相机焦面光学无缝拼接的像元重叠精度测试装置
1.本发明涉及空间光学遥感技术领域,具体涉及相机焦面光学无缝拼接的像元重叠精度测试装置。
背景技术:
2.光学遥感广泛应用于军事、农业、自然灾害监测与评估等领域,是国防与民生不可或缺的重要手段之一。随着遥感技术的发展,人们开始希望单张遥感图像能覆盖更大的区域,大宽幅成像相机已成为发展趋势。为了增大相机幅宽,需要增大遥感相机视场,很多情况下,遥感相机的视场由图像传感器的尺寸决定。受到工艺水平限制,图像传感器尺寸不能无限增大,大面积tdi cmos制造不仅十分复杂而且价格昂贵,可以采用tdi cmos光学拼接的方式解决这个问题。光学拼接是采用光学拼接元件通过透射折射等光学原理,将像平面分开到几个空间平面,各个空间平面的图像传感器成像之间首尾像元重叠,解决大面积tdi cmos制造困难的问题。
3.光学拼接由于光学拼接元件制作、图像传感器安装等误差,往往会出现重叠像元数实际值和理论值不相符合的情况,光学拼接的精度下降可能导致成像幅宽的下降,甚至使成像出现“漏缝”,为后期在轨成像处理精确确定片间像元关系提出了很大的挑战。因此,探究相机焦面tdi cmos光学无缝拼接的片间像元重叠的精度具有很重要的意义。在光学无缝拼接方面,很多科研院所都做出了卓有成效的研究,但是目前的研究成果主要集中在片间像元重叠精度的理论计算,没有相应的实验装置对光学拼接tdi cmos片间像元重叠精度进行测量;其次,针对焦面采用光学拼接的航天相机,对其在轨图像做拼接处理并计算像元重叠精度,若出现拼接误差时无法再对图像传感器做重新装调;再者,对此类光学拼接tdi cmos使用一般目标图像成像的图像做拼接时,通过光学拼接元件反射成像的部分图像需要先通过抽头算法重组图像,再计算拼接精度,耗时长,算法复杂,如图1所示,n和m分别表示行和列。由此,亟需对光学拼接tdi cmos图像传感器片间像元重叠精度快速测量的地面实验。
技术实现要素:
4.为了解决需求对光学拼接tdi cmos图像传感器片间像元重叠精度进行测量的地面实验装置、且测试装置计算拼接精度时耗时短算法简单的问题,本发明提供相机焦面光学无缝拼接的像元重叠精度测试装置。
5.本发明为解决技术问题所采用的技术方案如下:
6.相机焦面光学无缝拼接的像元重叠精度测试装置,包括光学拼接成像模拟系统、靶标系统和成像分析系统;靶标系统能够显示并移动靶标图像;光学拼接成像模拟系统包括多个相机,相机能够对靶标图像成像,相邻相机所成的像存在像元重叠区域;成像分析系统连接相机,能够将相机所成的像拼接成一幅图像并能够根据靶标图像分析拼接精度偏差;所述靶标图像移动的运动速率与相机的行频相匹配,靶标图像为条纹图像,条纹图像包
括多个从左至右顺次排列的条纹子图像,每个条纹子图像包括第一颜色条纹和第二颜色条纹,条纹子图像中的所有第一颜色条纹位于该条纹子图像中所有第二颜色条纹的左侧或右侧,相邻条纹子图像之间相邻条纹的颜色不同,条纹子图像之间第一颜色条纹数量不相同、第二颜色条纹数量也不相同,第一颜色条纹和第二颜色条纹的条纹宽度均等于光学拼接成像模拟系统的成像地面分辨率。
7.本发明的有益效果是:
8.本发明相机焦面光学无缝拼接的像元重叠精度测试装置提供了一种地面探究相机焦面tdi cmos光学无缝拼接的片间像元重叠的精度的装置,本发明通过特殊的靶标图像,靶标图像以一定速率移动,由光学拼接成像模拟系统对靶标图像进行成像,并将图像数据通过数据线传输至成像分析系统,成像分析系统根据靶标图像的条纹信息分析实际成像能够快速确定光学拼接成像模拟系统成像图片在靶标图像上的位置并快速得出实际采集图像的像元重叠数与理论值的精度偏差,实现光学拼接成像模拟系统无缝拼接的片间像元重叠精度的快速测量。本发明相机焦面光学无缝拼接的像元重叠精度测试装置得到片间像元重叠精度的算法简单,计算用时短。
附图说明
9.图1为现有技术中图像成像拼接流程图。
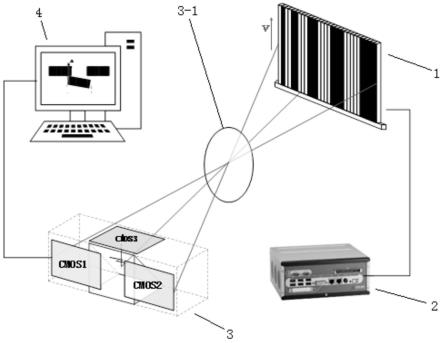
10.图2为本发明相机焦面光学无缝拼接的像元重叠精度测试装置的结构图。
11.图3为本发明相机焦面光学无缝拼接的像元重叠精度测试装置tdi cmos示意图。
12.图4为本发明相机焦面光学无缝拼接的像元重叠精度测试装置的靶标图像示意图
13.图5为本发明相机焦面光学无缝拼接的像元重叠精度测试装置的偏差像元计算示意图。
14.图中:1、led显示屏,2、led控制装置,3、光学拼接成像模拟系统,3-1、成像镜头,3-2、45
°
角的棱镜,4、计算机,5、靶标图像,5-1、条纹子图像,5-2、第一颜色条纹,5-3、第二颜色条纹。
具体实施方式
15.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。
16.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
17.相机焦面光学无缝拼接的像元重叠精度测试装置,包括光学拼接成像模拟系统3、靶标系统和成像分析系统。结构如图2所示。
18.光学拼接成像模拟系统3用于对进行靶标系统成像,成像能够得到多幅能够拼接成一幅完整图像的子图像。光学拼接成像模拟系统3包括相机。相机采用tdi cmos,tdi cmos为若干块。相机能够对靶标图像5成像,相邻相机所成的像存在像元重叠区域,所有相机对靶标图像5所成的像能够拼接成一幅图像。
19.成像分析系统连接光学拼接成像模拟系统3,光学拼接成像模拟系统3的子图像传
输至成像分析系统,成像分析系统用于接收并拼接光学拼接成像模拟系统3所成的子图像,并能够根据靶标图像5分析拼接的精度偏差。成像分析系统采用计算机4。
20.靶标系统能够显示靶标图像5,该靶标图像5能够运动(即移动),运动速率与光学拼接成像模拟系统3相机的行频相匹配,运动方向平行于光学拼接成像模拟系统3相机的像元列方向,即平行于一列像元,运动方向为向上或向下,运动方向平行于相机推扫方向。靶标系统包括led显示屏1和led控制装置2,led屏通过电缆与led控制装置2相连接,led显示屏1显示靶标图像5,led控制装置2控制靶标图像5的运动。
21.靶标图像5为条纹图像,靶标图像5包括多个从左至右顺次排列的条纹子图像5-1,每个条纹子图像5-1包括第一颜色条纹5-2和第二颜色条纹5-3,第一颜色条纹5-2至少为一条,第二颜色条纹5-3至少为一条,一个条纹子图像5-1中的所有第一颜色条纹5-2构成第一颜色条纹组,一个条纹子图像5-1中的所有第二颜色条纹5-3构成第二颜色条纹组,第一颜色条纹5-2的条纹宽度和第二颜色条纹5-3的条纹宽度相等,条纹宽度都等于光学拼接成像模拟系统3的成像地面分辨率。条纹子图像5-1中的所有第一颜色条纹5-2位于该条纹子图像5-1中所有第二颜色条纹5-3的左侧或右侧。相邻条纹子图像5-1之间,左侧条纹子图像5-1的最右侧的条纹的颜色不同于右侧条纹子图像5-1的最左侧的条纹的颜色,若条纹子图像5-1只有两种颜色,则每个条纹子图像5-1中均为所有第一颜色条纹5-2位于所有第二颜色条纹5-3的左侧。条纹的宽度方向为左右方向,长度方向为上下方向。条纹顺次连接,相邻的条纹之间连接,即:相邻两个条纹之间,位于左侧的条纹的右侧边连接位于右侧的条纹的左侧边。所有条纹子图像5-1之间第一颜色条纹5-2数量不相同,所有条纹子图像5-1之间条纹子图像5-1的第二颜色条纹5-3数量不相同,每个条纹子图像5-1中第一颜色条纹5-2的条纹数量等于该条纹子图像5-1中第二颜色条纹5-3的条纹数量。本实施方式中采用靶标图像5为黑白条纹以等差数列间隙交替排列的二维平面图,第一颜色条纹5-2为黑色可称为黑条纹,第二颜色条纹5-3为白色可称为白条纹,顺次设置的条纹子图像5-1的第一颜色条纹5-2数量构成等差数列,顺次设置的条纹子图像5-1的第二颜色条纹5-3数量构成等差数列,条纹子图像5-1内的第一颜色条纹5-2和第二颜色条纹5-3数量相等,如图4,为公差等于1的等差数列,图4中从左至右为:一条黑条纹一条白条纹(第一个条纹子图像5-1)、两条黑条纹两条白条纹(第二个条纹子图像5-1)、三条黑条纹三条白条纹(第三个条纹子图像5-1)、四条黑条纹四条白条纹(第四个条纹子图像5-1)、五条黑条纹五条白条纹(第五个条纹子图像5-1)
……
黑条纹组和白条纹组交替设置。
22.光学拼接成像模拟系统3还包括成像镜头3-1,相机和成像镜头3-1均固定安装在水平防震台上,相机放置在成像镜头3-1焦距处,相机接收成像镜头3-1对靶标图像5所成的像。光学拼接成像模拟系统3还包括拼接元件,通过拼接元件实现没有直接面向成像镜头3-1的相机能够接收到成像镜头3-1对靶标图像5所成的像。一部分相机正对应成像镜头3-1另一部分正对应拼接元件。正对应成像镜头3-1的相机位于成像镜头3-1垂直于光轴且经过焦点的平面,正对应拼接元件的相机位于成像镜头3-1经拼接元件透射和/或反射后的焦距处。
23.成像镜头3-1焦距为f0,成像镜头3-1与led显示屏1上靶标图像5距离为h,即物距为h,相机的像元尺寸为a,光学拼接成像模拟系统3的成像地面分辨率为光学
拼接成像模拟系统3的行频为ν,靶标图像5成像在tdi cmos上的移动速率为v0=a
×
ν,靶标图像5相对于光学拼接成像模拟系统3的运动速率为
24.led显示屏1显示此特殊制作的靶标图像5,供光学拼接成像模拟系统3成像,并使该靶标图像5以与tdi cmos行频相匹配的速率在led显示屏1上运动,led控制装置2调节led屏上靶标图像5的运动速率。
25.光学拼接成像模拟系统3完成拍照后传输图像至计算机4,由于本装置采用的特殊靶标,直接根据成像图像的条纹数量确定每一片tdi cmos成像图像的开始位置和结束位置,与理论成像图像的开始位置和结束位置对比,计算实际采集图像的像元重叠数与理论值的精度偏差,判断光学拼接的精度。
26.本实施方式中采用三块像元尺寸a为7μmtdi cmos进行光学拼接,每块tdi cmos像元数为2000,分别称为tdi cmos1(或cmos1)、tdi cmos2(或cmos2)、tdi cmos3(或cmos3)。
27.如图3所示,采用45
°
角的棱镜3-2为拼接元件,此时由于棱镜对光线的偏折,将像平面分隔为空间内的两个平面,其中一个平面接收直接入射的光线,组装顺序为tdi cmos—棱镜—tdi cmos,另一平面安装的tdi cmos正好接收棱镜偏折后的光线,组装后每相邻两片tdi cmos首尾有一定的像元重叠区域,重叠部分像元数为50,光学拼接成像系统的相机成为无空缺感光区的宽视场探测器。在本实施例中,由于45
°
角的棱镜3-2对于光线偏折90
°
的特殊性,这两个像平面是互相垂直的。
28.本实施例中成像镜头3-1焦距f0=4mm,物距h=5m,tdi cmos像元尺寸a=7μm,此时成像的分辨率为x0=8.75mm,即我们采用的靶标图像5的分辨率应为8.75mm,在实际中是采用led屏作为成像靶标,靶标图像5如图4所示,满足一条黑条纹一条白条纹、两条黑条纹两条白条纹、三条黑条纹三条白条纹
……
交替排列,每条条纹间距为成像分辨率x0=8.75mm,每一列像元对一条条纹成像。
29.本实施例中采用tdi cmos行频为0.2khz,为模拟卫星相机对于地面固定靶标推扫成像,固定相机系统,让led屏上靶标图像5相对于相机以一定速率v移动,实现靶标相对于相机运动速率v与tdi cmos行频相匹配,此时有靶标图像5在tdi cmos上所成的像的移动速率为v0=0.0014m/s。
30.通过几何关系可以知道此时led屏上靶标图像5相对于相机的运动速率为
31.v=(v0×
h)/f0=(0.0014m/s
×
5m))/4mm=1.75m/s
32.使用计算机4对采集到的图像进行处理,仅需根据黑白条纹排布的规则顺序,确定实际与理想情况下cmos3的成像图像上第一个条纹在靶标上的位置和最后一个条纹在靶标上的位置,通过比较即可获得实际采集图像的像元重叠数与理论值的偏差。如图5所示定义推扫方向和垂轨方向,由于相机采用tdi成像模式,最终图像推扫方向精度偏差被补偿,因此只考虑垂轨方向精度偏差。图5(2)中实际cmos3的tdi成像图像上第一个条纹的位置为a’,图5(1)中理想情况下cmos3的tdi成像图像上第一个条纹的位置为a,a和a’之间的条纹数δx1为cmos1和cmos3两相机的拼接精度偏差;同样,实际cmos3的tdi成像图像上最后一个条纹的位置为b’,理想情况下cmos3的tdi成像图像上最后一个条纹的位置为b,b和b’之间的条纹数δx2为cmos2和cmos3两相机的拼接精度偏差。
33.本发明相机焦面光学无缝拼接的像元重叠精度测试装置提供了一种新的探究相
机焦面tdi cmos光学无缝拼接的片间像元重叠的精度的装置,在光学无缝拼接方面进行地面实验。本发明通过特殊的靶标图像5,在led显示屏1上显示,led控制装置2控制靶标图像5在led显示屏1上以一定速率移动,由光学拼接成像模拟系统3对靶标图像5进行成像,并将图像数据通过数据线传输至计算机4,计算机4采集靶标图像5的条纹信息进行搭接配准,分析实际成像,确定每片tdi cmos成像图片在靶标图像5上的位置,得出实际采集图像的像元重叠数与理论值的精度偏差,实现tdi cmos光学无缝拼接的片间像元重叠精度的快速测量。本发明相机焦面光学无缝拼接的像元重叠精度测试装置得到片间像元重叠精度的算法简单,计算用时短。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1