一种可调响应时频谱声源定位方法及系统
1.本发明涉及声源定位技术领域,特别是涉及一种可调响应时频谱声源定位方法及系统。
背景技术:
2.声源定位广泛的应用于许多领域,目前的声源定位方法从定位原理上可分为两类,一类是基于到时/到时差估计的两步定位方法,一类是基于波束形成的一步定位法。两步定位法的定位精度受限于时差估计精度和定位算法性能。高精度的时差/到时差估计需要高质量的数据,因此,两步定位法的抗干扰能力差。一步定位法能够充分利用信号的时间、能量以及频率信息,抗干扰能量强,定位精度高,应用范围广。但是上述方法都只考虑了阵列信号的时间信息,没有考虑频率信息对定位的约束,造成定位不准确。现有的一步定位法,例如srp
‑
phat,虽然该方法具有一定的抗噪性能,但是由于其利用了信号的全频段信息,由于噪声干扰造成定位空间能量分布存在大量局部极值,导致声源定位精度降低以及优化求解过程收敛速度慢等问题。
技术实现要素:
3.本发明的目的是提供一种可调响应时频谱声源定位方法及系统,以克服现有定位方法中定位精度低、定位速度慢的技术缺陷,提高定位精度和定位速度。
4.为实现上述目的,本发明提供了如下方案:
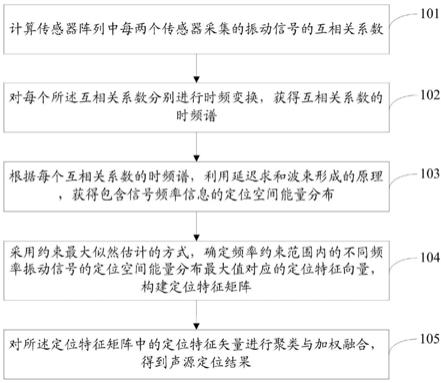
5.一种可调响应时频谱声源定位方法,所述定位方法包括如下步骤:
6.计算传感器阵列中每两个传感器采集的振动信号的互相关系数;
7.对每个所述互相关系数分别进行时频变换,获得互相关系数的时频谱;
8.根据每个互相关系数的时频谱,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布;
9.采用约束最大似然估计的方式,确定频率约束范围内的不同频率振动信号的定位空间能量分布最大值对应的定位特征向量,构建定位特征矩阵;
10.对所述定位特征矩阵中的定位特征矢量进行聚类与加权融合,得到声源定位结果。
11.可选的,所述根据每个互相关系数的时频谱,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布,具体包括:
12.根据每个互相关系数的时频谱,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布为:
13.其中,p(x,f)表示定位空间能量分布,τ(x)表示空间位置x到第i个传感器和第j个传感器之间的时差,f表示振动信号频率,表示第(i,j)个时频变换后的互相关系数r
i,j
的时频变换函数值;s
i
(t)表示第i个传感器采集的振动信号,表
示第j个传感器采集的振动信号s
j
(t+τ(x))的同步压缩s变换函数值,t表示第i个传感器采集振动信号的时间,n表示传感器阵列中传感器的数量。
14.可选的,所述采用约束最大似然估计的方式,确定频率约束范围内的不同频率振动信号的定位空间能量分布最大值对应的定位特征向量,构建定位特征矩阵,具体包括:
15.采用约束最大似然估计的方式,求解公式获得定位特征矩阵为a=[a1,a2,...,a
m
,...a
m
];
[0016]
其中,表示振动信号频率为f
m
时的定位空间能量分布最大值所在的位置向量,p(x,f
m
)表示振动信号频率为f
m
时的定位空间能量分布,a
m
表示振动信号频率f
m
对应的定位特征矢量,e
m
表示振动信号频率f
m
对应的空间可调响应谱能量,对应的空间可调响应谱能量,表示振动信号频率为f
m
时的定位空间能量分布中的位置向量处的能量,[f
min
,f
max
]表示频带范围,f
min
表示最小有效频率,f
max
表示最大有效频率。
[0017]
可选的,所述对所述定位特征矩阵中的定位特征矢量进行聚类与加权融合,得到声源定位结果,具体包括:
[0018]
将定位特征矩阵中振动信号频率与主频率最接近的定位特征矢量作为主聚类中心;
[0019]
利用所述主聚类中心对定位特征矩阵中的定位特征矢量进行二分类动态聚类,获得主聚类中心所在的类作为数据融合样本集;
[0020]
利用公式对数据融合样本集中的每个定位特征矢量进行加权融合,获得源定位结果;
[0021]
其中,φ表示源定位结果,w
n
表示数据融合样本集中的第n个定位特征矢量a
n
的权重,β
n
表示数据融合样本集中的第n个定位特征矢量与主聚类中心的欧式距离的倒数,β
l
表示数据融合样本集中的第l个定位特征矢量与主聚类中心的欧式距离的倒数,l表示数据融合样本集中定位特征矢量的数量。
[0022]
一种可调响应时频谱声源定位系统,所述定位系统包括:
[0023]
互相关系数计算模块,用于计算传感器阵列中每两个传感器采集的振动信号的互相关系数;
[0024]
时频变换模块,用于对每个所述互相关系数分别进行时频变换,获得互相关系数的时频谱;
[0025]
定位空间能量分布确定模块,用于根据每个时频变换后的互相关系数,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布;
[0026]
定位特征矩阵构建模块,用于采用约束最大似然估计的方式,确定频率约束范围内的不同频率振动信号的定位空间能量分布最大值对应的定位特征向量,构建定位特征矩阵;
[0027]
声源定位模块,用于对所述定位特征矩阵中的定位特征矢量进行聚类与加权融
合,得到声源定位结果。
[0028]
可选的,所述定位空间能量分布确定模块,具体包括:
[0029]
定位空间能量分布确定子模块,用于根据每个互相关系数的时频谱,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布为:
[0030]
其中,p(x,f)表示定位空间能量分布,τ(x)表示空间位置x到第i个传感器和第j个传感器之间的时差,f表示振动信号频率,表示第(i,j)个时频变换后的互相关系数r
i,j
的时频变换函数值;s
i
(t)表示第i个传感器采集的振动信号,表示第j个传感器采集的振动信号s
j
(t+τ(x))的同步压缩s变换函数值,t表示第i个传感器采集振动信号的时间,n表示传感器阵列中传感器的数量。
[0031]
可选的,所述定位特征矩阵构建模块,具体包括:
[0032]
定位特征矩阵构建子模块,用于采用约束最大似然估计的方式,求解公式获得定位特征矩阵为a=[a1,a2,...,a
m
,...a
m
];
[0033]
其中,表示振动信号频率为f
m
时的定位空间能量分布最大值所在的位置向量,p(x,f
m
)表示振动信号频率为f
m
时的定位空间能量分布,a
m
表示振动信号频率f
m
对应的定位特征矢量,e
m
表示振动信号频率f
m
对应的空间可调响应谱能量,对应的空间可调响应谱能量,表示振动信号频率为f
m
时的定位空间能量分布中的位置向量处的能量,[f
min
,f
max
]表示频带范围,f
min
表示最小有效频率,f
max
表示最大有效频率。
[0034]
可选的,所述声源定位模块,具体包括:
[0035]
主聚类中心确定子模块,用于将定位特征矩阵中振动信号频率与主频率最接近的定位特征矢量作为主聚类中心;
[0036]
数据融合样本集获取子模块,用于利用所述主聚类中心对定位特征矩阵中的定位特征矢量进行二分类动态聚类,获得主聚类中心所在的类作为数据融合样本集;
[0037]
加权融合子模块,用于利用公式对数据融合样本集中的每个定位特征矢量进行加权融合,获得源定位结果;
[0038]
其中,φ表示源定位结果,w
n
表示数据融合样本集中的第n个定位特征矢量a
n
的权重,β
n
表示数据融合样本集中的第n个定位特征矢量与主聚类中心的欧式距离的倒数,β
l
表示数据融合样本集中的第l个定位特征矢量与主聚类中心的欧式距离的倒数,l表示数据融合样本集中定位特征矢量的数量。
[0039]
与现有技术相比,本发明的有益效果是:
[0040]
本发明提出了一种可调响应时频谱声源定位方法及系统,所述定位方法包括:计
算传感器阵列中每两个传感器采集的振动信号的互相关系数;对每个所述互相关系数分别进行时频变换,获得互相关系数的时频谱;根据每个互相关系数的时频谱,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布;采用约束最大似然估计的方式,确定频率约束范围内的不同频率振动信号的定位空间能量分布最大值对应的定位特征向量,构建定位特征矩阵;对所述定位特征矩阵中的定位特征矢量进行聚类与加权融合,得到声源定位结果。本发明通过对互相关系数进行时频变换,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布,使获得的定位空间能量分布具有频率信息,然后进行约束最大似然估计,构建定位特征矩阵,克服没有考虑频率信息约束造成的定位不准确的技术缺陷,并进一步的采用聚类与加权融合方式提高定位精度和速度。
附图说明
[0041]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0042]
图1为本发明提供的一种可调响应时频谱声源定位方法的流程图;
[0043]
图2为本发明提供的一种可调响应时频谱声源定位方法的原理图。
具体实施方式
[0044]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0045]
本发明的目的是提供一种可调响应时频谱声源定位方法及系统,以克服现有定位方法中定位精度低,定位速度慢的技术缺陷,提高定位精度和定位速度。
[0046]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0047]
如图1和2所示,本发明提供一种可调响应时频谱声源定位方法,所述定位方法包括如下步骤:
[0048]
步骤101,计算传感器阵列中每两个传感器采集的振动信号的互相关系数。
[0049]
利用阵列传感器采集声源产生的振动数据,计算传感器对(i,j)的信号的互相关为r
i,j
(τ),
[0050][0051]
其中,j表示第j个传感器,t表示采集信号的时间,τ表示时间延迟,s
i
(t)表示第i个传感器采集到的信号,s
j
(t+τ)表示第j个传感器的采集信号时延信号。
[0052]
步骤102,对每个所述互相关系数分别进行时频变换,获得互相关系数的时频谱。
[0053]
通过(1)式可得srp
‑
phat(steered response power with phase transform,相位变换加权的可控响应功率声源定位)方法,是目前抗噪和抗多径干扰性能最好的定位方
法,其定位原理为:
[0054][0055]
式中p(x)表示定位空间能量分布,是计算得到的空间位置x到第i个传感器和第j个传感器之间的时差,x表示声源空间位置,||
·
||2为向量的2范数(距离),v为波传播速度。最大化p(x)所对应的空间位置就是声源的位置。虽然srp
‑
phat方法具有一定的抗噪性能,但是由于其利用了信号的全频段信息,由于噪声干扰造成p(x)存在大量局部极值,导致声源定位精度降低以及优化求解过程收敛速度慢等问题。
[0056]
为了克服srp
‑
phat方法存在的不足,本发明首先对r
i,j
(τ)进行时频变换,然后在时频域利用延迟求和波束形成获得可调空间响应谱。r
i,j
(τ)进行s变换的时频变换为:
[0057][0058]
其中,表示信号s
j
(t)的同步压缩s变换,表示互相关r
i,j
(τ)的时频变换。
[0059]
步骤103,根据每个互相关系数的时频谱,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布。
[0060]
步骤103所述根据每个时频变换后的互相关系数,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布,具体包括:根据每个时频变换后的互相关系数,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布为:其中,p(x,f)表示定位空间能量分布,τ(x)表示空间位置x到第i个传感器和第j个传感器之间的时差,f表示振动信号频率,表示第(i,j)个时频变换后的互相关系数r
i,j
的时频变换函数值;s
i
(t)表示第i个传感器采集的振动信号,表示第j个传感器采集的振动信号s
j
(t+τ(x))的同步压缩s变换函数值,t表示第i个传感器采集振动信号的时间,n表示传感器阵列中传感器的数量。
[0061]
具体的,令第i个传感器的位置为x
i
=[x
i
,y
i
,z
i
]
t
,根据延迟求和波束形成的原理可得:
[0062][0063]
式(3)表示的可调空间响应谱不仅含有空间位置变量x,而且是信号频率f的函数。这样就可以通过约束信号的频率f,获得更好的定位性能。
[0064]
步骤104,采用约束最大似然估计的方式,确定频率约束范围内的不同频率振动信号的定位空间能量分布最大值对应的定位特征向量,构建定位特征矩阵。
[0065]
步骤104所述采用约束最大似然估计的方式,确定频率约束范围内的不同频率振动信号的定位空间能量分布最大值对应的定位特征向量,构建定位特征矩阵,具体包括:采
用约束最大似然估计的方式,求解公式获得定位特征矩阵为a=[a1,a2,...,a
m
,...a
m
];其中,表示振动信号频率为f
m
时的定位空间能量分布最大值所在的位置向量,p(x,f
m
)表示振动信号频率为f
m
时的定位空间能量分布,a
m
表示振动信号频率f
m
对应的定位特征矢量,e
m
表示振动信号频率f
m
对应的空间可调响应谱能量,能量,表示振动信号频率为f
m
时的定位空间能量分布中的位置向量处的能量,[f
min
,f
max
]表示频带范围,f
min
表示最小有效频率,f
max
表示最大有效频率。
[0066]
具体的,由于传感器阵列采集信号时,往往会受到周围环境的影响,特别是对复杂环境,采集到的信号的信噪比较低。同时,采集到的阵列信号往往是在一个主要的频带内,并非所有频带都是有用信息。因此,通过约束信号频率f使得(3)式最大化过程中仅考虑信号主频带的可调空间响应谱能量,从而获得更好的定位结果。对阵列信号进行谱分析获得阵列信号的频带范围[f
min
,f
max
]及主频f0,将其作为约束条件解算p(x,f)的最大释然估计。上述最大化问题,可转化为约束优化问题
[0067][0068]
f
i
表示属于[f
min
,f
max
]范围的某一频率,上述约束优化问题可通过遗传算法等群智能优化方法进行求解,从而获得一系列对应于频带范围的定位结果及其对应的特征,表示为
[0069]
a=[a1,a2,...,a
i
,...a
m
]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0070]
其中a
i
是由频带内的频率f
i
、其对应的定位空间位置以及其对应的空间可调响应谱能量e
i
构成的矢量,即
[0071][0072]
其中,
[0073]
上述方法获得是可能是声源位置的一系列样本,这些样本既包含空间位置信息,也包含频率信息和能量信息。这些信息实际上就是定位所能利用的关键信息。这些信息的获取可为后续高精度融合定位提供基础。
[0074]
步骤105,对所述定位特征矩阵中的定位特征矢量进行聚类与加权融合,得到声源定位结果。
[0075]
步骤105所述对所述定位特征矩阵中的定位特征矢量进行聚类与加权融合,得到声源定位结果,具体包括:将定位特征矩阵中振动信号频率与主频率最接近的定位特征矢量作为主聚类中心;利用所述主聚类中心对定位特征矩阵中的定位特征矢量进行二分类动态聚类,获得主聚类中心所在的类作为数据融合样本集;利用公式对数据融合样本集中的每个定位特征矢量进行加权融合,获得源定位结果;其中,φ表示声源定位结
果,w
n
表示数据融合样本集中的第n个定位特征矢量a
n
的权重,β
n
表示数据融合样本集中的第n个定位特征矢量与主聚类中心的欧式距离的倒数,β
l
表示数据融合样本集中的第l个定位特征矢量与主聚类中心的欧式距离的倒数,l表示数据融合样本集中定位特征矢量的数量。
[0076]
具体的,步骤104已经获取了决定定位性能的关键信息,但仍然无法简单从中获得高精度的定位结果,需要进行数据挖掘以实现高精度定位。虽然步骤104已经获取了信号频带范围内的定位结果,但是由于波传播到不同传感器传播路径的不同,不同传感器采集信号能体现定位性能的信号频率并不完全一致。同时,由于噪声的干扰最大空间响应谱能量对应的空间位置也可能不是最佳定位结果。基于上述两点,本发明首先寻找a中与主频f0最接近的样本(f
m
最接近f0)作为动态聚类的一个聚类中心,对所获得的样本集a进行二分类动态聚类,剔除聚类中心不是a
m
的一类,保留聚类中心为a
m
的类(记为b)作为数据融合的样本。计算b中每一个样本a
n
与a
m
的欧氏距离的倒数β
n
。
[0077][0078]
其中,d
nm
=||a
n
‑
a
m
||2,a
n
∈b。由β
n
构造加权融合的加权系数w
n
;
[0079][0080]
利用所构造的加权系数,对b中的样本a
n
进行加权融合,获得最终的定位矢量φ。
[0081][0082]
φ对应的空间位置就是最终的定位结果。
[0083]
本发明还提供一种可调响应时频谱声源定位系统,所述定位系统包括:
[0084]
互相关系数计算模块,用于计算传感器阵列中每两个传感器采集的振动信号的互相关系数;
[0085]
时频变换模块,用于对每个所述互相关系数分别进行时频变换,获得互相关系数的时频谱;
[0086]
定位空间能量分布确定模块,用于根据每个互相关系数的时频谱,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布;
[0087]
所述定位空间能量分布确定模块,具体包括:定位空间能量分布确定子模块,用于根据每个时频变换后的互相关系数,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布为:其中,p(x,f)表示定位空间能量分布,τ(x)表示空间位置x到第i个传感器和第j个传感器之间的时差,f表示振动信号频率,表示第(i,j)个时频变换后的互相关系数r
i,j
的时频变换函
数值;s
i
(t)表示第i个传感器采集的振动信号,表示第j个传感器采集的振动信号s
j
(t+τ(x))的同步压缩s变换函数值,t表示第i个传感器采集振动信号的时间,n表示传感器阵列中传感器的数量。
[0088]
定位特征矩阵构建模块,用于采用约束最大似然估计的方式,确定频率约束范围内的不同频率振动信号的定位空间能量分布最大值对应的定位特征向量,构建定位特征矩阵。
[0089]
所述定位特征矩阵构建模块,具体包括:定位特征矩阵构建子模块,用于采用约束最大似然估计的方式,求解公式获得定位特征矩阵为a=[a1,a2,...,a
m
,...a
m
];
[0090]
其中,表示振动信号频率为f
m
时的定位空间能量分布最大值所在的位置向量,p(x,f
m
)表示振动信号频率为f
m
时的定位空间能量分布,a
m
表示振动信号频率f
m
对应的定位特征矢量,e
m
表示振动信号频率f
m
对应的空间可调响应谱能量,对应的空间可调响应谱能量,表示振动信号频率为f
m
时的定位空间能量分布中的位置向量处的能量,[f
min
,f
max
]表示频带范围,f
min
表示最小有效频率,f
max
表示最大有效频率。
[0091]
声源定位模块,用于对所述定位特征矩阵中的定位特征矢量进行聚类与加权融合,得到声源定位结果。
[0092]
所述声源定位模块,具体包括:主聚类中心确定子模块,用于将定位特征矩阵中振动信号频率与主频率最接近的定位特征矢量作为主聚类中心;数据融合样本集获取子模块,用于利用所述主聚类中心对定位特征矩阵中的定位特征矢量进行二分类动态聚类,获得主聚类中心所在的类作为数据融合样本集;加权融合子模块,用于利用公式对数据融合样本集中的每个定位特征矢量进行加权融合,获得源定位结果;其中,φ表示源定位结果,w
n
表示数据融合样本集中的第n个定位特征矢量a
n
的权重,β
n
表示数据融合样本集中的第n个定位特征矢量与主聚类中心的欧式距离的倒数,β
l
表示数据融合样本集中的第l个定位特征矢量与主聚类中心的欧式距离的倒数,l表示数据融合样本集中定位特征矢量的数量。
[0093]
与现有技术相比,本发明的有益效果是:
[0094]
本发明提出了一种可调响应时频谱声源定位方法及系统,所述定位方法包括:计算传感器阵列中每两个传感器采集的振动信号的互相关系数;对每个所述互相关系数分别进行时频变换,获得互相关系数的时频谱;根据每个互相关系数的时频谱,利用延迟求和波束形成的原理,获得包含信号频率信息的定位空间能量分布;采用约束最大似然估计的方式,确定频率约束范围内的不同频率振动信号的定位空间能量分布最大值对应的定位特征向量,构建定位特征矩阵;对所述定位特征矩阵中的定位特征矢量进行聚类与加权融合,得到声源定位结果。本发明通过对互相关系数进行时频变换,利用延迟求和波束形成的原理,
获得包含信号频率信息的定位空间能量分布,使获得的定位空间能量分布具有频率信息,然后进行约束最大似然估计,构建定位特征矩阵,克服没有考虑频率信息约束造成的定位不准确的技术缺陷,并进一步的采用聚类与加权融合方式提高定位精度和速度。
[0095]
本说明书中等效实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,等效实施例之间相同相似部分互相参见即可。
[0096]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1