基于MPSoC的认知雷达系统及方法
基于mpsoc的认知雷达系统及方法
技术领域
1.本发明属于通信技术领域,更进一步涉及雷达信号处理技术领域中的一种基于片上多核系统mpsoc(muti
‑
processor system
‑
on
‑
chip)的认知雷达系统及方法。本发明可用于雷达适应当前工作环境,更有效、准确的检测当前环境中的雷达目标。
背景技术:
2.随着雷达工作环境的日益复杂化、目标类型的多样化以及雷达执行任务的多元化,而传统雷达采用预先选定波形和接收处理方法的工作方式难以实时适应工作环境的变化,在受到蝙蝠在捕食过程中通过发射不同频率的信号探测环境的影响下,认知雷达的概念得以提出,以期在雷达发射和接收过程中具有自适应能力,并且目前用于构建认知雷达系统的硬件平台多采用fpga+dsp的双核心架构,其最大缺点就是所构建的系统的体积大,集成度低和功耗大。
3.航天恒星科技有限公司在其提出的专利申请文献“一种支持多波形的雷达信号发射与接收系统及方法”(专利申请号2018112329319,公开号cn 109375175 a)中公开了一种支持多波形的雷达信号发射与接收系统及方法。该系统由fpga模块和dsp模块组成,其中,fpga模块包括波形发送模块、回波接收模块和芯片配置模块,但是,该系统仍然存在的不足之处是,由于采用fpga+dsp的双核心架构,导致系统硬件平台尺寸大,从而导致整个雷达信号处理系统集成度低,功耗大,体积大。该专利申请方法的具体步骤是:波形发送模块采集外部输入的cpi信号和prf信号,并对cpi信号和prf信号均进行边沿提取得到波形发射脉冲信号;dsp模块发送指令给波形发送模块,波形发送模块根据指令输出波形标识;参数选择模块根据波形标识,得到相应的参数;当波形发射脉冲信号有效时,产生多路波形数据;将多路波形数据进行合成后发送da芯片;接收信号控制模块采集外部输入的cpi信号和prf信号,并对cpi信号和prf信号均进行边沿提取得到接收回波脉冲信号;当波形接收回波脉冲信号有效时,对ad芯片转换后的4路数字信号进行采集,输出采集后的数字信号;接收采集后的数字信号,并进行一定处理后得到降采样后的基带信号;根据降采样后的基带信号,分别进行通道校准、和差差、多普勒补偿处理后,得到3路信号;将3路信号分别进行信号处理后得到3路脉压数据;将3路脉压数据进行组帧后发送给dsp模块,该方法利用波形之间的动态切换,提高系统抗干扰性,但是,该方法仍然存在的不足之处是,由于发射机和接收机间通常采用开环系统,发射机发射的波形往往不受接收机接收的回波信号处理结果的控制,使得信号处理结果难以得到自适应改善。
4.北京无线电测量研究所在其提出的专利申请文献“雷达波形参数化控制方法及系统”(专利申请号2018112094648,公开号cn 109254268 a)中公开了雷达波形参数化控制方法。该专利申请方法的具体步骤是:s1,获取包含波形基本参数和波形应用策略的配置文件并解析,得到波形基本参数表和波形应用策略表;s2,遍历访问波形应用策略表,与待探测的空域位置进行匹配,确定所选择的波形应用策略;s3,从波形基本参数表中读取与所选择的波形应用策略对应的波形基本参数;s4,根据波形基本参数向空域位置发射波形。该方法
能够通过计算机软件对雷达工作波形进行自适应参数化控制,实现了雷达工作波形参数化控制,易于工程实现。但是,该方法仍然存在的不足之处是,由于该方法确定所选择的波形应用策略是匹配待探测的空域位置,在环境信息具有很强干扰,无法检测出目标空域位置时,波形参数控制效果不佳,难以实现对目标准确的检测。
技术实现要素:
5.本发明的目的在于针对上述已有技术的不足,提出一种基于片上多核系统mpsoc的认知雷达系统及方法,本发明采用单核心架构实现,性能优于现有技术下fpga+dsp的双核心架构,旨在解决雷达信号处理系统尺寸大,集成度低,功耗大的问题。
6.实现本发明目的的思路是,提出一种基于片上多核系统mpsoc的认知雷达系统及方法,该系统通过对环境信息进行采集和感知,选出适应当前雷达工作环境抗干扰波形并发射出去,由采集到发射形成反馈闭环,提高雷达的抗干扰能力,再对该波形所对应的雷达回波进行一系列信号处理算法检测目标,调整雷达作用范围,至此实现依据环境信息的变化而控制发射波形的功能,使雷达具有智能化适应环境的能力,能有效、准确的检测目标,同时在雷达系统中发射机和接收机之间引入反馈系统,通过反馈闭环提高雷达的抗干扰能力,使雷达具有智能化适应环境的能力。
7.为实现上述目的,本发明系统包括上位机和信号处理机,所述信号处理机中包括a/d采集控制模块、pl端预处理模块、arm处理器模块和d/a波形发射模块;所述pl端预处理模块采用低功耗可编程逻辑器件,pl端预处理模块包括脉冲压缩子模块、脉冲存储子模块、逆傅里叶变换ifft子模块和图像拼接子模块;所述arm处理器模块采用arm处理器,arm处理器模块包括目标检测子模块和波形选择子模块:
8.所述上位机,用于接收并显示检测出的目标所处一位距离像中的位置段;
9.所述a/d采集控制模块,用于通过ad芯片采集环境干扰信息一个脉冲重复周期时长的数据,得到环境干扰信息的数据,或者按照帧同步和脉冲同步采集d/a波形发射模块发射的模拟波形的回波数据,并实现数字下变频的信号处理,得到数字下变频后的数字基带信号;
10.所述脉冲压缩子模块,用于对数字下变频后的数字基带信号依次进行傅里叶变换fft操作、频域复乘的匹配滤波以及逆傅里叶变换ifft操作,得到四路脉冲压缩后的数据;
11.所述脉冲存储子模块,用于对脉冲压缩后的数据按照与d/a波形发射模块发射模拟波形时相同的帧同步信号计数,并以乒乓方式将脉冲压缩后的数据存入pl端预处理模块外挂的ddr4存储器内;
12.所述逆傅里叶变换ifft子模块,用于按照与发射模拟波形时相同的脉冲同步信号的次序,依次从ddr4存储器中读取每个脉冲处于同一距离单元中的脉冲压缩后的数据,对得到的每组相同距离单元排列下的数据进行逆傅里叶变换ifft操作,将所有逆变换后的数据组成脉冲矩阵;
13.所述图像拼接子模块,用于利用改进的舍弃法,获取目标高分辨的一维距离像;
14.所述目标检测子模块,用于对目标高分辨的一维距离像进行目标检测,若判定一位距离像中存在目标,将检测出的目标所处一位距离像中的位置段上报上位机,否则,执行更新发射波形参数;
15.所述波形选择子模块,用于将当前波形参数中的发射脉冲宽度和脉冲重复周期的选值各自步进5微秒,并保留当前波形参数中的发射信号中心频率和发射信号频率步进量共同作为更新后的待发射波形参数,执行发射模拟波形。
16.所述d/a波形发射模块,用于通过da芯片将待发射波形参数对应的波形数据转化成模拟波形,按照帧同步信号和脉冲同步信号发射模拟波形。
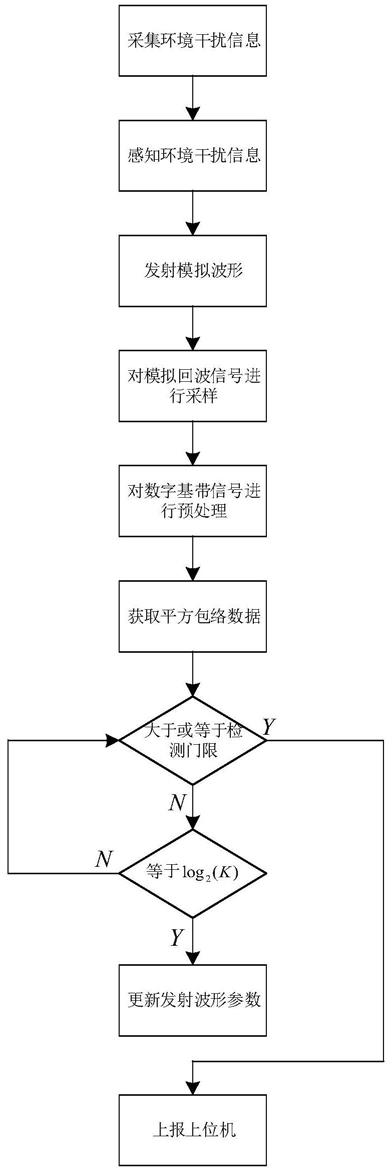
17.本发明基于片上多核系统mpsoc的认知雷达方法的步骤包括如下:
18.步骤1,采集环境干扰信息:
19.a/d采集控制模块通过ad芯片采集环境干扰信息一个脉冲重复周期时长的数据,得到环境干扰信息的数据;
20.步骤2,感知环境干扰信息:
21.arm处理器模块中的波形选择子模块对环境干扰信息的数据进行傅里叶变换fft操作,提取变换后频谱中最大幅值点对应的频率,将大于且最靠近该频率的整数频率值作为待发射波形参数中的发射信号中心频率;
22.步骤3,发射模拟波形:
23.d/a波形发射模块中的da芯片,将待发射波形参数对应的波形数据转化成模拟波形,按照帧同步信号和脉冲同步信号发射模拟波形;
24.步骤4,对模拟回波信号进行采样:
25.a/d采集控制模块中的ad芯片,按照帧同步和脉冲同步采集d/a波形发射模块发射的模拟波形的回波数据,并实现数字下变频的信号处理,得到数字下变频后的数字基带信号;
26.步骤5,对数字基带信号进行预处理:
27.pl端预处理模块中的脉冲压缩子模块对数字下变频后的数字基带信号依次进行傅里叶变换fft操作、频域复乘的匹配滤波以及逆傅里叶变换ifft操作,得到四路脉冲压缩后的数据;
28.pl端预处理模块中的脉冲存储子模块对脉冲压缩后的数据按照与步骤3相同的帧同步信号计数,并以乒乓方式将脉冲压缩后的数据存入pl端预处理模块外挂的ddr4存储器内;
29.pl端预处理模块中的逆傅里叶变换ifft子模块,按照与步骤3发射模拟波形时相同的脉冲同步信号的次序,依次从ddr4存储器中读取每个脉冲处于同一距离单元中的脉冲压缩后的数据,对得到的每组相同距离单元排列下的数据进行逆傅里叶变换ifft操作,将所有逆变换后的数据组成脉冲矩阵;
30.pl端预处理模块中的图像拼接子模块利用改进的舍弃法,获取目标高分辨的一维距离像;
31.步骤6,获取平方包络数据:
32.arm处理器模块中的目标检测子模块对目标高分辨的一维距离像中每个数据单元逐个进行平方操作,并对其结果进行降序排列,得到平方包络数据;
33.步骤7,从降序排列的平方包络数据中取2
n
个一组数据求和,判断和值是否大于或等于检测门限,若是,则判定一位距离像中存在目标,执行步骤10,否则,执行步骤8,其中,n的取值为0,1,2
…
log2k,k表示一维距离像中存在目标的强散射点总数,log2表示以2为底的
对数操作;
34.步骤8,判断n是否等于log2k,若是,则判定目标不存在,执行步骤9,否则,令n=n+1后执行步骤7;
35.步骤9,更新发射波形参数:
36.arm处理器模块中的波形选择子模块将当前波形参数中的发射脉冲宽度和脉冲重复周期的选值各自步进5微秒,并保留当前波形参数中的发射信号中心频率和发射信号频率步进量共同作为更新后的待发射波形参数,执行步骤3;
37.步骤10,将检测出的目标所处一位距离像中的位置段上报上位机。
38.本发明与现有技术相比具有如下优点:
39.第一,由于本发明系统中的pl端预处理模块和arm处理器模块是基于单核心架构下片上多核系统mpsoc进行实现,该单核心架构将完整的arm处理器与低功耗可编程逻辑器件紧密集成在一起,通过内部axi总线接口实现高速数据通信,克服了传统fpga+dsp双核心架构尺寸大、集成度低、功耗大、通信数据传输速度慢、握手协议复杂和容易受到外界环境干扰的问题,具有硬件资源丰富、可扩展性强、高速接口种类多等特点,同时可外挂大量的存储器,以满足该系统对处理大数据量和运行复杂算法的要求,使本发明系统具有小型化、低功耗和数据传输速度快的优点;
40.第二,由于本发明系统中的a/d采集控制模块21和d/a波形发射模块24采用jesd204b协议编码和传输数据,克服了现有ad/da引脚数多、布线复杂,使得所构建的系统的体积大的问题,使本发明系统结构紧凑,传输速率稳定高效,系统设计得到简化;
41.第三,由于本发明的方法采集并感知环境干扰信息后,再发射模拟波形,克服了现有技术中发射机和接收机间因采用开环系统而带来的发射机发射的波形往往不受接收机接收的回波信号处理结果控制的问题,使得本发明进行信号处理时降低了环境干扰,自适应于雷达当前的工作环境。
42.第四,由于本发明的方法根据目标检测结果更新发射波形参数,自适应改善雷达探测范围,克服了现有雷达探测范围受限,目标检测效果不佳的问题,使本发明的方法能有效检测雷达目标。
附图说明
43.图1是本发明系统的结构示意图;
44.图2是本发明方法的流程图。
具体实施方式:
45.下面结合附图对本发明做进一步的详细描述。
46.参照图1,对本发明的系统作进一步的描述。
47.本发明的系统包括上位机1和信号处理机2,其中:所述信号处理机2中包括a/d采集控制模块21、pl端预处理模块22、arm处理器模块23和d/a波形发射模块24;所述pl端预处理模块22采用低功耗可编程逻辑器件,外挂一片2gb容量的ddr4存储器芯片,pl端预处理模块22包括脉冲压缩子模块221、脉冲存储子模块222、逆傅里叶变换ifft子模块223和图像拼接子模块224;所述arm处理器模块23采用arm处理器,外挂四片2gb容量的ddr4存储器芯片,
arm处理器模块23包括目标检测子模块231和波形选择子模块232。
48.所述上位机1,用于接收并显示检测出的目标所处一位距离像中的位置段。
49.所述a/d采集控制模块21采用四通道的14位500msps的ad9694芯片,采样时钟由外部参考时钟通过sma接口输入到时钟芯片ad9516经倍频后得到。ad9694针对宽输入带宽、高采样速率、出色的线性度和小封装低功耗而优化。这款四通道adc内核采用多级、差分流水线架构,并集成了输出纠错逻辑。每个adc均具有宽带宽缓冲输入,支持用户可选的各种输入范围。集成基准电压源可简化设计,模拟输入和时钟信号均为差分输入信号。ad9694芯片内部具有四个数字下变频单元,该单元由nco、半带滤波器和fir滤波器、增益控制和复信号转化实信号模块组成,可对采样的数据进行滤波和抽取处理,支持灵活的实信号和复信号的输入输出选择,实现数字下变频的信号处理。
50.所述a/d采集控制模块21,用于通过ad芯片采集环境干扰信息一个脉冲重复周期时长的数据,得到环境干扰信息的数据,或者按照帧同步和脉冲同步采集d/a波形发射模块24发射的模拟波形的回波数据,并实现数字下变频的信号处理,得到数字下变频后的数字基带信号。
51.所述脉冲压缩子模块221,用于对数字下变频后的数字基带信号依次进行傅里叶变换fft操作、频域复乘的匹配滤波以及逆傅里叶变换ifft操作,得到四路脉冲压缩后的数据。
52.所述脉冲存储子模块222,用于对脉冲压缩后的数据按照与d/a波形发射模块24发射模拟波形时相同的帧同步信号计数,并以乒乓方式将脉冲压缩后的数据存入pl端预处理模块22外挂的ddr4存储器内。
53.所述逆傅里叶变换ifft子模块223,用于按照与发射模拟波形时相同的脉冲同步信号的次序,依次从ddr4存储器中读取每个脉冲处于同一距离单元中的脉冲压缩后的数据,对得到的每组相同距离单元排列下的数据进行逆傅里叶变换ifft操作,将所有逆变换后的数据组成脉冲矩阵。
54.所述图像拼接子模块224,用于利用改进的舍弃法,获取目标高分辨的一维距离像。
55.所述目标检测子模块231,用于对目标高分辨的一维距离像进行目标检测,若判定一位距离像中存在目标,将检测出的目标所处一位距离像中的位置段上报上位机1,否则,执行更新发射波形参数。
56.所述波形选择子模块232,用于将当前波形参数中的发射脉冲宽度和脉冲重复周期的选值各自步进5微秒,并保留当前波形参数中的发射信号中心频率和发射信号频率步进量共同作为更新后的待发射波形参数,执行发射模拟波形。
57.所述d/a波形发射模块24采用双收发通道、高性能和高集成度的ad9371芯片,其工作频率范围为300mhz至6ghz。ad9371芯片内部将辅助模数转换器、辅助数模转换器和通用输入/输出gpios集成在一起,提供额外的监视和控制能力,其每个收发通道均包括直流偏置校正、正交误差校正qec和可编程数字滤波器。
58.所述d/a波形发射模块24,用于通过da芯片将待发射波形参数对应的波形数据转化成模拟波形,按照帧同步信号和脉冲同步信号发射模拟波形。
59.下面参照附图2,对本发明基于片上多核系统mpsoc的认知雷达方法作进一步的描
述。
60.步骤1,采集环境干扰信息。
61.a/d采集控制模块21通过ad芯片采集环境干扰信息一个脉冲重复周期时长的数据,得到环境干扰信息的数据。
62.步骤2,感知环境干扰信息。
63.arm处理器模块23中的波形选择子模块232对环境干扰信息的数据进行傅里叶变换fft操作,提取变换后频谱中最大幅值点对应的频率,将大于且最靠近该频率的整数频率值作为待发射波形参数中的发射信号中心频率。
64.步骤3,发射模拟波形。
65.d/a波形发射模块24中的da芯片,将待发射波形参数对应的波形数据转化成模拟波形,按照帧同步信号和脉冲同步信号发射模拟波形。
66.所述的待发射波形参数包括初始默认值为5微秒的发射信号脉冲宽度、初始默认值为50微秒的发射信号脉冲重复周期、默认值为6兆赫兹的发射信号频率步进量和发射信号中心频率。
67.步骤4,对模拟回波信号进行采样。
68.a/d采集控制模块21中的ad芯片,按照帧同步和脉冲同步采集d/a波形发射模块24发射的模拟波形的回波数据,并实现数字下变频的信号处理,得到数字下变频后的数字基带信号。
69.步骤5,对数字基带信号进行预处理。
70.pl端预处理模块22中的脉冲压缩子模块221对数字下变频后的数字基带信号依次进行傅里叶变换fft操作、频域复乘的匹配滤波以及逆傅里叶变换ifft操作,得到四路脉冲压缩后的数据。
71.pl端预处理模块22中的脉冲存储子模块222对脉冲压缩后的数据按照与步骤3相同的帧同步信号计数,并以乒乓方式将脉冲压缩后的数据存入pl端预处理模块22外挂的ddr4存储器内。
72.pl端预处理模块22中的逆傅里叶变换ifft子模块223,按照与步骤3发射模拟波形时相同的脉冲同步信号的次序,依次从ddr4存储器中读取每个脉冲处于同一距离单元中的脉冲压缩后的数据,对得到的每组相同距离单元排列下的数据进行逆傅里叶变换ifft操作,将所有逆变换后的数据组成脉冲矩阵。
73.pl端预处理模块22中的图像拼接子模块224利用改进的舍弃法,获取目标高分辨的一维距离像。
74.所述改进的舍弃法的具体步骤如下:
75.第1步,由脉冲矩阵中数据的幅值最大点,得到该幅值最大点在脉冲矩阵中的距离单元数和脉冲数。
76.第2步,按照下式,计算脉冲矩阵中每组相同距离单元中待拼接数据总数:
[0077][0078]
其中,w
m
表示脉冲矩阵中第m组相同距离单元中待拼接数据总数,m的取值为0,1,
2,
…
,r
‑
1,r表示脉冲矩阵中相同距离单元总数,trunc表示向下取整操作,r
s
表示雷达距离分辨率,r
s
=ct
s
/2,c表示光速,t
s
表示距离单元的采样周期,δr表示一维距离像中的雷达最小分辨率,δr=c/(2nδf),n表示相邻两个帧同步信号间的脉冲同步信号总数,δf表示发射信号频率步进量,∑表示求和操作,w
i
表示脉冲矩阵中第i组相同距离单元中待拼接数据总数,i表示脉冲矩阵中相同距离单元的序号,其取值为0,1,2,
…
,m
‑
1。
[0079]
第3步,按照下式,计算每组相同距离单元中待拼接数据的起始点和终止点,并将该组起始点到终止点间的脉冲矩阵数据,作为该组相同距离单元中待拼接数据:
[0080]
p
x
=(q
x
‑1+1)mod[n]
[0081]
q
x
‑1=(p
x
‑1+w
m
‑
1)mod[n]
[0082]
其中,p
x
表示第x组相同距离单元中待拼接数据的起始点,q
x
‑1表示第x
‑
1组相同距离单元中待拼接数据的终止点,将第一步得到的距离单元数和脉冲数作为x和p
x
的初始值,mod表示求余数操作,p
x
‑1表示第x
‑
1组相同距离单元中待拼接数据的起始点。
[0083]
第4步,判断当前的x是否大于初始值,若是,执行本步骤的第6步,否则,执行本步骤的第5步。
[0084]
第5步,判断当前的x是否等于1,若是,令x和p
x
等于初始值后执行本步骤的第6步,否则,令x=x
‑
1后执行本步骤的第3步。
[0085]
第6步,判断当前的x是否等于r,若是,执行本步骤的第7步,否则,令x=x+1后执行本步骤的第3步.
[0086]
第7步,将各组相同距离单元中待拼接数据按照相同距离单元数的升序排列依次拼接,得到目标高分辨的一维距离像。
[0087]
步骤6,获取平方包络数据。
[0088]
arm处理器模块23中的目标检测子模块231对目标高分辨的一维距离像中每个数据单元逐个进行平方操作,并对其结果进行降序排列,得到平方包络数据。
[0089]
在本发明实施例中,所述arm处理器模块23中的目标检测子模块231得到的目标高分辨的一维距离像是pl端预处理模块22通过直接内存存取dma传输实现,直接内存存取dma传输采用axi总线高速接口和中断的方式,以axi
‑
lite接口配置每次传输的地址和数据长度,以axi4
‑
stream接口传输大量数据。
[0090]
步骤7,从降序排列的平方包络数据中取2
n
个一组数据求和,判断和值是否大于或等于检测门限,若是,则判定一位距离像中存在目标,执行步骤10,否则,执行步骤8,其中,n的取值为0,1,2
…
log2k,k表示一维距离像中存在目标的强散射点总数,log2表示以2为底的对数操作。
[0091]
所述的检测门限为u=α
×
γ,其中,α表示一维距离像所有数据单元的均值,γ表示检测门限系数,该系数由雷达的虚警概率与所取降序排列的平方包络数据个数按照检测门限系数计算公式计算得到。
[0092]
步骤8,判断n是否等于log2k,若是,则判定目标不存在,执行步骤9,否则,令n=n+1后执行步骤7。
[0093]
步骤9,更新发射波形参数。
[0094]
arm处理器模块23中的波形选择子模块232将当前波形参数中的发射脉冲宽度和脉冲重复周期的选值各自步进5微秒,并保留当前波形参数中的发射信号中心频率和发射
信号频率步进量共同作为更新后的待发射波形参数,执行步骤3。
[0095]
步骤10,将检测出的目标所处一位距离像中的位置段上报上位机1。所采用的通信方式为rs422接口的串口协议通信,通过adm2587芯片实现差分信号到单端的转换。在本发明的实施例中rs422接口的串口协议通信中,波特率设置为115.2ksps,八位数据,一位偶校验位,数据的传输按照一定的帧格式,每帧数据的起始包头为十六进制双帧头a5a51234a5a51234固定值,保障传输过程的稳健性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1