车载毫米波雷达的探测角度实车标定系统的制作方法
[0001]
本实用新型属于高级驾驶辅助系统(adas)领域,具体涉及一种车载毫米波雷达的探测角度实车标定系统。
背景技术:
[0002]
在现有技术中,车载毫米波雷达在下线时会做一次标定,下线标定是通过一个工装,这个工装需要将雷达单体放到工装上,将雷达在制造过程中 (比如天线罩装偏)产生的误差补偿掉,之后装配到整车上。车载毫米波雷达在下线的时候会对雷达单体的测量角度距离精度做一次补偿,从而使雷达在生产过程中所产生的误差被抵消。
[0003]
然而,目前线下仅仅对雷达的安装角度偏差进行校正,下线标定的工装的结构和原理都不能应用于雷达实车标定,车载毫米波雷达装到整车上后,车辆的保险杠会对雷达的探测角度造成一定影响,而对于雷达的这一影响是未知的。雷达被主机厂装配到整车上后,由于雷达外面会有后保险杠或美观罩等其它车身部件,对雷达发送和接收的波束造成一定的削弱和折射,从而对雷达探测到的目标所在位置的角度精度产生影响。
[0004]
目前没有一个方案是解决后保险杠和美观罩对雷达探测角度偏差影响的。
[0005]
下线标定是通过一个工装,将雷达放上去,将雷达在制造过程中(比如天线罩装偏)产生的误差补偿掉。这个工装需要将雷达单体放到工装上,此工装的结构和原理都不能应用于雷达实车标定。
技术实现要素:
[0006]
本实用新型的目的在于提供一种车载毫米波雷达的探测角度实车标定系统,以根据目标的真实角度与待测雷达在此角度下探测的角度位置标定待测雷达在此角度下的偏差。
[0007]
为了实现上述目的,本实用新型提供一种车载毫米波雷达的探测角度实车标定系统,其用于实车标定一覆盖有后保险杠的待测雷达,包括一目标旋转中心确定系统、安装于一旋转驱动系统上且与所述目标旋转中心确定系统通过一旋转臂连接的目标高度调节系统、安装于所述旋转臂上的目标模拟器。
[0008]
所述目标旋转中心确定系统包括一底座、固定在该底座上的旋转中心接头,所述旋转臂的固定端固定在所述旋转中心接头上。
[0009]
所述旋转中心接头上配备有一编码器,以测量所述旋转臂的旋转角度。
[0010]
所述底座包括两个底座横梁和可调节地安装于两个底座横梁上的底座圆盘,所述旋转中心接头固定在底座的底座圆盘上。
[0011]
所述底座上设有一可拆卸地卡接在所述底座圆盘上的旋转中心确定仪。
[0012]
所述旋转中心确定仪具有一支撑杆以及安装于所述支撑杆并与底座横梁的延伸方向平行的一上部竖直平面,所述支撑杆卡接在所述底座圆盘上,所述上部竖直平面的中间设有一在竖直方向上与所述旋转中心接头对齐的缝隙。
[0013]
所述旋转驱动系统包括一安装支架和设于安装支架的底部的驱动轮,驱动轮与一水平调节电机连接;所述目标高度调节系统安装于所述旋转驱动系统的安装支架上,其包括一纵向调节电机和与该纵向调节电机连接的一活动端接头,所述旋转臂的活动端固定在所述活动端接头上。
[0014]
所述旋转臂上装配有一水平传感器,以感测所述旋转臂是否在水平方向有偏差角。
[0015]
所述目标模拟器通过一目标模拟器支架固定在旋转臂上。
[0016]
所述车载毫米波雷达的探测角度实车标定系统还包括一目标位置校准系统,所述目标位置校准系统包括设于所述目标模拟器支架和旋转臂之间的金属校准器以及安装在目标模拟器的上方的激光器。
[0017]
本实用新型的车载毫米波雷达的探测角度实车标定系统采用旋转臂实现了目标旋转中心确定系统和目标高度调节系统的连接,使得旋转臂受到目标高度调节系统底部的旋转驱动系统的驱动,旋转臂的旋转角度为目标相对于待测雷达的真实角度,根据该真实角度与待测雷达在此角度下探测的角度位置,可以标定待测雷达在此角度下的偏差;此外,本实用新型采用目标高度调节系统,避免了目标在旋转过程中受地面平整度影响,解决了目标无法保证和雷达始终处于同一平面的问题。此外,本实用新型采用可拆卸的旋转中心确定仪与缝隙和待测雷达的发射中心对齐,使得实车标定系统的旋转中心接头12和雷达的发射中心同轴,解决了目标旋转中心和雷达发射中心不对齐问题,进而保证旋转臂的旋转角度为雷达探测的真实角度。
附图说明
[0018]
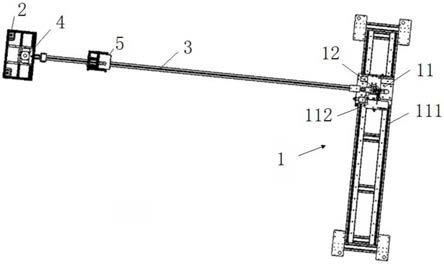
图1是根据本实用新型的一个实施例的车载毫米波雷达的探测角度实车标定系统的正视图。
[0019]
图2是如图1所示的车载毫米波雷达的探测角度实车标定系统的俯视图。
[0020]
图3为如图1所示的车载毫米波雷达的探测角度实车标定系统的目标旋转中心确定系统在安装旋转中心确定仪的情况下的结构图。
[0021]
图4为如图1所示的车载毫米波雷达的探测角度实车标定系统的目标旋转中心确定系统在拆除旋转中心确定仪后的结构图。
[0022]
图5为如图1所示的车载毫米波雷达的探测角度实车标定系统的旋转中心确定仪的结构图。
[0023]
图6为如图1所示的车载毫米波雷达的探测角度实车标定系统的旋转驱动系统和目标高度调节系统的装配结构图。
[0024]
图7为如图1所示的车载毫米波雷达的探测角度实车标定系统的目标模拟器和目标位置校准系统的装配结构图。
[0025]
图8为如图7所示的目标位置校准系统的金属校准器的安装位置示意图。
具体实施方式
[0026]
下面结合附图,给出本实用新型的较佳实施例,并予以详细描述。
[0027]
如图1和图2所示为根据本实用新型的一个实施例的车载毫米波雷达的探测角度
实车标定系统,其用于实车标定一车载的待测雷达,即针对后保或覆盖在雷达表面的装饰件进行角度校正,以实现雷达探测fov内每一度的校准。所述车载毫米波雷达的探测角度实车标定系统包括一目标旋转中心确定系统1、安装于一旋转驱动系统2上且与所述目标旋转中心确定系统1通过一旋转臂3连接的目标高度调节系统4、安装于所述旋转臂3上的目标模拟器 5。由此,旋转臂3实现了目标旋转中心确定系统1和目标高度调节系统4的连接,使得旋转臂3受到目标高度调节系统4底部的旋转驱动系统2的驱动,旋转臂3的旋转角度即为目标模拟器5(相当于目标)相对待测雷达的法线(垂直于雷达表面)的真实角度,根据该真实角度与待测雷达在此角度下探测的角度位置,可以标定待测雷达在此角度下的偏差。
[0028]
如图2-图4所示,所述目标旋转中心确定系统1包括一底座11、固定在该底座11上的旋转中心接头12。所述底座11用于放置在待测雷达和后保险杠的下方(图未示)。所述旋转臂3的固定端固定在所述旋转中心接头12 上,以保证在旋转的过程中,旋转臂3的旋转中心位置不变。所述旋转中心接头12上配备有一编码器,以测量旋转臂3的旋转角度,进而得到目标相对待测雷达的法线(垂直于雷达表面)的真实角度,将该真实角度与待测雷达在此角度下探测的角度位置比较,可以标定待测雷达在此角度下的偏差。该旋转角度的精度可以达到0.1
°
。编码器与一控制器(图未示)连接,以将测量结果发送给控制器。在本实施例中,所述旋转臂3的旋转方向为顺时针方向,旋转臂3会以1
°
为单位运行,比如在1
°
位置,停留2s,用待测雷达采集目标模拟器5的信息(即目标信息),此时这组数据就是1
°
的数据,将待测雷达探测到的目标模拟器5的角度记为1
°
,如果有偏差就进行补偿,以此类推。
[0029]
所述底座11包括两个底座横梁111和可调节地安装于两个底座横梁 111上的底座圆盘112。所述旋转中心接头12固定在底座11的底座圆盘112 上,从而可以在底座横梁111上进行水平方向上的小幅滑动,做位置调整。此外,所述底座11上还设有一可拆卸地卡接在所述底座圆盘112上的旋转中心确定仪13,从而可以在确定好旋转中心接头12的位置后,将旋转中心确定仪13拆掉。
[0030]
如图3、图5所示,旋转中心确定仪13具有一支撑杆131以及安装于所述支撑杆131并与底座横梁111的延伸方向平行的一上部竖直平面132,所述支撑杆131卡接在所述底座圆盘112上,所述上部竖直平面132的中间设有一在竖直方向上与所述旋转中心接头12对齐的缝隙133。待测雷达会被后保险杠遮挡,由此,在采用本实用新型的车载毫米波雷达的探测角度实车标定系统进行测量前,需要先将后保险杠拆卸下来,将待测雷达裸露在外面。在旋转中心确定仪13装配到底座圆盘上之后,最终只要保证上部竖直平面132 和待测雷达的表面完全贴合则可以保证底座横梁111的延伸方向和待测雷达的平面平行,并通过移动底座圆盘112的位置,使得缝隙133和待测雷达的发射中心对齐,则可以使得实车标定系统的旋转中心接头12和雷达的发射中心同轴,解决了目标旋转中心和雷达发射中心不对齐问题,进而保证旋转臂的旋转角度为雷达探测的真实角度。一切都调好后,拆卸旋转中心确定仪13,并将后保险杠重新装上,随后开始实车标定测量。
[0031]
如图6所示,旋转驱动系统2包括一安装支架21和设于安装支架21 的底部的驱动轮22,驱动轮22与一水平调节电机(图未示)连接,以采用独立的驱动轮22和该水平调节电机驱动,而不需要在旋转中心设置驱动电机。水平调节电机位于驱动轮22的内部,水平调节电机与所述控制器连接,以根据控制器发送的指令进行运转。由此,当驱动轮22转动后,带动其上方的旋转臂3和目标高度调节系统4跟着旋转。在本实施例中,所述安装支架21为一
矩形金属框架。
[0032]
目标高度调节系统4安装于所述旋转驱动系统2的安装支架21上,其包括一纵向调节电机41和与该纵向调节电机41连接的一活动端接头42,所述旋转臂3的活动端固定在所述活动端接头42上。所述纵向调节电机41根据控制电脑发过来的指令,控制旋转臂3的水平高度,使旋转臂3始终保持水平。由此,所述目标高度调节系统4通过安装支架21支撑所述旋转臂3,纵向调节电机41装配在安装支架21的上方。纵向调节电机41与所述控制器连接,以根据控制器发送的指令进行运转,进而调节旋转臂3的水平位置高度,最终始终使旋转臂3上的目标模拟器5相对于待测雷达处于同一水平位置。由此,解决了目标在旋转过程中受地面平整度影响,无法保证和待测雷达始终处于同一水平位置的问题。
[0033]
所述旋转臂3上装配有一水平传感器,以感测旋转臂3是否在水平方向有偏差角。所述水平传感器与所述控制器连接,如果有偏差角,则水平传感器发送角度偏差信号给所述控制器,控制器发送指令以驱动纵向调节电机 41,调节旋转臂3使得目标模拟器5相对于待测雷达处于同一水平位置。在本实施例中,所述旋转臂3为一金属型材。
[0034]
如图7所示,目标模拟器5通过一目标模拟器支架51固定在旋转臂3 上。目标模拟器5通过螺钉固定在目标模拟器支架51上,目标模拟器支架51 通过螺钉固定在旋转臂3上。在旋转臂3跟着旋转后,目标模拟器5的位置也随之改变。在本实施例中,所述目标模拟器5为多普勒发生器,其可以模拟一个运动的目标。
[0035]
如图1、图7和图8所示,所述车载毫米波雷达的探测角度实车标定系统还包括一目标位置校准系统6。所述目标位置校准系统6包括设于目标模拟器支架51和旋转臂3之间的金属校准器61以及安装在目标模拟器5的上方的激光器62,使得目标位置校准系统6通过金属校准器61和激光器62确定本实用新型的车载毫米波雷达的探测角度实车标定系统在运转过程中,目标模拟器5发射的中心位置是否正对待测雷达的发射中心。如果所述待测雷达的发射中心和目标模拟器5的中心位置在同一直线上,那么激光器62会在待测雷达的表面打出一条光影。金属校准器61和旋转臂3牢固卡接不留缝隙,从而确保激光器62的位置准确性。
[0036]
以上所述的,仅为本实用新型的较佳实施例,并非用以限定本实用新型的范围,本实用新型的上述实施例还可以做出各种变化。凡是依据本实用新型申请的权利要求书及说明书内容所作的简单、等效变化与修饰,皆落入本实用新型专利的权利要求保护范围。本实用新型未详尽描述的均为常规技术内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1