一种风力发电机联轴器打滑位移在线监测设备的制作方法
[0001]
本发明涉及风力机联轴器打滑监测领域,尤其是涉及一种风力发电机联轴器打滑位移在线监测设备。
背景技术:
[0002]
大型风力发电机机组,发电机和齿轮箱之间通过联轴器连接,为保护发电机和齿轮箱组成的整个机械传动链安全运行,防止出现因过载出现部件损坏,联轴器中安装由扭矩过载保护装置,当载荷过大时,扭矩过载保护装置通过打滑卸载的方式将能量释放。联轴器扭矩过载保护装置出现打滑的次数过多,将导致扭矩过载保护装置损坏。
[0003]
目前,检测风力发电机联轴器打滑的方式是采用主控plc系统比较联轴器两侧的转速差进行比较判断,例如中国专利cn110174264a公开了一种风力发电机组联轴器打滑预警装置、风力发电机及预警方法。该打滑预警装置包括:第一转速齿盘、第二转速齿盘及第一转速测量传感器、第二转速测量传感器、双通道计数器和风机控制器;风机控制器计算得到自启机运行预设时间范围内的第一转速齿盘与第二转速齿盘的累计脉冲数差值,并根据所述累计脉冲数差换算为累计脉冲角度差;最后可通过量化的累计脉冲角度差评估联轴器运行\磨损状态;判断是否打滑等,并在出现异常时为用户提供实时预警及维护提示,同时可根据累计脉冲角度差计算打滑角度变化率,通过计算标准时间段内打滑角度变化率,判断风机是否真实打滑,用以防止信号干扰及脉冲丢失引起的误报。
[0004]
但是,由于硬件限制及软件响应时间等问题,报警转速差设置较高,上述方案误报率与检测精度成正比,检测精度高,误报率高。为避免误报率高,检测精度设置比较低,导致联轴器扭矩过载保护装置多次打滑甚至报废,都未报警,难以满足误报率和漏报率双低的要求。
技术实现要素:
[0005]
本发明的目的就是为了提供一种风力发电机联轴器打滑位移在线监测设备。
[0006]
本发明的目的可以通过以下技术方案来实现:
[0007]
一种风力发电机联轴器打滑位移在线监测设备,所述联轴器中安装有扭矩过载保护机构,所述设备包括:
[0008]
第一金属挡片和用于探测第一金属挡片的第一电感接近传感器,
[0009]
第二金属挡片和用于探测第二金属挡片的第二电感接近传感器,
[0010]
控制器,分别连接第一电感接近传感器和第二电感接近传感器,
[0011]
执行器,连接控制器;
[0012]
所述第一金属挡片和第二金属挡片分别设于联轴器的两端边缘,所述第一电感接近传感器与联轴器轴线所在直线的距离大于联轴器安装第一金属挡片一端的半径,所述第二电感接近传感器与联轴器轴线所在直线的距离大于联轴器安装第二金属挡片一端的半径。
[0013]
所述设备在联轴器未打滑状态下,当第一金属挡片对准第一电感接近传感器时,所述第二金属挡片对准第二电感接近传感器。
[0014]
所述控制器包括:
[0015]
差分放大器,输入端分别连接至第一电感接近传感器和第二电感接近传感器,被配为在第一电感接近传感器和第二电感接近传感器输出不一致时发送打滑信号;
[0016]
plc主控,连接至差分放大器和差分放大器,被配置为在收到打滑信号后控制执行器工作。
[0017]
所述差分放大器和plc主控之间设有脉冲触发锁存器。
[0018]
所述执行器包括蜂鸣器。
[0019]
所述执行器包括报警led灯。
[0020]
所述第一金属挡片的弧度为π/180至5π/180。
[0021]
所述第一金属挡片的弧度为2π/180。
[0022]
所述第二金属挡片的弧度为π/180至5π/180。
[0023]
所述第二金属挡片的弧度为2π/180。
[0024]
与现有技术相比,本发明具有以下有益效果:
[0025]
1)通过设置金属挡片和电感接近传感器的方式,可以在联轴器工作过程中,由电感接近传感器捕捉金属挡片,从而对于打滑进行准确的检测。
[0026]
2)利用差分放大器实现信号的同步比对,可靠性高,精度高。
[0027]
3)金属挡片的弧度为2π/180,可以提高准确度。
附图说明
[0028]
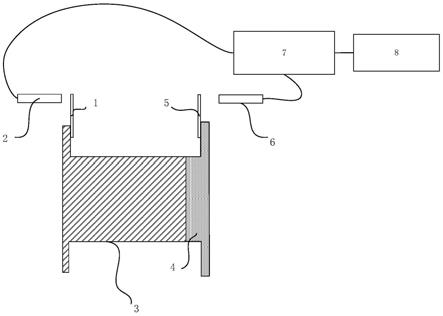
图1为本发明的结构示意图;
[0029]
图2为控制器的示意图;
[0030]
图3为两个电感接近传感器输出信号随打滑位移积累的关系示意图;
[0031]
图4为打滑时差分放大器输出信号示意图;
[0032]
其中:1、第一金属挡片,2、第一电感接近传感器,3、联轴器,4、扭矩过载保护机构,5、第二金属挡片,6、第二电感接近传感器,7、控制器,71、差分放大器,72、脉冲触发锁存器,73、plc主控。
具体实施方式
[0033]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0034]
一种风力发电机联轴器打滑位移在线监测设备,联轴器3中安装有扭矩过载保护机构,如图1所示,设备包括:
[0035]
第一金属挡片1和用于探测第一金属挡片1的第一电感接近传感器2,
[0036]
第二金属挡片5和用于探测第二金属挡片5的第二电感接近传感器6,
[0037]
控制器7,分别连接第一电感接近传感器2和第二电感接近传感器6,
[0038]
执行器8,连接控制器7;
[0039]
第一金属挡片1和第二金属挡片5分别设于联轴器3的两端边缘,第一电感接近传感器2与联轴器3轴线所在直线的距离大于联轴器3安装第一金属挡片1一端的半径,第二电感接近传感器6与联轴器3轴线所在直线的距离大于联轴器3安装第二金属挡片5一端的半径。
[0040]
通过设置金属挡片和电感接近传感器的方式,可以在联轴器3工作过程中,由电感接近传感器捕捉金属挡片,从而对于打滑进行准确的检测。
[0041]
在本实施例中,设备在联轴器未打滑状态下,当第一金属挡片1对准第一电感接近传感器2时,第二金属挡片5对准第二电感接近传感器6。如此,可以简化控制器7的设计,通过纯硬件的方式实现,如图2所示,控制器7包括:
[0042]
差分放大器71,输入端分别连接至第一电感接近传感器2和第二电感接近传感器6,被配为在第一电感接近传感器2和第二电感接近传感器6输出不一致时发送打滑信号;
[0043]
plc主控73,连接至差分放大器711和差分放大器711,被配置为在收到打滑信号后控制执行器工作。
[0044]
具体的,当第一电感接近传感器2和第二电感接近传感器6的输出一致时,差分放大器71输出为低电平,表示没有打滑,当第一电感接近传感器2和第二电感接近传感器6的输出不一致时,差分放大器71输出为高电平,表示发生了打滑,此时plc主控73在收到高电平后,即向执行器8输出高电平,基于此,本实施例大大提高了打滑监测的精度,实现了漏报率和误报率的双低。
[0045]
在其他实施例中,差分放大器71和plc主控73之间可以设有脉冲触发锁存器72。
[0046]
本实施例中,执行器8包括蜂鸣器和报警led灯,第一金属挡片1的弧度为2π/180,第二金属挡片5的弧度为2π/180。
[0047]
在其他实施例中,第一金属挡片1的弧度为π/180至5π/180中的任意值,同理,第二金属挡片5的弧度为π/180至5π/180中的任意值。
[0048]
在另一个实施例中,为了报警降低敏感度,可以选择对plc主控73进行软件开发,不是简单的根据高电平对执行器进行控制。如图3所示,当发生打滑时随着位移的积累,在转速不变的情况下,第一电感接近传感器2和第二电感接近传感器6输出信号会随着位移的积累,重叠部分逐渐缩小,对应到如图4的差分放大器71的输出,高电平的宽度,与高电平之间低电平的宽度的比例会变大,因此,可以通过计算这个比例,当该比例超过设定阈值时,plc主控73再输出高电平至执行器8。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1