基于结构光场的三维矢量速度测量系统及测量方法与流程
[0001]
本发明涉及激光多维测速技术领域,具体涉及一种基于轨道角动量复合调制结构光场的三维矢量速度测量系统及测量方法。
背景技术:
[0002]
三维矢量速度测量对科学和技术领域都具有重要的意义,无论在气象探测和自动驾驶等民用方面,还是预警、导航和火控等军用方面。现有技术中对三维矢量速度的测量只能依靠多设备多点多角度测量合成或图像处理估算,测量方法较为复杂且精度不高,实时性较差,无法很好满足应用需求。
技术实现要素:
[0003]
本发明的目的是为了克服现有技术中对三维矢量速度的测量较为复杂且精度不高,以及实时性较差的问题,提供了一种基于结构光场的三维矢量速度测量系统及测量方法。
[0004]
本发明的基于结构光场的三维矢量速度测量系统,包括激光器、单模光纤、光纤分束器、空间光调制器、4f系统、发射光学系统、接收光学系统、光纤准直器、单向反射玻璃、阵列探测器和三维矢量速度解算模块;
[0005]
激光器发射出射激光信号至单模光纤,单模光纤选取出射激光信号中的单横模高斯模式激光信号入射至光纤分束器,光纤分束器将入射的单横模高斯模式激光信号分为两路,一路单横模高斯模式激光信号入射至空间光调制器;另一路单横模高斯模式激光信号作为本振信号入射至光纤准直器;
[0006]
空间光调制器对入射的单横模高斯模式激光信号进行多阶角动量复合调制生成调制信号,并入射至4f系统;
[0007]
调制信号是-4阶、0阶和4阶的多阶轨道角动量叠加的光束;且调制结构光场呈十字结构,包括位于中心的一个径向多普勒效应光斑和位于径向多普勒效应光斑四周的四个横向多普勒效应光斑;调制结构光场为调制信号的结构光场;
[0008]
4f系统从入射的调制信号中筛选出1级调制信号发射至发射光学系统;
[0009]
发射光学系统将1级调制信号照射待探测的运动目标,待探测的运动目标将1级调制信号反射生成回波信号入射至接收光学系统;且回波结构光场与调制结构光场的结构相同;回波结构光场为回波信号的结构光场;
[0010]
接收光学系统调节回波信号后使其穿过单向反射玻璃的背面加载至阵列探测器;
[0011]
光纤准直器将入射的本振信号调节后发射至单向反射玻璃的反射面;本振信号经单向反射玻璃的反射面反射后加载至阵列探测器,且使得本振信号对准回波结构光场中心的径向多普勒效应光斑;
[0012]
阵列探测器,用于探测回波结构光场的四个横向多普勒效应光斑区域、以及径向多普勒效应光斑与本振信号的叠加区域,得到对应的每个时刻的总光强;并将对应的每个
时刻的总光强发送至三维矢量速度解算模块;
[0013]
三维矢量速度解算模块,与阵列探测器连接,用于根据对应的每个时刻的总光强解算出运动目标的三维矢量速度。
[0014]
本发明的基于结构光场的三维矢量速度测量系统的测量方法,空间光调制器对入射的单横模高斯模式激光信号进行多阶角动量复合调制生成调制信号的具体方法如下:
[0015]
步骤一一、将-4阶、0阶和4阶的相位图叠加成复合的相位图;
[0016]
步骤一二、将复合的相位图加载到空间光调制器上;
[0017]
步骤一三、在单横模高斯模式激光信号入射至空间光调制器时,空间光调制器将入射的单横模高斯模式激光信号调制为-4阶、0阶和4阶的多阶轨道角动量叠加的光束。
[0018]
进一步地,回波结构光场的径向多普勒效应光斑与本振信号的叠加区域包括1号光斑区域,该1号光斑区域对应三维矢量速度的z方向;
[0019]
回波结构光场的四个横向多普勒效应光斑区域包括2号光斑区域、3号光斑区域、4号光斑区域和5号光斑区域;
[0020]
2号光斑区域和4号光斑区域位于经过1号光斑区域的一条横向直线上,且2号光斑区域和4号光斑区域分别对应三维矢量速度的y正方向和y负方向;
[0021]
3号光斑区域和5号光斑区域位于经过1号光斑区域的一条纵向直线上,且3号光斑区域和5号光斑区域分别对应三维矢量速度的x正方向和x负方向。
[0022]
进一步地,三维矢量速度解算模块根据对应的每个时刻的总光强解算出运动目标的三维矢量速度的具体方法如下:
[0023]
步骤二一、对1号光斑区域的每个时刻的总光强的时序信号进行傅里叶变换,提取多普勒频移量δf
z
,并通过如下公式得到三维矢量速度分量v
z
:
[0024]
δf
z
=f0v
z
/c
[0025]
其中,f0为出射激光信号的频率,c为光速;
[0026]
步骤二二、对3号光斑区域和5号光斑区域的每个时刻的总光强的时序信号进行傅里叶变换,提取多普勒频移量δf
x
,并通过如下公式得到三维矢量速度分量v
x
:
[0027]
δf
y
=-sinα
·
f0v
y
/c
[0028]
其中,α≈λl/2πr,λ为激光信号的波长,l为对应光斑区域的轨道角动量阶数,r为对应光斑区域的半径;
[0029]
步骤二三、对2号光斑区域和4号光斑区域的每个时刻的总光强的时序信号进行傅里叶变换,提取多普勒频移量δf
y
,并通过如下公式得到三维矢量速度分量v
y
;
[0030]
δf
x
=-sinα
·
f0v
x
/c
[0031]
步骤二四、将三维矢量速度分量v
x
、v
y
和v
z
根据三维坐标关系解算合成运动目标的三维矢量速度
[0032]
本发明的有益效果是:
[0033]
本发明无需依靠多设备多点多角度测量合成或图像处理估算等后处理算法,本发明在精度高实时性好的激光多普勒测速技术基础上,增加多阶轨道角动量复合调制,以轨道角动量光束的螺旋相位结构为基础通过特殊的叠加设计实现特殊的相位型结构光束,有效增加空间相位信息,从而除了传统线性多普勒效应外还可以获得横向多普勒效应,然后对回波的结构光场进行多个特征点探测解算,充分的利用径向多普勒效应和横向多普勒效
应,实现高精度实时的激光三维矢量速度测量。
附图说明
[0034]
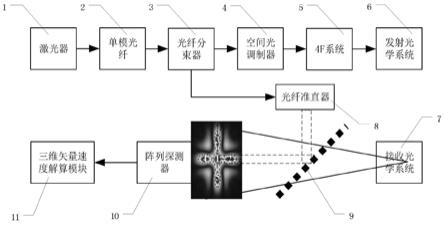
图1为本发明的基于结构光场的三维矢量速度测量系统的结构示意图;
[0035]
图2为本发明的回波结构光场的结构示意图;
[0036]
图3为本发明的回波结构光场多点检测原理示意图。
具体实施方式
[0037]
具体实施方式一,本实施方式的基于结构光场的三维矢量速度测量系统,所采用的技术方案是:以轨道角动量光束的螺旋相位结构为基础通过特殊的叠加设计实现特殊的相位型结构光束,有效增加空间相位信息,从而除了传统线性多普勒效应外还可以获得横向多普勒效应,然后对回波的结构光场进行多个特征点探测解算,同时获得目标的横向速度分量和径向速度分量,重建出目标的三维矢量速度。
[0038]
利用轨道角动量多阶复合调制设计特殊的结构光场,有效增加空间相位信息,使得所设计的结构光场既包括传统径向多普勒效应还包括横向多普勒效应,然后对回波的结构光场进行多个特征点探测解算,同时获得目标的横向速度分量和径向速度分量,最后重建出目标的三维矢量速度。
[0039]
如图1所示,系统包括:激光器1、单模光纤2、光纤分束器3、空间光调制器、4f系统5、发射光学系统6、接收光学系统7、光纤准直器8、单向反射玻璃9、阵列探测器10、三维矢量速度解算模块11(可以配置为计算机)。
[0040]
具体实施方式一,本实施方式的基于结构光场的三维矢量速度测量系统的具体工作方法如下:
[0041]
激光器1产生激光信号经过单模光纤2可以获得很好的单横模高斯模式,以保证后面所设计光场的调制效率。然后经过光纤分束器3将激光信号分成两部分,一部分经过空间光调制器加载所设计的基于轨道角动量复合调制的结构光场,另一部分作为本振信号传输给接收机内的光纤准直器8。然后调制好的信号经过4f系统挑选出信号纯度最高的1级调制信号,然后经过发射光学系统6发射出去,照射待探测的运动目标。
[0042]
上述系统中所使用的空间光调制器使用特殊设计的(-4阶,0阶,4阶)多阶轨道角动量叠加的空间相位调制,获得的特殊结构光场如图2所示,其中心包含一个光斑,对应传统径向多普勒效应;其四周包括四个光斑,对应横向多普勒效应。
[0043]
上述系统中所使用的单模光纤2,光纤分束器3等光纤系统可以从激光器1中获得较好的高斯模式,可有效提高所设计的结构光场的调制效率。
[0044]
上述系统中所使用的4f系统5,可以有效的挑选出1级调制信号,获得更高纯度的结构光场调制信号。其中,1级调制信号为空间光调制器的1级衍射调制信号。
[0045]
运动目标具有三维运动速度(可以由三维速度分量v
x
,v
y
和v
z
完备表示)。经过运动目标的反射,一部分信号返回接收光学系统7,经过接收光学系统7的收集。接收的结构光场经过接收光学系统7的调节照射在阵列探测器10上。其中单向反射玻璃9对回波信号没有任何影响,单向反射玻璃9的作用主要是将经过光纤准直器8调节的本振信号加载到阵列探测器10上。这里需要注意的是本振信号只对准回波结构光场的中心区域,而不是整个回波
光场。这是由于轨道角动量信号的特性,轨道角动量阶数越高信号能量分布的半径也就越大,因此结构光场中心区域主要是0阶轨道角动量成分,其他叠加的高阶轨道角动量成分分布在偏离中心的区域。
[0046]
如图2所示,按照结构光场的能量分布,将其分成5个主要区域,中心的1号光斑区域主要是0阶轨道角动量成分,其他2号光斑区域~5号光斑区域主要是高阶轨道角动量成分,而且通过特殊的结构光场设计,2号光斑区域~5号光斑区域均匀分布,分别对应着y正方向、x正方向、y负方向、x负方向,这样方便三维矢量速度的解算。然后将阵列探测器10探测的信号按照5个区域进行分类处理:
[0047]
对回波结构光场探测采用多特征点探测,其中光纤分束器分出的本振信号经过准直器8调控,只对准回波结构光场的中心,只与中心光斑混合,其他四个光斑都进行独立的探测。
[0048]
中心的1号光斑区域主要是0阶轨道角动量成分,该1号光斑区域的回波与本振信号进行混合,探测后经过傅里叶变换,然后提取出多普勒频移量,该频移量对应的就是传统的线性多普勒频移δf
z
=f0v
z
/c,可以解算出径向速度,即三维速度分量v
z
;
[0049]
2号光斑区域和4号光斑区域也分别探测后分类处理,经过傅里叶变换,然后提取出多普勒频移量δf
y
=-sinα
·
f0v
y
/c,可以解算出三维速度分量v
y
;(其中α≈λl/2πr,是一个与波长λ,轨道角动量阶数l,光斑半径r有关的一个参量);
[0050]
3号光斑区域和5号光斑区域分别探测后分类处理,经过傅里叶变换,然后提取出多普勒频移量δf
x
=-sinα
·
f0v
x
/c,可以解算出三维速度分量v
x
。
[0051]
其中,2号光斑区域和4号光斑区域在x轴上,但测量的是y方向的三维速度分量v
y
,同理3号光斑区域和5号光斑光斑区域在y轴上,但测量的是x方向速度分量v
x
。
[0052]
傅里叶变换是指对时序信号进行的,将一个光斑区域(3或5)同一个光斑区域的信号都叠加到一起,测量的就是该光斑区域对应的每个时刻的总光强,这个光强会随时间强弱变换,然后对这个强弱变化的时序信号进行傅里叶变换后提取多普勒频移量。
[0053]
其多点探测解算过程,如图2所示,根据区域1的线性多普勒效应解算出径向速度分量v
z
;根据区域3和5解算出速度分量v
x
;根据区域2和4解算出速度分量v
y
。最后根据所得的v
x
,v
y
和v
z
重建三维真实矢量速度。
[0054]
最后根据三维坐标关系解算合成出待测的三维矢量速度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1