一种刚性结构竖向位移变形误差计算方法与流程
1.本发明涉及工程监测技术领域,具体为一种刚性结构竖向位移变形误差计算方法。
背景技术:
2.现行规范规定,高层建筑物、高耸构筑物、重要古建筑物及连续生产的设施基础、动力设备基础等均要进行沉降观测,特别在高层建筑物施工过程中应用沉降观测技术加强过程监控,指导合理的施工工序,预防在施工过程中出现不均匀沉降,及时反馈信息,为勘察、设计、施工提供详尽的第一手资料,避免因沉降原因造成建筑物主体结构的破坏或产生影响使用功能的质量问题,造成巨大的经济损失。
3.在刚性结构长度范围内利用倾角传感器,通过获取各测点倾角变化来计算监测段各处的相对沉降变化量时,通常假设起算点为固定端,直接累积计算所得到的值,实际为各测点真实沉降值、测量误差值和计算误差值的叠加。而在利用倾角传感器进行刚性结构沉降量测量时,通常假设监测段的两端点应为固定端(不动点),各测点沉降值皆为相对两固定端的变化值。
4.因此,单纯利用所测量的倾角通过三角函数进行累积位移计算,所得到的沉降变化量,往往与预期出入较大,已无法满足刚性结构沉降竖向位移变形计算的要求。鉴于上述原因,必须在各测点测量值基础上,设计一种计算方法,除去两端点相对沉降值与各测点测量误差和计算误差的影响。
技术实现要素:
5.本发明的目的在于提供一种刚性结构竖向位移变形误差计算方法,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种刚性结构竖向位移变形误差计算方法,包括以下计算步骤:
7.s1、在刚性结构的长度范围内依次取a、b、c、d四点,分别测量出直线段ab长度l1、直线段bc长度l2、直线段cd长度l3;
8.s2、在a、b、c三点安置倾角传感器,当刚性结构发生沉降后,利用倾角传感器分别测出b点相对直线段ab的旋转角度θ1、c点相对直线段bc的旋转角度θ2、c点相对直线段cd的旋转角度θ3;
9.s3、在a、d两点放置全站仪,利用全站仪获取a点的高程值h1和d点高程值h2;
10.s4、设定沉降后,a、d两点所在直线与水平面的夹角为δθ,并设定为δθ的真实值,为θ1的真实值,为θ2的真实值,为θ2的真实值,各端点产生的累积位移量满足以下关系:
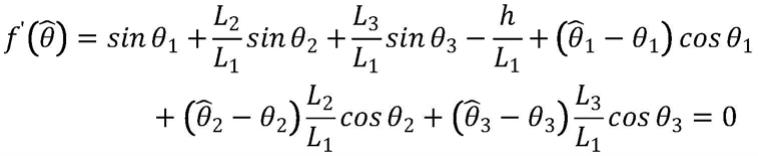
11.12.s5、用泰勒公式在(θ1,θ2,θ3)处将进行展开,得到:
[0013][0014]
令为θ1的修正数,为θ2的修正数,为θ3的修正数,得到:
[0015][0016]
令
[0017][0018]
得到条件方程:
[0019][0020]
s6、根据最小二乘原理,令权阵数得到:
[0021]
f(v)=v
t
pv=v
t
pv
‑
2k(uv+w)
[0022]
根据f(v)存在最小值,求导并令导数值为0,得到:
[0023]
f
′
(v)=2v
t
p
‑
2ku
[0024]
由于p为对角矩阵,得到:
[0025]
v=p
‑1ku
t
;
[0026]
s7、将v=p
‑1ku
t
代入代入代入
[0027]
所以,各监测点的测量值的修正数为:
[0028][0029]
可选的,当l1=l2=l3时,p为单位矩阵。
[0030]
可选的,所述倾角传感器包括固体摆式角传感器、液体摆式角传感器、气体摆式角传感器中的任意一种。
[0031]
与现有技术相比,本发明提供了一种刚性结构竖向位移变形误差计算方法,具备以下有益效果:本发明通过综合坐标轴旋转与平差方法,计算得到各测点角度变化测量值与假设条件下变化值间差量,对测量值进行修正,使其能够符合假设预期,提升监测效果。
附图说明
[0032]
图1为本发明方法的测点平面布置图。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
实施例:请参阅图1,本发明提供了一种刚性结构竖向位移变形误差计算方法,包括以下计算步骤:
[0035]
s1、在刚性结构的长度范围内依次取a、b、c、d四点,分别测量出直线段ab长度l1、直线段bc长度l2、直线段cd长度l3;
[0036]
s2、在a、b、c三点安置固体摆式角传感器,当刚性结构发生沉降后,利用倾角传感器分别测出b点相对直线段ab的旋转角度θ1、c点相对直线段bc的旋转角度θ2、c点相对直线段cd的旋转角度θ3;
[0037]
s3、在a、d两点放置全站仪,利用全站仪获取a点的高程值h1和d点高程值h2,其中h1为a点沉降前后高度变化,h2为d点沉降前后高度变化;
[0038]
s4、设定沉降后,a、d两点所在直线与水平面的夹角为δθ,并设定为δθ的真实值,为θ1的真实值,为θ2的真实值,为θ2的真实值,各端点产生的累积位移量满足以下关系:
[0039][0040]
s5、用泰勒公式在(θ1,θ2,θ3)处将进行展开,得到:
[0041][0042]
令为θ1的修正数,为θ2的修正数,为θ3的修正数,得到:
[0043][0044]
令
[0045][0046]
得到条件方程:
[0047][0048]
s6、根据最小二乘原理,令权阵数得到:
[0049]
f(v)=v
t
pv=v
t
pv
‑
2k(uv+w)
[0050]
根据f(v)存在最小值,求导并令导数值为0,得到:
[0051]
f
′
(v)=2v
t
p
‑
2ku
[0052]
由于p为对角矩阵,得到:
[0053]
v=p
‑1ku
t
;
[0054]
s7、将v=p
‑1ku
t
代入代入代入
[0055]
所以,各监测点的测量值的修正数为:
[0056][0057]
根据上述修正数方程,计算出各点的修正数,从而对各点的测量值进行修正,使测量值能够符合假设预期,提升监测效果。
[0058]
其中,当l1=l2=l3时,p为单位矩阵。修正后的各测点角度值分别为:
[0059][0060]
由上述结论,可以推广到当传感器数为n(n≥2)时,修正数v为:
[0061][0062]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1