测装置投影的扫描线方向,与内部存储的特定目标信息在时序上是一致的,可以直接对特定目标的信息进行处理,减少了目标识别时间,降低了目标数据点丢失的概率,提高了目标识别率。
[0016]
在提取目标特征时弹目交汇角度随机的问题,以使扫描获取的特定目标轮廓与存储的特定目标轮廓的点的个数和位置等数据一致,进而提高目标探测的识别率和探测效率。
附图说明
[0017]
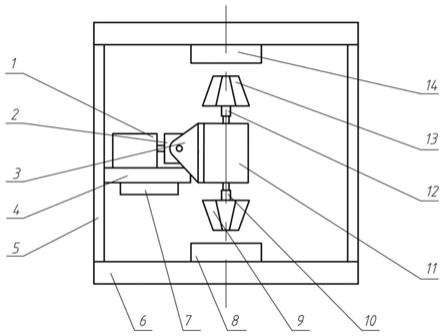
图1为本发明的自适应调整扫描角度的激光扫描探测装置的结构示意图。
[0018]
图2为本发明的自适应调整扫描角度的激光扫描探测方法流程图。
[0019]
图3为电机坐标系o
d
x
d
y
d
z
d
示意图。
[0020]
图4为本发明激光扫描探测过程中调整角度前后扫描目标对比图,其中图(a)为调整角度前扫描目标示意图,图(b)为调整角度后扫描目标示意图。
具体实施方式
[0021]
下面结合附图对本发明作进一步详细描述。
[0022]
结合图1,一种自适应调整扫描角度的激光扫描探测装置,包括角度调整装置、激光扫描探测装置、主控模块7和外壳组件,角度调整装置、激光扫描探测装置、主控模块7均设置在外壳组件内,角度调整装置和激光扫描探测装置分别与主控模块7连接,通过主控模块7控制角度调整装置实现旋转电机11轴线的角度调整功能,控制激光扫描探测装置实现目标探测与识别功能。外壳组件包括透明固定架6、透明罩5、电机支撑架4,透明固定架6作为整个支撑部件,透明固定架6的两端封闭,四周通过透明罩5包裹密封,电机支撑架4一端固定在透明罩5内壁,主控模块7固定在电机支撑架4底面。角度调整装置包括第一步进电机
1、第二步进电机2、连接块3,第一步进电机1的输出轴与第二步进电机2连接,第二步进电机2的输出轴通过连接块3连接激光扫描探测装置,第一步进电机1固定在电机支撑架4顶面,第一步进电机1和第二步进电机2分别与主控模块7电连接,第一步进电机1的输出轴与第二步进电机2的输出轴垂直。激光扫描探测装置包括旋转电机11、发射棱镜架12、接收棱镜架10、激光发射器14、激光接收器8、发射棱镜13和接收棱镜9,旋转电机11与连接块3连接,旋转电机11的一根输出轴通过发射棱镜架12连接发射棱镜13,另一根输出轴通过接收棱镜架10连接接收棱镜9,旋转电机11实现发射棱镜13和接收棱镜9沿oz轴旋转,第一步进电机1实现发射棱镜13和接收棱镜9沿oy轴旋转,第二步进电机2实现发射棱镜13和接收棱镜9沿ox轴旋转;激光发射器14和激光接收器8分别固定在透明固定架6两端,其中激光发射器14靠近发射棱镜13一侧,正对发射棱镜13,激光接收器8正对接收棱镜9,激光发射器14、激光接收器8分别与主控模块7无线连接。
[0023]
结合图2和图3,一种自适应调整扫描角度的激光扫描探测方法,调整扫描角度步骤如下:
[0024]
步骤1、探测装置开机上电,主控模块7向旋转电机11、激光发射器14和激光接收器8发送启动信号,激光发射器14持续发射脉冲激光,旋转电机11带动发射棱镜13和接收棱镜9旋转周视扫描目标,激光接收器8将获取的回波信号传输给主控模块7;
[0025]
步骤2、主控模块7根据回波信号解算旋转电机11轴线和目标运动方向在垂直投影上的夹角θ,具体如下:
[0026]
步骤2-1、建立三种坐标系:惯性坐标系o0x0y0z0,原点o0为弹药发射点,x0轴在水平面内指向弹药发射方向,y0轴铅直向上,z0轴与x0轴、y0轴构成右手坐标系;弹体坐标系o
m
x
m
y
m
z
m
,原点o
m
位于激光探测系统发射中心,x
m
轴沿弹体纵轴并指向弹头,y
m
轴沿弹体垂直方向指向上方,z
m
轴与x
m
轴、y
m
轴构成右手坐标系;电机坐标系o
d
x
d
y
d
z
d
,原点o
d
与弹体坐标系原点o
m
重合,y
d
轴沿第一步进电机1输出轴,z
d
轴沿旋转电机11轴指向激光发射器14,x
d
轴沿第二步进电机2输出轴,x
d
轴与y
d
轴、z
d
轴构成右手坐标系。
[0027]
已知探测系统俯仰角β
m
、偏航角ψ
m
,弹体坐标系与惯性坐标系之间的转换关系:
[0028][0029]
其中,为从惯性坐标系到弹体坐标系的坐标转换矩阵。
[0030][0031]
从电机坐标系到弹体坐标系的转换关系为:
[0032][0033]
电机坐标系o
d
x
d
y
d
z
d
是将弹体坐标系o
m
x
m
y
m
z
m
绕x
d
轴逆时针旋转β,再绕y
d
轴逆时针
旋转α而成,即:第一步进电机1逆旋转α,第二步进电机2逆时针旋转β,因此电机坐标系o
d
x
d
y
d
z
d
与弹体坐标系o
m
x
m
y
m
z
m
之间的方向余弦矩阵为
[0034][0035]
电机坐标系和惯性坐标系之间的关系为:
[0036][0037]
令
[0038][0039]
步骤2-2、计算旋转电机11轴线垂直投影与x0轴的夹角φ:旋转电机11轴线方向可表示为z
d
=l
31
x0+l
32
y0+l
33
z0,其在垂直方向的投影与x0轴的夹角φ满足φ=arctan(l
33
/l
31
);
[0040]
步骤2-3、假定目标运动为平面运动,根据探测到的多个目标点的信息,解算目标的运动速度v
t
,设目标速度满足v
t
=a1x0+a2y0+a3z0,则其目标运动方向在垂直方向的投影与x0轴的夹角为:ψ=arctan(a3/a1);
[0041]
步骤2-4、获得旋转电机11轴线和目标运动方向在垂直投影上的夹角θ,其中θ=φ-ψ;
[0042]
步骤3、建立最佳角度模型,角度调整装置在于调整第一步进电机1旋转的角度α和第二步进电机2的旋转的角度β,使得θ=0,即满足:
[0043][0044]
已知探测系统的俯仰角β
m
和偏航角ψ
m
,a1和a3可以通过探测多目标点信息求得,代入(7)式可得α和β之间的对应关系,令f(α,β)=0为满足(7)式的函数。为了使旋转电机11上固连的发射棱镜13对准激光发射器14,应尽可能使旋转电机11轴线调整的角度偏小,即应使α和β的值尽可能小。
[0045]
因此,最佳角度模型满足
[0046][0047]
其中m和n分别是第一步进电机1和第二步进电机2的步距角。运用最佳角度模型求解第一步进电机1和第二步进电机2的最小脉冲数k1和k2。
[0048]
步骤4、通过主控模块7分别向第一步进电机1和第二步进电机2发送k1和k2脉冲数,
控制角度调整装置中的第一步进电机1和第二步进电机2旋转相应角度,改变旋转电机11轴线的垂直投影方向,改变激光探测装置扫描目标过程中旋转电机11转动时形成的扫描线方向,从而改变激光扫描目标方向;
[0049]
步骤5、探测装置重新扫描目标,获得角度调整后的目标回波信号,主控模块7生成角度调整后的目标轮廓图像。
[0050]
结合图4,一种自适应调整扫描角度的激光扫描探测方法,主要运用角度调整装置改变旋转电机11轴线的垂直投影方向,改变扫描目标过程中旋转电机11转动时形成的扫描线方向,从而改变激光扫描目标方向。使得角度调整后的扫描图像获取的特定目标轮廓与探测装置上存储的特定目标轮廓的点的个数和位置等数据一致,进而可以提高目标探测的识别率和探测效率。
[0051]
综合所述,本发明所述的自适应调整扫描角度的激光扫描探测装置通过角度调整装置改变旋转电机11轴线方向,调整棱镜角度改变扫描线方。在弹目交会过程中,激光扫描探测装置通过线扫描方法探测目标,根据回波信号,获得多个目标探测点的信息,主控模块7会计算出目标的运动速度,以及旋转电机11轴线与目标前进方向轴线的夹角,从而根据最佳角度模型分别计算出第一步进电机1和第二步进电机2的最小脉冲数,控制第一步进电机1和第二步进电机2旋转相应角度,从而调整旋转电机11轴线的垂直投影方向,使得旋转电机11轴线与目标轴线的垂直投影相互平行,旋转电机11带动棱镜重新扫描后,主控模块7生成角度调整后的目标轮廓信息。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1