一种多圈绝对值磁编码器及其组装方法与流程
1.本发明涉及传感器技术领域,特别是涉及一种多圈绝对值磁编码器及其组装方法,所述多圈绝对值磁编码器采用螺纹消隙齿轮传动,可以实现任意位置编码唯一,且能够实现转角的高精度测量。
背景技术:
2.绝对值编码器内部编码已预先有大数据编码,在整个规定的测量行程中,每一个位置是唯一性的编码,在使用后不会再产生新的编码。目前市面上的多圈绝对值编码器主要有三类:第一类是电子计数式多圈绝对值编码器,在360度范围内是绝对值的,超过360度后回零,并以计数器的增减来增加多圈编码器的编码。也就是多圈数据原始编码没有,而是从寄存器里调取并在使用时通过计数器获得新的编码。如专利公开号为cn204202625u和cn208847208u的专利公开的多圈绝对值编码器,虽然此类多圈绝对值编码器实现了多圈绝对位置计数,但是此类多圈绝对值编码器均需要外部电源供电,系统一旦断电就需要外部电池或电源模块供电,否则容易产生数据丢失的情况;也就是说,电子计数式多圈绝对值编码器在可靠性及容错性上比较差。第二类是机械式多圈绝对值编码器,如专利公开号为cn2028855839u和cn108592955b的专利公开的编码器,这种编码器内部会有一个类似自来水表的齿轮传动结构,即一串与主机械轴逐级啮合的减速齿轮组,每一级齿轮都与上一级齿轮和主机械轴之间有着整数倍的减速比关系。因此,通过识别每个齿轮的旋转角度位置,即可实现对编码器主机械轴旋转圈数的检测,从而实现了任意位置编码绝对唯一。但是这种类型的编码器的制造成本较高,传动精度受齿轮的加工精度制约,且齿轮传动之间存在传动间隙,必然会对编码器精度有影响。第三类是维根效应编码器,如专利公开号为cn103344262b的专利公开的一种编码器,将基于韦根效应制成的韦根线圈置于磁性编码器内并靠近机械轴上的末端磁铁,就可以借助磁场旋转在线圈两端激发出来的电脉冲,触发其内部寄存器的计数累加动作,从而实现对磁性编码器的圈数检测,基于韦根效应的多圈绝对值编码器,其多圈圈数检测的基本原理和前述电池加计数寄存器的方式是一样的,只是因为使用了韦根线圈,让圈数累计不再需要依赖于电池供电和码盘读数。不过这仍然无法改变其位置编码是基于历史数据计算出来的事实。此类编码器存在的缺陷包括:寄存器内圈数和位置记录容易因线路干扰、存储失效、计数错误等电气或软件原因而意外丢失,进而造成编码器多圈绝对值反馈功能失效的问题。
3.总的来讲,现有的编码器存在编码位置容易受电气和软件干扰,编码位置无法实现绝对唯一,而且受系统断电影响,容易产生数据丢失的情况,因此现有的编码器的转角测量的稳定性和可靠性较低。
技术实现要素:
4.本发明的一目的是,提供一种多圈绝对值磁编码器,所述多圈绝对值磁编码器采用齿轮传动,纯机械式位置编码,不受电气及软件问题影响,可以实现任意位置编码绝对唯
一;而且无需设置外部供电电源,不受系统断电影响,长时间断电或不工作数据也不会丢失,具有高稳定性和高可靠性;另外齿轮传动还采用了螺纹消隙机构,能够有效减小传动间隙,以实现磁编码器的高精度测量。
5.一种多圈绝对值磁编码器,适于与电机固定连接,包括pcb基板、设置于所述pcb基板的转角测量模块以及连接于所述转角测量模块的多级齿轮传动系统;所述转角测量模块用于检测所述多级齿轮传动系统的各级齿轮传动系统的转角,并基于所述多级齿轮传动系统的各级齿轮传动系统的转角计算得到所述电机的转角;所述多级齿轮传动系统中的各级齿轮传动系统包括主传动齿轮、从动齿轮以及连接所述主传动齿轮和所述从动齿轮的消隙机构,所述消隙机构包括螺纹柱和薄型弹性体,所述螺纹柱和所述电机的后出轴末端均连接于所述转角测量模块,所述从动齿轮和所述主传动齿轮依次螺纹连接于所述螺纹柱,所述主传动齿轮包括上齿轮和下齿轮,所述薄型弹性体被套设于所述螺纹柱并被设置于所述上齿轮和所述下齿轮之间,所述上齿轮和所述下齿轮螺纹连接所述螺纹柱并形成错齿布置的状态,以在所述主传动齿轮和所述从动齿轮之间啮合时减小齿轮传动间隙,从而实现转角的高精度测量。
6.在本发明的一实施例中,所述消隙机构进一步包括锁紧螺母,所述锁紧螺母被设置于所述主传动齿轮之上并螺纹连接于所述螺纹柱,用于压紧锁定所述主传动齿轮的所述上齿轮和所述下齿轮。
7.在本发明的一实施例中,所述转角测量模块包括传感器组和与所述传感器组位置相对应的磁组,所述传感器组包括多个霍尔传感器,所述霍尔传感器设置于所述pcb基板,所述磁组包括多个磁极,所述磁极与所述霍尔传感器的位置一一对应且所述磁极设置于所述螺纹柱的末端。
8.在本发明的一实施例中,所述传感器组包括四个所述霍尔传感器,所述磁组包括四个所述磁极,所述霍尔传感器分别与对应的所述磁极相对设置,各所述霍尔传感器检测对应的所述磁极的绝对位置,所述转角测量模块基于四组数据计算而输出转角的绝对位置编码信息。
9.在本发明的一实施例中,所述磁组进一步包括多个磁极座,所述磁极设置于对应的所述磁极座内。
10.在本发明的一实施例中,所述多级齿轮传动系统为三级齿轮传动系统,每级传动比均为16。
11.在本发明的一实施例中,所述从动齿轮均为圆柱直齿轮。
12.在本发明的一实施例中,所述薄型弹性体为波浪式结构且采用柔性abs塑料材料制成。
13.在本发明的一实施例中,所述多圈绝对值磁编码器进一步包括编码器壳体,所述编码器壳体包括上壳体和与所述上壳体相适配的下壳体,所述pcb基板被固定设置于所述上壳体,所述转角测量模块和所述多级齿轮传动系统设置于所述上壳体和所述下壳体界定形成的容纳槽内。
14.本发明在另一方面还提供了一种多圈绝对值磁编码器的组装方法,包括以下步骤:
15.(a)组装多级齿轮传动系统,包括步骤:将从动齿轮装入螺纹柱上,通过螺纹锁紧
的方式固定连接于所述螺纹柱;依次将下齿轮、薄型弹性体、上齿轮装入所述螺纹柱;将锁紧螺母装入所述螺纹柱,压紧所述上齿轮和所述下齿轮直至所述薄型弹性体变形,并使得所述上齿轮和所述下齿轮之间相对固定且呈错齿布置的状态;
16.(b)将转角测量模块安装于pcb基板,包括步骤:将所述转角测量模块的霍尔传感器和磁极以位置一一对应的方式安装于pcb基板;以及
17.(c)将组装好的所述多级齿轮系统装入编码器壳体的下壳体,形成下壳体模块,将组装好的所述转角测量模块和所述pcb基板固定安装于所述编码器壳体的上壳体,形成上壳体模块,最后将组装好的所述上壳体模块和所述下壳体模块灌胶固接,形成所述多圈绝对值磁编码器。
18.本发明具有以下优势:
19.(1)本发明的所述多圈绝对值磁编码器采用机械式高精度齿轮消隙传动,无需高精度安装,任意绝对位置编码唯一,位置不受电气和软件影响,且无需额外供电系统,不受系统断电影响,能够实现对转角的高精度测量,具有高可靠性和高稳定性的优点。
20.(2)本发明的所述多圈绝对值磁编码器采用螺纹消隙机构来消除齿轮传动间隙,无需过多元器件,整体结构安装方便简单,能够有效减小传动间隙,以有利于提高转角测量精度;而且齿轮互换性强,方便维护,成本低。
21.(3)本发明的所述多圈绝对值磁编码器利用磁原理,核心部件为磁极和霍尔传感器,具备高速旋转和较强的抗振动能力,能够适用于恶劣环境中使用,适用性广泛。
22.通过对随后的描述和附图的理解,本发明进一步的目的和优势将得以充分体现。
附图说明
23.图1为根据本发明的上述优选实施例的所述多圈绝对值编码器的外形示意图。
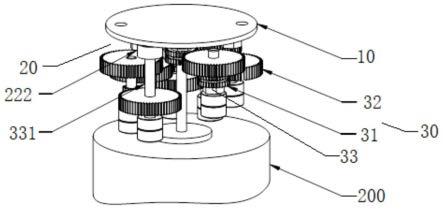
24.图2为根据本发明的一优选实施例的所述多圈绝对值磁编码器的内部结构示意图。
25.图3为根据本发明的上述优选实施例的所述多圈绝对值编码器的部分结构示意图。
26.图4为根据本发明的上述优选实施例的所述多圈绝对值编码器的部分结构的剖视示意图。
27.图5为根据本发明的上述优选实施例的所述多圈绝对值编码器的薄型弹性体的结构示意图,其示意了所述薄型弹性体在安装的时候的受力方向。
28.图6为根据本发明的上述优选实施例的所述多圈绝对值编码器的pcb基板的结构示意图。
29.图7为根据本发明的上述优选实施例的所述多圈绝对值编码器的上壳体的结构示意图。
30.图8为根据本发明的上述优选实施例的所述多圈绝对值编码器的上壳体的剖视示意图。
31.图9为根据本发明的上述优选实施例的所述多圈绝对值编码器的下壳体的结构示意图。
32.图10为根据本发明的上述优选实施例的所述多圈绝对值编码器的下壳体的剖视
示意图。
33.附图标号说明:多圈绝对值编码器100;pcb基板10;定位孔101;转角测量模块20;传感器组21;霍尔传感器211;磁组22;磁极221;磁极座222;多级齿轮传动系统30;主传动齿轮31;上齿轮311;下齿轮312;从动齿轮32;消隙机构33;螺纹柱331;薄型弹性体332;锁紧螺母333;轴承35;编码器壳体40;上壳体41;定位柱411;开口4111;锥帽4112;走线孔412;下壳体42;轴承安装孔421、装配孔422、下壳止口423;电机200。
具体实施方式
34.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、形变方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
35.本领域技术人员应理解的是,在本发明的揭露中,术语“竖向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
36.可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
37.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
38.如图1至图10所示,根据本发明的一优选实施例的多圈绝对值编码器100的具体结构被阐明。如图1至图4所示,所述多圈绝对值编码器100适于与电机200固定连接,并包括pcb基板10、设置于所述pcb基板10的转角测量模块20以及连接于所述转角测量模块20的多级齿轮传动系统30;所述转角测量模块20用于测量转角的绝对位置,即所述转角测量模块20用于测量所述多级齿轮传动系统30的各级齿轮传动系统的转角,并基于所述多级齿轮传动系统30的各级齿轮传动系统的转角计算得到所述电机200的转角;所述多级齿轮传动系统30中的各级齿轮传动系统包括主传动齿轮31、从动齿轮32以及连接于所述主传动齿轮31和所述从动齿轮32的消隙机构33,所述消隙机构33包括螺纹柱331和薄型弹性体332,所述螺纹柱331的末端连接于所述转角测量模块20,所述从动齿轮32和所述主传动齿轮31依次螺纹连接于所述螺纹柱331,所述主传动齿轮31包括上齿轮311和下齿轮312,所述薄型弹性体332被套设于所述螺纹柱331并被设置于所述上齿轮311和所述下齿轮312之间,所述上齿轮311和所述下齿轮312螺纹连接所述螺纹柱331并形成错齿布置的状态,以在所述主传动齿轮31和所述从动齿轮32之间啮合时减小齿轮传动间隙,从而实现所述电机200的转角的高精度测量。
39.应该理解的是,所述转角测量模块20检测的转角为转轴转动的角度。
40.值得一提的是,如图1所示,所述多圈绝对值磁编码器进一步包括编码器壳体40,所述编码器壳体40包括上壳体41和与所述上壳体41相适配的下壳体42,所述pcb基板10被固定设置于所述上壳体41,所述转角测量模块20和所述多级齿轮传动系统30设置于所述上壳体41和所述下壳体42界定形成的容纳槽内。
41.值得一提的是,如图1和图2所示,所述多圈绝对值编码器100设置于所述电机200的后端,具体地,所述编码器壳体40与所述电机200的机壳固定连接。
42.可以理解的是,所述多圈绝对值编码器100采用机械式的齿轮传动,为纯机械式位置编码,因此不受电气和软件问题的影响,能够实现任意位置编码绝对唯一;而且无需设置外部供电电源,不受系统断电影响,在长时间断电或者不工作的情况下编码数据也不会丢失,具有高稳定性和高可靠性。
43.还可以理解的是,所述多级齿轮传动系统30的各级齿轮传动系统均设置有所述消隙机构33,具体地,通过将所述主传动齿轮31的所述上齿轮311和所述下齿轮312螺纹连接于所述螺纹柱331的方式,实现所述上齿轮311和所述下齿轮312之间的错齿布置,以此能够在齿轮传动时,对齿轮传动间隙进行有效补偿,从而有利于实现转角的高精度测量。换句话说,所述消隙机构33为螺纹消隙机构33,能够在齿轮啮合时有效减小齿轮传动间隙,从而实现转角的高精度测量。
44.进一步地,所述多级齿轮传动系统30还包括锁紧螺母333,所述锁紧螺母333被设置于所述主传动齿轮31之上并螺纹连接于所述螺纹柱331,用于压紧锁定所述主传动齿轮31的所述上齿轮311和所述下齿轮312。
45.具体地,在所述多级齿轮传动系统30装配时,所述从动齿轮32和所述主传动齿轮31依次装入所述螺纹柱331,其中所述主传动齿轮31的所述上齿轮311和所述下齿轮312之间设置所述薄型弹性体332,并使得所述上齿轮311和所述下齿轮312之间的轮齿错开微小角度,用于补偿传动间隙,最后将所述锁紧螺母333拧紧以将所述上齿轮311和所述下齿轮312压紧锁定,所述锁紧螺母333压紧所述上齿轮311和所述下齿轮312时会使得所述薄型弹性体332变形产生回弹力,该回弹力可以提高所述锁紧螺母333、所述上齿轮311以及所述下齿轮312之间的摩擦力,起到有效的防松效果。最终所述上齿轮311和所述下齿轮312呈错齿分布的状态,且所述上齿轮311和所述下齿轮312之间的所述薄型弹性体332呈变形的状态。可以理解的是,所述主传动齿轮31的所述上齿轮311和所述下齿轮312之间错齿的间隙可以根据实际装配情况进行调整以满足传动精度的要求,传动间隙调试完成后再将所述锁紧螺母333锁紧即可。
46.特别地,如图5所示,所述薄型弹性体332为波浪式结构且采用柔性abs塑料材料制成。在所述薄型弹性体332受力时,所述薄型弹性体332两侧的受力点均布且不在同一位置,且所述薄型弹性体332的两侧的受力点对称性均布交错,可以提供更大的变形力,也就是说,所述薄型弹性体332的波浪式结构与普通的弹簧垫圈相比,具有更高的刚性、变形一致性以及受力均匀性。
47.如此,本发明的所述多圈绝对值磁编码器采用波浪式结构的所述薄型弹性体332,有利于确保整体结构的稳定性,从而有利于确保所述多圈绝对值磁编码器的抗振动能力和转角测量的高精度。
48.值得一提的是,abs塑料(acrylonitrile butadiene styrene plastic)是丙烯腈(a)、丁二烯(b)、苯乙烯(s)三种单体的三元共聚物,因此abs塑料兼有三种组元的共同性能,丙烯腈(a)使其耐化学腐蚀、耐热,并有一定的表面硬度,丁二烯(b)使其具有高弹性和韧性,苯乙烯(s)使其具有热塑性塑料的加工成型特性并改善电性能。
49.可以理解的是,所述多级齿轮传动系统30的各级齿轮传动系统的齿轮组为双联齿轮,即所述螺纹柱331上同时连接有所述主传动齿轮31和所述从动齿轮32。具体地,所述多级齿轮传动系统30的具体组装方式为:将所述主传动齿轮31的所述下齿轮312胶粘在所述螺纹柱331上;套入所述薄型弹性体332,再套入所述上齿轮311,沿所述螺纹柱331的螺纹方向旋入所述锁紧螺母333,锁紧前调整所述上齿轮311和所述下齿轮312之间的错齿量,并且同时保证所述上齿轮311和所述下齿轮312可以与所述从动齿轮32正常啮合;然后在将所述锁紧螺母333旋紧压缩所述薄型弹性体332,以产生防松摩擦力。最后再胶粘所述从动齿轮32和相关轴承35,此时所述主传动齿轮31、所述螺纹消隙机构33、所述从动齿轮32以及相关轴承35组成一个双联齿轮转轴,可以整体作为模块化安装在所述多圈绝对值磁编码器的编码器壳体40中。
50.值得一提的是,所述从动齿轮32为圆柱直齿轮,与所述主传动齿轮31啮合,通过所述主传动齿轮31的所述上齿轮311和所述下齿轮312的错齿布置,实现所述从动齿轮32和所述主传动齿轮31之间无间隙传动,以确保所述多圈绝对值磁编码器的转角测量精度。
51.特别地,在本发明的这一优选实施例中,所述多级齿轮传动系统30为三级齿轮传动系统,每级传动比均为16,每一级又有二级减速齿轮,最终实现2
12
圈计数(即4096圈),但不局限于此,根据不同尺寸及不同使用需求可设计多级减速并实现不同圈数计数,也就是说,在本发明的一些实施例中,根据实际需求,所述多圈绝对值磁编码器也可以采用三级以上的多级齿轮传动系统30,本发明对此不作限制。
52.值得一提的是,在本发明的这一优选实施例中,所述多级齿轮传动系统30主要采用3种齿轮,齿数分别为15、30、60,齿轮模数相同,相同齿数及相同结构的齿轮可实现任意互换,有利于降低生产成本及装配难度。
53.此外,还值得一提的是,所述多级齿轮传动系统30的所述消隙机构33不局限应用于传感器领域,同样适用于小负载、小空间的各种应用场景,本发明对此不作限制。
54.进一步地,所述转角测量模块20包括传感器组21和与所述传感器组21位置相对应的磁组22,所述传感器组21包括多个霍尔传感器211,所述霍尔传感器211设置于所述pcb基板10,所述磁组22包括多个磁极221,所述磁极221与所述霍尔传感器211的位置一一对应且所述磁极221设置于所述螺纹柱331的末端。
55.值得一提的是,所述磁组22进一步包括多个磁极座222,所述磁极221设置于对应的所述磁极座222内。在本发明的这一优选实施例中,所述磁极221可以通过胶粘的方式固定在所述磁极座222内。
56.此外,还值得一提的是,所述磁极座222连接于对应的所述螺纹柱331的一端,所述轴承35安装在所述螺纹柱331的另一端。
57.具体地,在本发明的这一优选实施例中,所述传感器组21包括四个所述霍尔传感器211,所述磁组22包括四个所述磁极221,所述霍尔传感器211分别与对应的所述磁极221相对设置,如图6所示,各所述霍尔传感器211检测对应的所述磁极221的绝对位置,所述转
角测量模块20基于四组数据计算而输出转角的绝对位置编码信息。
58.更具体地,四个所述霍尔传感器211被布置于所述pcb基板10,所述电机200的后出轴以及所述三级齿轮传动系统的所述螺纹柱331末端安装有径向磁化的小磁铁,即安装有所述磁极221,所述磁极221的位置与所述霍尔传感器211一一对应,通过所述霍尔传感器211测出所述磁极221的转角,从而基于所得到的所述磁极221的转角计算而得到所述电机200的转过角度。
59.进一步地,如图7至图10所示,所述多圈绝对值编码器100的所述编码器壳体40的具体结构被阐明。如图7和图8所所示,所述编码器壳体40的所述上壳体41设置有两个定位柱411和走线孔412,所述走线孔412用于走线,所述pcb基板10设置有相应的两个定位孔101,所述pcb基板10和所述上壳体41经由所述定位柱411和所述定位孔101之间相卡扣而形成固定连接,也就是说,所述pcb基板10通过卡扣固定的方式被安装于所述上壳体41。具体地,所述定位柱411上设计有开口4111,末端为锥帽结构,所述上壳体41以所述定位柱411对准所述pcb基板10的所述定位孔101的方式克服锥帽4112的阻力压入,当完全压入所述pcb基板10后,锥帽4112可以防止所述pcb基板10松动掉出。所述上壳体41的所述定位柱411一方面用于所述pcb基板10的固定,另一方面用于所述pcb基板10的定位,防止所述霍尔传感器211与所述磁极221位置有偏离,使计算更准确。
60.如图9和图10所示,所述编码器壳体40的所述下壳体42设置有轴承安装孔421、装配孔422以及下壳止口423,所述下壳体42镜所述装配孔422被安装在所述电机200的后端,所述轴承安装孔421用于安装轴承35,所述走线孔412用于走线。在将所述多圈绝对值编码器100安装于所述电机200时,首先将所述下壳体42安装于所述电机200后端,其次将所述多级齿轮传动组件装入所述下壳体42,最后将所述pcb基板10和所述上壳体41组成的上壳体41模块与所述多级齿轮传动组件和所述下壳体42构成下壳体42模块相连接,如灌胶固接,形成可与所述电机200匹配使用的编码器整体。
61.可以理解的是,在本发明在另一方面还提供了一种多圈绝对值磁编码器的组装方法,包括以下步骤:
62.(a)组装多级齿轮传动系统30,具体包括步骤:将从动齿轮32装入螺纹柱331上,通过螺纹锁紧的方式固定连接于所述螺纹柱331;依次将下齿轮312、薄型弹性体332、上齿轮311装入所述螺纹柱331;将锁紧螺母333装入所述螺纹柱331,压紧所述上齿轮311和所述下齿轮312直至所述薄型弹性体332变形,并使得所述上齿轮311和所述下齿轮312之间相对固定且呈错齿布置的状态;
63.(b)将转角测量模块20安装于pcb基板10,具体包括步骤:将所述转角测量模块20的霍尔传感器211和磁极221以位置一一对应的方式安装于pcb基板10;以及
64.(c)将组装好的所述多级齿轮系统装入编码器壳体40的下壳体42,形成下壳体42模块,将组装好的所述转角测量模块20和所述pcb基板10固定安装于所述编码器壳体40的上壳体41,形成上壳体41模块,最后将组装好的所述上壳体41模块和所述下壳体42模块灌胶固接,形成所述多圈绝对值磁编码器。
65.可以理解的是,本发明提出的带有齿轮消隙机构33的所述多圈绝对值磁编码器应用于可应用于机床、机器人、电梯等多种应用领域,作为一种角度测量传感器,集成齿轮组消隙传动系统,实现了低成本高精度测量。而且本发明的所述多圈绝对值磁编码器的所述
多级齿轮传动系统30中的齿轮可以通过模具化注塑成型,一致性好,互换性高,大大降低了设计成本与维护成本。所述主传动齿轮31为分片式设计,通过上、下两片齿轮错齿布置,配合所述薄型弹性体332和所述锁紧螺母333,实现传动间隙可调机构。另外,所述薄型弹性体332被设置为波浪式结构,能够实现高刚度大变形,受力均匀,该组齿轮螺纹消隙机构33占用空间小,适用于小负载及小空间的应用场合,并不局限应用于传感器领域。
66.总的来讲,本发明的所述多圈绝对值磁编码器采用齿轮传动,纯机械式位置编码,不受电气及软件问题影响,可以实现任意位置编码绝对唯一;而且无需设置外部供电电源,不受系统断电影响,长时间断电或不工作数据也不会丢失,具有高稳定性和高可靠性;另外齿轮传动还采用了螺纹消隙机构33,能够有效减小传动间隙,以实现磁编码器的高精度测量。
67.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
68.以上实施例仅表达了本发明的优选的实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1